Изобретение относится к электротехнике, в частности к регулируемым электроприводам переменного тока, и может использоваться для минимизации потерь электроэнергии при питании асинхронного электродвигателя от преобразователя частоты, а также регулирования момента и скорости асинхронных двигателей.
Известен электропривод переменного тока, содержащий трехфазный инвертор, силовые выходы которого через датчики фазного тока подключены к двум статорным обмоткам асинхронного электродвигателя, а управляющие входы инвертора через блок формирования управляющих импульсов и связанный с датчиками фазного тока импульсного регулятора тока соединены с выходами прямого преобразователя двухфазно-трехфазных координат, входы которого подключены к выходам прямого преобразователя декартовых координат, при этом ортофазный и синфазный выходы прямого преобразователя декартовых координат соединены с выходами соответственно регулятора ортофазного тока и регулятора синфазного тока, задающий вход регулятора ортофазного тока подключен к выходу адаптивного регулятора момента, вход задания момента которого соединен с выходом регулятора скорости, задающим входом подключенного к блоку задания скорости [1].
Недостатками этого технического решения являются сложность управляющего контроллера из-за наличия большого количества операций, связанных с координатными преобразованиями, требующими в каждом цикле работы определения мгновенных значений тригонометрических функций.
Наиболее близким к изобретению по технической сущности и достигаемому результату является электропривод переменного тока, содержащий адаптивный регулятор момента, который формирует вектор потокосцепления ротора путем формирования задания его мгновенных значений, амплитуда и частота которых зависит от задания на момент. Путем изменения частоты достигается формирование оптимального, с точки зрения минимизации, потребления тока статора, угла между векторами тока статора и потокосцепления ротора, равным 45°. Поддержание потокосцепления ротора осуществляется путем введения фазных регуляторов, выходы которых подключены к управляющим входам ШИМ-регулятора тока. Инвертором формируются фазные токи статора с частотой и амплитудой, необходимой для формирования заданного значения момента при условии минимизации потребления тока статора из сети и наиболее полного использования магнитопровода [2].
Недостатком данного устройства является сложность регулирования контролируемых координат векторов тока статора и потока ротора из-за наличия множественных преобразований координат, для расчета тригонометрических функций, не позволяет изменять момент двигателя в процессе разгона и, как следствие, повысить быстродействие системы.
Предлагаемый электропривод переменного тока содержит трехфазный инвертор, два силовых выхода которого через датчики фазного тока подключены к двум статорным обмоткам асинхронного двигателя, а третий силовой выход инвертора соединен с третьей обмоткой напрямую, управляющие входы инвертора соединены с выходами блока ШИМ-регулятора тока, датчик скорости, установленный на валу асинхронного двигателя, выход которого соединен с отрицательным входом блока сравнения, положительный вход которого подключен к блоку задания скорости, а выход блока сравнения подключен ко входу пропорционально-интегрального регулятора скорости, выход которого соединен с одним входом блока задания модуля регулируемого параметра, выход которого подключен к первому входу блока формирования задания мгновенных значений регулируемого параметра, имеющего три фазных выхода, каждый из которых соединен с положительным входом одного из трех фазных блоков сравнения регулируемого параметра, отрицательные входы которых соединены с фазными блоками расчета регулируемого параметра, а выходы трех фазных блоков сравнения регулируемого параметра соединены с входами регуляторов регулируемого параметра двигателя, выходы которых поступают на три первых входа блока ШИМ-регулятора тока, шесть выходов которого соединены с шестью управляющими входами трехфазного инвертора, входы двух датчиков фазного тока соединены с входом сумматора токов, а также соединены с двумя входами блока ШИМ-регулятора тока, а также соединены со входами двух фазных блоков расчета регулируемого параметра двигателя, выход сумматора токов соединен с входом третьего фазного блока расчета регулируемого параметра двигателя и входом ШИМ-регулятора тока, первый вход блока расчета