:запаздывания, третий 8, четвертый 12, второй 17 и первый 22 блоки вычитания, вторую 10 и первую 14 моде ли рецикла без запаздывания, второй II и первый 20 экстраполяторы, регулирующий блок 21 и задатчик 23. В системе регулирования с помощью моделей объекта оценивается и экстра 1295365
полируется приведенное возмущение, а также исключается отрицательное влияние рецикла. Характеристическое уравнение системы не содержит запаздываний, что позволяет увеличить коэффициенты регулирующего блока и повысить точность регулирования. 1 ил,
1
Изобретение относится к автоматическому управлению и регулированию и может быть использовано при автоматическом управлении объектами с рециклом, содержащими запаздывания на входе, а также в прямом и обратном рециркуляционной части и подверженными влиянию неконтролируемых возмущений и контролируе1Ф1х возмущений по заданному входу.
Динамика объекта по каналу регулирования описывается передаточной функцией
eiElei:
cf (Р) -TiTp- ys -Tif t ye-- .- . Р-Р
(1)
где с (р) - передаточная функция прямого канала рециркуляционной части объекта без учета запаздывания; Cf (р) - передаточная функция в
цепи положительной обратной связи (обратном канале) без учета запаздывания;
C i ogi o p - время запаздывания соответственно на входе объекта, в прямом и обратном каналах рециркуляционной части объекта. Параметры модели (1) практически не изменяются во времени, а неконтролируемые возмущения имеют нестационарные статистические свойства. .Задача регулирования заключаемся в обеспечении инвариантности выходной координаты объекта от контролируе- N&1X и неконтролируемых возмущений. Примером указанных объектов являются барабанные грануляторы цехов подготовки шихты металлургических предприятий.
Цель изобретения - повышение точности регулирования.
На чертеже представлена блок-схема системы регулирования (где U(t) - регулирующее воздействие в t-й момент времени; y(t) - выход объекта регулирования; (О (t) - неконтролируемое возмущение).
Система регулирования объекта с запаздыванием на входе и в состояниях содержит объект 1 регулирования , исполнительный блок 2, датчик 3, второй сумматор 4, пятый блок 5 задержки, вторую модель 6 прямого канала без запаздывания, третий блок 7 задержки, третий блок 8 вычитания, второй блок 9 задержки, вторую модель 10 рецикла без запаз дывания, второй экстраполятор 11, четвертый блок 12 вычитания, четвертый блок 13 задержки, первую модель 14 рецикла без запаздывания, третий сумматор 15, первый блок 16 задержки, второй блок 17 вычитания, первую модель 18 прямого канала без запаздывания, первый сумматор 19, первый экстраполятор 20,-регулирующий блок 21, первый блок 22 вычита-- ния, задатчик 23.
Модели 6,10, 14 и 18 прямого канала и рецикла без запаздывания пред- тавлены, например, в виде последовательного соединения инерционных звеньев. Регулирующий блок 21, в частности, с пропорционально-интегральным законом регулирования реализован в виде параллельного соединения интегратора и масштабирующего блока. Экстраполяторы 1I и 20 представлены реальными форсирующими звеньями. В качестве исполнительного
блока 2 может служить, например, весовой дозатор непрерывного дей ствия, а в качестве датчика 3 - весоизмеритель непрерывного действия .
Предлагаемая система работает следующим образом.
Регулирующее воздействие, вырабатываемое регулирующим блоком 21 в замкнутом через первую модель 18 прямого канала без запаздывания контуре, экстраполируется первым экстраполятором 20 на время (С - Из экстраполированного регулирую- ;Щвго воздействия исключается в четвертом блоке 12 вычитания прогноз эффекта рецикла. Этот прогноз состоит из преобразованной в первой модели 14 рецикла без запаздывания экстраполированной оценки неконтролируемого возмущения со (t) , получаемого на выходе второго экстра- полятора И, и эффекта регулирующего воздействия с выхода второй модели 6 прямого канала без учета запаздывания. Ощибка экстраполяции регулирующего воздействия пересчитывается в. первой модели 18 прямого канала без запаздывания в приращения выходной переменной объекта и алгебраически суммируется с ней в первом сумматоре 19.
