Известны приводы телескопа, снабженные механической передачей с зубчатым зацеплением.
Предлагаемый привод телескопа с механической передачеп отлпчается от известных тем, что системы передачи в нем выполнены в виде двух разветвляюпхихся кинематических цепей. По одной из цепей через фрикционную сцепную муфту передаются посредством зубчатой передачи только установочное движение, а по другой, посредством фрикционных катков,-следящее движение. Описываемая конструкция привода телескопа обеспечивает повышение пагрузочной способности при установочном движении и безонасность нри ручном торможепии, а также новы1пение точности и плавности при следян1,ем движении. Для автоматического включенпя кинематической ветви, соответствующей виду движения, применен управляющий включением элемент, например электромагнит, выполненный сблокированным с электродвнгателем привода. Для предохранительной блокировки нpliвoдa нрн наличии масляных опор телескопа привод выполнен с учетом возможности включения его кинематических ветвей посредством давления, создаваемого для онор телескопа.
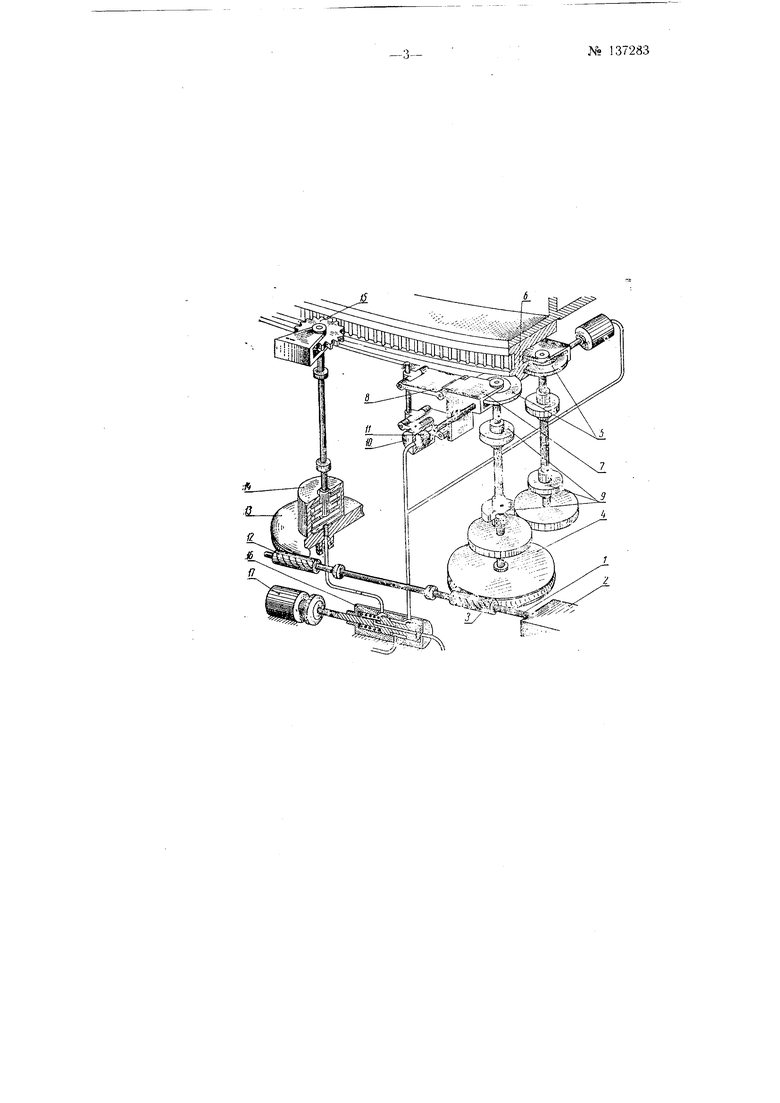
Предлагаемый привод (см. кинематическую схему) телескопа имеет кинематическую цепь, разделенную на две ветви, одна из которых служит для наведения телескопа (установочпое движеиие), а другая-для наблюдения за объектом (движение слежения). Вал / привода приводится во вращение через редуктор 2 от электродвигателя (на чертеже не показан). На валу } имеется червяк 3, являющийся началом ветви следящего движения. С червяком 3 находится в зацепле П)и червячное колесо 4, двнжепие которого передается иа фрикционные катки 5. Катки 5 соприкасаются с дорожками кольцевого погона 6, на котором раз№ 137283-2-
мешена вращающаяся часть телескопа. Обоймы 7 катков 5 укреплены на параллело.граммных рычагах 8, благодаря чему катки самоустанавливаются относительно дорожек погона 6, но не могут перекашиваться. Осевые перемешения катков компенсируются мембраннымп муфтами 0. Включение кинематической ветви следяшего движения производится подачей давления в пилиндры 10. При этом поршни // прижимают катки к дорожкам погона.
