Изобретение относится к дистанционным способам обнаружения звукорассеивающих слоев (ЗРС) в морях и океанах по данным полосовой съемки рельефа дна интерферометрическим гидролокатором бокового обзора (ИГБО) и может быть использовано в исследованиях акустических характеристик водной толщи мирового океана при геофизических изысканиях.
Существует способ обнаружения ЗРС с помощью прибора, погружаемого в воду на тросе. Мозговой В.А. «Изменчивость характеристик океанических звукорассеивающих слоев» // «Акустический Журнал», 1987, Т. 33, №6, С. 1101-1104. Антенны излучателя и приемника, закрепленные на одной платформе, погружаются в воду на тросе. Излучатель излучает импульсный тональный сигнал на различных частота. По принятому приемником сигналу вычисляется коэффициент обратного рассеяния и мощность ЗРС. Способ позволяет исследовать не только амплитудные, но и спектральные характеристики ЗРС. Недостатком способа является невозможность проведения измерений при движении судна и большие затраты времени при измерениях в одной точке.
Существует прибор акустический доплеровский профилометр течений (ADCP), измеряющий одновременно как профили скорости течений, так и профили интенсивности эхосигнала отраженного от неоднородностей морской среды. Морозов А. Н. и др. «Звукорассеивающие слои Черного моря по данным ADCP - наблюдений» // «Акустический журнал», 2017, Т. 63, №5, С. 513-522. Прибор излучает широкополосный импульсный акустический сигнал и принимает отраженный от неоднородностей морской среды сигнал на несколько антенн направленных в разные стороны. По принятому приемником сигналу вычисляется коэффициент обратного рассеяния и мощность ЗРС в различных направлениях. Число антенн от 3 до 8. Такой прибор может погружаться на тросе, устанавливаться на борт судна и на дно моря. Достоинством прибора является то, что его можно использовать при движении судна и используется несколько приемников, что позволяет исследовать ЗРС в разных точках. Недостатком прибора является узкий захват площади исследуемого ЗРС за один период цикла излучение - прием.
Технический результат, который может быть получен при осуществлении изобретения, заключается в существенном увеличении площади исследуемых ЗРС, что позволяет уменьшить время проведения измерения и энергопотребление.
Технический результат достигается тем, что в способе обнаружения звукорассеивающих слоев в морях и океанах, включающем зондирование широкополосным акустическим импульсным сигналом акустических рассеивателей в тоще воды, прием отраженных от звукорассеивающих слоев сигналов осуществляют на антенны интерферометрического гидролокатора бокового обзора, сравнивают распределение по времени разности фаз в антеннах интерферометрического гидролокатора бокового обзора с моделью распределения по времени разности фаз для различных глубин, по максимуму корреляционной функции распределения по времени разности фаз в антеннах интерферометрического гидролокатора бокового обзора и модели распределения по времени разности фаз, определяют моменты времени появления звукорассеивающих слоев и вычисляют их глубину.
В предлагаемом способе обнаружения ЗРС в воде производится зондирование широкополосным акустическим сигналом, например импульсным сигналом с линейной частотной модуляцией, акустических рассеивателей в вертикальном столбе воды и прием отраженных от ЗРС сигналов на антенны ИГБО (две антенны). При этом антенны ИГБО установлены на движущееся судно.
Интерферометрическую разность фаз сигналов принятых антеннами ИГБО, рассеянных плоской горизонтальной отражающей поверхности для данных, соответствующих одному циклу излучения и приема сигнала, можно записать в следующем виде:

где:
Здесь Hn -расстояние до слоя n, c - скорость звука, t - время прихода эхосигнала, d - расстояние между приемными антеннами интерферометра, λ - длина волны.
