Изобретение предназначено для применения в области авиационного приборостроения, в частности, в пилотажно-навигационном оборудовании летательных аппаратов (ЛА).
Этап посадки является наиболее ответственным и напряженным участком полета ЛА. Близость земли и контакт с поверхностью взлетно-посадочной полосы (ВПП) требует высокой точности управления угловыми, скоростными и траекторными параметрами полета.
Теоретические и практические аспекты функционирования бортового и наземного оборудования, обеспечивающего выполнение посадки ЛА, приведены в следующих работах:
1. Авиационная радионавигация. Справочник. Под редакцией Сосновского А.А., М.: Транспорт, 1990. 264.
2. Белогородский С.Л. Автоматизация управления посадкой самолета, М.: Транспорт, 1972. 352.
3. Воробьев Л.М. Воздушная навигация, М.: Машиностроение, 1984, 256 с.
4. Гуськов Ю.П. Дискретно-непрерывное управление программным выведением самолетов, М.: Машиностроение, 1987, 128.
5. И.И. Помыкаев, В.П. Селезнев, Л.А. Дмитроченко “Навигационные приборы и системы”, М.: Машиностроение, 1983.
6. O.A. Бабич "Обработка информации в навигационных комплексах", М.: Машиностроение, 1991.
7. Рогожин В.О., Синеглазов В.М., Филяшкин М.К. Пилотажно-навигационные комплексы воздушных суден, К.: Книжное издательство НАУ, 2005 (на украинском языке).
8. С.С. Ривкин, Р.И. Ивановский, А.В. Костров “Статистическая оптимизация навигационных систем”, Л.: Судостроение, 1976.
9. Справочник пилота и штурмана гражданской навигации. Под редакцией Васина И.Ф., М.: Транспорт, 1988.
10. Ф.В. Репников, Г.П. Сачков, А.И. Черноморский “Гироскопические системы”, М.: Машиностроение, 1983.
11. Алексеев А.Н., Беляев М.А., Никулин А.С. и др. “Инерциально-спутниковый режим посадки”. Тезисы докладов Всероссийской научно-технической конференции “Навигация, наведение и управление летательными аппаратами”. М., Научтехлитиздат, 2012, стр.226-228.
На большинстве современных аэродромов траектория захода на посадку формируется равносигнальными зонами электромагнитных излучений наземных курсового (КРМ) и глиссадного (ГРМ) радиомаяков, пересечение которых представляет заданную траекторию захода на посадку. Подробное описание процессов и процедур формирования заданной траектории захода на посадку с помощью КРМ и ГРМ приведено в книгах [1, 2, 4, 7, 9].
Для автоматического и ручного управления ЛА на этапе посадки необходима разнообразная информация о параметрах его движения: курсе, крене, тангаже, скорости, координатах, высоте, угловых скоростях, ускорениях. Для измерения этих параметров на борту современных ЛА наибольшее применение нашли инерциальные навигационные системы (ИНС), системы воздушных сигналов (СВС) и спутниковые навигационные системы (СНС). Теоретические и практические аспекты функционирования ИНС, СВС и СНС отражены в книгах [3, 5, 7].
Для повышения точности и надежности определения навигационных данных, в том числе на этапе посадки, в настоящее время широко используются методы комплексной обработки данных от различных по физическому принципу действия систем, в частности: от ИНС, СВС и СНС. Различные аспекты применения некоторых методов комплексной обработки навигационных данных отражены в книгах [5, 6, 7, 8].
Известны способы управления, реализующие полет ЛА по заданной траектории посадки. Эти способы обеспечивают выработку управляющих сигналов, подаваемых на органы управления угловым положением ЛА с целью вывода ЛА в заданную область воздушного пространства с заданными параметрами пространственного положения ЛА, где экипажем принимается решение о приземлении или о совершении повторного захода на посадку.
Из описанных в литературе аналогов близким по технической сущности является способ, описанный в книге [7] “Пилотажно-навигационные комплексы воздушных судов” в параграфах 2.7 и 8.2.
