Изобретение относится к аэрокосмической области и может быть использовано в системах управления летательных аппаратов.
Известен «Способ посадки самолета», (Патент РФ 2 028 252 C1 МПК: B64C 13/00, B64D 33/04, опубл. 09.02.1995) заключающийся в том, что включая одновременное реверсирование двигателей и изменение посадочной конфигурации крыла до взлетной (полетной), при пробеге самолета по поверхности ВПП с момента касания, на высоте выравнивания включают малый реверс тяги при работе двигателей до максимального реверса при достижении скорости пробега, при которой отмечается попадание в двигатели реверсивных газов, снижают режим работы реверсированных двигателей до малого газа, а при достижении самолетом скорости руления реверс тяги выключают.
Недостатком данного способа является то, что он снижает грузоподъемность ОС.
Известен «Способ посадки самолетов» (Патент РФ 2 296 372 C2, МПК: G08G 5/02, опубл. 27.03.2007), заключающийся в том, что излучают радиоимпульсы из двух точек с известными координатами, расположенными в плоскости взлетно-посадочной полосы (ВПП), определяют азимуты самолета на каждую точку излучения, устанавливают на самолете по одной антенне в вершинах равностороннего треугольника, переводят полет самолета в горизонтальную плоскость, принимают радиоимпульсы, измеряют временные задержки прихода радиоимпульса к антеннам, определяют «грубо» азимуты до ближней и дальней точек излучения, определяют точные значения азимутов на точки излучения, определяют малую временную задержку для горизонтальной плоскости, в которой находится самолет, определяют угол места до ближней точки излучения радиоимпульса, определяют с учетом высоты полета горизонтальную дальность до ближайшей точки излучения, контролируют непрерывно при полете самолета по глиссаде значения определенных величин до момента касания колес самолета ВПП и движения по ВПП до полной остановки.
Недостатком данного способа является то, что он снижает грузоподъемность ОС и позволяет осуществлять посадку ОС только на ВПП, вблизи которой находятся излучатели радиоимпульсов.
Наиболее близким по технической сущности предлагаемому способу является «Способ управления летательным аппаратом при заходе на посадку» (Патент РФ 2598111 С9, МПК: G05D 1/0, B64D 45/04, G08G 5/02, G01S 19/15, опубл. 20.10.2016, бюлл. 29), заключающийся в том, что измеряют с помощью инерциальной навигационной системы (ИНС), систем воздушных сигналов (СВС), спутниковой навигационной системы (СНС) курс, крен и тангаж ЛА, угловую, горизонтальную и вертикальную скорости ЛА, координаты и высоту ЛА, формируют курс взлетно-посадочной полосы (ВПП) на основе уточненных координат высоты ЛА и координат высоты ВПП, формируют сигналы управления угловым положением ЛА по крену и тангажу, изменяют в автоматическом или ручном режиме угловое положение ЛА в соответствии со сформированными сигналами управления, формируют траекторию посадки с заданным экипажем углом наклона, совпадающую по направлению с курсом ВПП, с помощью курсового, глиссадного и дальномерного радиомаяков (КРМ, ГРМ и ДРМ). В случае отсутствия на борту ЛА сигналов «Готовность курса (глиссады или дальности)» сигналы управления формируют с помощью параметров виртуального курсового (глиссадного или дальномерного) маяков (ВКРМ, ВГРМ, ВДРМ), размещенных определенным образом. Определяют координаты и высоту ВГРМ, пеленг ВКРМ и угла места ВГРМ относительно ЛА. Определяют рассогласование пеленга ВКРМ относительно ЛА и курса ВПП, рассогласование угла места ВГРМ относительно ЛА и заданного экипажем угла наклона траектории посадки для корректировки сигналов управления.
Недостатком данного способа является то, что он снижает грузоподъемность ОС и не позволяет осуществлять посадку ОС на водную поверхность.
Задачей изобретения является создание способа и устройства, позволяющих осуществлять посадку ОС без колесного шасси.
Техническим результатом является повышение грузоподъемности ОС и возможность осуществления его посадки на воду.