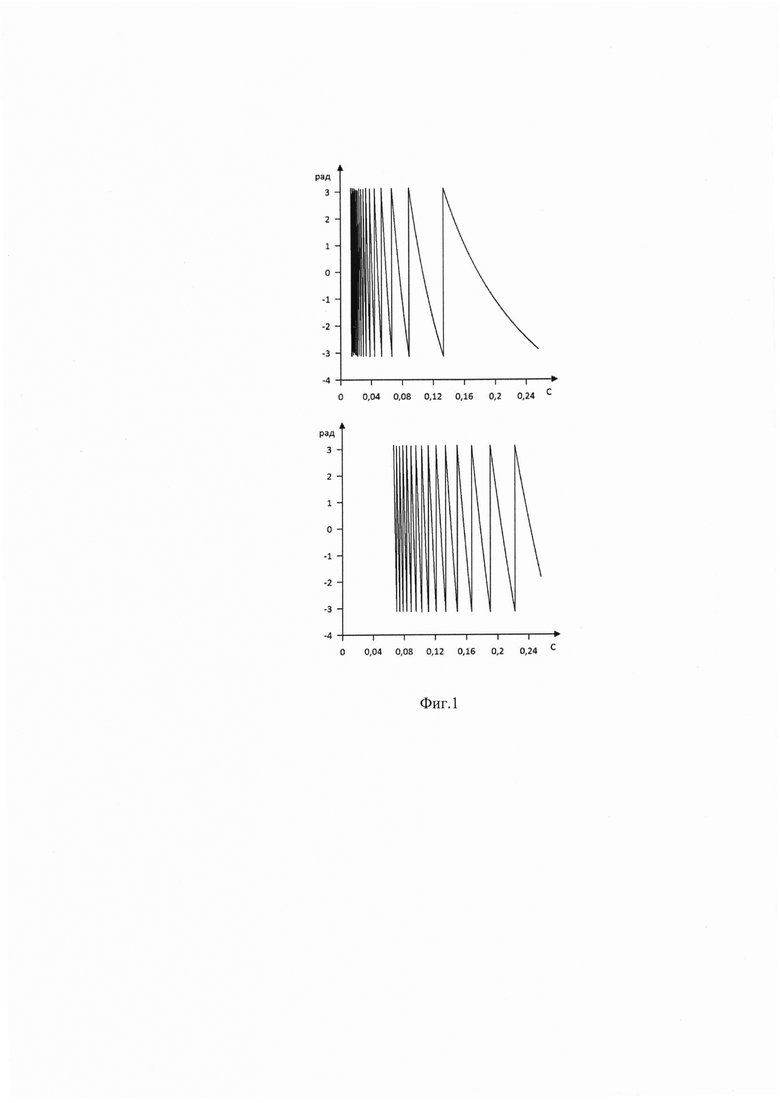
На фиг. 1, в качестве примера, приведены графики интерферометрической разности фаз, рассчитанные в зависимости от времени прихода эхосигналов от рассеивающих элементов горизонтальной поверхности при вертикальной ориентации базы интерферометра (модель). Графики построены для двух звукорассеивающих слоев на глубинах H1=20 м (верхний) и Н2=100 м (нижний).
Если рассматривать интерферометрическую фазу ϕ(t), как сигнал, зависящий от глубины Н, как от параметра, то корреляционная функция (КФ) сигнала ϕn(t) при определенном Hn и моделей ϕ(t), по всем глубинам может быть записана в следующем виде:

где Т- время приема отраженного сигнала ИГБО.
Для заданного значения Hn нормированная КФ является функцией, зависящей только от глубины H:
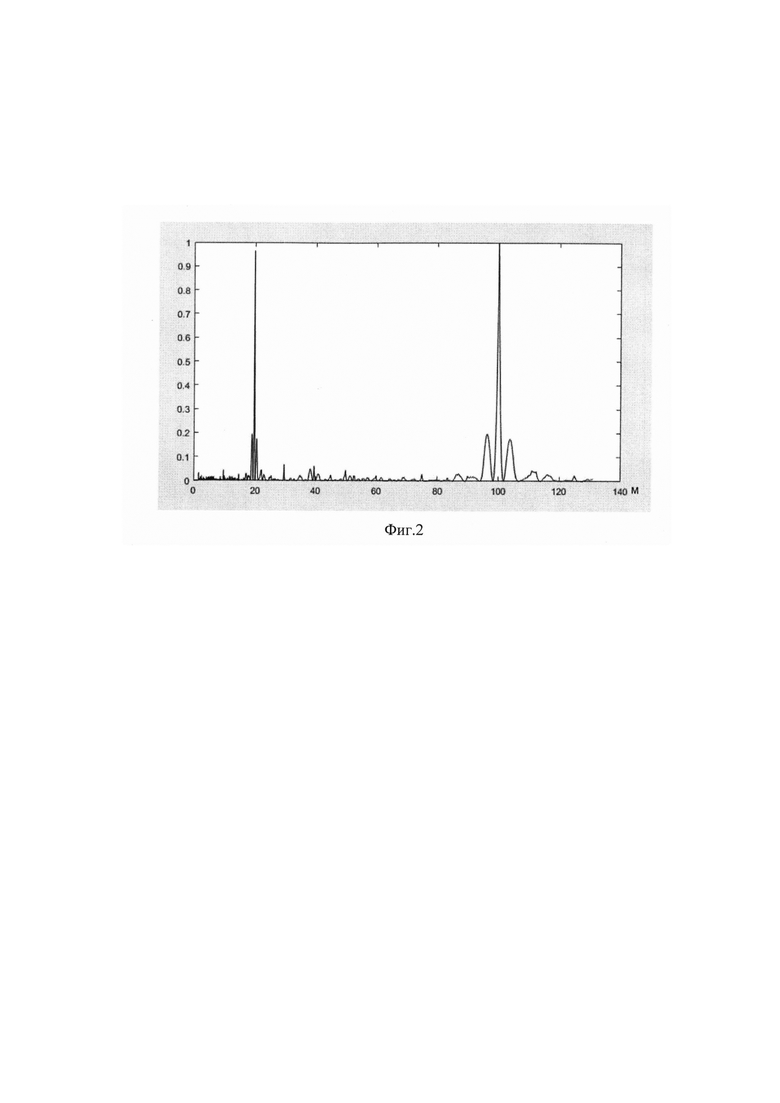
На фиг. 2 представлен модуль этой функции при наличии двух звукорассеивающих слоев на глубинах 20 м и 100 м соответственно.