скольжения соединен с выходом блока формирования частоты вращения магнитного потока, который производит вычисление в соответствии с формулой ω1=рn·ω2+Δω, где ω1 - частота вращения магнитного потока; рn - число пар полюсов асинхронного двигателя; ω2 - скорость вращения ротора, поступающая с датчика скорости, выход датчика скорости подключен ко второму входу блока расчета скольжения, выход которого соединен с входом блока расчета постоянной времени интегрирования, выход которого соединен с тремя блоками регуляторов регулируемого параметра двигателя и тремя фазными блоками расчета регулируемого параметра двигателя отличающийся тем, что выход блока сравнения скорости двигателя подключен к блоку компаратора, выход которого соединен со вторым входом блока задания модуля регулируемого параметра, а регулируемым параметром является ток намагничивания двигателя, выход регулятора скорости также подключен к одному входу блока коррекции, выход которого соединен с третьим входом блока задания модуля регулируемого параметра, блок расчета угла между векторами тока статора и тока намагничивания соединен с выходами двух датчиков фазного тока статора и с выходом сумматора тока статора, а также с выходами трех блоков расчета регулируемого параметра, выход блока расчета угла между векторами тока статора и тока намагничивания соединен с отрицательным входом блока сравнения угла между векторами тока статора и тока намагничивания, положительный вход которого соединен с блоком задания этого угла, а выход данного блока сравнения соединен со вторым входом блока коррекции, выход блока задания скорости двигателя соединен с первым входом блока ограничения частоты вращения магнитного потока, выход блока задания разности частот вращения магнитного потока статора и ротора двигателя соединен со вторым входом блока ограничения частоты вращения магнитного потока, выход блока задания разности частот вращения магнитного потока статора и ротора двигателя соединен со вторым входом блока ограничения частоты вращения магнитного потока, на который также поступает задание на частоту вращения магнитного потока с блока формирования частоты вращения магнитного потока.
В данном электроприводе переменного тока заданное значение электромагнитного момента обеспечивается при минимальных значения тока статора, что достигается путем поддержания постоянного угла между векторами тока статора и током намагничивания, равного 45°.
На фиг.1 приведена функциональная схема электропривода переменного тока; на фиг.2 показан алгоритм работы блока коррекции 15; на фиг.3 показан алгоритм работы блока 29 вычисления угла между векторам тока статора и тока намагничивания; на фиг.4 показана осциллограмма фазных значений тока статора Is и тока намагничивания Im; на фиг.5 показана экспериментально полученная характеристика зависимости тока статора от угла между векторами тока статора и тока намагничивания, построенная в относительных единицах.
Электропривод переменного тока содержит инвертор 1, два силовых выхода которого соединены через датчики тока 2 и 3 с двумя обмотками статора асинхронного двигателя 4, а третий выход инвертора 1 соединен с третьей обмоткой статора двигателя 4 напрямую. На валу двигателя 4 установлен датчик скорости 5. Управляющие входы инвертора 1 соединены с выходами блока широтно-импульсной модуляции ШИМ-регулятора тока 6. Выходы датчиков тока 2, 3 соединены с входами сумматора тока 7. Выходы датчиков тока 2, 3 наряду с выходом сумматора тока 7 поступают на блок ШИМ-регулятора тока 6. Выход датчика скорости 5 соединен с отрицательным входом блока сравнения скорости 8, положительный вход которого подключен к блоку задания скорости 9. Выход блока задания 9 подключен к блоку ограничения частоты вращения магнитного потока 10, выход, которого поступает на формирователь задания мгновенных значений тока намагничивания 11. Выход блока сравнения подключен к блоку компаратора 12, выход которого соединен с блоком задания модуля тока намагничивания 13, и к пропорционально-интегральному регулятору скорости 14, содержащему блок ограничения. Выход пропорционально-интегрального регулятора 14, соединенного с входом блока коррекции 15, на второй вход которого поступает сигнал с блока сравнения между заданным и рассчитанным углом вектора тока статора и тока намагничивания 16. Выход блока коррекции 15 соединен с входом блока задания модуля тока намагничивания 13, выход которого соединен