[0001]
Перекрестные ссылки на связанные заявки
[0002] Настоящая заявка является частично продолжающей заявкой для патентной заявки США сер. №12/056827, поданной 27 марта 2008 года, содержание которой настоящим включается в настоящую заявку в полном объеме по ссылке.
Предпосылки создания предлагаемого изобретения
1. Область техники, к которой относится предлагаемое изобретение
[0003] Предлагаемое изобретение относится в общем к системе дистанционного управления для передачи сигналов железнодорожному транспортному средству. В частности, предлагаемое изобретение относится к системе дистанционного управления, снабженной жидкокристаллическим сенсорным экраном для отслеживания состояния железнодорожного транспортного средства и подачи команд железнодорожному транспортному средству. Кроме того, предлагаемое изобретение относится к системе дистанционного управления, снабженной совокупностью переключателей системы безопасности. В частности, система дистанционного управления согласно предлагаемому изобретению пригодна для применения на сортировочных станциях и/или в маневровых парках.
2. Описание уровня техники
[0004] В уровне техники известны системы дистанционного управления для управления локомотивами. Обычно системы дистанционного управления локомотивами содержат два главных компонента, а именно устройство дистанционного управления и контроллерный модуль локомотива. Работа упомянутого устройства дистанционного управления состоит в посылке командных сигналов на контроллерный модуль локомотива. Контроллерный модуль локомотива обычно установлен на локомотиве и выполнен с возможностью принимать командные сигналы, посылаемые устройством дистанционного управления по линии беспроводной связи.
[0005] Когда оператор желает начать движение локомотива, например, в определенном направлении или с определенной скоростью, он, чтобы задать нужные параметры (например, «вперед», «назад», «скорость» и т.д.), манипулирует органами управления на устройстве дистанционного управления. Для формирования командного сигнала эти параметры кодируются, а затем сформированный командный сигнал устройство дистанционного управления посылает на локомотивное управляющее устройство. Упомянутое локомотивное управляющее устройство обрабатывает этот командный сигнал и выдает местные управляющие сигналы на управляющий интерфейс, обеспечивающий выполнение локомотивом требуемых команд.
[0006] Один из недостатков существующих систем дистанционного управления состоит в том, что устройство дистанционного управления только одно, что ограничивает количество сигналов аварийной остановки или сигналов остановки, передаваемых существующими системами дистанционного управления. Еще одним недостатком существующих систем дистанционного управления является недостаток информации, предоставляемой оператору.
[0007] Таким образом, в отрасли существует потребность в системе дистанционного управления, хотя бы частично компенсирующая недостатки существующих систем дистанционного управления.
Краткое описание предлагаемого изобретения
[0008] Предлагаемое изобретение относится к системе дистанционного управления для управления железнодорожным транспортным средством. Железнодорожное транспортное средство снабжено регулятором тяги, обеспечивающим для железнодорожного транспортного средства тяговую мощность для его движения, и тормозной системой, обеспечивающей для железнодорожного транспортного средства тормозную мощность для его остановки. Система дистанционного управления содержит устройство дистанционного управления, выполненное с возможностью передачи сигналов. Упомянутое устройство дистанционного управления содержит устройство визуального отображения информации, реализованное в виде крупногабаритного видеодисплея для визуального отображения информации о железнодорожном транспортном средстве в режиме реального времени. Кроме того, в системе дистанционного управления предусмотрен первый контроллерный модуль, соединенный с железнодорожным транспортным устройством и находящийся в связи с устройством дистанционного управления. С помощью упомянутого первого контроллерного модуля осуществляется отслеживание некоторого набора предварительно установленных параметров железнодорожного транспортного средства и прием команд от устройства дистанционного управления для управления упомянутым набором предварительно установленных параметров железнодорожного транспортного средства. Упомянутый первый контроллерный модуль снабжает устройство дистанционного управления информацией в режиме реального времени.
[0009] Согласно другому аспекту осуществления предлагаемого изобретения предусматривается создание способа управления железнодорожным транспортным средством. Это железнодорожное транспортное средство снабжено регулятором тяги, обеспечивающим для железнодорожного транспортного средства тяговую мощность его движения, и тормозной системой, обеспечивающей для железнодорожного транспортного средства тормозную мощность его торможения. Предлагаемый способ предусматривает наличие устройства дистанционного управления, при этом в упомянутом устройстве дистанционного управления использована гаптическая технология. Предусмотрено также наличие первого контроллерного модуля, который соединен с железнодорожным транспортным устройством и связан с устройством дистанционного управления.
От устройства дистанционного управления на упомянутый первый контроллерный модуль передается командный сигнал. Команды от устройства дистанционного управления принимаются первым контроллерным модулем для управления некоторым набором предварительно заданных параметров железнодорожного транспортного средства. Предварительно заданные параметры железнодорожного транспортного средства упомянутого набора подвергаются текущему контролю через посредство первого контроллерного модуля. Первый контроллерный модуль снабжает устройство дистанционного управления информацией в режиме реального времени. Наконец, упомянутая информация в режиме реального времени отображается на устройстве дистанционного управления.
Краткое описание чертежей
[0010] На фиг.1 показана блок-схема системы дистанционного управления согласно предлагаемому изобретению. [ООН] На фиг.2 показана блок-схема системы дистанционного управления согласно другому варианту осуществления предлагаемого изобретения.
[0012] На фиг.3 схематично изображен конкретный неограничивающий пример физического осуществления портативного аварийного коммутатора согласно предлагаемому изобретению.
[0013] На фиг.4 показана блок-схема системы дистанционного управления согласно еще одному варианту осуществления предлагаемого изобретения.
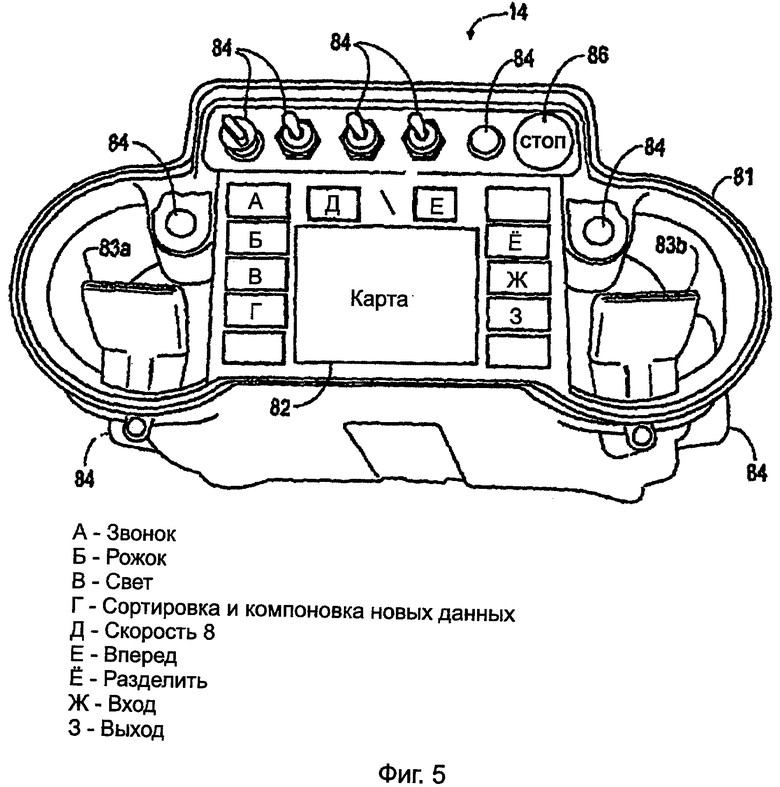
[0014] На фиг.5 схематично изображен конкретный неограничивающий пример физического осуществления системы дистанционного управления согласно предлагаемому изобретению.
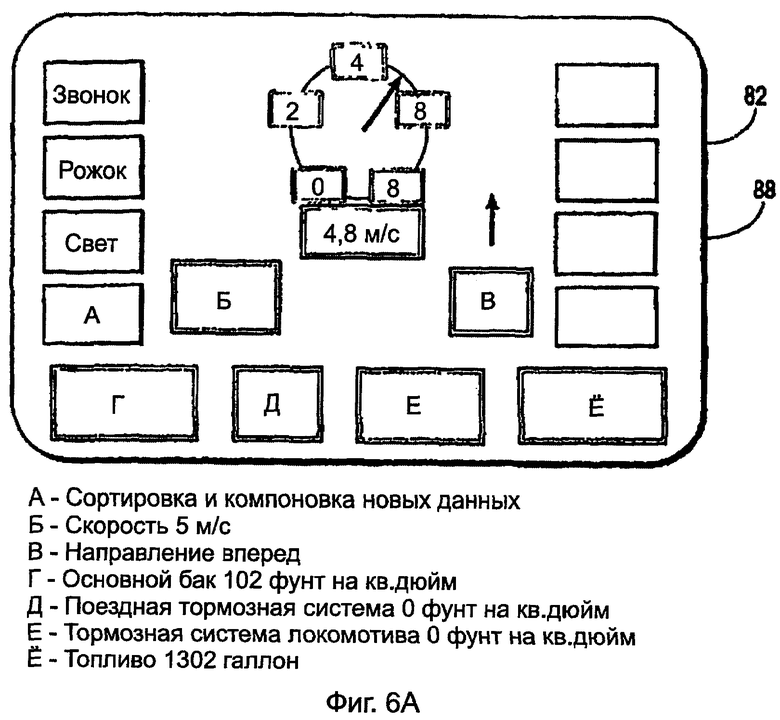
[0015] На фиг.6A схематично изображен конкретный неограничивающий пример внешнего вида сенсорного экрана системы дистанционного управления согласно предлагаемому изобретению.
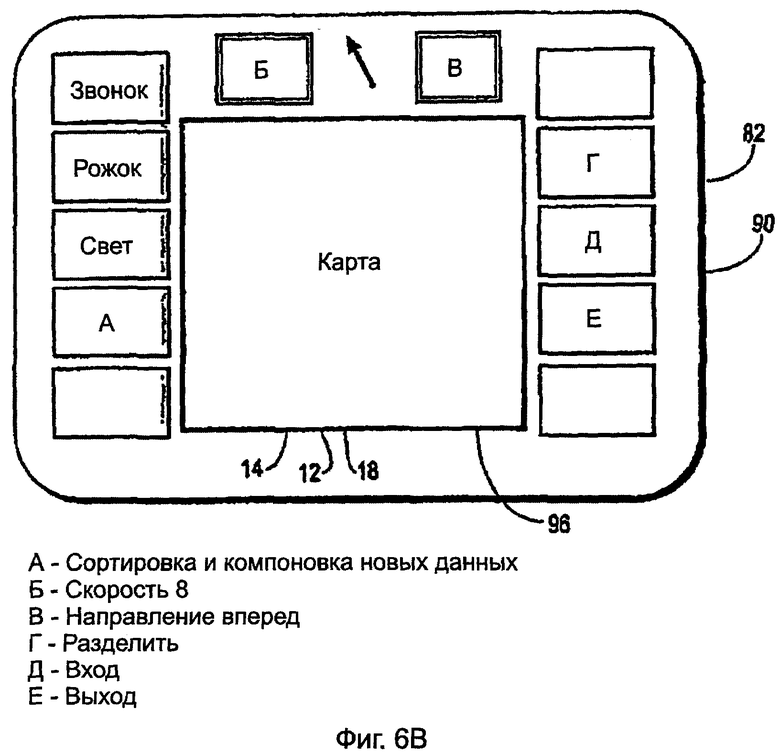
[0016] На фиг.6B схематично изображен конкретный неограничивающий пример другого внешнего вида сенсорного экрана системы дистанционного управления согласно предлагаемому изобретению.