Кинематическая ветвь установочного движения образована червяком 12, находящимся на валу / привода, червячном колесом 13, фрикционной сцепной муфтой /4 и зубчатым колесом 15. Включение ветви установочного движения производится путем подачи давления в фрикционную муфту 14. Подача давления в цилиндры 10 или муфту 14 осуществляется золотниковым устройством 16, управляемым, например, электромлгпитом /7. Для автоматического включения кинематической ветви, соответствующей виду движения, электромагнит П сблокирован с электродвигателем привода. Таким образом, установочное движение, при котором возникают значительные ускорения, а, следовательно, и большие нагрузки, передается посредством сравнительно грубой зубчатой передачи. Фрикционная сцепная муфта 14, проскальзывая при перегрузках, обеспечивает безопасность даже при резком торможении привода. Движение слежения передается через фрикционные катки, что обеспечивает высокую степень точности и плавности движения. Малые ускорения, возникающие при этом, обеспечивают врап1ение катков без пробуксовки.
Для включения кинематических ветвей привода используется давление, создаваемое для питания масляпых опор телескопа. Поэтому в случае отсутствия давления в системе маслопитания опор невозможно включение ветвей привода. Иными словами, предлагаемая конструкция привода телескопа обеспечивает автоматическую предохранительную блокировку привода.
Предмет изобретения
1.Привод телескопа с механической передачей, отличающийся тем, что, с целью обеспечения повышения нагрузочной -способности при установочном движении и безопасности при резком торможении, а также повышения точности и нлавности при следящем движении, в нем система передачи выполнена в виде двух разветвляющихся кинематических цепей, по одной из которых через фрикционную сцепную муфту передается, посредством зубчатой передачи, только установочное ..снижение, а по другой, посредством фрикционных катков, следящее движение.
2.Привод телескопа по п. 1, о т л и ч а ю щ и и с я тем, что, с 1елью автоматического включения ветви, соответствующей виду движения, управляющий включением элемент его, например электромагнит, выполнен сблокированным с электредвигателем привода.
3.Привод телескопа по п. 1, о т л и ч а ю щ и и с я тем, что, с целью предохранительной блокировки привода при наличии масляных опор телескопа, си выполнен с возможностью включения ветвей привода иосредствсгл давления, создаваемого ;:ля этих опор.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод телескопа | 1961 |
|
SU151842A1 |
| Привод телескопа | 1962 |
|
SU152323A1 |
| Приспособление к обжимному прессу для подачи на его приемный стол сшитых книжных блоков | 1955 |
|
SU104054A1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| МЕХАНИЗМ ПОВОРОТА (ВАРИАНТЫ) | 2002 |
|
RU2225549C2 |
| Привод пульсирующего конвейера | 1984 |
|
SU1180316A2 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ РЕВЕРС-РЕДУКТОРОМ | 2001 |
|
RU2216479C2 |
| Транспортирующее устройство для передачи, например, книжных блоков, в полиграфическом производстве | 1957 |
|
SU114516A1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| Фрикционный привод наведения | 1986 |
|
SU1442759A1 |