с блоком формирования задания мгновенных значений тока намагничивания 11. Три фазных выхода блока 11 соединяются с положительными входами одного из трех фазных блоков сравнения тока намагничивания 17, 18, 19, отрицательные входы этих блоков соединены с фазными блоками расчета тока намагничивания 20, 21, 22. Выходы трех фазных блоков сравнения тока намагничивания 17, 18, 19 соединены с входами регуляторов тока намагничивания двигателя 23, 24, 25, выходы которых поступают на три первые входа блока ШИМ-регулятора тока 6, шесть выходов которого соединены с шестью управляющими входами трехфазного инвертора 1. Выходы датчиков тока 2, 3 соединены с входами двух фазных блоков расчета тока намагничивания двигателя 20, 22 и с выходом сумматора токов 7, который соединен с входом фазного блока расчета тока намагничивания 21. Выход датчика скорости 5 соединен с первым блоком расчета скольжения 26, второй вход которого соединен с выходом блока формирования частоты вращения магнитного потока 27. Выход блока расчета скольжения 26 соединен с входом блока расчета постоянной времени интегрирования 28, выход которого соединяются с тремя блоками регуляторов тока намагничивания двигателя (23, 24, 25) и тремя фазными блоками расчета тока намагничивания (20, 21, 22). Блок расчета угла между векторами тока намагничивания и тока статора 29 соединен с тремя выходами фазных блоков расчета тока намагничивания (20, 21, 22) и с тремя выходами мгновенных значений токов статора двигателя, соединенных с датчиками фазы тока статора 2, 3 и с входом сумматора токов 7. Отрицательный вход блока сравнения угла между векторами тока статора и тока намагничивания 16 соединен с выходом блока расчета угла между вектором тока статора и тока намагничивания 29, положительный вход блока сравнения 16 соединен с блоком 30 задание угла 45°, блок задания разности частот вращения поля статора и ротора двигателя 31 соединен с блоком формирования частоты вращения магнитного потока 27.
Электропривод переменного тока работает следующим образом.
Инвертор 1 через датчики 2,3 фазных токов питает статорные обмотки асинхронного двигателя 4 широтно-модулируемыми пульсациями силового напряжения, длительность которых определяется управляющими пульсациями, поступающими с выхода ШИМ-регулятора тока 6. Формирование задания на блок ШИМ-регулятора тока 6 происходит следующим образом. Сигнал задания на скорость ω*2, поступающий с блока задания скорости 9, и сигнал Δω, идущий от блока 31 задания разности частот вращения поля статора и ротора, поступают на блок ограничения частоты вращения магнитного потока 10, на который также поступает с блока формирования частоты вращения магнитного потока 27 задание на ω1 частоты вращения магнитного потока, в результате на выходе блока ограничения частоты вращения магнитного потока 10 формируется частота вращения магнитного потока ω*1, которая соответствует условию:
ω*1≤ω*2+Δω. Сигнал задания на скорость ω*2, поступающий с блока задания скорости 9, сравнивается с сигналом текущей скорости вращения ротора ω2, поступающего с датчика скорости 5, формируемая таким образом разница Δω2 между заданным и измеренным значениями скорости ротора поступает на вход блока компаратора 12, сигнал с выхода которого поступает на блок задания модуля тока намагничивания 13, на который также поступает сигнал от пропорционально - интегрального регулятора скорости 14, и от блока коррекции тока намагничивания 15. На выходе блока 13 формируется задание мгновенных значений тока намагничивания, поступающее на блок 11. На второй вход блока 15 поступает сигнал с блока 16 сравнения заданного угла между векторами тока статора и тока намагничивания с рассчитанным, поступающим с блока расчета 29. При разгоне двигателя, когда сигнал Δω2 не равен 0, сигнал с блока сравнения 8 поступает на пропорционально-интегральный регулятор скорости 14 и на вход компаратора 12, который дает задание на включение первого канала задания модуля тока намагничивания 13. В статическом режиме при достижении заданной скорости, когда Δω2 равно 0, сигнал с блока сравнения 8 поступает на пропорционально-интегральный регулятор скорости 14, который формирует задание на ток намагничивания и выход которого соединяется с первым входом блока коррекции 15, выход которого соединяется со вторым входом блока задания модуля тока намагничивания 13, переключение которого осуществляется сигналом с выхода блока компаратора 12.
