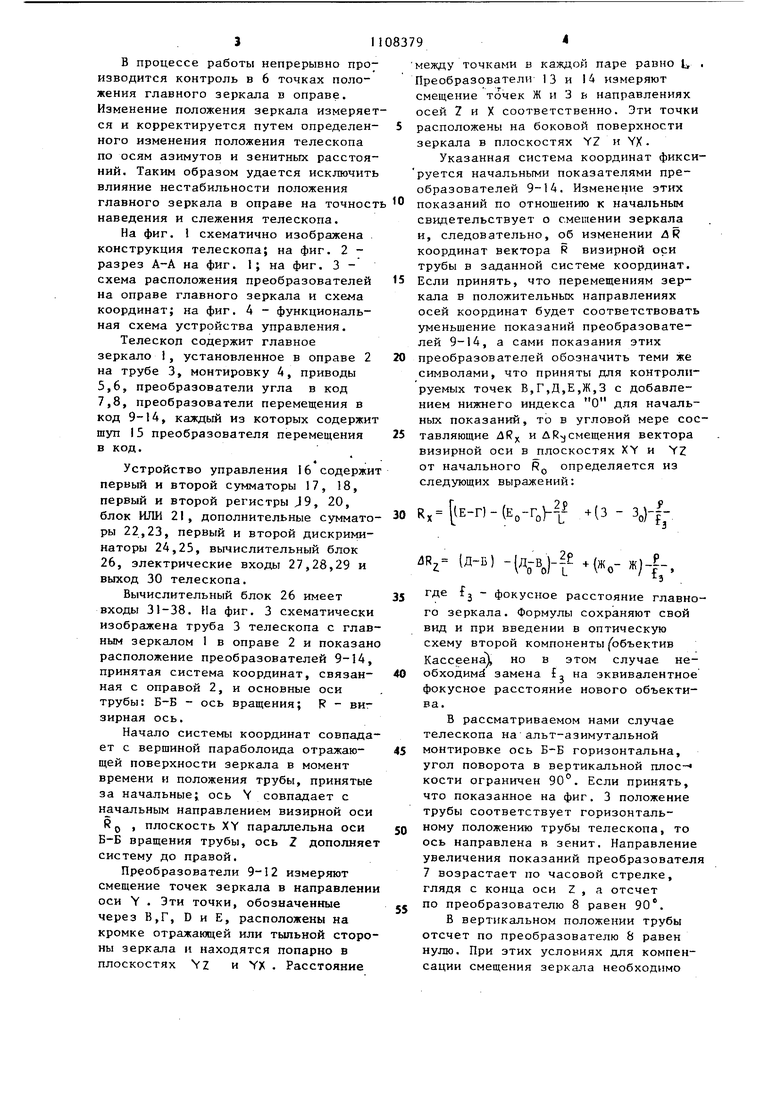
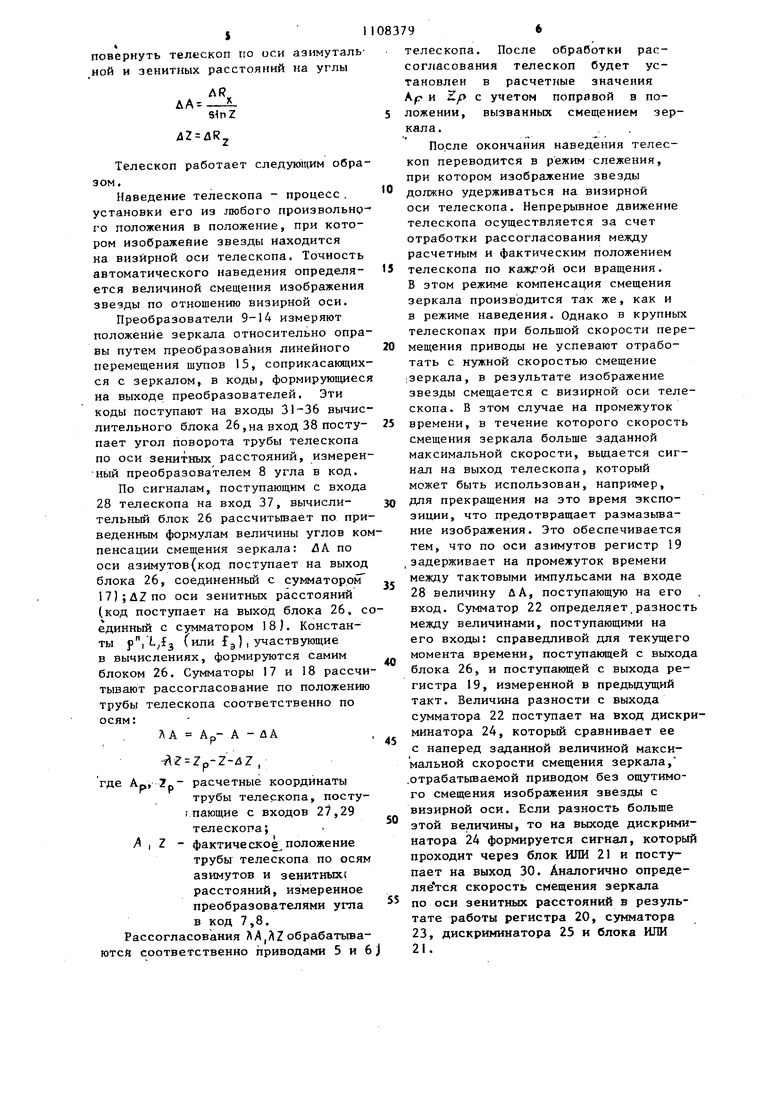
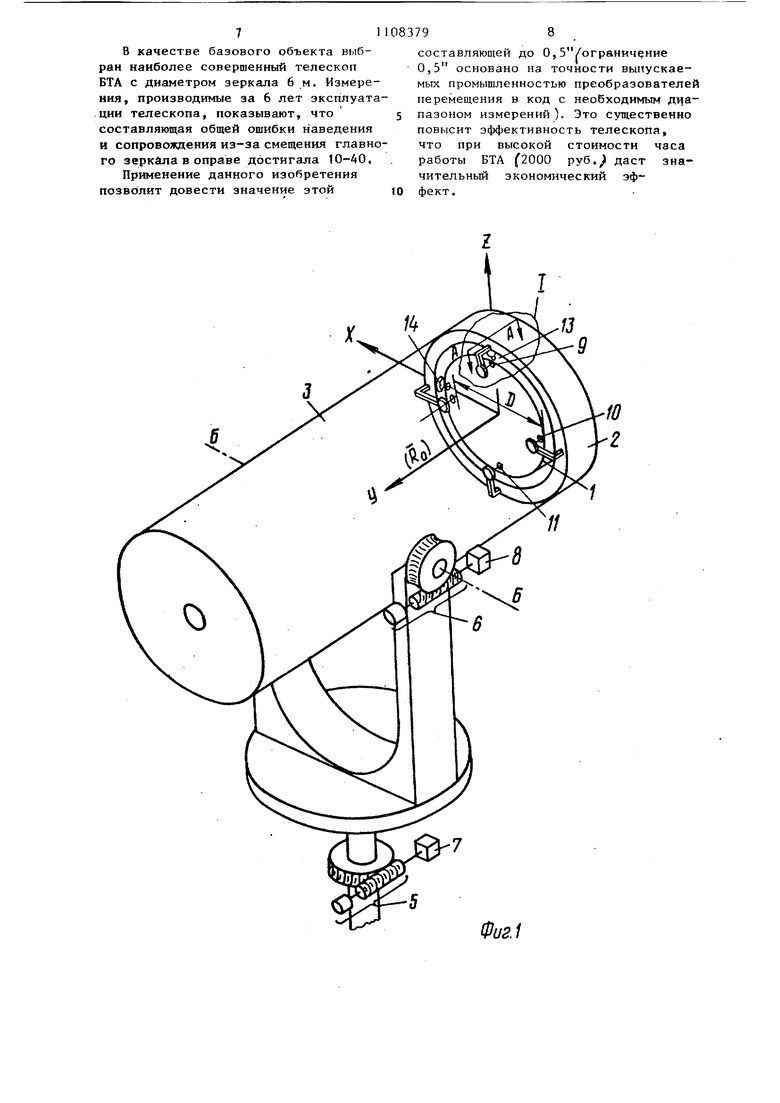
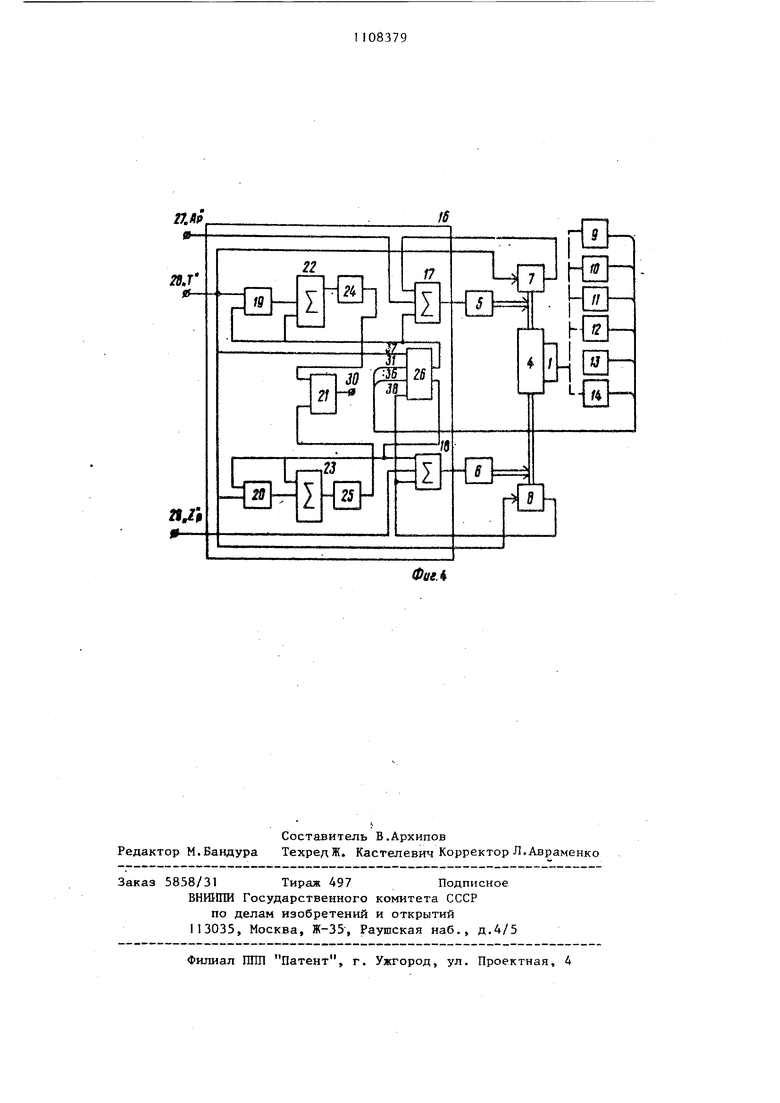
Изобретение относится к астроприборостроению и может найти применени при разработке кр 11ных и средних оптических телескопов. Известны оптические телескопы, в которых главное зеркало крепится в оправе на специальных разгрузочных устройствах, предназначенных для сохранения формы отражающей поверхности при эволюциях трубы телескопа. Разгрузочные устройства предназначен также для обеспечения неизменности положения зеркала относительно оправы. Конструкции разгрузочных устройств представляют собой системы рычагов на оправе зеркала с упорами в тело зеркала и контргрузами или комбинацию рычажных систем с пневматическими подушками, или комбинацию рычажных систем и гидравлических упоров. Все типы разгрузочных устройств должны обеспечивать переменное давление на тело зеркала в зависимости от пространственного положения трубы телескопа по наперед задан ному закону. Система управления этих телескопов строится с применением аналоговых средств управления1 Недостатком указанных телескопов является невысокая точность наведения и слежения, обусловленная применением аналоговых средств управления ri отсутствием непрерьшного контроля положения главного зеркала в оправе что особенно существенно для крупных телескопов. Известен также телескоп, содержащий главное зеркало в оправе трубы установленной на альт-азимутальной монтировке, расположенные на каждой оси электрические приводы и преобразователи угла в код, устройство управления, подключенное к электрическим приводам и преобразователям угла в код. Известньш телескоп обладает повы шенной точностью наведения благодар использованию цифровых следящих при водов t2. Однако точность наведения и слеж НИН в данной конструкции теле.скопа ограничена величиной неконтролируемого смещения зеркала в оправе. Это -обусловлено тем, что при изменении температуры внешней среды изменяетс геометрия рычажных механизмов раз. грузки и появляются закономерные ошибки в разгружающих силах. Отсутствует и стабильность во временп. 