Технический результат достигается тем, что измеряют с помощью инерциальной навигационной системы (ИНС), системы воздушных сигналов (СВС) и спутниковой навигационной системы (СНС) путевой угол, крен и тангаж ОС, угловую, горизонтальную и вертикальную скорости ОС, трехмерные координаты ОС, формируют сигналы управления угловым положением ОС по крену и тангажу, изменяют в автоматическом или ручном режиме угловое положение ОС в соответствии со сформированными сигналами управления, причем перед формированием путевого угла на экраноплане, задают путевую скорость, путевой угол экраноплана и скорость сближения ОС и экраноплана, при которых проводится стыковка ОС с экранопланом, задают координаты точки положения конца носа ОС, относительно центра масс экраноплана, при попадании конца носа ОС в которую начинается процесс стыковки ОС с экранопланом, включают режим посадки, передают сигнал о готовности к посадке, при этом выдерживают нулевой крен экраноплана, после измерения путевого угла, крена и тангажа ОС, принимают информацию о путевом угле, путевой скорости и трехмерных координатах экраноплана, вычисляют траекторию движения ОС относительно экраноплана, совпадающую по направлению с путевым углом экраноплана, проводят охлаждение стыковочных элементов, после достаточного для стыковки ОС с экранопланом, наводят ОС на экраноплан, контролируя крен, тангаж и путевой угол ОС и осуществляют соединение стыковочных элементов ОС и экраноплана, генерируют сигнал завершения соединения стыковочных элементов ОС и экраноплана, снижают скорость экраноплана до заданной скорости посадки, осуществляют посадку экраноплана, несущего ОС с прибытием в заданную точку, проводят разъединение стыковочных элементов ОС и экраноплана.
Технический результат достигается за счет введения новых существенных отличий (в способе), заключающихся в том, что перед формированием путевого угла на экраноплане, задают путевую скорость, путевой угол экраноплана и скорость сближения ОС и экраноплана, при которых проводится стыковка ОС с экранопланом, задают координаты точки положения конца носа ОС, относительно центра масс экраноплана, при попадании конца носа ОС в которую начинается процесс стыковки ОС с экранопланом, включают режим посадки, передают сигнал о готовности к посадке, при этом выдерживают нулевой крен экраноплана, после измерения путевого угла, крена и тангажа ОС, принимают информацию о путевом угле, путевой скорости и трехмерных координатах экраноплана, вычисляют траекторию движения ОС относительно экраноплана, совпадающую по направлению с путевым углом экраноплана, проводят охлаждение стыковочных элементов, после достаточного для стыковки ОС с экранопланом, наводят ОС на экраноплан, контролируя крен, тангаж и путевой угол ОС и осуществляют соединение стыковочных элементов ОС и экраноплана, генерируют сигнал завершения соединения стыковочных элементов ОС и экраноплана, снижают скорость экраноплана до заданной скорости посадки, осуществляют посадку экраноплана, несущего ОС с прибытием в заданную точку, проводят разъединение стыковочных элементов ОС и экраноплана, что обеспечивает повышение грузоподъемности ОС за счет отсутствия колесного шасси и возможность осуществления посадки ОС на воду с помощью экраноплана.