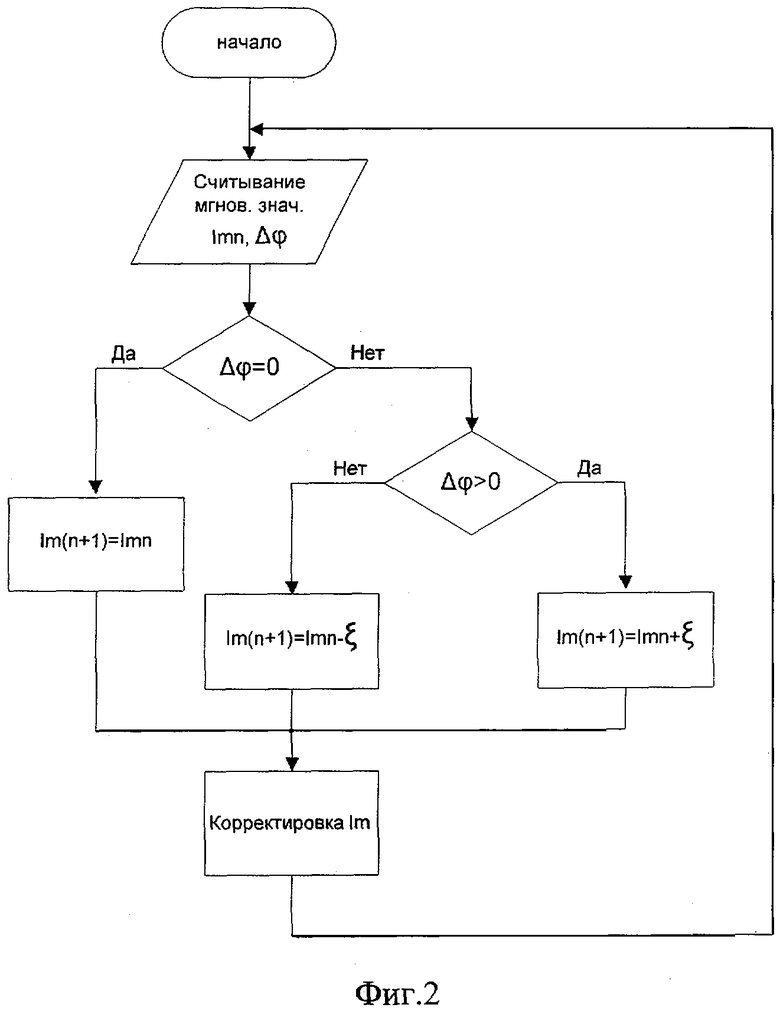
Работа блока коррекции 15, представленная алгоритмом на фиг.2, происходит исходя из задания на ток намагничивания и условия, что угол между векторами тока статора и тока намагничивания должен быть равным 45° и при этом формирует оптимальное задание на ток намагничивания для действующего статического момента по минимуму потребления тока статора.
Выбор значения угла в 45° осуществлен исходя из условия минимизации потребления тока статора векторным электроприводом при формировании момента по формуле:

где Lm - взаимная индуктивность фаз, φ0 - угол между вектором тока статора и тока намагничивания, pn - число пар полюсов асинхронного электродвигателя.