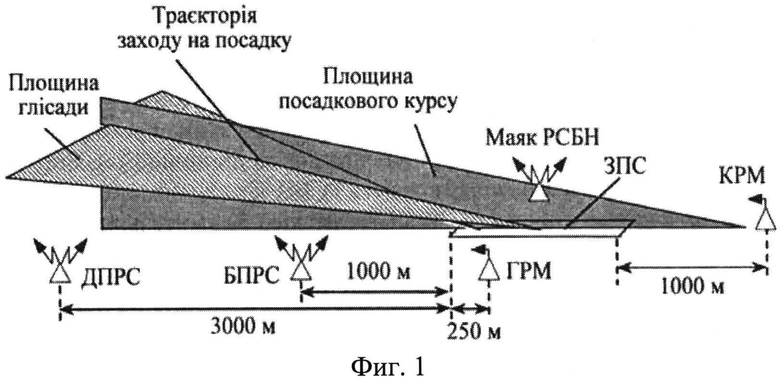
В данном способе для захода на посадку используется траектория, формируемая равносигнальными зонами наземных КРМ и ГРМ, пересечение которых представляет заданную траекторию посадки. Чертеж, иллюстрирующий процесс формирования заданной траектории посадки излучением КРМ и ГРМ, изображен на стр.52 книги [7] (рис.2.6), копия которого представлена на фиг.1.
Особенностью способа является использование для управления не линейных, а угловых отклонений от траектории: εг - угловое отклонение ЛА от плоскости глиссады, εк - угловое отклонение ЛА от плоскости посадочного курса.
Наземное радиомаячное оборудование для формирования посадочной траектории достаточно дорого стоит. Для его поддержания в работоспособном состоянии требуется регулярно проводить дорогостоящие работы по проверке, калибровке и регулировке. Поэтому, как показывает практика, далеко не все аэродромы оснащаются наземным радиотехническим посадочным оборудованием, а уже установленное оборудование временно может быть в неработоспособном или неисправном состоянии.
Сигналы, излучаемые КРМ и ГРМ, в силу своей радиотехнической природы подвержены искажениям и помехам, связанным с характером подстилающей поверхности, состоянием атмосферы, работой внешних электрических и радиотехнических устройств и т.п. Для парирования влияния таких помех на процесс захода на посадку в системах управления ЛА применяют соответствующие меры, как правило, осуществляют их фильтрацию. Однако наличие, в конкретный момент времени, значительных, нерасчетных помех в сигналах КРМ и ГРМ может привести к ухудшению характеристик всего контура управления ЛА.
Известным недостатком этого способа (стр.254 [7]) также является нестационарность динамических характеристик режима посадки при использовании угловых параметров отклонения центра масс ЛА от заданной траектории (εг, εк). На разных расстояниях до радиомаяка, при одинаковых линейных отклонениях от заданной траектории посадки, угловые отклонения имеют разные значения и соответственно, при стационарных коэффициентах усиления, вносят различный вклад в результирующий управляющий сигнал. Это может привести к ухудшению характеристик всего контура управления, в контуре могут появиться колебания, которые будут увеличиваться по мере приближения к радиомаяку. Особенно это актуально для контура управления по глиссаде, т.к. ГРМ размещается у ближнего к ЛА торца ВПП (см. фиг.1).
Указанные недостатки в значительной степени устранены в способе, представленном в работе “Инерциально-спутниковый режим посадки” [11].
Поэтому, с учетом цели предлагаемого изобретения, полагают, что способ-прототип описан одновременно в книге [7] и работе [11].
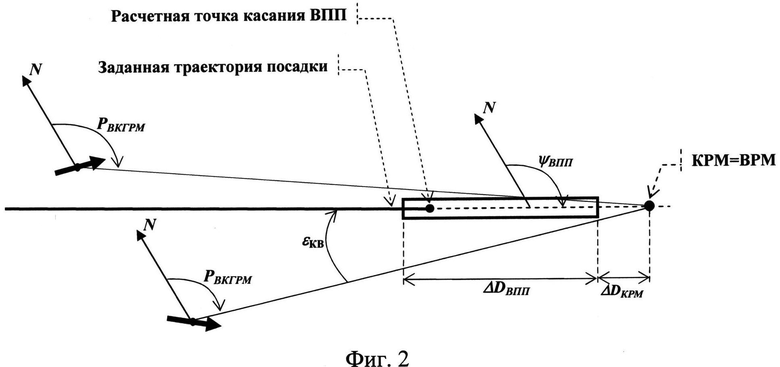
С учетом только существенных для предлагаемого изобретения признаков, способ-прототип включает измерение параметров движения ЛА с помощью автономных навигационно-пилотажных датчиков, например ИНС и СВС, коррекцию измеренных параметров движения ЛА по данным от СНС, формирование заданной траектории посадки, с заданным углом наклона и совпадающей по направлению с ВПП, относительно виртуального курсо-глиссадного радиомаяка (ВРМ), размещенного под точкой стандартного положения КРМ, определение пеленга и угла места ВРМ, определение углов отклонения по курсу и глиссаде от заданной траектории посадки, формирование сигналов управления угловым положением ЛА по крену и тангажу с учетом углов отклонения соответственно по курсу и глиссаде и изменение углового положения ЛА в соответствии со сформированными сигналами управления.