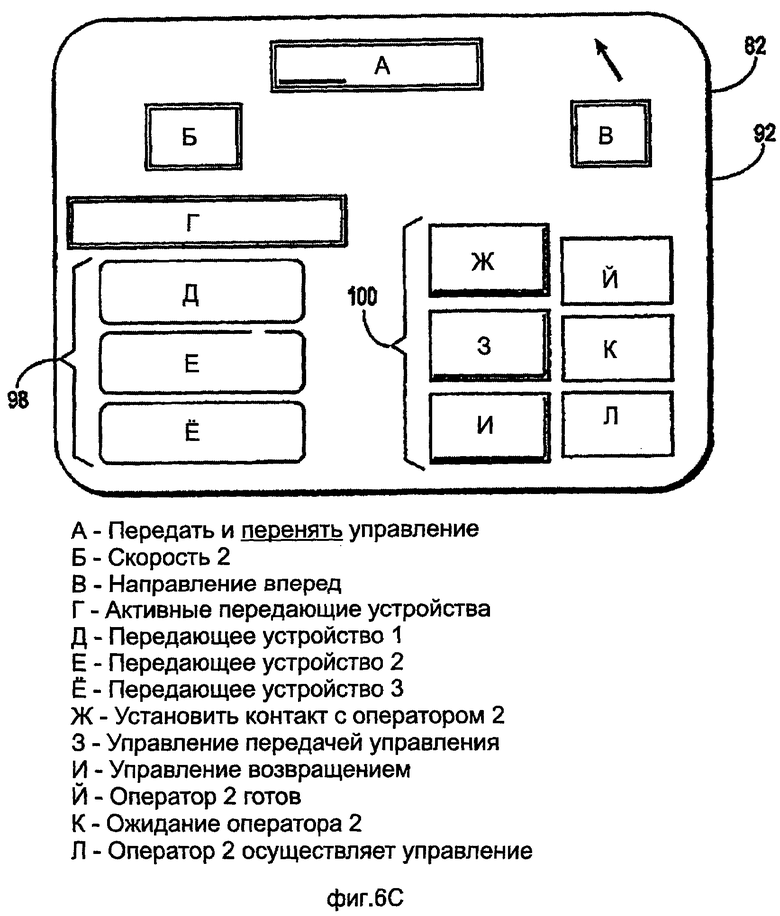
[0017] На фиг.6C схематично изображен конкретный неограничивающий пример еще одного внешнего вида сенсорного экрана системы дистанционного управления согласно предлагаемому изобретению.
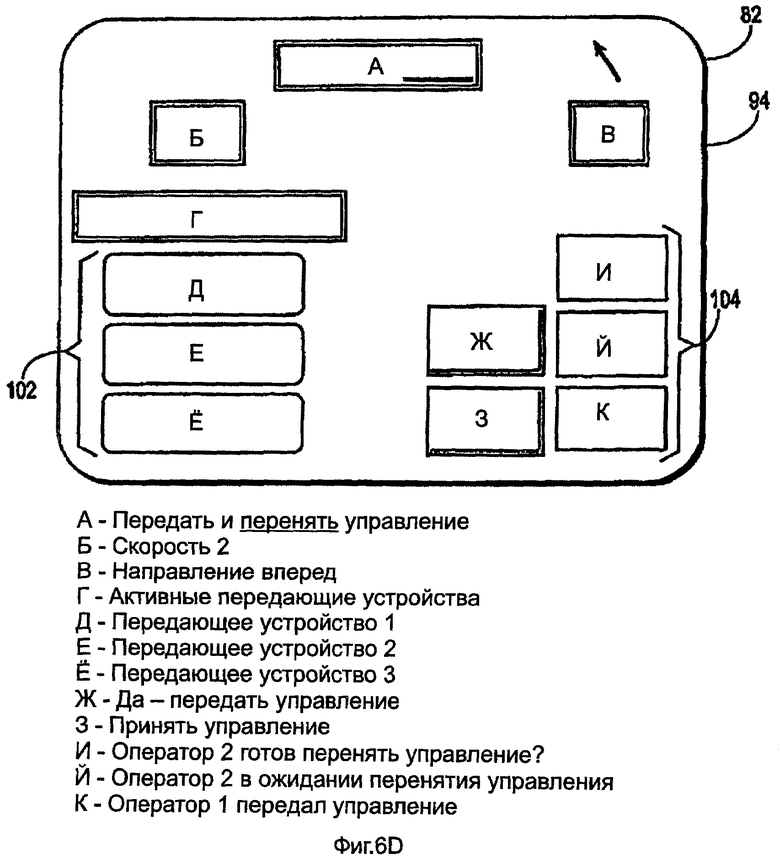
[0018] На фиг.6D схематично изображен конкретный неограничивающий пример окончательного внешнего вида сенсорного экрана системы дистанционного управления согласно предлагаемому изобретению.
[0019] На фиг.7 изображен конкретный неограничивающий пример физического осуществления устройства дистанционного управления согласно предлагаемому изобретению.
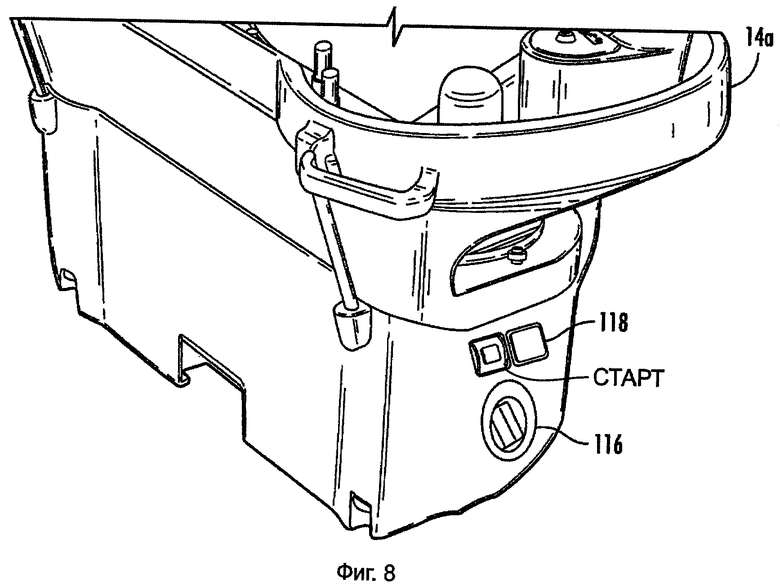
[0020] На фиг.8 показана часть устройства дистанционного управления, являющегося конкретным неограничивающим примером физического осуществления предлагаемого изобретения.
Подробное описание предлагаемого изобретения
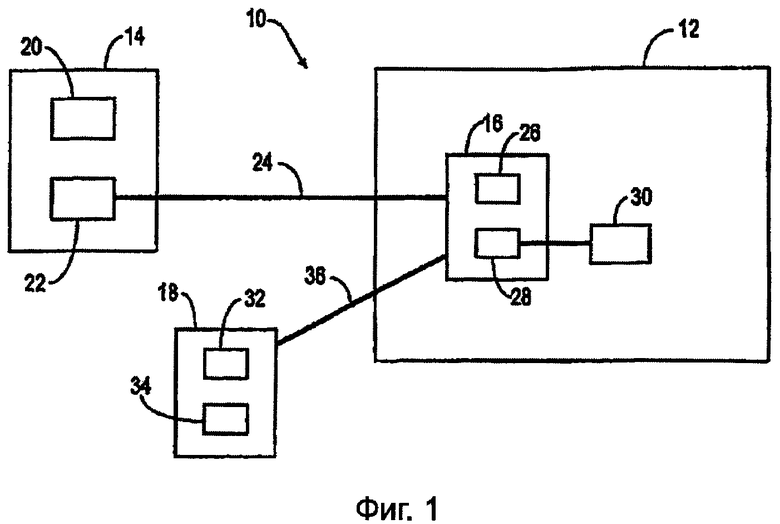
[0021] Предлагаемое изобретение относится к системе дистанционного управления 10 для управления железнодорожным транспортным средством 12. Под железнодорожным транспортным средством в тексте настоящей заявки понимаются такие железнодорожные транспортные средства, как, например, локомотивы и моторные вагоны, но применимость предлагаемого изобретения этими примерами не ограничена. Обратимся теперь к прилагаемым чертежам. На фиг.1 показана система дистанционного управления 10 согласно предлагаемому изобретению. Согласно одному из вариантов осуществления предлагаемого изобретения система дистанционного управления 10 содержит устройство дистанционного управления 14 и первый контроллерный модуль 16, выполненный с возможностью установки на железнодорожном транспортном средстве 12. Согласно одному из вариантов осуществления предлагаемого изобретения система дистанционного управления 10 дополнительно содержит переносный аварийный коммутатор 18, предназначенный для подачи сигнала остановки на первый контроллерный модуль 16 с целью остановки железнодорожного транспортного средства 12.
[0022] Упомянутое устройство дистанционного управления 14 имеет вход 20 для приема от оператора командных сигналов, передающих команды, которые должны быть выполнены железнодорожным транспортным средством 12. Этими командными сигналами могут передаваться, например, команды скорости, торможения, направления движения, регулирования тяги и другие. Устройство дистанционного управления 14 дополнительно содержит узел обработки данных 22, связанный со входом 20 для приема командных сигналов. Упомянутый узел обработки данных 22 передает командные сигналы, несущие команды, подлежащие выполнению железнодорожным транспортным средством 12, на первый контроллерный модуль 16 через посредство линии беспроводной связи 24. В качестве упомянутой линии беспроводной связи 24 может быть использована любая подходящая линия связи, способная передавать желаемую информацию от устройства дистанционного управления 14 на первый контроллерный модуль 16, например, радиочастотный канал, линия микроволновой связи, линия инфракрасной связи, линия спутниковой связи и т.д.
[0023] Согласно одному из конкретных вариантов осуществления предлагаемого изобретения устройство дистанционного управления 14 представляет собой переносный блок, который может носить оператор, находящийся на расстоянии от железнодорожного транспортного средства 12. Согласно альтернативному варианту осуществления предлагаемого изобретения устройство дистанционного управления 14 представляет собой стационарный блок, установленный на расстоянии от железнодорожного транспортного средства 12, например, на диспетчерской вышке или операторском посте.
[0024] Первый контроллерный модуль 16 выполнен с возможностью установки на железнодорожном транспортном средстве 12. Первый контроллерный модуль 16 имеет вход 26 для приема сигналов, передаваемых устройством дистанционного управления 14 по беспроводной линии связи 24. Первый контроллерный модуль 16 дополнительно содержит модуль обработки данных 28 для генерирования местных управляющих сигналов на основе сигналов, поступающих от устройства дистанционного управления 14. Как будет более подробно описано далее, когда от устройства дистанционного управления 14 передаются командные сигналы на первый контроллерный модуль 16, предназначенный для конкретных командных сигналов, модуль обработки данных 28 может выдавать местные управляющие сигналы на управляющий интерфейс 30 для того, чтобы заставлять железнодорожное средство 12 выполнять команды, переносимые сигналом, посылаемым устройством дистанционного управления 14.