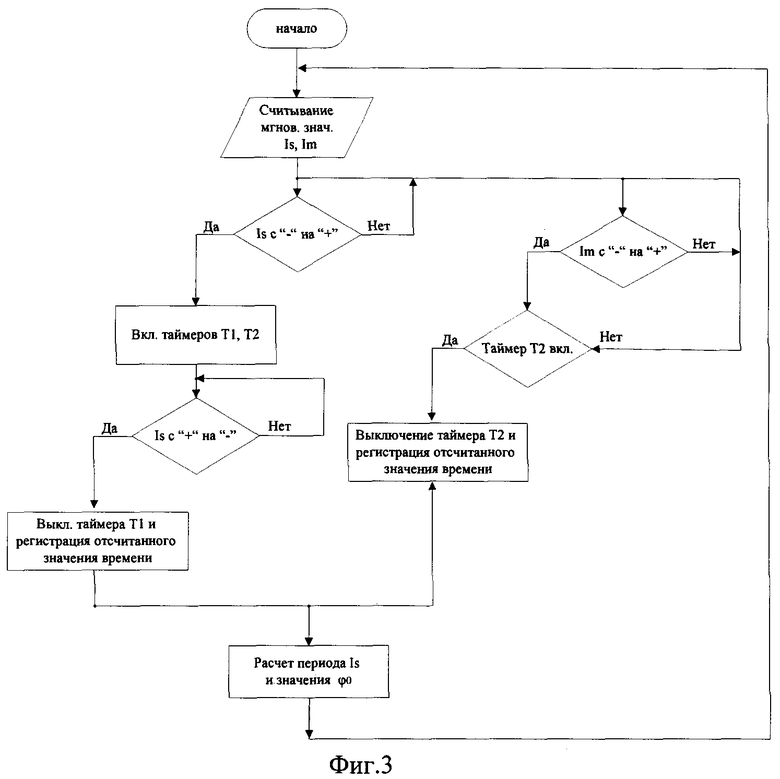
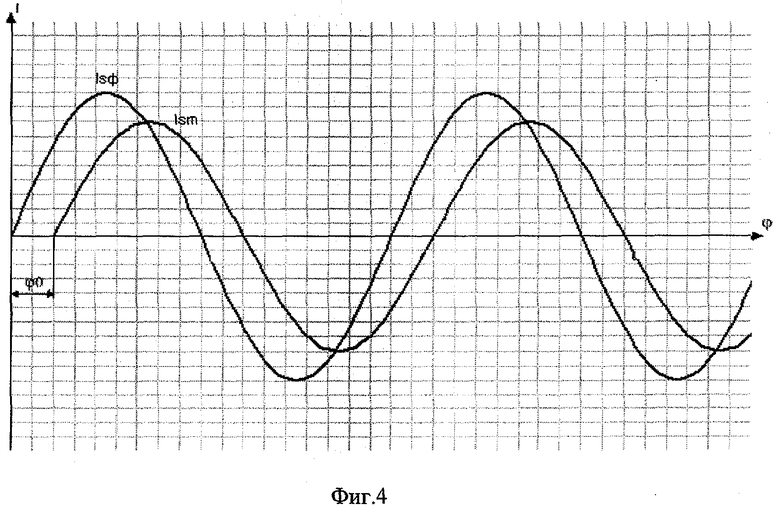
Блок косвенного вычисления угла между вектором тока статора и током намагничивания 29 (см. фиг.1) работает в соответствии с алгоритмом, показанным на фиг.3. На фиг.4 приведены временные графики тока статора и тока намагничивания, поясняющие работу блока 29. На вход блока 29 поступают фазные значения тока статора Is и тока намагничивания Im. В начале (см. фиг.3, фиг.4) происходит фиксирование момента перехода тока статора Is через нулевое значение, т.е с отрицательного значения на положительное, при этом запускаются таймеры T1, T2. При переходе тока намагничивания Im через нулевое значение (с отрицательного значения на положительное) останавливается таймер T2 и фиксируется отсчитанное значение времени. Затем происходит фиксирование перехода тока статора Is через нулевое значение (с положительного на отрицательное) и останавливается таймер T1 при этом запоминается отсчитанное значение времени. Используя значения времени система, рассчитывает угол сдвига φ0, используя следующее соотношение:
Расчет угла φ0 происходит циклически с последующей передачей в систему.
Блок 27 формирования частоты вращения магнитного потока ω1 проводит вычисления в соответствии с формулой:

где  - разность частот вращения поля статора и ротора двигателя, задаваемая блоком 31.
- разность частот вращения поля статора и ротора двигателя, задаваемая блоком 31.