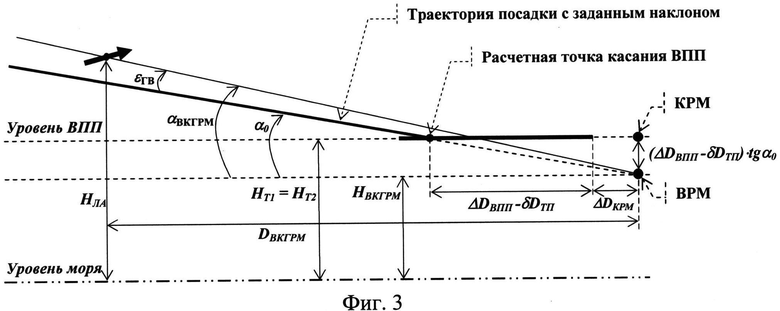
Чертежи, иллюстрирующие процесс формирования заданной траектории посадки в горизонтальной и вертикальной плоскостях, в соответствии со способом-прототипом представлены соответственно на фиг.2 и фиг.3.
С помощью ИНС и СВС можно измерить курс, крен, тангаж, скорость относительно поверхности земли, координаты местоположения, высоту относительно уровня моря и высоту относительно уровня аэродрома.
ИНС и СВС являются автономными системами и обеспечивают непрерывное измерение указанных параметров. Однако в их сигналах могут присутствовать достаточно существенные погрешности. Для повышения точности, данные от ИНС и СВС корректируют по данным от СНС.
СНС являются неавтономными радиотехническими системами. С их помощью можно измерить скорость относительно поверхности земли и координаты местоположения ЛА с высокой точностью. Однако СНС не могут обеспечить непрерывность указанных измерений и их сигналы подвержены помехам естественного и искусственного характера.
Поэтому, как правило, на борту современных ЛА сигналы ИНС и СВС, в целях решения задач навигации, корректируют по данным от СНС с использованием одного из методов комплексной обработки информации, например метода оптимальной фильтрации случайных сигналов Калмана (ОФК). Данный метод позволяет при наличии достоверных сигналов от СНС осуществлять оценивание и прогноз изменения погрешностей корректируемых систем. Метод ОФК подробно описан в книгах [6, 7, 8].
В процессе реализации автоматического режима захода на посадку используют известные законы управления движением центра масс через контуры управления креном и тангажем ЛА. В книге [7] на стр.255-256 приведены примеры законов автоматического управления ЛА по крену и тангажу, в которых, наряду с другими сигналами, используются сигналы отклонения ЛА от заданной траектории по курсу εк и глиссаде εг.
Для реализации ручного режима захода на посадку на соответствующих индикационных приборах одновременно индицируют в виде вертикально и горизонтально ориентированных планок сигналы отклонения от заданной траектории по курсу εк и глиссаде εг.
Схема размещения ВРМ относительно ВПП в горизонтальной плоскости полностью соответствует стандартной схеме размещения КРМ на аэродроме, а в вертикальной плоскости ВРМ размещается под КРМ на продолжении траектории посадки.
В соответствии со стандартной схемой размещения радиотехнического оборудования, КРМ размещается на продолжении оси ВПП на некотором удалении от дальнего торца ВПП. Для разных аэродромов величина удаления ΔDKPM варьируется, но как правило она равна 1000 м (см. фиг.1).
В способе-прототипе процедура управления ЛА при заходе на посадку не зависит от наличия/исправности на конкретном аэродроме КРМ и ГРМ, наличия в сигналах КРМ и ГРМ случайных помех и обеспечена устойчивость процесса управления ЛА в вертикальной плоскости на малых расстояниях до точки посадки.
Способ-прототип обеспечивает формирование заданной траектории посадки при наличии на борту ЛА соответствующей информации об аэродроме посадки, а именно о курсе ВПП, координатах дальнего и ближнего торцов ВПП и их высоте относительно уровня моря. Как правило, эта информация вводится в бортовое оборудование современных ЛА в процессе его предполетной подготовки и хранится в бортовой электронной базе данных.