[0025] Для целей настоящего описания термин «управляющий интерфейс 30» относится в целом к совокупности различных исполнительных механизмов, расположенных на железнодорожном поезде и предназначенных для выполнения команд согласно командным сигналам, поступающим от первого управляющего модуля 16. В качестве лишь некоторых примеров таких исполнительных механизмов могут быть названы, среди прочих, исполнительные механизмы, управляющие регулятором тяги и тормозами.
[0026] Переносный аварийный коммутатор 18 имеет выключатель остановки 32 для подачи сигнала остановки, а также выключатель сигнала отбоя 34. Переносный аварийный коммутатор 18 связан с первым контроллерным модулем 16, через посредство которого приведенный в действие выключатель остановки 32 передает сигнал остановки от переносного аварийного коммутатора 18 на первый контроллерный модуль 16 по линии беспроводной связи 36. Должно быть понятно, что линия беспроводной связи 36 работает аналогично упоминавшейся выше линии беспроводной связи 24. Переносный аварийный коммутатор 18 любой индивидуум может носить в окрестности дистанционно управляемого железнодорожного транспортного средства 12, и этот индивидуум определяет наличие опасной ситуации, и если какая-либо опасная ситуация наличествует, то этот индивидуум, находящийся в окрестности дистанционно управляемого железнодорожного транспортного средства 12, может инициировать сигнал остановки путем приведения в действие выключателя остановки 32 переносного аварийного коммутатора 18. Выключатель сигнала отбоя 34 переносного аварийного коммутатора 18 может быть приведен в действие индивидуумом, находящимся в окрестности дистанционно управляемого железнодорожного транспортного средства 12 с целью оповещения пользователя устройства дистанционного управления 14 о том, что управлять железнодорожным транспортным средством 12 с помощью устройства дистанционного управления 14 снова безопасно. При приведении в действие выключателя остановки 32 переносного аварийного коммутатора 18 индивидуумом, находящимся в окрестности дистанционно управляемого железнодорожного транспортного средства 12, передается сигнал на первый контроллерный модуль 16 для немедленной остановки железнодорожного транспортного средства 12. Должно быть понятно, что хотя на фиг.1 показан только один переносный аварийный коммутатор 18, система дистанционного управления 10 согласно предлагаемому изобретению может содержать любое количество переносных аварийных коммутаторов 18, если это представляется желательным для текущего контроля состояния железнодорожного транспортного средства 12 с помощью устройства дистанционного управления 14. Сигнал остановки отправляется на первый контроллерный модуль 16 для формирования надлежащих командных сигналов для железнодорожного транспортного средства 12 и для обеспечения оповещения устройства дистанционного управления 14 о том, что от переносного аварийного коммутатора 18 послан сигнал на первый контроллерный модуль 16. Должно быть понятно, что сигнал остановки, инициированный переносным аварийным коммутатором и переданный на первый контроллерный модуль 16, может быть сигналом любого типа, лишь бы он обеспечивал остановку железнодорожного транспортного средства 12, будь то аварийная или обычная остановка, как это понимается средним специалистом в данной отрасли.
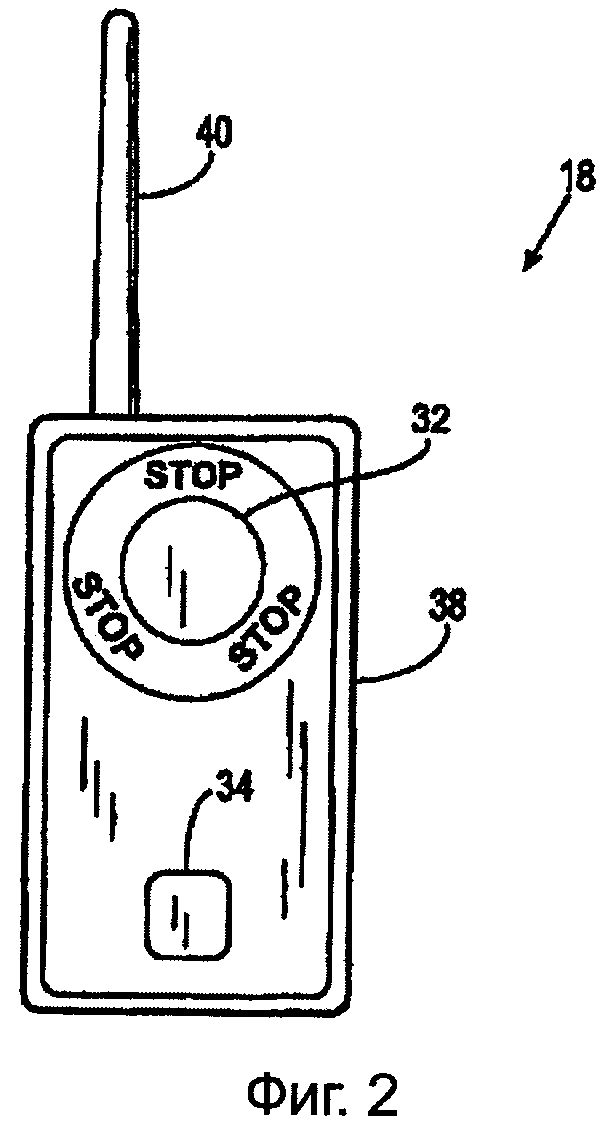
[0027] На фиг.2 проиллюстрирован один из конкретных вариантов осуществления переносного аварийного коммутатора 18. Кроме выключателя остановки 32 и выключателя сигнала отбоя 34 переносный аварийный коммутатор 18 содержит корпус 38 и антенну 40, соединенную с корпусом 38. На фиг.2 проиллюстрирован один из конкретных вариантов осуществления переносного аварийного коммутатора 18, однако должно быть понятно, что переносный аварийный коммутатор может быть реализован и иным образом, лишь бы он был снабжен выключателем остановки 32 и выключателем сигнала отбоя 34, так чтобы была обеспечена передача сигнала остановки на первый контроллерный модуль 16 железнодорожного транспортного средства 12.
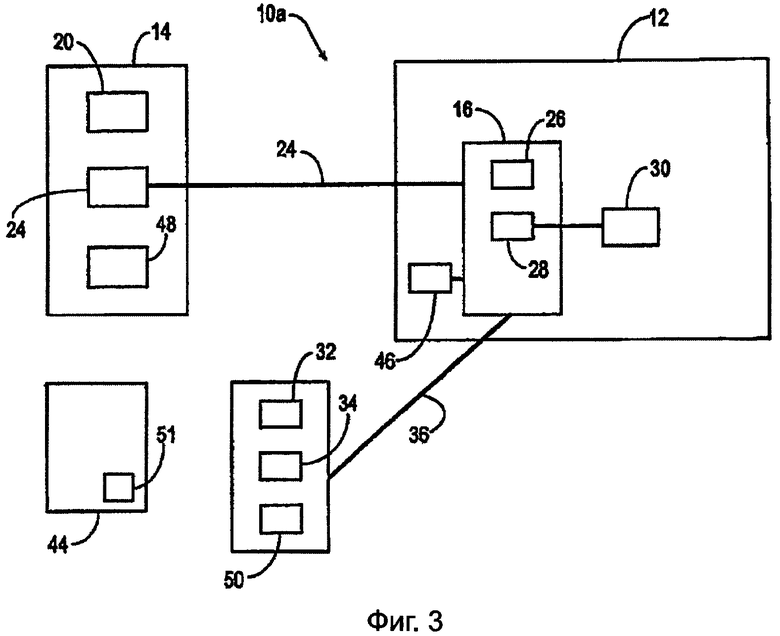
[0028] Теперь обратимся к фиг.3, на которой проиллюстрирован другой вариант осуществления системы дистанционного управления, обозначенной позицией 10a. Эта система дистанционного управления 10a включает железнодорожное транспортное средство 12, устройство дистанционного управления 14, первый контроллерный модуль 16 и переносный аварийный коммутатор 18, описанный в данном описании при описании системы дистанционного управления 10. Кроме того, система дистанционного управления 10a дополнительно включает командный центр 44 для текущего контроля состояния железнодорожного транспортного средства 12, устройство дистанционного управления 14, первый контроллерный модуль 16 и переносный аварийный коммутатор 18. Железнодорожное транспортное средство 12 рассматриваемой системы дистанционного управления 10a снабжено устройством 46 Глобальной системы определения местоположения (GPS-устройство) для предоставления информации о местоположении железнодорожного транспортного средства 12 устройству дистанционного управления 14 и, тем самым, пользователю устройства дистанционного управления 14. GPS-устройство 46 установлено на железнодорожном транспортном средстве 12 и находится в связи с первым контроллерным модулем 16, который передает информацию о местоположении железнодорожного транспортного средства 12 устройству дистанционного управления 14 по линии беспроводной связи 24. Должно быть понятно, что связь между GPS-устройством 46 и первым контроллерным модулем 16 может быть осуществлена по любому известному в данной отрасли способу, обеспечивающему поддержание связи, например по линии беспроводной связи или по линии аппаратной связи. В другом варианте осуществления предлагаемого изобретения устройство дистанционного управления 14 системы дистанционного управления 10a включает GPS-устройство 48 для предоставления информации о местоположении устройства дистанционного 14 и/или оператора устройства дистанционного 14. Согласно еще одному варианту осуществления предлагаемого изобретения переносный аварийный коммутатор 18 системы дистанционного управления 10a включает GPS-устройство 50 для предоставления информации о местоположении переносного аварийного коммутатора 18 и/или индивидуума, который осуществляет текущий контроль состояния железнодорожного средства 12 и при котором находится переносный аварийный коммутатор 18. Согласно еще одному варианту осуществления предлагаемого изобретения командный центр 44 снабжен GPS-устройством 51 для предоставления системе дистанционного управления 10a базисной точки, обеспечивая, тем самым, более надежное определение местоположения устройства дистанционного управления 14, переносного аварийного коммутатора 18 и железнодорожного транспортного средства 12 через посредство соответствующих GPS-устройств 48, 50 и 46. Должно быть понятно, что GPS-устройства 46, 48, 50 и 51 могут осуществлять связь любым известным способом глобального определения местоположения, например с помощью американской системы глобального определения местоположения, глобальной навигационной спутниковой системы «Галилео» или российской глобальной навигационной спутниковой системы «ГЛОНАСС».