Для реализации описанного алгоритма функционирования системы выхо y(t) объекта 1 регулирования измеряется датчиком 3 и полученный сигнал суммируется в первом сумматоре 19 .с выходным сигналом первой модели 18 прямого канала без запаздывания. Выходной сигнал первого суматора 19 о натурно-модельном входе вычитается в первом блоке 22 вычитания из сигнала задатчика 23 о заданном значении выхода и поступает на вход регулирующего блока 21, например, с пропорционально-интегральным законом регулирования. Выходной сигнал регулирующего блока 21 экстраполируется на время запаздывания на входе С,, объекта и в прямом канале о рециркуляционной части, т.е. наС ч-Гр, и идет на вхо четвертого блока 12 вычитания и на вход первого блока 16 задержки. Задержанный на время (С + Сд) в первом блоке 16 задержки сигнал вычитается во втором блоке 17 вычитания из выходного сигнала регулятора 21, и в
результате получается сигнал об ошибке экстраполяции регулирующего воздействия, который преобразуется первой моделью 18 прямого канала без запаздывания в сигнал корректировки выхода у(t).
Для оценив ания неконтролируемого возмущения О(t) сигнал с регулирующем воздействии U(t) преобразуется полной моделью объекта 1 регулирования, содержащей второй сумматор 4, пятый блок 5 задержки,
вторую модель 6 прямого канала без запаздывания, вторую модель 10 рецикла без запаздывания, второй блок 9 задержки и третий блок 7 задержки. В третьем блоке 7 задержки
моделируется запаздывание Г на входе объекта, в четвертом блоке 5 задержки - t , а во втором блоке 9 задержки - о,. Выходной сигнал третьего блока 7 задержки об
оценке y(t) без эффекта G3 (t) вычитается в третьем блоке 8 вычитания из сигнала датчика 3 о y(t), таким образом получается сигнал об оценке со (t). Этот сигнал экстрапо
лируется на время п вторым экстраполятором 11 и суммируется в третьем сумматоре 15 с выходным налом второй модели 6 прямого канала без запаздывания о прогнозируемом
на время о эффекте регулирующего воздействия U(t). Таким образом, на выходе третьего сумматора 15 получается сигнал .yCt+ c) о прогнозируемом на время о значении
выхода y(t) объекта 1 регулирования. Сигнал yCt+ C n) преобразуется в первой модели 14 рецикла без запаздывания, задерживается на время в четвертом блоке 13 за-
держки и вычитается в четв1ертом бло- :ке 12 вычитания из выходного сигна- 1ла первого экстраполятора. За счет этого исключается отрицательное влияние рецикла объекта. Выходной сигнал
четвертого блока 12 вычитания поступает на исполнительный блок 2, которым осуществляется изменение вещества или энергии, поступающей в объект 1 регулирования.
Для анализа системы регулирования объекта с запаздыванием на входе и в состояниях записываем сначала операторное выражение выходного сигнала третьего сумматора 15
У(р)эПР) У(Р)
)
1 -qj(p)e-P °. Cf (р)
гдЬ fj2 Р- передаточная функция У(р)(р).
(3)
второго экстраполятора.Тогда при условии адекватности
При условии эа(р1 -6 , .модели .объекту получаем операторное
получаемвыражение для выхода объекта
,(р) {Hf(p)l-f,, (р)е-Р( у(р)..JJ.
l + Cp(p)f(p) Ч ,(р) f,,(p)-f(p)
....,„.., . у (р ) ,
/ ч
у (р)
1+Ч о(Р(Р
где f(p), fg, (р) - передаточные функции соответствен- но регулирующего блока и первого экстраполятора;
задающий вход-
системы.
Из (4) видно, что характеристическое уравнение системы как по задающему входу, так и входу неконтролируемого возмущения
+ (о(р)(р)0 не содержит запаздывания, а значит,
