Предлагаемый способ относится к области авиационной техники, к системам управления летательным аппаратом (ЛА) при заходе на посадку и, в частности, может быть реализован в пилотажно-навигационном оборудовании ЛА. Известны способы управления, реализующие полет ЛА по заданной траектории при заходе на посадку. Эти способы обеспечивают формирование сигналов, подаваемых на органы управления угловым положением ЛА с целью вывода ЛА в малую область воздушного пространства с заданными параметрами пространственного положения ЛА, где экипажем принимается решение о приземлении или о совершении повторного захода на посадку.
На большинстве современных аэродромов траектории захода на посадку в горизонтальной и вертикальной плоскостях формируются равносигнальными зонами электромагнитного излучения наземных курсового (КРМ) и глиссадного (ГРМ) радиомаяков, пересечение которых представляет заданные горизонтальную и вертикальную траекторию захода на посадку (фиг. 1, фиг. 2) [1, 2].
Текущую дальность от ЛА до ближайшего торца взлетно-посадочной полосы (ВПП) определяет дальномерный радиомаяк (ДРМ). Подробное описание процессов и процедур формирования заданной траектории захода на посадку с помощью КРМ, ГРМ и ДРМ приведено в главах 7, 8 справочника [1], главе 2 книги [2], разделе 2.7 книги [7], разделе 7.1 справочника [9], стр. 8-19 книги [12]. Описание особенностей функционирования бортового пилотажно-навигационного оборудования при заходе на посадку приведено в главе 3 книги [2], главе 4 книги [4], главах 2 и 8 книги [7], стр. 19-24 книги [12].
Особенностью прототипа является использование для управления не линейных, а угловых отклонений от траекторий: εк - угловое отклонение ЛА от плоскости посадочного курса, εг - угловое отклонение ЛА от плоскости глиссады. На разных расстояниях до радиомаяка, при одинаковых линейных отклонениях от заданной траектории посадки, угловые отклонения имеют разные значения и, соответственно, при стационарных коэффициентах усиления вносят различный вклад в результирующий управляющий сигнал. Это может привести к появлению колебаний, которые будут увеличиваться по мере приближения к радиомаяку. Особенно это актуально для контура управления по глиссаде (фиг. 3) [7]. При наличии дальности до радиомаяка ГРМ проводится коррекция коэффициентов усиления [11]. Поэтому в состав первого прототипа входит ДРМ. Сигналы, излучаемые наземными КРМ, ГРМ, ДРМ, в силу своей радиотехнической природы подвержены искажениям и помехам, связанным с характером подстилающей поверхности, состоянием атмосферы, работой внешних электрических и радиотехнических устройств, в том числе систем сотовой связи стандарта GSM-900 [14].
Для парирования влияния помех на процесс захода на посадку в системах управления ЛА принимают соответствующие меры, как правило, осуществляется их фильтрация [2]. Однако наличие, в конкретный момент времени, значительных нерасчетных помех в сигналах КРМ, ГРМ и ДРМ может привести к ухудшению характеристик всего контура управления ЛА. Недостатком данного способа является невозможность оперативного управления экипажем наклоном траектории посадки, так как ее наклон задается настройками наземных радиомаяков.
У второго прототипа [13] построение траектории посадки осуществляется не с помощью наземных радиотехнических маяков (КРМ, ГРМ, ДРМ), а полностью на борту с использованием задаваемого экипажем угла наклона траектории посадки, точных данных о координатах и высоте ЛА, полученных путем комплексной обработки информации [6, 7, 8] от инерциальной навигационной системы (ИНС), системы воздушных сигналов (СВС) [3, 5, 7, 10] и спутниковой навигационной системы (СНС), а также параметров так называемого «виртуального курсо-глиссадного радиомаяка» (ВКГРМ). Схема размещения ВКГРМ относительно ВПП в горизонтальной плоскости полностью соответствует стандартной схеме размещения реального КРМ на аэродроме, а в вертикальной плоскости ВКГРМ размещается под реальным КРМ на продолжении траектории посадки. В соответствии со стандартной схемой оснащения аэродромов радиотехническим оборудованием, КРМ размещается на продолжении оси ВПП на некотором отдалении от дальнего торца ВПП. С помощью ВКГРМ формируются пеленг и угол места ВКГРМ относительно ЛА [13], причем сигнал управления угловым положением по крену формируется с учетом рассогласования пеленга ВКГРМ и курса ВПП, а сигнал управления угловым положением ЛА по тангажу формируется с учетом рассогласования угла места ВКГРМ и заданного экипажем угла наклона траектории посадки.