79J при изменении внешних условий коэффициентов трения в шарнирных сочленениях в механических системах разгрузки. В пневматических и гидравлических системах изменяются упругие свойства материала опорных подушек. Все это приводит к нарушению неизменности положения главного зеркала в оправе при эволюциях трубы и, следовательно, к ухудшению точности наведения и слежения телескопа. Кроме того, существующие конструкции требуют вьтолнения трудоемких работ по настройке устройств разгрузки в отношении неизменности положения зеркала в оправе до допусков, определяемых дифракционным размером звезды в фокальной плоскости объектива. Целью изобретения является повышение точности наведения и слежения телескопа эа счет учета изменения положения главного зеркала в оправе при поворотах трубы. Поставленная цель достигается тем, что в телескоп, содержащий главное зеркало в оправе трубы, установленной на альт-азимутальной монтировке, на каждой из осей которой расположены электрические приводы и преобразователи угла в код, устройство управления, подключенное к электрическим приводам и преобразователям угла в код, введены установленные на оправе главного зеркала шесть преобразователей перемещения в код, четыре из которых контактируют с отражающей или тыльной поверхностью эерка,па в точках, лежащих на двух взаимно перпендикулярных диаметрах, а два других контактируют с боковой поверхностью зеркала в точках, лежащих во взаимно перпендикулярных и проходящих через визирную ось телескопа плоскостях, при этом устройство управления выполнено в виде вычислительного блока, входы которого от первого до шестого подключены к выходам преобразователей перемещения угла в код, и двух сумматоров, выходы которых соединены с электрическими приводами, каждый из трех входов соединен соответственно с преобразователем угла в код, электрическим входом телескопа и выхоДом вычислительного блока, а установленный на оси зенитных расстояний преобразователь угла в код подключен к седьмому входу вычислительного блока. В процессе работы непрерывно про изводится контроль в 6 точках положения главного зеркала в оправе. Изменение положения зеркала измеряет ся и корректируется путем определенного изменения положения телескопа по осям азимутов и зенитных расстояний. Таким образом удается исключить влияние нестабильности положения главного зеркала в оправе на точност наведения и слежения телескопа. На фиг. 1 схематично изображена конструкция