Вычисляя КФ модели с разностью фаз принятого ИГБО сигнала с выбранным шагом по глубине, можно обнаружить ЗРС с высокой точностью. Положение по глубине обнаруженного ЗРС определяется максимумом КФ.
Способ обнаружения звукорассеивающих слоев в морях и океанах осуществляется следующим образом. На движущемся судне установлен ИГБО по две антенны с каждого борта (одна приемопередающая и одна приемная). Приемопередающая антенна излучает широкополосный акустический сигнал. Сигнал отраженный от ЗРС принимается на приемную и приемопередающую антенну и вычисляется разность фаз отраженного от ЗРС сигналов. Вычисляются модели разности фаз для различных глубин (фиг. 1). Для всех вычисленных моделей вычисляется КФ с разностью фаз принятого сигнала ИГБО. При наличии ЗРС на определенной глубине появятся максимумы КФ (фиг. 2). Та модель разности фаз для которой есть максимум определяет глубину залегания ЗРС. Точность измерения глубины залегания ЗРС зависит от мощности отражения сигнала от ЗРС и шага по глубине с которым вычисляются модели разности фаз сигналов отраженных от слоев.
В предложенном способе обнаружения ЗРС в воде используется площадной метод исследования водной толщи в отличии от метода прототипа, где используется линейный способ, что уменьшает время проведения исследований и энергопотребление реализации данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения распределения скорости звука | 2020 |
|
RU2736231C1 |
| СПОСОБ ГИДРОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЯ В ВОДОЕМЕ С СУДНА | 1991 |
|
RU2010232C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2014 |
|
RU2572666C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ДЛЯ ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2011 |
|
RU2461845C1 |
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2271551C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2004 |
|
RU2280266C2 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2012 |
|
RU2515125C1 |