[0029] Командный центр 44 системы дистанционного управления 10а выполнен с возможностью текущего контроля состояния и отслеживания местоположения переносного аварийного коммутатора 18, устройства дистанционного управления 14 и железнодорожного транспортного средства 12 через соответствующие GPS-устройства 50, 48 и 46. Командный центр 44 системы дистанционного управления 10a выполнен с возможностью хранения и отображения различного типа информации, относящейся к дистанционному управлению железнодорожным транспортным средством 12. Эта информация может быть получена от устройства дистанционного управления 14, первого контроллерного модуля 16 и/или переносного аварийного коммутатора 18. В качестве примера информации, которую может хранить и отображать командный центр 44, можно назвать оповещение об опасности с определением местонахождения, о том, какова поддерживаемая скорость железнодорожного транспортного средства, желаемая скорость локомотива, действительная скорость локомотива, давление в основном баке, состояние поездной тормозной системы, давление в поездной тормозной системе, состояние независимой тормозной системы, давление в независимой тормозной системе, показания амперметра локомотива, местоположение первого контроллерного модуля, местоположение переносных аварийных коммутаторов, команды, диагноз на простом языке и т.д. Кроме того, командный центр 44 выполнен с возможностью подачи сигнала тревоги в случае возникновения опасности. В качестве сигнала тревоги может использоваться звук колокола, звук горна, световой сигнал или их комбинация.
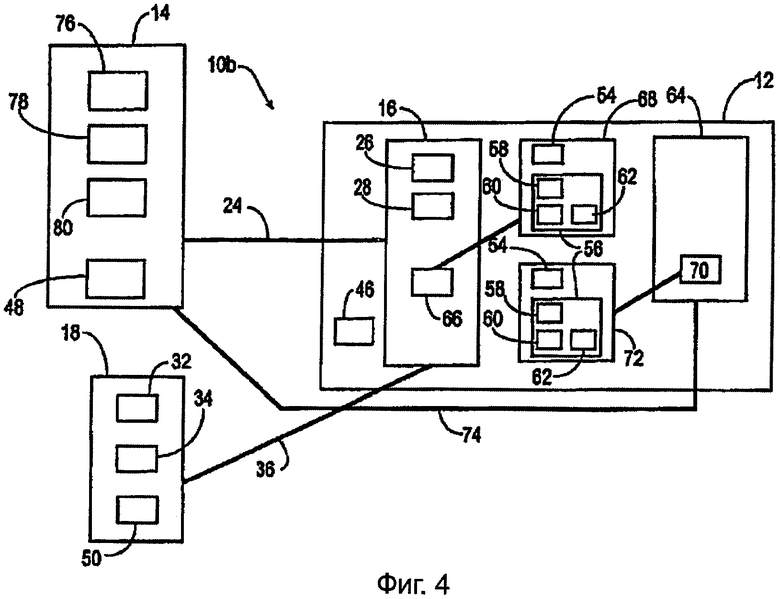
[0030] Обратимся теперь к фиг.4, на которой проиллюстрирован еще один вариант осуществления системы дистанционного управления согласно предлагаемому изобретению, которая обозначена позицией 10b. Система дистанционного управления 10b включает железнодорожное транспортное средство 12, устройство дистанционного управления 14, первый контроллерный модуль 16 и переносный аварийный коммутатор 18, описанный в настоящем описании при описании системы дистанционного управления 10. В рассматриваемом варианте осуществления предлагаемого изобретения железнодорожное транспортное средство 12 снабжено регулятором тяги 54, обеспечивающим для железнодорожного транспортного средства 12 тяговую мощность для его движения, и тормозной системой 56, обеспечивающей для железнодорожного транспортного средства 12 тормозную мощность для его остановки. Тормозная система 56 включает независимую тормозную систему 58, содержащую находящуюся под давлением тормозную текучую среду, давление которой поддается измерению, поездную тормозную систему 60, содержащую тормозную текучую среду, давление которой поддается измерению, и основной бак 62, содержащий тормозную текучую среду для подачи под давлением в независимую тормозную систему 58 и поездную тормозную систему 60, причем давление тормозной текучей среды в основном баке также поддается измерению. Должно быть понятно, что любое описываемое в настоящем описании железнодорожное транспортное средство 12 может быть снабжено чем-либо из следующего перечня: регулятором тяги 54, тормозной системой 56, независимой тормозной системой 58, поездной тормозной системой 60, основным баком 62, или же любой комбинацией из вышеперечисленного. Должно быть понятно также, под тормозной текучей средой в настоящем описании понимается любая жидкость или газ, за счет сжатия или разрежения которой может быть осуществлена остановка железнодорожного транспортного средства 12; в качестве такой тормозной текучей среды может быть использована, например, вода или воздух (далее по тексту - тормозная жидкость).
[0031] В варианте осуществления предлагаемого изобретения, проиллюстрированном на фиг.4, система дистанционного управления 10b дополнительно снабжена вторым контроллерным модулем 64, который установлен на железнодорожном транспортном средстве 12 аналогично первому контроллерному модулю 16. В рассматриваемом варианте осуществления предлагаемого изобретения первый контроллерный модуль 16 снабжен первым чувствительным элементом 66, который предназначен для текущего контроля состояния некоторого первого набора предварительно заданных параметров 68 железнодорожного транспортного средства 12, а второй контроллерный модуль 64 снабжен вторым чувствительным элементом 70, который предназначен для текущего контроля состояния некоторого второго набора предварительно заданных параметров 72 железнодорожного транспортного средства 12. Первый контроллерный модуль 16, установленный на железнодорожном транспортном средстве 12, осуществляет текущий контроль упомянутого первого набора предварительно заданных параметров 68 железнодорожного транспортного средства 12 с целью обеспечения безопасной работы железнодорожного транспортного средства 12. Второй контроллерный модуль 64 осуществляет текущий контроль упомянутого второго набора предварительно заданных параметров 72 железнодорожного транспортного средства 12 с целью более надежного обеспечения безопасной работы железнодорожного транспортного средства 12. Второй контроллерный модуль 64, установленный на железнодорожном транспортном средстве 12, работает аналогично первому контроллерному модулю 16, установленному на железнодорожном транспортном средстве 12. Второй контроллерный модуль 64, установленный на железнодорожном транспортном средстве 12, осуществляет связь с устройством дистанционного управления 14, например, по отдельной линии беспроводной связи 74. Должно быть понятно, что упомянутая отдельная линия беспроводной связи 74 работает аналогично ранее описанной в настоящем описании линии беспроводной связи 24.
[0032] Упомянутые первый набор предварительно заданных параметров 68 и второй набор предварительно заданных параметров 72 железнодорожного транспортного средства 12 могут содержать любые параметры железнодорожного транспортного средства 12, необходимые при управлении им. В качестве лишь некоторых примеров параметров первого и второго наборов предварительно заданных параметров 68, 72 можно назвать давление в основном баке 62 железнодорожного транспортного средства 12, давление в независимой тормозной системе 58 железнодорожного транспортного средства 12, давление в поездной тормозной системе 60, включающей железнодорожное транспортное средство 12, состояние регулятора тяги 54 железнодорожного транспортного средства 12 и т.д. Должно быть понятно, что предварительно заданные параметры первого и второго наборов предварительно заданных параметров 68, 72 железнодорожного транспортного средства 12 могут быть любыми известными среднему специалисту в данной отрасли параметрами, относящимися к работе железнодорожного транспортного средства 12 и управлению им.
[0033] Согласно одному из конкретных вариантов осуществления предлагаемого изобретения первый чувствительный элемент 66 первого контроллерного модуля 16 осуществляет текущий контроль давления тормозной жидкости, содержащейся в основном баке 62, и выходной сигнал первого чувствительного элемента 66 первого контроллерного модуля 16 передается на устройство дистанционного управления 14. Аналогично, второй чувствительный элемент 70 первого контроллерного модуля 64 осуществляет текущий контроль давления тормозной жидкости, содержащейся в независимой тормозной системе 58, и выходной сигнал второго чувствительного элемента 70 второго контроллерного модуля 64, характеризующий давление тормозной текучей среды, содержащейся в независимой тормозной системе 58, передается на устройство дистанционного управления 14. Регулятор тяги 54 железнодорожного транспортного средства 12 не может быть приведен в действие и обеспечить для железнодорожного транспортного средства 12 тяговую мощность, до тех пор пока давление тормозной жидкости, содержащейся в основном баке 62, выше некоторого предварительно заданного для основного бака уровня, а давление тормозной жидкости, содержащейся в независимой тормозной системе 58, ниже некоторого уровня, предварительно заданного для этой тормозной системы.
[0034] Согласно одному из вариантов осуществления предлагаемого изобретения если давление в основном баке 62 падает ниже 90 фунтов силы на квадратный дюйм (6,205 бар; 620,5 кПа), то будет светить предупредительный световой индикатор основного бака, и будет подаваться звуковой сигнал. Если давление тормозной текучей среды в основном баке 62 с самого начала ниже 90 фунтов силы на квадратный дюйм (6,205 бар; 620,5 кПа), то первый контроллерный модуль 16 не разрешит работу железнодорожного транспортного средства 12. Если давление в основном баке упадет ниже 90 фунтов силы на квадратный дюйм (6,205 бар; 620,5 кПа) во время работы, то первый контроллерный модуль 16 автоматически включит визуальную и звуковую сигнализацию, и соответствующие сигналы будут посланы на устройство дистанционного управления 14. Если это состояние длится дольше 10 c, то первый контроллерный модуль 16 сбрасывает тягу и останавливает локомотив, задействуя тормозную систему 56.
[0035] Если давление тормозной жидкости в поездной тормозной системе 60 ниже 85 фунтов силы на квадратный дюйм (5,861 бар; 586,1 кПа), то будет светить световой индикатор поездной тормозной системы 60. Если давление тормозной жидкости поездной тормозной системе 60 с самого начала ниже 85 фунтов силы на квадратный дюйм (5,861 бар; 586,1 кПа), то первый контроллерный модуль 16 и/или второй контроллерный модуль 64 не разрешит работу железнодорожного транспортного средства 12. Во время работы, однако, первый контроллерный модуль 16 и/или второй контроллерный модуль 64 сбрасывает тягу и останавливает железнодорожное транспортное средство 12, задействуя тормозную систему 56, если давление тормозной жидкости в поездной тормозной системе 60 упадет ниже 45 фунтов силы на квадратный дюйм (3,103 бар; 310,3 кПа).
[0036] Предусмотрен также световой индикатор независимой тормозной системы 58, который загорается всякий раз, когда давление тормозной жидкости в независимой тормозной системе 58 превышает больше, чем на 5 фунтов силы на квадратный дюйм (0,3447 бар; 34,47 кПа), что указывает на возможность неполного включения тормозов независимой тормозной системы 56.
[0037] Согласно еще одному варианту осуществления предлагаемого изобретения, проиллюстрированному на фиг.4, устройство дистанционного управления 14 системы дистанционного управления 10b дополнительно снабжено устройством распознавания наклона 76, которое предназначено для подачи на устройство дистанционного управления 14 предупредительного сигнала при превышающем некоторое предварительного заданное предельно допустимое значение отклонении устройства дистанционного управления 14 от практически горизонтального уровня, устройством детектирования вибраций 78, которое предназначено для подачи на устройство дистанционного управления 14 предупредительного сигнала при превышающем некоторое предварительно заданное предельно допустимое значение уровне вибраций устройства дистанционного управления 14 по сравнению с его стабильным состоянием, устройством детектирования ударных воздействий 80, которое предназначено для подачи на устройство дистанционного управления 14 предупредительного сигнала при превышающем некоторое предварительно заданное предельно допустимое значение уровне ударных воздействий на устройство дистанционного управления 14, или любой комбинацией из вышеперечисленных устройства распознавания наклона 76, устройства детектирования вибраций 78 и устройства детектирования ударных воздействий 80. При превышающем некоторое предварительного заданное предельно допустимое значение отклонении устройства дистанционного управления 14 от практически горизонтального уровня устройство распознавания наклона 76 подает на устройство дистанционного управления 14 предупредительный сигнал в течение некоторого предварительно заданного промежутка времени, прежде чем система дистанционного управления 10b перейдет в состояние отказа. Когда система дистанционного управления 10b переходит в состояние отказа, на первый контроллерный модуль 16 подается сигнал остановки с целью инициирования безопасной остановки железнодорожного транспортного средства 12. Потенциального состояния отказа, вызываемого устройством распознавания наклона 76, можно избежать путем отмены оператором устройства дистанционного управления 14 предупредительного сигнала, либо путем придания устройству дистанционного управления 14 практически горизонтального положения. Согласно одному из вариантов осуществления предлагаемого изобретения, при отклонении устройства дистанционного управления 14 от практически горизонтального положения на время дольше по меньшей мере двух секунд предупредительный сигнал подается на устройство дистанционного управления 14 в течение по меньшей мере четырех секунд, прежде чем система дистанционного управления 10b перейдет в состояние отказа.