телескопа; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 схема расположения преобразователей на оправе главного зеркала и схема координат; на фиг. 4 - функциональная схема устройства управления. Телескоп содержит главное зеркало i, установленное в оправе 2 на трубе 3, монтировку 4, приводы 5,6, преобразователи угла в код 7,8, преобразователи перемещения в код 9-14, каждый из которых содержит шуп 15 преобразователя перемещения в код. Устройство управления 16 содержи первый и второй сумматоры 17, 18, первый и второй регистры J9, 20, первый и второй регистры J9, 20, блок ИЛИ 21, дополнительные суммато ры 22,23, первый и второй дискриминаторы 24,25, вычислительный блок 26, электрические входы 27,28,29 и выход 30 телескопа. Вычислительный блок 26 имеет входы 31-38. На фиг. 3 схематически изображена труба 3 телескопа с глав ным зеркалом 1 в оправе 2 и показан расположение преобразователей 9-14, принятая система координат, связанная с оправой 2, и основные оси трубы: Б-Б - ось вращения; R - визирная ось. Начало системы координат совпада ет с вершиной параболоида отражающей поверхности зеркала в момент времени и положения трубы, принятые за начальные; ось V совпадает с начальным направлением визирной оси RP , плоскость XY параллельна оси Б-Б вращения трубы, ось Z дополняе систему до правой. Преобразователи 9-12 измеряют смещение точек зеркала в направлени оси Y . Эти точки, обозначенные через В,Г, D и Е, расположены на кромке отражающей или тыльной сторо ны зеркала и находятся попарно в плоскостях Vz и YX . Расстояние ежду точками в каждой паре равно t, . реобразователи 13 и 14 измеряют мещение точек Ж и 3 в направлениях сей 2 и X соответственно. Эти точки асположены на боковой поверхности еркала в плоскостях YZ и YX. Указанная система координат фиксируется начальными показателями преобразователей 9-14. Изменение этих показаний по отношению к начальным свидетельствует о смешении зеркала и, следовательно, об изменении Л К координат вектора R визирной оси трубы в заданной системе координат. Если принять, что перемещениям зеркала в положительных направлениях осей координат будет соответствовать уменьшение показаний преобразователей 9-14, а сами показания этих преобразователей обозначить теми же символами, что приняты для контролируемых точек В,Г,Д,Е,Ж,3 с добавлением