Предлагаемый способ осуществляется следующим образом:
1. задают путевую скорость, путевой угол экраноплана и скорость сближения ОС и экраноплана, при которых должна проводится стыковка ОС с экранопланом, путевая скорость может равняться, например, 90-110 м/с, а скорость сближения ОС и экраноплана, например, 1-2 м/с;
2. задают координаты точки положения конца носа ОС, относительно центра масс экраноплана, при прибытии ОС в которую начинается процесс стыковки ОС с экранопланом, например, таким образом, чтобы она находилась на расстоянии r 10-15 метров в горизонтальной плоскости и высоте 3-5 метров от хвостового оперения экраноплана (фиг. 1). Вместо координат конца носа ОС могут использоваться координаты других элементов, например, центра ОС;
3. включают режим посадки, например, используя пульт управления на ОС;
4. передают сигнал о готовности к посадке, например, путем передачи кода готовности к посадке через радиопередающее устройство;
5. стремятся выдерживать нулевой крен экраноплана, например, используя систему автоматического управления движением экраноплана;
6. измеряют с помощью инерциальной навигационной системы (ИНС), систем воздушных сигналов (СВС), спутниковой навигационной системы (СНС) путевой угол, крен и тангаж ОС, угловую, горизонтальную и вертикальную скорости ОС, трехмерные координаты ОС, например, используя геодезическую систему координат;
7. принимают информацию о путевом угле, путевой скорости и трехмерных координатах экраноплана, например, в геодезической системе координат. Параметры движения экраноплана могут измеряться методами, описанными в [1,2];
8. вычисляют траекторию движения ОС относительно экраноплана, совпадающую по направлению с путевым углом экраноплана, например, таким образом, чтобы угловая скорость и величины перегрузок на ОС, не превышали установленных пороговых значений;
9. формируют сигналы управления угловым положением ОС по крену и тангажу, например, учитывая вычисленную траекторию движения ОС;
10. изменяют в автоматическом или ручном режиме угловое положение ОС в соответствии со сформированными сигналами управления, например, используя систему автоматического управления движением ОС и сигналы с пульта управления пилота;
11. проводят охлаждение стыковочных элементов, используя систему охлаждения стыковочных элементов;
12. после достаточного сближения ОС с экранопланом, на заданное расстояние r, наводят ОС на экраноплан, контролируя крен, тангаж и путевой угол ОС и экраноплана, например, таким образом, крен ОС имел нулевое значение, тангаж ОС 1-6 град, в зависимости от тангажа краноплана, а путевой угол ОС совпадал с путевым углом экраноплана, и осуществляют соединение стыковочных элементов ОС и экраноплана, например, путем их взаимного захвата, корректировки местоположения ОС относительно экраноплана и фиксации местоположения ОС на экраноплане;
13. генерируют сигнал завершения соединения стыковочных элементов ОС и экраноплана, например, передавая заданный код по линии передачи данных в систему автоматического управления движением экраноплана;
14. снижают скорость экраноплана до заданной скорости посадки, например, равной половине крейсерской скорости (например, 60-80 м/с);
15. осуществляют посадку экраноплана, несущего ОС, с прибытием в заданную точку, например, в точку где будет проводится отсоединение и дальнейшая транспортировка ОС, заданную в геодезической системе координат;
16. проводят разъединение стыковочных элементов ОС и экраноплана, например, используя пульт управления в кабине пилота.
Известно «Устройство для стыковки фюзеляжа с крылом тяжелого самолета» (Патент 272067, МПК: B64F 5/00 опубл. 26.05.1970)
Устройство содержит стапель, на котором установлено крыло, а также тележку для транспортировки фюзеляжа, отличающееся тем, что, с целью обеспечения внестапельной стыковки фюзеляжа и крыла, собранных в различных стапелях, на тележке симметрично оси фюзеляжа установлены фермы с рельсами, на которых смонтированы каретки поперечных балок, закреплепных через окна в фюзеляже на ложном внутрифюзеляжном каркасе, а над крылом симметрично оси самолета также установлена оборудованная лебедками и опертая на домкраты ферма с продольными рельсами.
Недостатком данного устройства является то, что для стыковки ОС с экранопланом необходимо наличие дополнительного тяжелого оборудования, установленного на ОС из-за которого снижается его полезная нагрузка.
Известно устройство «Орбитальный самолет» (Патент РФ 2193510, МПК B64G 1/14, опубл. 27.11. 2002).
Известное устройство содержит кислородный и водородный топливные баки, двигательную установку, крылья, хвостовое оперение, а также отсек для полезного груза, шасси и средства управления самолетом, причем водородный бак и двигательная установка смонтированы на торцах кислородного бака, а отсек для полезного груза, крылья и хвостовое оперение - на боковой поверхности кислородного бака. Водородный бак имеет обтекаемую форму, а его диаметр больше диаметра кислородного бака в 1,2-1,5 раза. Оси указанных топливных баков смещены друг относительно друга таким образом, что образующие их боковых поверхностей снизу составляют одну линию.
Недостатком известного устройства является отсутствие возможности его посадки на воду.
Наиболее близким из числа технических решений является «Устройство для стыковки самолетов в воздухе» (Патент РФ 2312043, МПК B64D 5/00, B64D 25/00, опубл. 10.12.2007, бюл. 34), состоящее из приспособления для крепления аварийного самолета на большегрузном самолете-спасателе и платформу, установленых на платформе захватов, обеспечивающих фиксацию аварийного самолета относительно устройства, датчиков положения для регулирования скорости и положения большегрузного самолета-спасателя относительно аварийного самолета и демпферов.