Использование: изобретение относится к дистанционным способам обнаружения звукорассеивающих слоев в морях и океанах по данным полосовой съемки рельефа дна интерферометрическим гидролокатором бокового обзора и может быть использовано в исследованиях акустических характеристик водной толщи мирового океана при геофизических изысканиях. Сущность: способ обнаружения звукорассеивающих слоев в морях и океанах включает зондирование широкополосным акустическим импульсным сигналом акустических рассеивателей в тоще воды, прием отраженных от звукорассеивающих слоев сигналов на антенны интерферометрического гидролокатора бокового обзора. Далее сравнивают распределение по времени разности фаз в антеннах интерферометрического гидролокатора бокового обзора с моделью распределения по времени разности фаз для различных глубин, по максимуму корреляционной функции распределения по времени разности фаз в антеннах интерферометрического гидролокатора бокового обзора и модели распределения по времени разности фаз, определяют моменты времени появления звукорассеивающих слоев и вычисляют их глубину. Технический результат: увеличение площади исследуемых ЗРС, что позволяет уменьшить время проведения измерения и энергопотребление. 2 ил.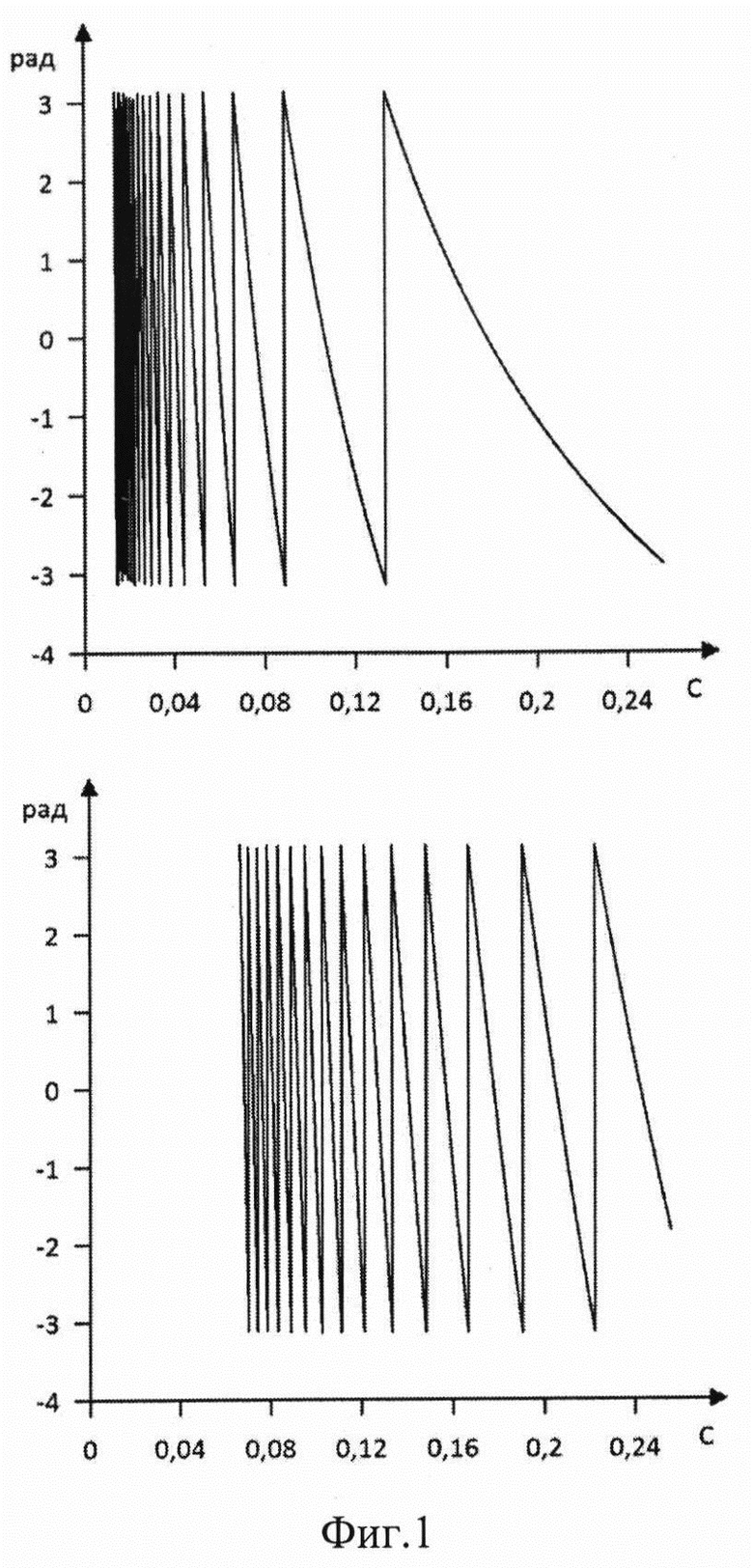
Способ обнаружения звукорассеивающих слоев в морях и океанах, заключающийся в зондировании широкополосным акустическим импульсным сигналом акустических рассеивателей в тоще воды, отличающийся тем, что прием отраженных от звукорассеивающих слоев сигналов осуществляют на антенны интерферометрического гидролокатора бокового обзора, сравнивают распределение по времени разности фаз в антеннах интерферометрического гидролокатора бокового обзора с моделью распределения по времени разности фаз для различных глубин, по максимуму корреляционной функции распределения по времени разности фаз в антеннах интерферометрического гидролокатора бокового обзора и модели распределения по времени разности фаз, определяют моменты времени появления звукорассеивающих слоев и вычисляют их глубину.
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2011 |
|
RU2460088C1 |
| Способ определения параметров цели гидролокатором | 2017 |
|
RU2650835C1 |
| 0 |
|
SU153282A1 | |
| Способ определения распределения скорости звука | 2020 |
|
RU2736231C1 |
| Способ обнаружения локального объекта на фоне распределенной помехи при бистатической гидролокации | 2019 |
|
RU2736567C1 |
| Переносный рычажный пресс для выпрямления путевых костылей | 1928 |
|
SU14167A1 |
| CN 202093165 U, 28.12.2011. | |||