нижнего индекса О для начальных показаний, то в угловой мере составляющие ЛК и ДК)смещения вектора визирной оси в плоскостях XY и YZ от начального R, определяется из следующих выражений: г2р / f RX ) Г Г (д-в) -Кл)-г М«о-ж;-|-. где fj - фокусное расстояние главного зеркала. Формулы сохраняют свой вид и при введении в оптическую схему второй компоненты(Ъбъектив Кассеена), но в этом случае необходимй замена { на эквивалентное фокусное расстояние нового объектива. В рассматриваемом нами случае телескопа на альт-азимутальной монтировке ось Б-Б горизонтальна, угол поворота в вертикальной плос-« кости ограничен 90°. Если принять, что показанное на фиг. 3 положение трубы соответствует горизонтальному положению трубы телескопа, то ось направлена в зенит. Направление увеличения показаний преобразователя 7 возрастает по часовой стрелке, глядя с конца оси Z , сЯ отсчет по преобразователю 8 равен 90. В вертикальном положении трубы отсчет по преобразователю 8 равен нулю. При этих условиях для компенсации смещения зеркала необходимо повернуть телескоп по оси аэимуталь ной и зенитных расстояний на углы SlnZ Телескоп работает следующим обра зом. Наведение телескопа - процесс. установки его из любого произвольно го положения в положение, при котором изображейие звезды находится на визирной оси телескопа. Точность автоматического наведения определяется величиной смещения изображения звезды по отношению визирной оси. Преобразователи 9-14 измеряют положение зеркала относительно опра вы путем преобразования линейного перемещения шупов 15, соприкасающих ся с зеркалом, в коды, формирующиес на выходе преобразователей. Эти коды поступают на входы 31-36 вычис лительного блока 26,на вход 38 поступает угол поворота трубы телескопа по оси зенитных расстояний, измерен ный преобразователем 8 угла в код. По сигналам, поступающим с входа 28 телескопа на вход 37, вычислительный блок 26 рассчитьгоает по при веденным формулам величины углов ко пенсации смещения зеркала: иА по оси азимутов(код поступает на выход блока 26, соединенный с сумматором 17);Д2по оси зенитных расстояний (код поступает на выход блока 26, с единный с сумматором 18). Константы Ji fg) I участвующие в вычислениях, формируются самим блоком 26. Сумматоры 17 и 18 рассчи тывают рассогласование по положению трубы телескопа