В современных бортовых системах может храниться очень много информации о множестве навигационных точках, в том числе и о большом количестве аэродромов. Вся совокупность информации о навигационных точках составляет так называемую “программу полета”, и аэродром, информация о котором хранится на борту ЛА, называется запрограммированным аэродромом.
Однако, как показывает летная практика, вероятность возникновения ситуаций, требующих совершения экстренной посадки на аэродром, информация о котором отсутствует на борту ЛА, т.е. на незапрограммированный аэродром, весьма высока. В таких ситуациях необходимо осуществить экстренный ввод в бортовое оборудование ЛА данных о координатах, высоте и курсе ВПП этого незапрограммированного аэродрома.
Возможно, но не гарантировано, получение такой информации по радиосвязи или из штурманских справочников. Затраты времени на ручной ввод всех этих параметров в бортовое оборудование весьма высоки, особенно для координат, которые необходимо вводить с точностью до десятых долей угловых секунд. Поэтому, вероятнее всего, даже при доступности этой информации, в ситуации, требующей экстренной посадки на такой незапрограммированный аэродром, загруженность экипажа будет столь велика, что не позволит ему отвлекаться от пилотирования ЛА на операции ручного ввода в бортовое оборудование всех необходимых данных об аэродроме. Особенно это актуально для ЛА с одним членом экипажа.
При этом, для построения траектории посадки в соответствии со способом-прототипом, в минимально необходимый набор информации об аэродроме входят координаты ближнего торца ВПП относительно ЛА и курс ВПП. Наличие таких параметров, с учетом известных параметров “стандартной” ВПП позволяет сформировать на борту ЛА траекторию посадки в соответствии со способом-прототипом.
Целью предлагаемого изобретения является повышение безопасности полета ЛА и расширение функциональных возможностей по автоматическому формированию траектории при посадке ЛА на незапрограммированные при его подготовке аэродромы.
Данная цель достигается тем, что, относительно способа-прототипа, в предлагаемом способе предварительно, до начала движения ЛА по траектории посадки, используя любую из бортовых систем визуальной ориентации, измеряют относительные координаты ближнего торца ВПП незапрограммированного аэродрома, а курс ВПП формируют одним из двух альтернативных методов:
1) задают на любом из установленных на борту ЛА задатчиков угловых параметров;
2) по уже измеренным координатам ближнего торца ВПП и координатам дальнего торца ВПП, которые дополнительно измеряют, используя любую из бортовых систем визуальной ориентации.
Таким образом, с учетом только существенных для предлагаемого изобретения признаков, в способе управления траекторией ЛА при посадке на незапрограммированный аэродром, включающем измерение с помощью инерциальных, аэрометрических и спутниковых навигационных систем курса, крена, тангажа, угловой скорости, составляющих вектора путевой скорости, координат и высоты ЛА, комплексную обработку измеренных параметров, формирование на борту ЛА траектории посадки относительно ВРМ, который размещают с противоположной стороны ВПП на продолжении траектории посадки, формирование отклонений ЛА от траектории посадки, формирование сигналов управления угловым положением ЛА по крену и тангажу и изменение углового положения ЛА в соответствии со сформированными сигналами управления, предварительно, до начала движения ЛА по траектории посадки, визуально идентифицируют ВПП незапрограммированного аэродрома, используя любую из бортовых систем визуальной ориентации, измеряют дальность и углы визирования ближнего торца ВПП, которые, с учетом текущих координат ЛА, используют для определения координат ближнего торца ВПП, которые в свою очередь, с учетом длины стандартной ВПП и заданного, на любом из имеющихся на борту ЛА задатчиков угловых параметров, курса ВПП, используют для определения координат ВРМ.
При втором методе формирования курса ВПП, дополнительно, с помощью любой из бортовых систем визуальной ориентации измеряют дальность и углы визирования дальнего торца ВПП, которые, с учетом текущих координат ЛА, используют для определения координат дальнего торца ВПП, а курс ВПП формируют как направление прямой линии, соединяющей ближний и дальний торцы ВПП.
Чертеж, иллюстрирующий работу способа при определении курса ВПП по координатам двух торцов ВПП, представлен на фиг.4.
С помощью имеющихся на борту ЛА автономных датчиков навигационной информации, например ИНС и СВС, измеряют сигналы ускорения, угловые скорости, курс, крен, тангаж, скорость, координаты, высоту ЛА. В качестве датчиков высокоточной навигационной информации в настоящее время наибольшее применение нашли СНС, которые с высокой точностью измеряют скорость, координаты и высоту ЛА.