Достоинством данного способа является возможность оперативного управления экипажем наклоном траектории посадки. Существенным недостатком данного способа является подверженность СНС, на основе которой реализуется способ, активным и мощным промышленным помехам и недостаточная целостность, а именно продолжительное время, которое необходимо для выявления отказа СНС из-за возможного выхода из строя аппаратуры спутника на орбите, участвующего в данный момент в определении координат ЛА.
Предлагаемый способ отличается тем, что основным режимом работы системы является традиционный - вариант первого прототипа на основе радионавигационной системы посадки (РНСП), включающей КРМ, ГРМ и ДРМ.
При этом наличие в бортовом оборудовании ЛА вычислителя позволяет обеспечить экипажу выбор более крутой траектории наклона глиссады с пересчетом положительных и отрицательных отклонений εг от значений, выдаваемых ГРМ. В случае пропадания сигналов готовностей курса (К), глиссады (Г), дальности (Д) [1] на борту ЛА из-за помех или неисправностей сигналы управления εк, εг формируют с помощью параметров «виртуального курсового радиомаяка» (ВКРМ), «виртуального глиссадного радиомаяка» (ВГРМ), «виртуального дальномерного радиомаяка» (ВДРМ) непосредственно на борту ЛА по аналогии со вторым прототипом [13]. Причем ВКРМ, ВГРМ и ВДРМ размещают в горизонтальной плоскости в соответствии со стандартной схемой размещения КРМ (фиг. 4), а в вертикальной плоскости ВГРМ и ВДРМ размещают под точкой стандартного размещения КРМ на продолжении траектории посадки (фиг. 5), определяют координаты и высоту ВГРМ, формируют пеленг ВКРМ и угол места ВГРМ относительно ЛА, причем сигнал управления угловым положением ЛА по крену формируют с учетом рассогласования пеленга ВКРМ относительно ЛА и курса ВПП (фиг. 4), сигнал управления угловым положением ЛА по тангажу формируют с учетом рассогласования угла места ВГРМ относительно ЛА и заданного экипажем угла наклона траектории посадки (фиг. 5).
Как показывает практика, в бортовых устройствах памяти современных ЛА могут храниться следующие наборы данных, характеризующие конкретную ВПП на конкретном аэродроме:
- координаты центра ВПП φц, λц,
длина ВПП ΔД и курс ВПП ψвпп;
- координаты двух торцов ВПП φТ1, λТ1 и φТ2, λТ2.
С информационной точки зрения, оба набора идентичны и в полной мере характеризуют геометрическую схему конкретной ВПП, например, для первого набора данных координат торцов ВПП являются производными параметрами от φц, λц, ΔД и ψВПП и, наоборот, для второго набора данных координаты центра ВПП длина ВПП и курс ВПП являются производными параметрами от φT1, λT1 и φT2, λТ2.
С учетом этого факта, в предлагаемом способе осуществлена привязка схемы размещения ВКРМ, ВГРМ и ВДРМ к дальнему торцу ВПП. С помощью имеющейся на борту ЛА ИНС измеряют сигналы ускорения, угловые скорости, курс, крен, тангаж, скорость, координаты местоположения. С помощью СВС измеряют высоту ЛА относительно уровня моря, формируют сигнал высоты ЛА относительно аэродрома. С помощью СНС измеряют с высокой точностью сигналы скорости, координаты местоположения, высоты ЛА и используют их для оценки погрешности ИНС и СВС [6, 7, 8]. При переходе в режим посадки на борту ЛА, с использованием точных значений координат и высоты ЛА φЛА λЛA, НЛА, полученных комплексированием данных ИНС, СВС и СНС, хранящихся в бортовых устройствах памяти, координат и высот торцов ВПП ФТ1, λТ1, НT1, φТ2, λT2, НТ2, параметров схемы размещения ВКРМ, ВГРМ, ВДРМ (фиг. 4, фиг. 5), удаления КРМ от торца ВПП ΔДКРМ, равного 1000 м, и заданного экипажем угла наклона траектории посадки α0.
Положение ЛА относительно траекторий посадки определяют сформированные сигналы:
курс и длина ВПП:

где ΔφА=(φТ2-φТ1)R, ΔλA=(λT2-λТ1)R cosφT1,
R - радиус Земли, который для данной задачи, с достаточным уровнем точности, может быть принят равным 6371 км.
Горизонтальная дальность до ближнего торца ВПП:

где Δφ1=(φ1-φЛА)R, Δλ1=(λ1-λЛА) R cos φT1.