[0038] Аналогично тому, как работает устройство распознавания наклона 76, устройство детектирования вибраций 78 подает предупредительный сигнал в течение некоторого предварительно заданного промежутка времени, прежде чем система дистанционного управления 10b перейдет в состояние отказа. Аналогично, состояния отказа, вызываемого устройством детектирования вибраций 78, можно избежать путем отмены оператором устройства дистанционного управления 14 предупредительного сигнала, либо путем придания устройству дистанционного управления 14 практически стабильного состояния. Согласно одному из вариантов осуществления предлагаемого изобретения, когда устройство дистанционного управления 14 испытывает вибрации, превышающие некоторый предельно допустимый уровень, в течение по меньшей мере двух секунд, предупредительный сигнал подается на устройство дистанционного управления 14 в течение по меньшей мере четырех секунд, прежде чем система дистанционного управления 10b перейдет в состояние отказа.
[0039] В дополнение к предупредительному сигналу, подаваемому системе дистанционного управления 10b при превышении некоторого предельно допустимого уровня ударных воздействий на устройство дистанционного управления 14, устройство детектирования ударных воздействий 80 подает на устройство дистанционного управления 14 второй предупредительный сигнал, генерируемый при превышении некоторого предварительно заданного второго уровня ударных воздействий на устройство дистанционного управления 14. Как только уровень ударных воздействий на устройство дистанционного управления 14 превысит упомянутый второй уровень, на устройство дистанционного управления 14 подается второй предупредительный сигнал в течение некоторого предварительно заданного промежутка времени, прежде чем система дистанционного управления 10b перейдет в состояние отказа. Этого состояния отказа можно избежать путем отмены оператором устройства дистанционного управления этого предупредительного сигнала. Должно быть понятно, что предупредительные сигналы от устройства распознавания наклона 76, устройства детектирования вибраций 78 или устройства детектирования ударных воздействий 80 могут иметь любую природу, они могут быть, например, звуковыми или визуальными, лишь бы было обеспечено надлежащее оповещение оператора устройства дистанционного управления 14.
[0040] Согласно еще одному варианту осуществления предлагаемого изобретения система дистанционного управления 10b переводится в состояние отказа при потере связи между устройством дистанционного управления 14 и первым контроллерным модулем 16 (и вторым контроллерным модулем 64, если таковой имеется) в течение промежутка времени, превышающего некоторое предварительно заданное предельно допустимое значение. Согласно одному варианту осуществления предлагаемого изобретения система дистанционного управления 10b переводится в состояние отказа при потере связи между устройством дистанционного управления 14 и первым контроллерным модулем 16 (и вторым контроллерным модулем 64, если таковой имеется) в течение промежутка времени дольше пяти секунд.
[0041] Если система дистанционного управления 10b переходит в состояние отказа, и управление железнодорожным транспортным средством 12 прерывается, то прежде чем оператор устройства дистанционного управления сможет восстановить управление железнодорожным транспортным средством 12, могут понадобиться некоторые действия. Некоторые из действий по восстановлению управления железнодорожным транспортным средством 12 могут быть проделаны на устройстве дистанционного управления 14, в то время как другие действия должны быть проделаны на первом контроллерном модуле 16 и/или железнодорожном транспортном средстве 12. Дальнейшую информацию по состояниям отказа и восстановлению управления железнодорожным транспортным средством 12 можно найти в документе EN50239 (Железнодорожная аппаратура. Система дистанционного управления по радио тяговым транспортным средством для грузовых перевозок).
[0042] Согласно одному из вариантов осуществления предлагаемого изобретения устройство дистанционного управления 14 является переносным устройством, выполненным с возможностью его ношения человеком-оператором, находящимся на определенном расстоянии от железнодорожного транспортного средства 12. Неограничивающий конкретный пример физической реализации устройства дистанционного управления 14 проиллюстрирован на фиг.5. Устройство дистанционного управления 14, которое можно видеть на фиг.5, выполнено в виде переносного блока, имеющего корпус 80, в котором заключены электронные схемы, батарея для обеспечения электрического питания (не показана) и широкоформатный видеодисплей 82, предназначенный для отображения в режиме реального времени информации о железнодорожном транспортном средстве 12, предоставляемой через посредство первого контроллерного модуля 16. Упомянутый широкоформатный видеодисплей 82 может быть видеодисплеем любого типа, лишь бы он обеспечивал отображение в режиме реального времени информации, предоставляемой устройству дистанционного управления 14 от первого контроллерного модуля 16. В качестве лишь некоторых примеров могут быть названы такие типы видеодисплеев, как катодно-лучевая трубка, бистабильный дисплей, дисплей типа «электронный документ», электрофоретический дисплей, знаковый индикатор тлеющего разряда, электролюминесцентный дисплей, плазменная дисплейная панель, дисплей на светоизлучающих диодах, дисплей на жидких кристаллах, вакуумный люминесцентный индикатор, высокопроизводительный адресующий дисплей, тонкопленочный транзисторный дисплей, дисплей на органических светоизлучающих диодах, дисплей-эмиттер электронов с поверхностной проводимостью, лазерный телевизионный дисплей, дисплей на угольных нанотрубках, нанокристаллический дисплей и др. Широкоформатный видеодисплей 82 может иметь любые размеры, лишь бы отображаемая в режиме реального времени информация могла быть распознана оператором устройства дистанционного управления 14. Согласно одному из вариантов осуществления предлагаемого изобретения у широкоформатного видеодисплея 82 размер экрана по диагонали больше, чем приблизительно 2,5 дюйма (6,35 см). Согласно другому варианту осуществления предлагаемого изобретения у широкоформатного видеодисплея 82 размер экрана по диагонали больше, чем приблизительно 3,5 дюйма (8,89 см). Согласно еще одному варианту осуществления предлагаемого изобретения у широкоформатного видеодисплея 82 размер экрана по диагонали больше, чем приблизительно 5 дюймов (12,70 см). Согласно еще одному варианту осуществления предлагаемого изобретения у широкоформатого видеодисплея 82 размер экрана по диагонали больше, чем приблизительно 7 дюймов (17,78 см).
[0043] Согласно любому из описанных в настоящем описании вариантов осуществления предлагаемого изобретения широкоформатный видеодисплей 82 может быть оснащен сенсорным экраном, который предоставляет оператору возможность подавать исполнимые команды для их передачи от устройства дистанционного управления 14 на первый контроллерный модуль 16 для их исполнения железнодорожным транспортным средством 12. Широкоформатный видеодисплей 82 может быть оснащен экраном любого типа, способным функционировать как сенсорный экран. В качестве лишь некоторых примеров подходящих сенсорных элементов можно назвать резисторный сенсорный экран, инфракрасный сенсорный экран, сенсорный экран с поверхностной акустической волной, емкостной сенсорный экран, тензорезисторный сенсорный экран с формированием оптического изображения, сенсорный экран с рассеянным сигналом, сенсорный экран с распознаванием акустических импульсов, сенсорный экран с нарушенным полным внутренним отражением и др. Кроме того, с целью улучшения видимости отображаемой на нем информации широкоформатный видеодисплей 82 может быть снабжен подсветкой.
[0044] Кроме широкоформатного видеодисплея 82 устройство дистанционного управления 14 снабжено рукоятками 83a, 83b, расположенными по обе стороны от широкоформатного видеодисплея 82 и выполненными с возможностью для оператора манипулировать ими с целью ввода командных сигналов. А именно, манипулируя рукояткой 83a, расположенной слева от широкоформатного видеодисплея 82, оператор может привести в действие поездную тормозную систему 60 железнодорожного транспортного средства 12. Аналогичная рукоятке 83a рукоятка 83b расположена справа от широкоформатного видеодисплея 82, и посредством этой рукоятки оператор может управлять независимой тормозной системой 58 и регулятором тяги 54 железнодорожного транспортного средства 12. Должно быть понятно, что устройство дистанционного управления 14 может быть снабжено любым количеством рукояток для осуществления любой функции рассматриваемого здесь железнодорожного транспортного средства 12. Кроме того, устройство дистанционного управления 14 снабжено некоторой совокупностью управляющих органов 84, предназначенных для обеспечения различных других команд устройства дистанционного управления 14. Управляющие органы 84 могут быть выполнены в виде ручек, кнопок, рукояток, тумблеров и т.п. управляющих органов известных типов для инициирования сигнала и/или команды. В качестве лишь некоторых примеров других сигналов и/или команд могут быть названы команды включения/выключения, активации звонка или звука рожка, реверса, перенастройки схемы аварийной защиты и т.п. Устройству дистанционного управления 14 придана также функция аварийной остановки, и оно снабжено выключателем аварийной остановки 86 для передачи сигнала аварийной остановки на первый контроллерный модуль 16 с целью скорого и надежного приведения железнодорожного транспортного средства 12 в состояние полной остановки. Выключатель аварийной остановки 86 на устройстве дистанционного управления 14 может быть реализован на выключателе любого типа, лишь бы он обеспечивал возможность приведения его в действие оператором устройства дистанционного управления 14, это может быть кнопка, тумблер и т.п.
[0045] Системе дистанционного управления 10 и, таким образом, устройству дистанционного управления 14 выделена некоторая совокупность радиочастот, на которых могут работать система дистанционного управления 10 и устройство дистанционного управления 14. Согласно одному из вариантов осуществления предлагаемого изобретения система дистанционного управления 10 может работать на двух разных радиочастотах, выбранных из упомянутой совокупности радиочастот, на которых может работать система дистанционного управления 10. Сортировочные станции и маневровые парки, где применяется система дистанционного управления 10, могут иметь лицензию на использование конкретной радиочастоты и могут пользоваться этой радиочастотой в пределах сортировочной станции или маневрового парка и определенной зоны вокруг. При выходе железнодорожного транспортного средства за пределы этой зоны сразу же должна использоваться отдельная радиочастота. Предлагаемое изобретение может быть осуществлено таким образом, что система дистанционного управления 10 может работать на конкретной радиочастоте, на которую имеет лицензию сортировочная станция или маневровый парк, и незаметно для оператора переходит на отдельную радиочастоту за пределами зоны сортировочной станции или маневрового парка. Упомянутые две разные радиочастоты могут быть выбраны вручную любым оператором при осуществлении системы дистанционного управления 10 согласно предлагаемому изобретению. Согласно другому варианту осуществления предлагаемого изобретения система дистанционного управления 10 выполнена с возможностью автоматического выбора радиочастот из совокупности радиочастот, при которых может работать система дистанционного управления 10, в соответствии с местонахождением, определяемым с помощью GPS-устройства 46 железнодорожного транспортного средства 12 и GPS-устройства 48 устройства дистанционного управления 14. В качестве лишь некоторых примеров диапазонов радиочастот можно назвать диапазоны 419-480 МГц, 865,5-867,6 МГц, 902-928 МГц, 952-954 МГц, 2,4-2,6 ГГц и их комбинации. Должно быть понятно, что система дистанционного управления 10 и устройство дистанционного управления 14 могут быть осуществлены с возможностью работы на любой радиочастоте, на которой возможен перенос сигналов, необходимых для функционирования системы дистанционного управления 10.