соответственно по осям: ЛА Ар- А - ЛА г , где А, расчетные координаты трубы телескопа, посту; пающие с входов 27,29 телескопа; А , 2 - фактическое положение трубы телескопа по осям азимутов и зенитных расстояний, измеренное преобразователями угла в код 7,8. Рассогласования ЛА,Д7обрабатьшаютсй соответственно приводами 5 и 6 телескопа. После обработки рассогласования телескоп будет установлен в расчетные значения Af и Zf с учетом поправой в положении, вызванных смещением зеркала . После окончания наведения телескоп переводится в режим слежения, при котором изображение звезды должно удерживаться на визирной оси телескопа. Непрерывное движение телескопа осуществляется за счет отработки рассогласования между расчетным и фактическим положением телескопа по оси вращения. В этом режиме компенсация смещения зеркала производится так же, как и в режиме наведения. Однако в крупных телескопах при большой скорости перемещения приводы не успевают отработать с нужной скоростью смещение 1зеркала, в результате изображение звезды смещается с визирной оси телескопа. В этом случае на промежуток времени, в течение которого скорость смещения зеркала больше заданной максимальной скорости, выдается сигнал на выход телескопа, который может быть использован, например, для прекращения на это время экспозиции, что предотвращает размазьшание изображения. Это обеспечивается тем, что по оси азимутов регистр 19 задерживает на промежуток времени между тактовыми импульсами на входе 28 величину и А, поступающую на его вход. Сумматор 22 определяет,разность между величинами, поступающими на его входы: справедливой для текущего момента времени, поступающей с выхода блока 26, и поступающей с выхода регистра 19, измеренной в предыдущий такт. Величина разности с выхода сумматора 22 поступает на вход дискриминатора 24, который сравнивает ее с наперед заданной величиной максимальной скорости смещения зеркала, отрабатываемой приводом без ощутимого смещения изображения звезды с визирной оси. Если разность больше этой величины, то на выходе дискриминатора 24 формируется сигнал, который проходит через блок ИЛИ 21 и поступает на выход 30. Аналогично определяется скорость смещения зеркала по оси зенитных расстояний в результате работы регистра 20, сумматора 23, дискриминатора 25 и блока ИЖ 21.