Пеленг и горизонтальная дальность до ВКРМ

где Δφ2=(φТ2-φЛА)R+ΔДКРМ ψВПП,
Угол места ВГРМ
где НВГРМ=НТ2-(ΔДВПП-δ ДТП)tg α0,
где НВГРМ - высота ВГРМ относительно уровня моря,
δ ДТП - удаление расчетной точки посадки от ближнего торца ВПП, равное, например, 100 м.
Угловое отклонение ЛА от заданной траектории посадки
εкВ=РВКРМ-ψВПП,
εгВ=αВГРМ-α0.
Ввод в процедуру формирования заданной траектории посадки и текущей дальности до переднего торца ВПП ВКРМ, ВГРМ и ВДРМ объясняется, прежде всего, необходимостью повышения надежности системы посадки. При этом конкретный состав функционирующих в данный момент каналов определяется одним из восьми возможных режимов в соответствии с таблицей 1.
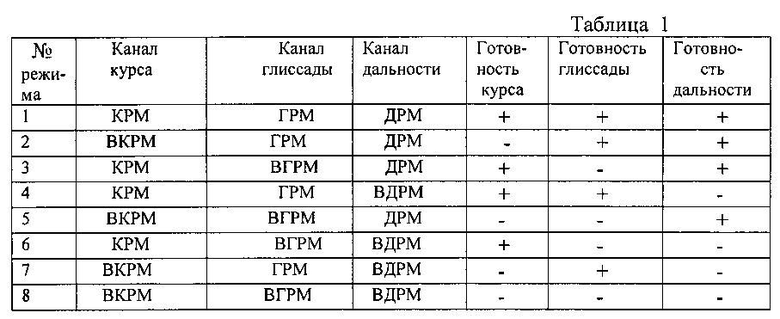
Так, например, при наличии готовности курса, глиссады и дальности функционируют каналы КРМ, ГРМ и ДРМ, режим 1. При другой комбинации, например при отсутствии готовности курса, глиссады и дальности, функционируют каналы ВКРМ, ВГРМ и ВДРМ, режим 8.
При предлагаемом способе работа происходит следующим образом. При отсутствии помех и неисправностей РНСП работает на основе КРМ, ГРМ и ДРМ. При наличии готовностей курса, глиссады и дальности функционируют каналы КРМ, ГРМ и ДРМ, режим 1 (табл. 1). При другой комбинации, например при отсутствии готовности курса, глиссады и дальности, функционируют каналы ВКРМ, ВГРМ и ВДРМ, режим 8 (табл. 1). Таким образом, при различных сочетаниях готовностей РНСП функционирует в соответствующем одном из восьми возможных режимов (табл. 1).
Сигналы отклонений от заданной траектории посадки по курсу и глиссаде подаются на соответствующие приборы для обеспечения посадки в ручном режиме и в систему автоматического управления ЛА для посадки в автоматическом режиме. Для обеспечения идентичности интерфейса для систем автоматического управления и систем индикации на уже работающих и эксплуатируемых ЛА сигналы угловых отклонений от заданной траектории посадки по курсу εкв (от ВКРМ), глиссаде εгв (от ВГРМ), при необходимости, преобразуют к формату сигналов εк и εг, поступающих от бортовой аппаратуры ЛА, взаимодействующей с реальными КРМ и ГРМ.
Таким образом, на примерах реализации показано достижение технических результатов.
Источники информации
1. Авиационная радионавигация. Справочник. Под редакцией Сосновского А.А., М.: Транспорт, 1990, 264.
2. Белгородский С.А. Автоматизация управления посадкой самолета, М.: Транспорт, 1972, 352.
3. Воробьев Л.М. Воздушная навигация, М.: Машиностроение, 1984, 256.
4. Гуськов Ю.П. Дискретно-непрерывное управление программным выведением самолетов, М.: Машиностроение, 1987, 128.
5. И.И. Помыкаев, В.П. Селезнев, А.А. Дмитроченко. «Навигационные приборы и системы», М.: Машиностроение, 1983.
6. О.А. Бабич. «Обработка информации в навигационных комплексах», М.: Машиностроение, 1991.
7. Рогожин В.О., Синеглазов В.М., Фiнешкiн М.К., Пiлотажно-навiгацiтни комплекси повiтряних суден, К.: Книжкове видавництво НАУ, 2005, 316 (на украинском языке).
8. С.С. Ривкин, Р.И. Ивановский, А.В. Костров. «Статистическая оптимизация навигационных систем», Л.: Судостроение, 1976.
9. Справочник пилота и штурмана гражданской авиации. Под редакцией Васина И.О., М.: Транспорт, 1988, 320.
10. Ф.В. Ренников, Г.П. Сачков, А.И. Черноморский. «Гироскопические системы», М.: Машиностроение, 1983.