Недостатком известного устройства является то, что оно снижает грузоподъемность ОС и не позволяет осуществлять стыковку при нагретых стыковочных элементах, что затрудняет стыковку и посадку ОС с экранопланом.
Технический результат достигается тем, что в устройство для реализации способа посадки орбитального самолета без колесного шасси с помощью экраноплана, содержащее приспособление для крепления ОС на экраноплане, платформу, установленные на ней стыковочные элементы, демпферы, датчики положения ОС, дополнительно на экраноплане вводят систему управления стыковкой, через которую автоматически или через оператора осуществляется соединение и разъединение стыковочных элементов, включающую пульт управления, систему охлаждения стыковочных элементов, систему автоматического управления стыковкой, соединенную с датчиками положения ОС, стыковочными элементами и системой охлаждения стыковочных элементов, а также стыковочные элементы и оптическую систему наведения на экраноплан, установленные на ОС.
Технический результат достигается за счет введения новых существенных отличий (в устройстве), заключающихся в том, что в контур управления вводят на экраноплане систему управления стыковкой, через которую автоматически или через оператора осуществляется соединение и разъединение стыковочных элементов, включающую пульт управления, систему охлаждения стыковочных элементов, систему автоматического управления стыковкой, соединенную с датчиками положения ОС, стыковочными элементами и системой охлаждения стыковочных элементов, а также стыковочные элементы и оптическую систему наведения на экраноплан, установленные на ОС, что повышает грузоподъемность ОС, за счет отсутствия колесного шасси, и позволяет осуществить его посадку на воду с помощью экраноплана.
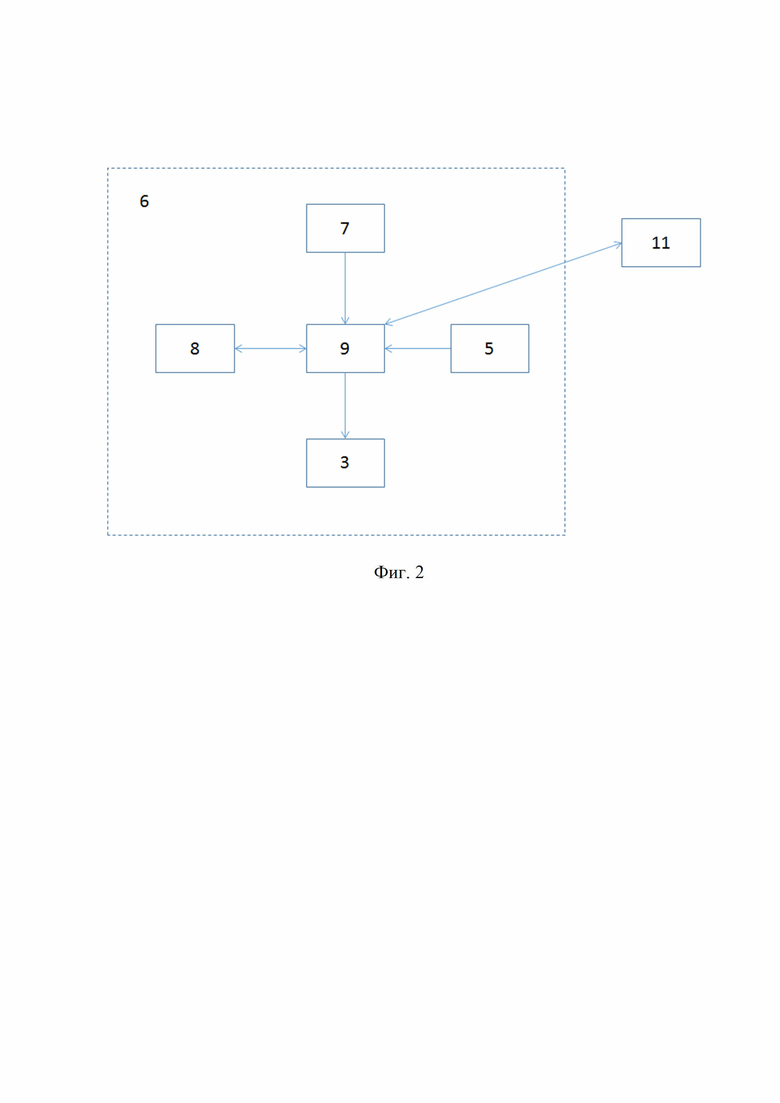
На фиг. 1 и фиг. 2 представлено устройство для реализации способа посадки орбитального самолета без колесного шасси с помощью экраноплана поверхности и введены следующие обозначения:
1 - приспособление для крепления ОС на экраноплане;
2 - платформа;
3 - стыковочные элементы экраноплана;
4 - демпферы;
5 - датчики положения;
6 - система управления;
7 - пульт управления;
8 - система охлаждения стыковочных элементов;
9 - система автоматического управления стыковкой;
10 - стыковочные элементы ОС;
11 - оптическая система наведения на экраноплан.