Оценка погрешностей автономных датчиков навигационной информации по данным от СНС может быть осуществлена с использованием одного из современных методов комплексной обработки информации, например оптимального фильтра Калмана (ОФК). Метод ОФК, при наличии достоверных сигналов от СНС, позволяет производить оценивание погрешностей автономных датчиков, а при пропадании сигналов от СНС осуществлять прогноз изменения их погрешностей.
В настоящее время на современных ЛА в качестве систем визуальной ориентировки широко используются оптические локационные станции, имеющие в своем составе лазерные дальномеры, коллиматорные авиационные индикаторы, нашлемные визиры, тепловизоры и др. С помощью этих устройств можно измерить дальность до любой точки на земной поверхности и углы визирования этой точки относительно строительных осей ЛА.
При возникновении на борту ЛА ситуации, требующей экстренной посадки на аэродром, параметры которого отсутствуют на борту ЛА, экипаж визуально ориентируется относительно ВПП этого аэродрома и с помощью любой из имеющихся на бору ЛА систем визуальной ориентации измеряет дальность до ближнего торца ВПП Dб и углы ориентации линии направления на ближний торец ВПП относительно строительных осей ЛА аyб, аzб. Эти параметры с учетом курса ψ, крена γ, тангажа υ ЛА пересчитываются в относительные координаты ближнего торца ВПП Δφ1, Δλ1, ΔH1, а затем и в полные географические координаты φT1, λT1, HT1:
где R - радиус Земли, который для данной задачи, с достаточным уровнем точности, может быть принят равным 6371 км.
Данные формулы являются иллюстративными и приведены в предположении малой дальности от ЛА до торца ВПП (до 25 км, что соответствует предельной дальности большинства авиационных лазерных дальномеров) и нахождения ЛА в прямолинейном горизонтальном полете (γ=υ=0).
С помощью любого из имеющихся на борту ЛА задатчиков угловой информации, экипаж вручную формирует курс ВПП ψВПП относительно местного меридиана. Эта информация может быть получена по радиосвязи или из штурманского справочника. В качестве длины ВПП в этом случае используется длина ВПП стандартного аэродрома, например DВПП=2500 м, а координаты дальнего торца ВПП определяются в соответствии с формулами:
φТ2=φТ1+DВПП·cosψВПП/R;
λТ2=λТ1+DВПП·cosψВПП/R·cosφЛА;
НТ2=НТ1.
При невозможности получения или ввода информации о курсе ВПП, экипаж с помощью любой из имеющихся на бору ЛА систем визуальной ориентировки дополнительно измеряет дальность до дальнего торца ВПП DДТ и углы ориентации линии направления на дальний торец ВПП относительно строительных осей ЛА φyДТ, φzДТ, которые в соответствии с формулами (1) пересчитываются в относительные координаты дальнего торца ВПП Δφ2, Δλ2, ΔН2, а затем и в его полные географические координаты φТ2, λТ2, НТ2.
Параметры φТ1, λТ1 и φТ2, λТ2 пересчитываются в курс ВПП ψВПП и длину ВПП DВПП:
 ,
,
 ,
,
где ΔφА=(φТ2-φТ1)·R, ΔλА=(λТ2-λT1)·R·cosφТ1.
При переходе в режим посадки, на борту ЛА, с использованием точных значений координат и высоты ЛА φЛА, λЛА, НЛА, курса, длины, координат и высоты ближнего торца ВПП ЛА ψВПП, DВПП, φТ1, λТ1, HT1, угла наклона траектории посадки α0, формируют все параметры, характеризующие текущее положение ВРМ, текущую заданную траекторию посадки и положение ЛА относительно этой траектории.
Горизонтальная дальность до ближнего торца ВПП:
 ,
,
где Δφ1=(φТ1-φЛА)·R, Δλ1=(λТ1-λЛА)·R·cosφТ1.
Пеленг и горизонтальная дальность до ВРМ:
 ,
,
 ,
,
где Δφ2=(φТ2-φЛА)·R+ΔDKPM·cosψВПП, Δλ2=(λТ2-λЛА)·R·cosφТ2+ΔDKPM·cosψВПП.
Угол места ВРМ:
 ,
,
где НВРМ=НТ2-(DВПП-δDТП)·tgα0 - высота ВРМ относительно уровня моря, δDТП - удаление расчетной точки посадки от ближнего торца ВПП, равное, например, 100 м.