можно увеличить коэффициент усиления регулирующего блока 2, что повышает точность регулирования. Если принять fg 1, то дня статического объекта переходные процессы заканчиваются при подаче ступенчатого возмущения по задающему входу за время ( с + с), а по входу неконтролируемого возмущё Ния - за 2 ( о„ + 0о), т.е. -переходные процессы заканчиваются через минимальное время и система является оптимальной в смысле минимизаций времени переходного процесса. Формул.а изобретения
Система регулирования для объектов с запаздыванием, содержащая за- датчик, первую модель прямого канала без запаздашания, первую модель рецикла без запаздывания, последовательно включенные исполнительный блок, объект регулирования, датчик, первый сумматор, первый блок вычитания, регулирующий блок, первый экст- раполятор, первый блок задержки и второй блок вычитания, последовательно включенные вторую модель рецикла
ро
7 ) (p), (2)
(3)
(4)
0
5
0
ц 5
0
5
без запаздывания, второй блок за- держки и второй сумматор, последова- тельно включенные третий блок задержки и третий блок вычитания, выход задатчика подключен к второму входу первого блока вычитания, выход регулирующего блока - к второму входу второго блока вычитания, выход первой модели прямого канала без запаздывания - к второму входу пер- вого сумматора, отличают ая- с я тем,что, с целью повышения точности регулирования, в нее введены второй экстраполятор, четвертый блок вычитания, четвертый блок задержки, последовательно включенные блок задержки, вторая модель прямого канала, без запаздывания и третий сумматор, выход которого через последовательно включенные первую модель рецикла без запаздывания и четвертый блок задержки подсоединен к первому входу четвертого блока вычита- йия, выход датчика через последовательно включенные третий блок вычитания и второй экстраполятор соединен с вторым входом третьего сумматора, выход ,.второй модели прямого канала без запаздывания подключен к входу третьего блока задержки и к входу второй модели рецикла без запаздывания, выход второго блока вычитания соединен .с входом первой модели прямого канала без запаздывания, выход первого экстраполятора через четвертый блок вычит;1ния подключен к второму входу сумматора и входу исполнительного блока, выход второго сумматора соединен с входом пятого блока задержки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2011 |
|
RU2457528C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Система управления | 1984 |
|
SU1244636A1 |
| Устройство для компенсации запаздываний | 1986 |
|
SU1409966A1 |
| Система управления | 1985 |
|
SU1285430A1 |
| Система регулирования объектов высокого порядка с запаздыванием | 1989 |
|
SU1667002A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2128358C1 |
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
Система регулирования объекта с запаздыванием на входе и в состояниях относится к области автоматического управления и регулирования. Цел-ь изобретения - повышение точности регулирования. Система регулирования содержит объект I регулирования, исполнительный блок 2, датчик 3, второй 4, третий 15 и первый 19 сумматоры, пятый 5, третий 7, второй 9, четвертый 13, первый 16 блоки задержки, вторуй 6 и первую 18 модели прямого канала без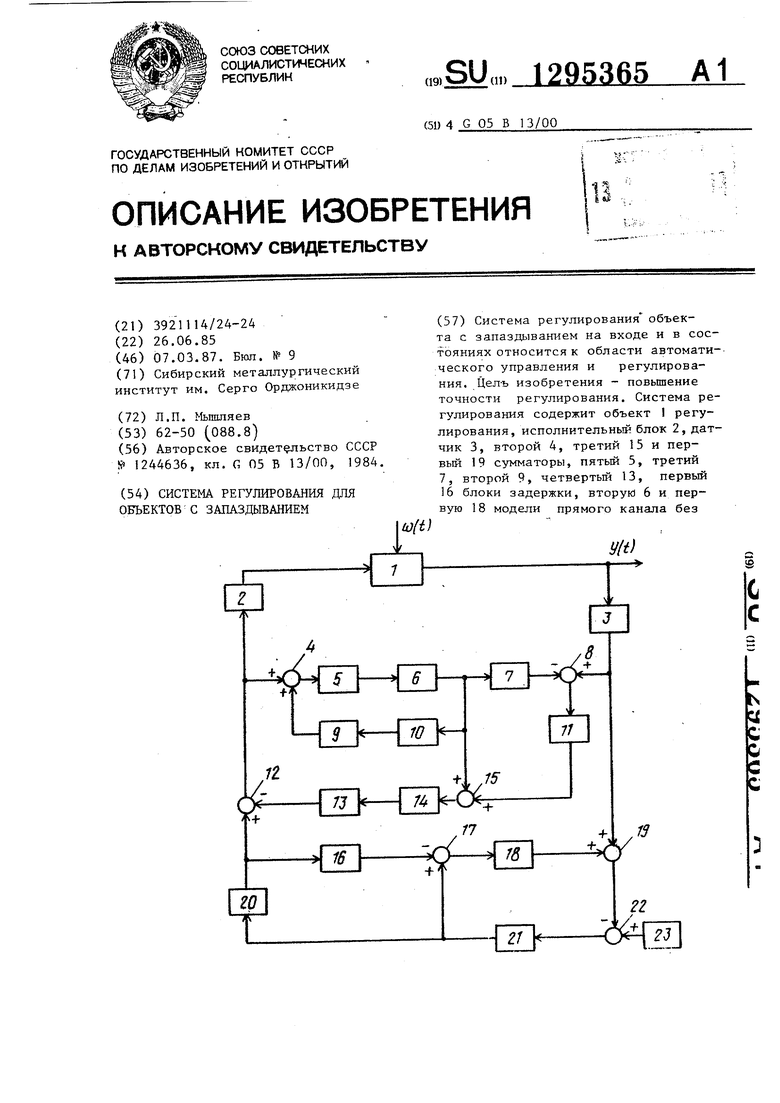
| Система управления | 1984 |
|
SU1244636A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