71
В качестве базового объекта выбран наиболее совершенный телескоп БТА с диаметром зеркала 6 м. Измерения, производимые за 6 лет эксплуатации телескопа, показывают, что составляющая общей ошибки наведения и сопровождения из-за смещения главно го зеркала в оправе достигала 10-40.
Применеиие данного изобретения позвс лит довести значение этой
798
составляющей до О,5 /ограничение 0,5 основано на точности выпускаемых промышленностью преобразователей перемещения в код с необходи 1ым дчапазоном измерений). Это существенно повысит эффективность телескопа, что при высокой стоимости часа работы БТА (2000 руб. даст значительный экономический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления телескопом | 1974 |
|
SU511559A1 |
| Устройство для управления наведением телескопа | 1974 |
|
SU560213A1 |
| Устройство для управления телескопом на альтазимутальной монтиолвке | 1974 |
|
SU510691A1 |
| Система управления телескопом | 1986 |
|
SU1390600A1 |
| Устройство для управления положением телескопа | 1975 |
|
SU552592A1 |
| СПУТНИКОВАЯ ЛАЗЕРНАЯ ДАЛЬНОМЕРНАЯ СИСТЕМА | 1992 |
|
RU2037849C1 |
| Система управления телескопом | 1979 |
|
SU826273A1 |
| Телескоп | 1983 |
|
SU1113769A1 |
| Устройство для обнаружения и коррекции гнутой трубы телескопа | 1980 |
|
SU970295A1 |
| Система управления телескопом | 1984 |
|
SU1188699A1 |
ТЕЛЕСКОП, содержащий главное зеркало в оправе трубы, установленной на альт-азимутальной монтировке, на каждой из осей которой расположены электрические приводы и преобразователи угла в код, устройство управления, подключенное к электрическим приводам и преобразователям угла в код, отличающийся тем,что, с целью повьшения точности наведения и слежения телескопа, в него введены установленные на оправе главного зеркала шесть преобразователей перемещения в код, четыре из которых контактируют с отражающей или тыльной стороной зеркала в точках, лежащих на двух взаимно перпендикулярных диаметрах, а два других контактируют с боковой поверхностью зеркала в точках, лежащих во взаимно перпендикулярных и проходящих через визирную ось .телескопа плоскостях, при этом устройство управления выполнено в виде вычислительного блока, входы которого от первого до шестого подключены к выходам преобразователей перемещения в код, и двух сумматоров, выходы которых соединены с электрическими при- g водами, каждый из трех входов соеди(П нен соответственно с преобразователем угла в код, электрическим входом телескопа и выходом вычислительного блока, а установленный на оси зенитных расстояний преобразователь угла в код подключен к седьмому входу вычислительного блока. 00 со to
Фиг.1
I(ft-a)
/
-V.
w
1
t
/
Фа&.3
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Михельсон Н.Н | |||
| Оптические телескопы, М., Наука, 1976, с.396 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ионнислани Б.К | |||
| Оптико-механическая промьшленность, 1970, № 4, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