Угловые отклонения ЛА аппарата от заданной траектории посадки:
εКВ=РВРМ-ψВПП,
εГВ=αВРМ-α0.
Сигналы отклонений от заданной траектории посадки по курсу εКВ и глиссаде εГВ подаются в систему автоматического управления ЛА для обеспечения посадки в автоматическом режиме и на соответствующие индикационные приборы для обеспечения посадки в ручном режиме.
Таким образом, на примерах реализации показано достижение технических результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2014 |
|
RU2598111C9 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| Способ посадки орбитального самолета без колесного шасси с помощью экраноплана и устройство для его реализации | 2022 |
|
RU2795630C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СПОСОБ ПОДГОТОВКИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ К ПОЛЕТУ | 2013 |
|
RU2529757C1 |
Изобретение относится к способу управления траекторией летательного аппарата (ЛА) при посадке на незапрограммированный аэродром. Техническим результатом является повышение безопасности полета ЛА. В способе управления траекторией летательного аппарата при посадке на незапрограммированный аэродром измеряют и корректируют параметры движения ЛА, формируют параметры положения ЛА относительно взлетно-посадочной полосы (ВПП), формируют заданную траекторию посадки относительно виртуального курсо-глиссадного радиомаяка (ВРМ), который размещают под точкой стандартного положения курсового радиомаяка, управляют угловым положением ЛА по крену и тангажу с учетом рассогласования пеленга ВРМ и курса ВПП и рассогласования угла места ВРМ и угла наклона заданной траектории посадки, измеряют координаты ближнего торца ВПП незапрограммированного перед полетом аэродрома, которые, с учетом стандартной длины ВПП или расчетной длины ВПП и заданного или расчетного курса ВПП, используют для определения координат ВРМ. 1 з.п. ф-лы, 4 ил.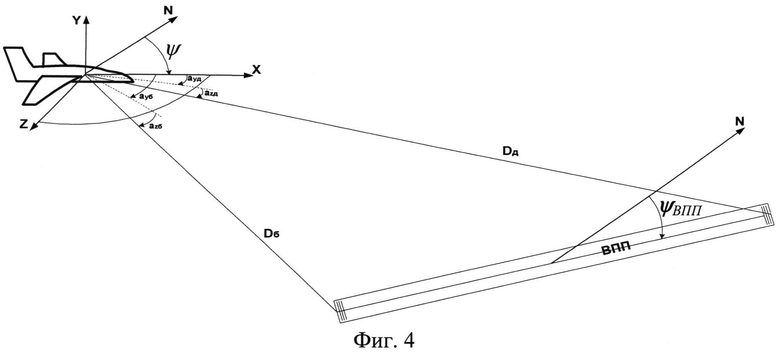
1. Способ управления траекторией летательного аппарата при посадке на незапрограммированный аэродром, включающий измерение с помощью инерциальных, аэрометрических и спутниковых навигационных систем курса, крена, тангажа, угловой скорости, составляющих вектора путевой скорости, координат и высоты летательного аппарата (ЛА), комплексную обработку измеренных параметров, формирование на борту ЛА траектории посадки относительно виртуального курсо-глиссадного радиомаяка (ВРМ), который размещают с противоположной стороны взлетно-посадочной полосы (ВПП) на продолжении траектории посадки, формирование отклонений ЛА от траектории посадки, формирование сигналов управления угловым положением ЛА по крену и тангажу и изменение углового положения ЛА в соответствии со сформированными сигналами управления, отличающийся тем, что предварительно, до начала движения ЛА по траектории посадки, визуально идентифицируют ВПП незапрограммированного аэродрома, используя любую из бортовых систем визуальной ориентации, измеряют дальность и углы визирования ближнего торца ВПП, которые, с учетом текущих координат ЛА, используют для определения координат ближнего торца ВПП, которые в свою очередь, с учетом длины стандартной ВПП и заданного, на любом из имеющихся на борту ЛА задатчиков угловых параметров, курса ВПП, используют для определения координат ВРМ.
2. Способ управления траекторией летательного аппарата при посадке на незапрограммированный аэродром по п.1, отличающийся тем, что дополнительно, с помощью любой из бортовых систем визуальной ориентации измеряют дальность и углы визирования дальнего торца ВПП, которые, с учетом текущих координат ЛА, используют для определения координат дальнего торца ВПП, а курс ВПП формируют как направление прямой линии, соединяющей ближний и дальний торцы ВПП.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