Устройство содержит приспособление для крепления ОС на экраноплане 1, платформу 2, установленные на ней стыковочные элементы 3, демпферы 4, датчики положения ОС 5, систему управления стыковкой 6, через которую автоматически или через оператора осуществляется соединение и разъединение стыковочных элементов, включающую пульт управления 7, систему охлаждения стыковочных элементов 8, систему автоматического управления стыковкой 9, соединенную с датчиками положения ОС 5, стыковочными элементами 3 и системой охлаждения стыковочных элементов 8, а также стыковочные элементы 10 и оптическую систему наведения на экраноплан 11, установленные на ОС.
В качестве стыковочных элементов на экраноплане и ОС можно использовать, например, высокопрочные термостойкие металлические захваты, производящие автоматический взаимный захват при сближении друг с другом с заданной точностью с определенного направления. Между корпусом аппарата (экраноплана или ОС) и захватом должен быть расположен амортизатор, гасящий удар от стыковки. Фиксация ОС на корпусе экраноплана должна проводиться таким образом, чтобы трение и нагрев между корпусами и стыковочными элементами ОС и экраноплана не разрушали их конструкции. Система автоматического управления стыковкой 9 может представлять собой вычислительное устройство, которое после поступления сигнала запуска стыковки с пульта управления пилота, начинает принимать сигнал с датчиков положения 5, о местоположении ОС и при попадании пространственных и угловых координат ОС относительно экраноплана в установленные диапазоны, автоматически производит захват ОС с использованием стыковочных элементов экраноплана 3, одновременно проводя их охлаждение с использованием система охлаждения стыковочных элементов 8, в случае их перегрева.
Устройство работает следующим образом:
Предварительно проводится настройка системы управления 6. После система автоматического управления стыковкой начинает принимать сигналы с пульта управления 7. Перед началом посадки система автоматического управления стыковкой 9 принимает с пульта управления 7 сигнал о включении режима посадки. После с оптической системы наведения на экраноплан 11 передается сигнал на систему автоматического управления стыковкой 9 и начинается обмен сигналами между ними. После начала стыковки ОС с экранопланом система автоматического управления стыковкой 9 начинает принимать сигналы от датчиков положения 5 и системы охлаждения стыковочных элементов 8 и передавать сигналы на систему охлаждения стыковочных элементов 8 и стыковочные элементы экраноплана 3. После завершения соединения стыковочных элементов ОС и экраноплана система автоматического управления стыковкой 9 переключается на работу в режиме контроля соединения ОС с экранопланом.
Источники информации, принятые во внимание
1. Небылов А.В. Измерение параметров полета вблизи морской поверхности ГААП. СПб., 1994. 307 с. ISBN 5-230-10-349-3.