[0046] Как можно видеть на фиг.6A-фиг.6D, широкоформатный видеодисплей 82 устройства дистанционного управления 14 имеет различные экранные функции. На фиг.6A показан экран управления движением 88, на фиг.6B показан GPS-экран 90, на фиг.6С показан экран передачи управления 92, а на фиг.6D показан экран перенятия управления 94. Экран управления движением 88 может предоставлять любую информацию, необходимую для оператора устройства дистанционного управления 14 для текущего контроля движения железнодорожного транспортного средства 12 и управления функциями железнодорожного транспортного средства 12. В качестве лишь некоторых примеров информации, предоставляемой экраном управления движением 88, можно назвать информацию о направлении движения, информацию о скорости, о том, какое давление в основном баке, давление в поездной тормозной системе, давление в тормозной системе локомотива, количество топлива для железнодорожного транспортного средства 12 и т.п. Экран управления движением 88 снабжен также функциями сенсорного экрана, такими как звонок, звук рожка, GPS для переключения широкоформатного видеодисплея 82 на GPS-экран 90, переключение освещения и т.п. Должно быть понятно, что экран управления движением 88 может быть снабжен любым количеством исполнимых сенсорных экранных кнопок с целью обеспечения возможности надежного и эффективного текущего контроля движения и функций железнодорожного транспортного средства 12.
[0047] GPS-экран 90 устройства дистанционного управления 14 отображает карту 96 зоны, в которой осуществляется система дистанционного управления 10. Карта 96 GPS-экрана 90 указывает местоположение железнодорожного транспортного средства 12, оператора устройства дистанционного управления 14 и любых переносных аварийных коммутаторов 18, используемых в данном варианте осуществления предлагаемого изобретения. Железнодорожное транспортное средство 12, устройство дистанционного управления 14 и переносный аварийный коммутатор 18 отображаются на этом экране через посредство GPS-устройства 46 железнодорожного транспортного средства 12, через посредство GPS-устройства 48 устройства дистанционного управления 14 и через посредство GPS-устройства 50 переносного аварийного коммутатора 18, соответственно. GPS-экран 90 снабжен также некоторой совокупностью исполнимых сенсорных экранных кнопок для предоставления оператору устройства дистанционного управления 14 возможности управления любыми желаемыми функциями железнодорожного транспортного средства 12. GPS-экран 90 выполнен также с возможностью отображения скорости и направления перемещения железнодорожного транспортного средства 12.
[0048] Изображенные на фиг.6C и фиг.6D, соответственно, экран передачи управления 92 и экран перенятия управления 94 используются для передачи и перенятия дистанционного управления железнодорожным транспортным средством 12. И на экране передачи управления 92, и на экране перенятия управления 94 отображаются скорость и направление перемещения железнодорожного транспортного средства 12. Экран передачи управления 92 отображается на устройстве дистанционного управления 14, которое находится у оператора, на текущий момент времени отвечающего за управление железнодорожным транспортным средством 12. Что же касается экрана перенятия управления 94, то он отображается на отдельном устройстве дистанционного управления 14, которое находится у оператора, готовящегося перенять управление железнодорожным транспортным средством 12. Экран передачи управления 92 имеет перечень 98 активных устройств дистанционного управления, способных брать на себя управление железнодорожным транспортным средством 12, и набор функций передачи управления 100, доступных для оператора устройства дистанционного управления 14 для передачи управления железнодорожным транспортным средством 12 другому оператору другого устройства дистанционного управления 14. Упомянутые перечень 98 активных устройств дистанционного управления и набор функций передачи управления 100 на экране передачи управления 92 реализованы в виде исполнимых сенсорных экранных кнопок, выполненных с возможностью инициирования их оператором устройства дистанционного управления 14 путем нажатия кнопки на широкоформатном видеодисплее 82. Экран перенятия управления 94 имеет второй перечень 102 активных устройств дистанционного управления, способных передавать управление железнодорожным транспортным средством 12, и набор функций перенятия управления 104, предоставляющих исполнимые функции оператору устройства дистанционного управления, перенимающему управление железнодорожным транспортным средством 12.
[0049] Во время работы экран передачи управления 92 и экран перенятия управления 94 скоординированы для передачи и перенятия управления железнодорожным транспортным средством 12. Выбирается некоторое первое устройство дистанционного управления 14, осуществляющее управление железнодорожным транспортным средством 12. Это первое устройство дистанционного управления 14 имеет широкоформатный видеодисплей 46, у которого выбран экран передачи управления 92, с предоставлением, тем самым, перечня 98 активных устройств дистанционного управления, для которых может быть осуществлена передача дистанционного управления железнодорожным транспортным средством 12. Затем из перечня 98 доступных устройств дистанционного управления выбирается второе устройство дистанционного управления 14, которому желательно передать управление железнодорожным транспортным средством 12. Как только второе устройство дистанционного управления 14 выбрано, на первый контроллерный модуль 16 (или на второй контроллерный модуль 64), установленный на железнодорожном транспортном средстве 12, от первого устройства дистанционного управления 14, которому на текущий момент принадлежит право принимать решения в отношении железнодорожного транспортного средства 12, подается запрос передачи управления. После подачи запроса на передачу управления подтверждение приема этого запроса передачи управления передается от второго устройства дистанционного управления 14 через первый контроллерный модуль 16 на первое устройство дистанционного управления. Наконец, подтверждение передачи управления передается от первого устройства дистанционного управления 14 на второе устройство дистанционного управления, при этом второе устройство дистанционного управления 14 перенимает от первого устройства дистанционного управления 14 право принимать решения в отношении железнодорожного транспортного средства 12. Как только подтверждение передачи управления произошло, второе устройство дистанционного управления 14 генерирует второй сигнал о праве принимать решения в отношении железнодорожного транспортного средства 12, который принимается первым контроллерным модулем 16 железнодорожного транспортного средства 12.
[0050] Согласно одному из вариантов осуществления предлагаемого изобретения система дистанционного управления 10 используется для поддержания желаемой скорости железнодорожного транспортного средства 12. Пользователь устройства дистанционного управления 14 передает сигнал на первый контроллерный модуль 16, так чтобы для железнодорожного транспортного средства 12 была обеспечена тяговая мощность для перемещения железнодорожного транспортного средства 12 в заданном направлении. После того как железнодорожное транспортное средство 12 начнет движение, установленное на нем GPS-устройство 46 определяет его местоположение и скорость. Оператор устройства дистанционного управления 14 осуществляет текущий контроль скорости железнодорожного транспортного средства 12, пока эта скорость не достигнет желаемого значения. Как только скорость железнодорожного транспортного средства 12 согласно информации от установленного на нем GPS-устройства достигает значения, желаемого оператором устройства дистанционного управления 14, и эта информация передана на устройство дистанционного управления 14, оператор устройства дистанционного управления 14 выполняет на устройстве дистанционного управления 14 команду крейсирования, обеспечивающую поддержание скорости железнодорожного транспортного средства 12 на достигнутом уровне. Упомянутая команда крейсирования может подаваться любого типа выключателем или кнопкой на устройстве дистанционного управления 14 или на широкоформатном видеодисплее 82 устройства дистанционного управления 14.
[0051] Предлагаемое изобретение направлено также на способы управления железнодорожным транспортным средством 12 с использованием системы дистанционного управления 10. Согласно одному из вариантов осуществления предлагаемого изобретения предусмотрено устройство дистанционного управления 14, и это устройство дистанционного управления 14 снабжено большим видеодисплеем 82, предназначенным для предоставления в режиме реального времени информации о железнодорожном транспортном средстве 12 и обеспечения командных функций для железнодорожного транспортного средства 12. Предусмотрен также первый контроллерный модуль 16, соединенный с железнодорожным транспортным средством 12 и находящийся в связи с устройством дистанционного управления 14. От устройства дистанционного управления 14 командный сигнал передается на первый контроллерный модуль 16. Этот командный сигнал, переданный от устройства дистанционного управления 14, принимается первым контроллерным модулем 16 для управления первым набором предварительно заданных параметров 68 железнодорожного транспортного средства 12. Упомянутый первый набор предварительно заданных параметров 68 железнодорожного транспортного средства 12 подвергается текущему контролю со стороны устройства дистанционного управления 14 через посредство первого контроллерного модуля 16. Наконец, устройство дистанционного управления 14 снабжается от первого контроллерного модуля 16 в режиме реального времени информацией, которая отображается на широкоформатном видеодисплее 82 устройства дистанционного управления 14.
[0052] Согласно одному из вариантов осуществления предлагаемого изобретения предусматривается способ поддержания скорости железнодорожного транспортного средства на заданном уровне. Имеется устройство дистанционного управления 14, предназначенное для передачи сигналов для управления железнодорожным транспортным средством 12. Имеется первый контроллерный модуль 16, соединенный с железнодорожным транспортным средством 12 и находящийся в связи с устройством дистанционного управления 14. Имеется также переносный аварийный коммутатор 18, который находится в связи с первым контроллерным модулем 16 для подачи на первый контроллерный модуль сигнала остановки для остановки железнодорожного транспортного средства 12. При наличии устройства дистанционного управления 14, первого контроллерного модуля 16 и переносного аварийного коммутатора 18 от устройства дистанционного управления 14 на первый контроллерный модуль 16 передается командный сигнал для управления первым набором предварительно заданных параметров 68 железнодорожного транспортного средства 12. Наконец, первый набор предварительно заданных параметров 68 железнодорожного транспортного средства 12 подвергается текущему контролю со стороны первого контроллерного модуля 16.
[0053] Согласно другому варианту осуществления предлагаемого изобретения предусматривается способ поддержания скорости железнодорожного транспортного средства на заданном уровне. Имеется устройство дистанционного управления 14, предназначенное для передачи сигналов для управления железнодорожным транспортным средством 12. Способом предусматривается также наличие первого контроллерного модуля 16, который соединен с железнодорожным транспортным средством 12 и находится в связи с устройством дистанционного управления 14. Кроме того, способом предусматривается наличие GPS-устройства 46, соединенного с железнодорожным транспортным средством 12, находящегося в связи с первым контроллерным модулем 16 и предназначенного для определения местоположения и скорости железнодорожного транспортного средства 12. При наличии устройства дистанционного управления 14, первого контроллерного модуля 16 и GPS-устройства 46 от устройства дистанционного управления 14 на регулятор тяги 54 через посредство первого контроллерного модуля 16 передается сигнал на приведение железнодорожного транспортного средства 12 в движение в заданном направлении. После приведения железнодорожного транспортного средства 12 в движение информация о его местоположении и скорости, определенных GPS-устройством 46, передается на устройство дистанционного управления 14 через посредство первого контроллерного модуля 16. Наконец, от устройства дистанционного управления 14 на первый контроллерный модуль 16 передается сигнал на поддержание скорости железнодорожного транспортного средства на заданном уровне, как только эта заданная скорость железнодорожного транспортного средства 12 достигнута согласно информации GPS-устройства 46.