Блок расчета скольжения 26 рассчитывает относительное скольжение s по формуле:
Сформированная таким образом частота ω* 1, а также сигнал задания на модуль тока намагничивания  поступают на вход блока задания мгновенных значений тока намагничивания 11, реализующего формулу:
поступают на вход блока задания мгновенных значений тока намагничивания 11, реализующего формулу:

Сформированные таким образом задания на фазные токи намагничивания поступают на входы фазных блоков сравнения тока намагничивания 17, 18, 19 соответственно. В этих блоках происходит сравнение заданных мгновенных значений токов намагничивания (I* ma, I* mb, I* mc) с рассчитанными в фазных блоках расчета тока намагничивания 20, 21, 22. Представленный электропривод работает в естественной трехфазной системе координат, что избавляет от необходимости применять двухфазно-трехфазный преобразователь координат. Мгновенные фазные значения тока намагничивания вычисляются в блоках 20, 21, 22 из реальных значений тока статора по передаточной функции Лапласа, каждая из которых имеет передаточную функцию:
где Im(р), Is (p) - операторное изображение тока намагничивания и тока фазы статора, р - оператор Лапласа, Lm - взаимная индуктивность фазы АД.
Мгновенное значение тока намагничивания не прямо пропорционально току статора, а изменяется по апериодическому закону, постоянная времени которого является функцией скольжения (4), рассчитываемая в блоке 26. Регуляторы тока намагничивания двигателя 23, 24, 25 имеют передаточную функцию:
где Тф - постоянная времени фильтра Баттерворса принимается равной по величине обратно пропорциональной частоте операций сравнения ШИМ-регулятора тока 6. На выходе регуляторов тока формируется задание на мгновенные фазные токи статора (I* 1a, I* 1b, I* 1c), которые наряду с действительными значениями (I1a, I1b, I1c) поступают на вход импульсного регулятора тока. Сигнал мгновенного фазного тока I1b рассчитывается на сумматоре 7 через мгновенные фазные значения токов (I1a, I1c), поступающих с датчиков тока 2, 3.
На фиг.2 показана блок-схема алгоритма, которая строится следующим образом: на вход блока 15 поступает задание на ток намагничивания Im и разность углов между заданным вектором тока статора и тока намагничивания и рассчитанным Δφ. Если Δφ<0, то происходит уменьшение тока задания намагничивания с периодом шага дискретизации ξ=0.0005, пока угол φ0 не станет равным 45°, если Δφ>0, то происходит увеличение тока задания намагничивания с периодом шага дискретизации ξ=0.0005, если Δφ=0, то значение задание на ток намагничивания не изменяется. Считывание мгновенных значений угла происходит циклически с дискретностью, определяемой быстродействием системы.
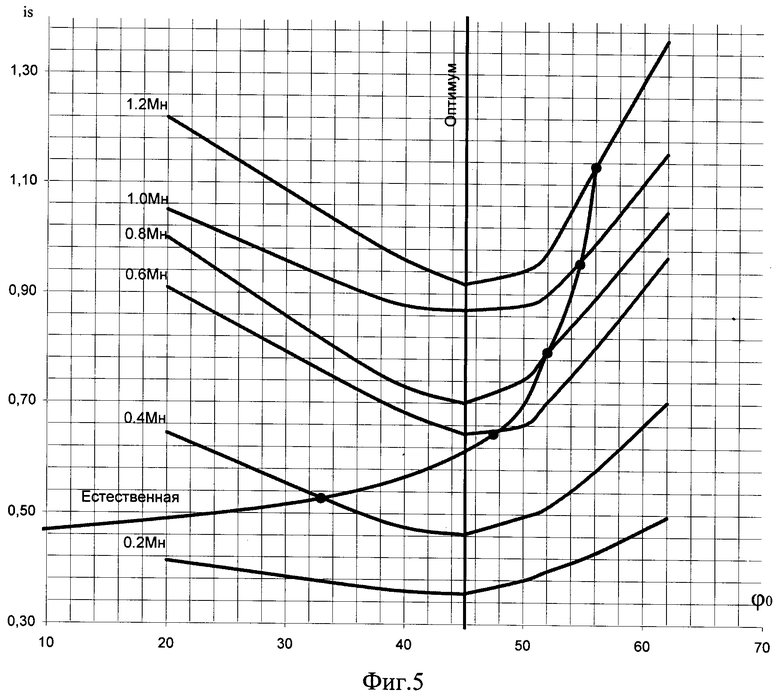
На фиг.5 показана экспериментально полученная характеристика зависимости тока статора от угла между векторами тока статора и тока намагничивания, построенная в относительных единицах. Из графика фиг.5 (линия 1) зависимости видно, как меняется угол между векторами тока статора и тока намагничивания при работе на естественной характеристике при увеличении нагрузки на валу асинхронного двигателя. Как показывает график, при номинальной нагрузке достигается уменьшение тока статора на 10% по отношению к приводу, работающему напрямую от сети.