2. Nebylov A.V., Aerospace Sensors. Encyclopedia. Momentum Press, New Jersey, USA, 2009, 560 p.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ минимизации средней высоты полета летательного аппарата, движущегося вблизи неровной поверхности, и устройство для его осуществления | 2021 |
|
RU2764322C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| Способ и устройство управления полетом группы летательных аппаратов | 2022 |
|
RU2786276C1 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |

Группа изобретений относится к способу и устройству посадки орбитального самолета (ОС) без колесного шасси с помощью экраноплана. Для посадки ОС измеряют параметры движения ОС, формируют сигналы управления угловым положением ОС по крену и тангажу, задают параметры движения экраноплана, включают режим посадки, передают сигнал о готовности к посадке, при этом выдерживают нулевой крен экраноплана, вычисляют траекторию движения ОС относительно экраноплана, совпадающую по направлению с путевым углом экраноплана, проводят охлаждение стыковочных элементов, наводят ОС на экраноплан, контролируя крен, тангаж и путевой угол ОС, и осуществляют соединение стыковочных элементов ОС и экраноплана, генерируют сигнал завершения соединения стыковочных элементов ОС и экраноплана, снижают скорость экраноплана до заданной скорости посадки, осуществляют посадку экраноплана, несущего ОС с прибытием в заданную точку, проводят разъединение стыковочных элементов ОС и экраноплана. Устройство содержит приспособления для крепления ОС на экраноплане, выполненные определенным образом, датчики положения ОС, систему управления стыковкой, содержащую пульт управления, систему охлаждения стыковочных элементов, а также установленные на ОС стыковочные элементы и оптическую систему наведения на экраноплан. Обеспечивается повышение грузоподъемности ОС и возможность его посадки на воду. 2 н.п. ф-лы, 2 ил.
1. Способ посадки орбитального самолета (ОС) без колесного шасси с помощью экраноплана, заключающийся в том, что измеряют с помощью инерциальной навигационной системы (ИНС), системы воздушных сигналов (СВС) и спутниковой навигационной системы (СНС) путевой угол, крен и тангаж ОС, угловую, горизонтальную и вертикальную скорости ОС, трехмерные координаты ОС, формируют сигналы управления угловым положением ОС по крену и тангажу, изменяют в автоматическом или ручном режиме угловое положение ОС в соответствии со сформированными сигналами управления, отличающийся тем, что перед формированием путевого угла на экраноплане задают путевую скорость, путевой угол экраноплана и скорость сближения ОС и экраноплана, при которых проводится стыковка ОС с экранопланом, задают координаты точки положения конца носа ОС относительно центра масс экраноплана, при попадании конца носа ОС в которую начинается процесс стыковки ОС с экранопланом, включают режим посадки, передают сигнал о готовности к посадке, при этом выдерживают нулевой крен экраноплана, после измерения путевого угла, крена и тангажа ОС принимают информацию о путевом угле, путевой скорости и трехмерных координатах экраноплана, вычисляют траекторию движения ОС относительно экраноплана, совпадающую по направлению с путевым углом экраноплана, проводят охлаждение стыковочных элементов, после достаточного для стыковки ОС с экранопланом, наводят ОС на экраноплан, контролируя крен, тангаж и путевой угол ОС, и осуществляют соединение стыковочных элементов ОС и экраноплана, генерируют сигнал завершения соединения стыковочных элементов ОС и экраноплана, снижают скорость экраноплана до заданной скорости посадки, осуществляют посадку экраноплана, несущего ОС с прибытием в заданную точку, проводят разъединение стыковочных элементов ОС и экраноплана.
2. Устройство посадки орбитального самолета (ОС) без колесного шасси с помощью экраноплана по п. 1, содержащее приспособление для крепления ОС на экраноплане, платформу, установленные на ней стыковочные элементы, демпферы, датчики положения ОС, отличающееся тем, что на экраноплане дополнительно установлена система управления стыковкой, через которую автоматически или через оператора осуществляется соединение и разъединение стыковочных элементов, включающая пульт управления, систему охлаждения стыковочных элементов, систему автоматического управления стыковкой, соединенную с датчиками положения ОС, стыковочными элементами и системой охлаждения стыковочных элементов, а также стыковочные элементы и оптическую систему наведения на экраноплан, установленные на ОС.
| Э.А | |||
| АФРАМЕЕВ | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Наземное подвижное средство посадки (НПСП) беспилотного летательного аппарата (БЛА) и способ посадки БЛА на НПСП | 2016 |
|
RU2624522C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ), ВЗЛЕТНО-ПОСАДОЧНОЕ ШАССИ (ВАРИАНТЫ) И СПОСОБ ПОДЪЕМА В ВОЗДУХ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2012 |
|
RU2588198C2 |
| CN 207389580 U, 22.05.2018 | |||
| CN 103984352 B, 19.04.2017 | |||
| CN 106494632 B, 29.11.2019. | |||