[0054] Согласно еще одному варианту осуществления предлагаемого изобретения устройство дистанционного управления 14 может быть дополнительно снабжено удаляемой программной кнопкой. Эта удаляемая программная кнопка может хранить все программное обеспечение и установки для устройства дистанционного управления 14 для любых предварительно заданных рабочих параметров системы дистанционного управления 10. Удаляемая программная кнопка может быть удалена с одного устройства дистанционного управления 14 и перенесена на другое устройство дистанционного управления 14, при этом это другое устройство дистанционного управления 14 снабжено программным обеспечением и установками для устройства дистанционного управления 14 для предварительно заданных рабочих параметров системы дистанционного управления 10.
[0055] Должно быть понятно, что система дистанционного управления 10, устройство дистанционного управления 14 и контроллерные модули 16 и 64 могут быть запрограммированы на работу любым желаемым образом физическим или юридическим лицом, желающим осуществить любой из вариантов системы дистанционного управления 10, описанных в данном описании, с использованием различных установочных интерфейсов, таких как H-Link, порт USB (USB - аббревиатура от Universal Series Bus - универсальная последовательная шина) и/или широкоформатный видеодисплей 82. Должно быть понятно также, что система дистанционного управления 10, устройство дистанционного управления 14 и контроллерные модули 16 и 64 могут быть построены таким образом, чтобы они соответствовали любым рабочим стандартам EN 50125-1 (Железнодорожные применения. Требования к оборудованию с точки зрения охраны окружающей среды. Оборудование железнодорожного подвижного состава), EN 50126 (Железнодорожные применения. Определение и демонстрация надежности, эксплуатационной готовности, ремонтопригодности и безопасности), EN 50128 (Железнодорожные применения. Связь, сигнализация и системы обработки данных. Программное обеспечение для железнодорожных систем управления и защиты), EN 50129 (Железнодорожные применения. Связь, сигнализация и системы обработки данных. Электронные системы сигнализации для систем безопасности), EN 50159-1 (Железнодорожные применения. Связь, сигнализация и системы обработки данных. Связь в закрытых системах сообщения для систем безопасности), EN 50159-2 (Железнодорожные применения. Связь, сигнализация и системы обработки данных. Связь в открытых системах сообщения для систем безопасности), EN 50239 (Железнодорожные применения. Система дистанционного управления по радио тяговыми транспортными средствами для грузовых перевозок), EN 60870-5-1 (Оборудование и системы телеконтроля. Протоколы сообщения. Рамочные форматы сообщения), EN 61508 (Функциональная безопасность электрических, электронных, программируемых электронных систем безопасности) и EN 50325-4 (Субсистема промышленной связи на основе ISO 11898 (CAN) для интерфейсов контроллер-устройство. Протокол CANopen).
[0056] Согласно еще одному варианту осуществления предлагаемого изобретения в устройстве дистанционного управления 14 в дополнение к любым и всем другим признакам может быть использована гаптическая технология с целью обеспечения обратной связи от оборудования, предоставления рабочего состояния (например, отсутствие или наличие отказа), обеспечения поддержки для интуитивного оперирования, а также смягчение факторов окружающей среды, отвлекающих внимание (таких как шум, резкий свет и т.д.). В качестве лишь некоторых примеров гаптической технологии могут быть названы программируемые поворотные органы управления, сенсорные экраны, сенсорные панели, координатные манипуляторы, органы управления типа «джойстик» и т.д.
[0057] Еще один конкретный неограничивающий пример физического осуществления предлагаемого изобретения проиллюстрирован на фиг.7. Устройство дистанционного управления 14a, изображенное на фиг.7, выполнено в виде переносного блока, имеющего корпус 81a, в котором заключены электронные схемы, батарея, обеспечивающая электрическое питание (не показана), и широкоформатный видеодисплей 82a для отображения в режиме реального времени информации о железнодорожном транспортном средстве 12, предоставляемой через посредство первого контроллерного модуля 16. Упомянутый широкоформатный видеодисплей 82a может быть видеодисплеем любого типа, лишь бы он обеспечивал отображение в режиме реального времени информации, предоставляемой устройству дистанционного управления 14a от первого контроллерного модуля 16. В качестве лишь некоторых примеров могут быть названы такие типы видеодисплеев, как катодно-лучевая трубка, бистабильный дисплей, дисплей типа «электронный документ», электрофоретический дисплей, знаковый индикатор тлеющего разряда, электролюминесцентный дисплей, плазменная дисплейная панель, дисплей на светоизлучающих диодах, дисплей на жидких кристаллах, вакуумный люминесцентный индикатор, высокопроизводительный адресующий дисплей, тонкопленочный транзисторный дисплей, дисплей на органических светоизлучающих диодах, дисплей-эмиттер электронов с поверхностной проводимостью, лазерный телевизионный дисплей, дисплей на угольных нанотрубках, нанокристаллический дисплей и др. Широкоформатный видеодисплей 82a может иметь любые размеры, лишь бы отображаемая в режиме реального времени информация могла быть распознана оператором устройства дистанционного управления 14a. Согласно одному из вариантов осуществления предлагаемого изобретения у широкоформатного видеодисплея 82a размер экрана по диагонали больше, чем приблизительно 2,5 дюйма (6,35 см). Согласно другому варианту осуществления предлагаемого изобретения у широкоформатного видеодисплея 82a размер экрана по диагонали больше, чем приблизительно 3,5 дюйма (8,89 см). Согласно еще одному варианту осуществления предлагаемого изобретения у широкоформатного видеодисплея 82a размер экрана по диагонали больше, чем приблизительно 5 дюймов (12,70 см). Согласно еще одному варианту осуществления предлагаемого изобретения у широкоформатного видеодисплея 82a размер экрана по диагонали больше, чем приблизительно 7 дюймов (17,78 см).
[0058] В любом из описываемых здесь вариантов осуществления предлагаемого изобретения в устройстве дистанционного управления 14a может быть использована гаптическая технология в любой форме. Устройство дистанционного управления 14a, изображенное на фиг.7, снабжено гаптическим программируемым вращаемым органом управления 110 и гаптическим джойстиком 112. На фиг.7 показан только один гаптический программируемый вращаемый орган управления 110 и гаптический джойстик 112, однако должно быть понятно, что предлагаемое изобретение не ограничивается только одним гаптическим программируемым вращаемым органом управления 110 и одним гаптическим джойстиком 112. Таким образом, в устройствах дистанционного управления 14 и 14a гаптическая технология может не использоваться вовсе, или же могут иметь по одному или более чем одному гаптическому программируемому вращаемому органу управления 110 и одному или более чем одному гаптическому джойстику 112. Путем программирования гаптическому программируемому вращаемому органу управления 110 и гаптическому джойстику 112 могут быть приданы любые функции, необходимые для управления данной системой, используемой для дистанционного управления железнодорожным транспортным средством.
[0059] Согласно еще одному варианту осуществления предлагаемого изобретения в любом варианте устройства дистанционного управления 14a может быть использована тактильно-сенсорная технология, обеспечивающая восприятие физического контакта оператора с определенной зоной устройства дистанционного управления 14a, при этом упомянутая определенная зона устройства дистанционного управления 14a связана с заданной функцией железнодорожного транспортного средства 12. В качестве неограничивающего примера тактильно-сенсорной технологии можно назвать тактильно-сенсорную технологию, предоставляемую компанией «Метод Электронике, Инк.» (Methode Electronics, Inc.). Должно быть понятно, что в устройстве дистанционного управления 14a может быть использована тактильно-сенсорная технология любого типа, известного в данной отрасли, лишь бы она могла быть реализована на устройстве дистанционного управления 14a. Тактильно-сенсорная технология реализуется на устройстве дистанционного управления 14a с целью придания устройству дистанционного управления 14a возможности долговременного и надежного управления функциями, которые возложены на устройство дистанционного управления 14a.
[0060] В одном из иллюстративных примеров осуществления предлагаемого изобретения на фиг.7 показано также устройство дистанционного управления 14a, снабженное ручками 113a и 113b. В ручке 113a и/или ручке 113b может быть использована сенсорная технология, благодаря которой осуществляется детектирование контакта оператора с одной из этих ручек 113a, 113b или с обоими. Используемая в ручке 113a и/или ручке 113b сенсорная технология блокирует работу устройства дистанционного управления 14a, если соответствующая ручка (или обе) не находится в контакте с оператором. И наоборот, сенсорная технология разрешает работу устройства дистанционного управления 14a, когда обеспечен соответствующий контакт с оператором (или удержание соответствующей ручки или обеих ручек оператором).
[0061] Кроме того, на фиг.7 проиллюстрирован еще один вариант осуществления предлагаемого изобретения. Устройство дистанционного управления 14a может находиться в связи с видеокамерой (не показана), обеспечивающей передачу на устройство дистанционного управления 14a неподвижного или движущегося изображения 114, которое по команде оператора может быть отображено на средстве визуального отображения, которым снабжено устройство дистанционного управления 14a. Упомянутая видеокамера может быть размещена в любом предварительно выбранном месте, так чтобы пользователь мог видеть в нужном ракурсе управляемое железнодорожное транспортное средство 12. При таком решении обеспечивается обратная связь для оператора, который получает возможность убедиться в том, что его команды выполняются. Видеокамера может быть любого типа, лишь бы обеспечивалась возможность передавать неподвижные и/или движущиеся изображения. Связь между устройством дистанционного управления 14a и видеокамерой может быть установлена с помощью любых средств, лишь бы обеспечивалась возможность передачи информации от видеокамеры на устройство дистанционного управления 14a, - это может быть проводная линия связи или беспроводная линия связи. Беспроводная линия связи между видеокамерой и устройством дистанционного управления 14a может представлять собой любую подходящую линию связи, лишь бы она обеспечивала возможность передачи желаемой информации между устройством дистанционного управления 14a и видеокамерой, это может быть радиочастотный канал связи, канал микроволновой связи, канал связи посредством инфракрасного излучения, канал спутниковой связи и т.д.