Преимущество предлагаемого электропривода переменного тока заключается:
- в работе с реальной трехфазной системой координат, что избавляет от многочисленных преобразований;
- в учете динамики изменения фазных значений тока намагничивания в зависимости от изменения фазных значений тока статора, что повышает точность и скорость протекающих процессов.
Источник информации
1. Патент РФ №1515322, кл. Н02Р 7/42. Электропривод переменного тока. Мищенко В.А. Приоритет 11.05.1984. Опубл.15.10.89. Бюл. №38.
2. Патент РФ №2254666, кл. Н02Р 7/42. Электропривод переменного тока. Левин П.Н., Мещеряков В.Н. Приоритет 26.01.2004. Опубл. 20.06.2005. Бюл. №17.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2447573C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2528612C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2582202C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Способ активного гашения магнитного шума электродвигателя и устройство для его осуществления | 2021 |
|
RU2769972C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
Изобретение относится к области электротехнике и может быть использовано для минимизации потерь электроэнергии электропривода переменного тока от преобразователя частоты. Технический результат заключается в повышении энергетических и динамических показателей. В электропривод переменного тока введен адаптивный регулятор коррекции тока намагничивания, который формирует вектор тока намагничивания путем формирования мгновенных значений, амплитуда и частота которых зависят от задания на ток намагничивания. Путем изменения частоты достигается формирование оптимального с точки зрения минимизации потребления тока статора, угла между векторами тока статора и тока намагничивания, равного 45°. Поддержание тока намагничивания осуществляется путем введения фазных регуляторов, выходы которых подключены к управляющим входам ШИМ - регулятора тока. Инвертором формируются фазные токи статора с частотой и амплитудой, необходимой для формирования заданного значения момента при условии минимизации потребления тока статора из сети и наиболее полного использования магнитопровода. Электропривод работает с реальной трехфазной системой координат, что позволит исключить всевозможные преобразователи координат, усложняющие расчет и увеличивающие требования к управляющему контроллеру. 5 ил.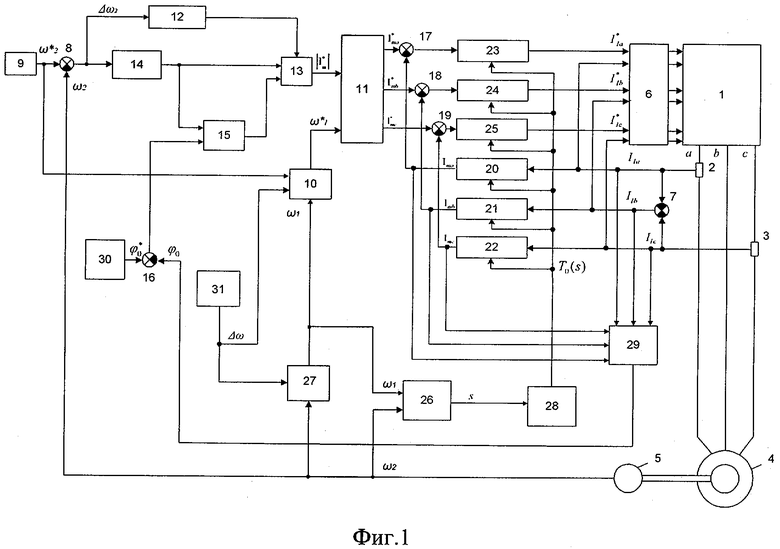
Электропривод переменного тока, содержащий трехфазный инвертор, два силовых выхода которого через датчики фазного тока подключены к двум статорным обмоткам асинхронного двигателя, а третий силовой выход инвертора соединен с третьей обмоткой напрямую, управляющие входы инвертора соединены с выходами блока ШИМ - регулятора тока, датчик скорости, установленный на валу асинхронного двигателя, выход которого соединен с отрицательным входом блока сравнения, положительный вход которого подключен к блоку задания скорости, а выход блока сравнения подключен ко входу пропорционально-интегрального регулятора скорости, выход которого соединен с одним входом блока задания модуля регулируемого параметра, выход которого подключен к первому входу блока формирования задания мгновенных значений регулируемого параметра, имеющего три фазных выхода, каждый из которых соединен с положительным входом одного из трех фазных блоков сравнения регулируемого параметра, отрицательные входы которых соединены с фазными блоками расчета регулируемого параметра, а выходы трех фазных блоков сравнения регулируемого параметра соединены с входами регуляторов регулируемого параметра двигателя, выходы которых поступают на три первых входа блока ШИМ - регулятора тока, шесть выходов которого соединены с шестью управляющими входами трехфазного инвертора, входы двух датчиков фазного тока соединены с входом сумматора токов, а также соединены с двумя входами блока ШИМ - регулятора тока, а также соединены со входами двух фазных блоков расчета регулируемого параметра двигателя, выход сумматора токов соединен с входом третьего фазного блока расчета регулируемого параметра двигателя и входом ШИМ - регулятора тока, первый вход блока расчета скольжения соединен с выходом блока формирования частоты вращения магнитного потока, который производит вычисление в соответствии с формулой ω1=рn·ω2+Δω, где ω1 - частота вращения магнитного потока; pn - число пар полюсов асинхронного двигателя; ω2 - скорость вращения, поступающая с датчика скорости, выход датчика скорости подключен ко второму входу блока расчета скольжения, выход которого соединен с входом блока расчета постоянной времени интегрирования, выход которого соединен с тремя блоками регуляторов регулируемого параметра двигателя и тремя фазными блоками расчета регулируемого параметра двигателя, отличающийся тем, что выход блока сравнения скорости двигателя подключен к блоку компаратора, выход которого соединен со вторым входом блока задания модуля регулируемого параметра, выход регулятора скорости также подключен к одному входу блока коррекции, выход которого соединен с третьим входом блока задания модуля регулируемого параметра, блок расчета угла между векторами тока статора и тока намагничивания соединен с выходами двух датчиков фазного тока статора и с выходом сумматора тока статора, а также с выходами трех блоков расчета регулируемого параметра, выход блока расчета угла между векторами тока статора и тока намагничивания соединен с отрицательным входом блока сравнения угла между векторами тока статора и тока намагничивания, положительный вход которого соединен с блоком задания этого угла, а выход данного блока сравнения соединен со вторым входом блока коррекции, выход блока задания скорости двигателя соединен с первым входом блока ограничения частоты вращения магнитного потока, выход блока задания разности частот вращения магнитного потока статора и ротора двигателя соединен со вторым входом блока ограничения частоты вращения магнитного потока, вход блока задания разности частот вращения магнитного потока статора и ротора двигателя соединен с вторым входом блока ограничения частоты вращения магнитного потока, на который также поступает задание на частоту вращения магнитного потока с блока формирования частоты вращения магнитного потока.
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| RU 2132110 C1, 20.06.1999 | |||
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| СПОСОБ ЛЕЧЕНИЯ ВОЛЧАНКИ | 2005 |
|
RU2396980C2 |
| US 2005174088 A1, 11.08.2005 | |||
| JP 2006311770 A, 09.11.2006 | |||
| Кожух к полировочным и т.п. кругам | 1926 |
|
SU10981A1 |
| WO 99842070 A1, 24.09.1998. | |||