[0062] В дополнение к гаптической технологии и всем другим функциям, описанным выше, в устройстве дистанционного управления 14a может быть использована технология верификации (установления подлинности) для аутентификации и идентификации оператора. В качестве технологии установления подлинности может быть использована любая известная технология этого рода, лишь бы она обеспечивала аутентификацию и идентификацию оператора. В качестве одного неограничивающего примера можно назвать технологию биометрической верификации. Технология верификации включает систему оповещения для оповещения оператора, пытающегося осуществить дистанционное управление железнодорожным транспортным средством 12, о том, аутентифицирован и идентифицирован ли он. При использовании технологии биометрической верификации возникают некоторые проблемы. Для преодоления проблем, связанных с использованием технологии биометрической верификации, в предлагаемом изобретении технология биометрической верификации дополняется мульти-спектральным отображением с целью получения более надежной и достоверной технологии биометрической верификации. В качестве лишь некоторых примеров биометрически верифицируемых данных можно назвать отпечатки пальцев, голос, глаза и т.д. На фиг.8 показана часть устройства дистанционного управления 14a, имеющего панель биометрической верификации 116, выполненную с возможностью верификации отпечатков пальцев оператора. В дополнение к панели биометрической верификации 116 устройство дистанционного управления 14a содержит панель оповещения о результате верификации 118, предназначенную для оповещения оператора, пытающегося осуществить дистанционное управление железнодорожным транспортным средством 12, о том, идентифицирован ли он и/или допущен ли он к использованию устройства дистанционного управления 14a. Должно быть понятно, что хотя здесь описывается и на фиг.8 иллюстрируется технология биометрической верификации конкретно по отпечаткам пальцев, предлагаемое изобретение не ограничивается биометрической верификацией только по отпечаткам пальцев и тем более только тем вариантом технологии биометрической верификации по отпечаткам пальцев, который здесь описан. Должно быть понятно также, что в предлагаемом изобретении может быть использована технология биометрической верификации любого типа любым способом, известным среднему специалисту соответствующего профиля.
0063] Из вышеприведенного описания понятно, что предлагаемое изобретение хорошо приспособлено для достижения целей и обеспечения преимуществ как описанных в настоящем описании, так и неотъемлемых от сути предлагаемого изобретения. Для целей раскрытия предлагаемого изобретения в настоящем описании были описаны варианты осуществления предлагаемого изобретения, представляющиеся на данный момент предпочтительными, однако должно быть понятно, что возможны различные модификации, которые очевидны для специалиста в данной отрасли и соответствуют духу предлагаемого изобретения, выраженному в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2009 |
|
RU2527936C2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЛОКОМОТИВОМ | 2004 |
|
RU2374113C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2019 |
|
RU2795911C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2019 |
|
RU2795181C1 |
| СПОСОБ И УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2019 |
|
RU2795171C1 |
| ПОРТАТИВНЫЙ АДАПТЕР И ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ ДЛЯ ИСПОЛЬЗОВАНИЯ С МОДУЛЕМ ДИСПЛЕЯ ТИПА "HEADS-UP" | 2006 |
|
RU2417411C2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2020 |
|
RU2737080C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2828680C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС МНОГОКАНАЛЬНОЙ ДИАГНОСТИКИ И МОНИТОРИНГА ДЛЯ ДИСТАНЦИОННЫХ ИССЛЕДОВАНИЙ ПАЦИЕНТОВ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2018 |
|
RU2683898C1 |
| МОБИЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС СВЯЗИ | 2020 |
|
RU2749879C1 |
Изобретение относится к системе дистанционного управления железнодорожным транспортным средством. Технический результат заключается в повышении безопасности системы дистанционного управления, а именно в блокировании работы локомотива по командам от устройства дистанционного управления, которое еще не взяли в руку или которое уронили, т.е. с которым нет контакта оператора. Предлагаемая система дистанционного управления содержит устройство дистанционного управления, в котором использована гаптическая технология, выполненное с возможностью передачи сигналов на первый контроллерный модуль. Упомянутый первый контроллерный модуль установлен на железнодорожном транспортном средстве и выполнен с возможностью управления железнодорожным транспортным средством и осуществления текущего контроля его функций. Первый контроллерный модуль выполнен также с возможностью передачи информации на устройство дистанционного управления. Предлагаемая система дистанционного управления может также содержать переносный аварийный коммутатор, обеспечивающий для всякого индивидуума, находящегося вблизи железнодорожного транспортного средства, возможность передачи на первый контроллерный модуль сигнала остановки для остановки железнодорожного транспортного средства при возникновении опасной ситуации. 2 н. и 12 з.п. ф-лы, 11 ил.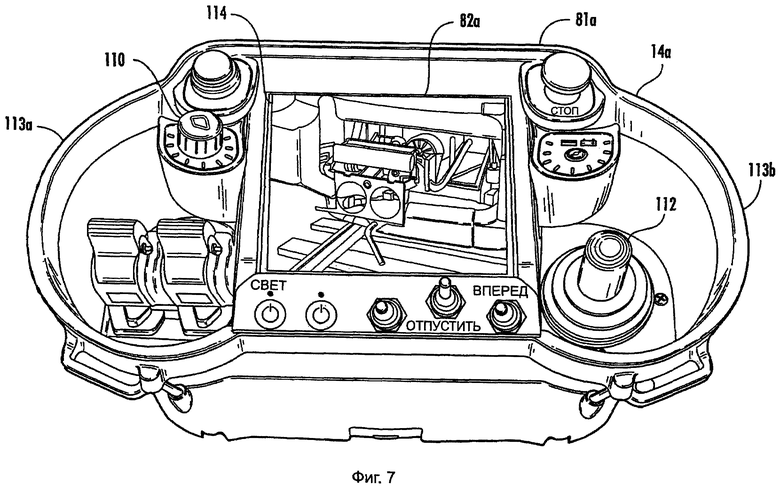
1. Система дистанционного управления для управления железнодорожным транспортным средством, включающим регулятор тяги для обеспечения тяговой мощности с целью приведения железнодорожного транспортного средства в движение и тормозную систему для обеспечения тормозной мощности для железнодорожного транспортного средства, при этом система дистанционного управления содержит
устройство дистанционного управления, предназначенное для передачи командных сигналов, выполненное с использованием гаптической технологии и содержащее по меньшей мере одну ручку, выполненную с использованием тактильно-сенсорной технологии и обеспечивающую блокирование работы устройства дистанционного управления, если указанная по меньшей мере одна ручка не находится в контакте с оператором, и разрешающую работу устройства дистанционного управления при наличии соответствующего контакта с оператором, и
первый контроллерный модуль, соединенный с железнодорожным транспортным средством и находящийся в связи с упомянутым устройством дистанционного управления, при этом упомянутый первый контроллерный модуль выполнен с возможностью осуществления текущего контроля набора предварительно заданных параметров железнодорожного транспортного средства, приема упомянутых командных сигналов от устройства дистанционного управления для управления упомянутым набором предварительно заданных параметров железнодорожного транспортного средства и с возможностью обеспечивать в режиме реального времени информацию о железнодорожном транспортном средстве для устройства дистанционного управления.
2. Система по п. 1, в которой устройство дистанционного управления дополнительно снабжено видеодисплеем для отображения в режиме реального времени информации о железнодорожном транспортном средстве, при этом тип видеодисплея выбран из следующего перечня: катодно-лучевая трубка, бистабильный дисплей, дисплей типа «электронный документ», электрофоретический дисплей, знаковый индикатор тлеющего разряда, электролюминесцентный дисплей, плазменная дисплейная панель, дисплей на светоизлучающих диодах, дисплей на жидких кристаллах, вакуумный люминесцентный индикатор, высокопроизводительный адресующий дисплей, тонкопленочный транзисторный дисплей, дисплей на органических светоизлучающих диодах, дисплей-эмиттер электронов с поверхностной проводимостью, лазерный телевизионный дисплей.
3. Система по п. 1, в которой гаптическая технология реализована в виде одного из следующих органов: по меньшей мере один программируемый вращаемый орган управления, по меньшей мере один сенсорный экран, по меньшей мере один орган управления типа «джойстик».
4. Система по п. 2, в которой видеодисплей содержит сенсорный экран, выполненный с возможностью обеспечения исполнимых командных функций для железнодорожного транспортного средства.
5. Система по п. 1, в которой в устройстве дистанционного управления дополнительно использована технология биометрической верификации для верификации отпечатка пальца оператора.
6. Система по п. 1, дополнительно содержащая видеокамеру, связанную с устройством дистанционного управления и выполненную с возможностью предварительного выбора оператором места для ее размещения.
7. Система по п. 6, в которой видеокамера выполнена с возможностью обеспечения неподвижных и/или движущихся изображений.
8. Способ управления железнодорожным транспортным средством, снабженным регулятором тяги для обеспечения тяговой мощности железнодорожного транспортного средства с целью приведения его в движение и тормозной системой для обеспечения тормозной мощности для железнодорожного транспортного средства, включающий следующие операции:
обеспечение наличия устройства дистанционного управления, выполненного с использованием гаптической технологии, содержащего по меньшей мере одну ручку, выполненную с использованием тактильно-сенсорной технологии и обеспечивающую блокирование работы устройства дистанционного управления, если указанная по меньшей мере одна ручка не находится в контакте с оператором, и разрешающую работу устройства дистанционного управления при наличии соответствующего контакта с оператором,
обеспечение наличия первого контроллерного модуля, соединенного с железнодорожным транспортным средством и находящегося в связи с устройством дистанционного управления,
передача командного сигнала от устройства дистанционного управления на первый контроллерный модуль,
прием командного сигнала от устройства дистанционного управления для управления набором предварительно заданных параметров железнодорожного транспортного средства,
текущий контроль упомянутого набора предварительно заданных параметров железнодорожного транспортного средства через посредство упомянутого первого контроллерного модуля,
предоставление устройству дистанционного управления в режиме реального времени информации о железнодорожном транспортном средстве от первого контроллерного модуля и
отображение упомянутой информации в режиме реального времени на устройстве дистанционного управления.
9. Способ по п. 8, при котором устройство дистанционного управления дополнительно снабжают видеодисплеем, предназначенным для отображения в режиме реального времени информации о железнодорожном транспортном средстве, при этом тип видеодисплея выбирают из следующего перечня: катодно-лучевая трубка, бистабильный дисплей, дисплей типа «электронный документ», электрофоретический дисплей, знаковый индикатор тлеющего разряда, электролюминесцентный дисплей, плазменная дисплейная панель, дисплей на светоизлучающих диодах, дисплей на жидких кристаллах, вакуумный люминесцентный индикатор, высокопроизводительный адресующий дисплей, тонкопленочный транзисторный дисплей, дисплей на органических светоизлучающих диодах, дисплей-эмиттер электронов с поверхностной проводимостью, лазерный телевизионный дисплей.
10. Способ по п. 8, в котором гаптическую технологию выбирают из группы, содержащей по меньшей мере один программируемый вращающийся орган управления, по меньшей мере один сенсорный экран, по меньшей мере один орган управления типа «джойстик».
11. Способ по п. 9, в котором видеодисплей снабжен сенсорным экраном, выполненным с возможностью обеспечения исполнимых командных функций для железнодорожного транспортного средства.
12. Способ по п. 8, в котором устройство дистанционного управления дополнительно содержит технологию биометрической верификации для верификации отпечатков пальца оператора.
13. Способ по п. 8, в котором дополнительно используют видеокамеру, находящуюся в связи с устройством дистанционного управления, при этом упомянутую видеокамеру устанавливают в предварительно выбранном оператором месте ее размещения.
14. Способ по п. 13, в котором видеокамера выполнена с возможностью обеспечения неподвижных и/или движущихся изображений.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| КОНТРОЛЬНОЕ УСТРОЙСТВО И СПОСОБ НАБЛЮДЕНИЯ ЗА РАБОЧИМ ПОЕЗДОМ | 2004 |
|
RU2318684C2 |