11. Михайлов И.А., Окаемов Б.Н., Чикулаев М.С. «Системы автоматической посадки», М.: Машиностроение, 1976, 216.
12. Микоян С.А., Корбут А.Г. «Заход на посадку по приборам», М.: Воениздат, 1979, 71.
13. Патент RU 2496131 С1, заявл. 10.07.2012 г. «Способ управления летательным аппаратом при заходе на посадку».
14. Занозин А.Б., Миханов Н.П., Сай П.А. Повышение защищенности бортового приемника радиотехнической системы ближней навигации и посадки от помех подвижной радиосвязи стандарта GSM-900 // Радиотехника. - 2009 г. - №1. - С. 113-116.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2013 |
|
RU2549506C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| Способ посадки орбитального самолета без колесного шасси с помощью экраноплана и устройство для его реализации | 2022 |
|
RU2795630C1 |
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |





Изобретение относится к способу управления летательным аппаратом (ЛА) при заходе на посадку. Для управления ЛА при заходе на посадку измеряют с помощью инерциальной навигационной системы (ИНС), систем воздушных сигналов (СВС), спутниковой навигационной системы (СНС) курс, крен и тангаж ЛА, угловую, горизонтальную и вертикальную скорости ЛА, координаты и высоту ЛА, формируют курс взлетно-посадочной полосы (ВПП) на основе уточненных координат высоты ЛА и координат высоты ВПП, формируют сигналы управления угловым положением ЛА по крену и тангажу, изменяют в автоматическом или ручном режиме угловое положение ЛА в соответствии со сформированными сигналами управления, формируют траекторию посадки с заданным экипажем углом наклона, совпадающую по направлению с курсом ВПП, с помощью курсового, глиссадного и дальномерного радиомаяков (КРМ, ГРМ и ДРМ). В случае отсутствия на борту ЛА сигналов «Готовность курса (глиссады или дальности)» сигналы управления формируют с помощью параметров виртуального курсового (глиссадного или дальномерного) маяков (ВКРМ, ВГРМ, ВДРМ), размещенных определенным образом. Определяют координаты и высоту ВГРМ, пеленг ВКРМ и угла места ВГРМ относительно ЛА. Определяют рассогласование пеленга ВКРМ относительно ЛА и курса ВПП, рассогласование угла места ВГРМ относительно ЛА и заданного экипажем угла наклона траектории посадки для корректировки сигналов управления. Обеспечивается надежность системы посадки. 5 ил., 1 табл.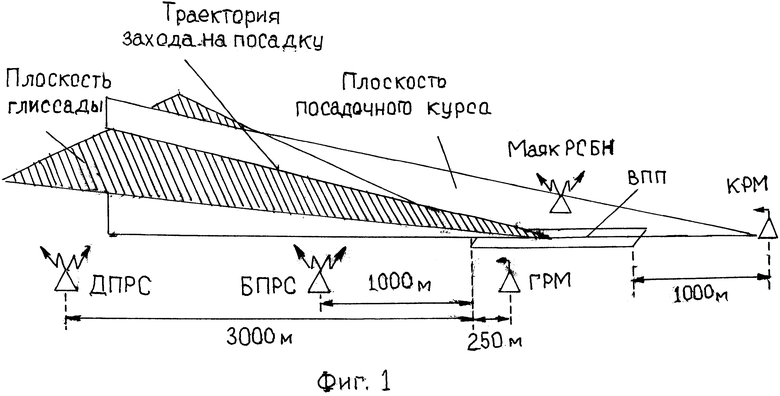
Способ управления летательным аппаратом (ЛА) при заходе на посадку, включающий измерение с помощью инерциальной навигационной системы (ИНС), систем воздушных сигналов (СВС), спутниковой навигационной системы (СНС) курса, крена и тангажа ЛА, угловой скорости ЛА, горизонтальной и вертикальной скорости ЛА, координат и высоты ЛА, формирование курса взлетно-посадочной полосы (ВПП) на основе уточненных координат высоты ЛА и координат высоты ВПП, формирование сигналов управления угловым положением ЛА по крену и тангажу и изменение в автоматическом или ручном режиме углового положения ЛА в соответствии со сформированными сигналами управления, отличающийся тем, что траекторию посадки с заданным экипажем углом наклона и совпадающую по направлению с курсом ВПП формируют с помощью курсового радиомаяка (КРМ), глиссадного радиомаяка (ГРМ) и дальномерного радиомаяка (ДРМ) или виртуальным образом непосредственно на борту ЛА относительно виртуального курсового радиомаяка (ВКРМ) при отсутствии на борту ЛА сигнала «Готовность курса»; или виртуального глиссадного радиомаяка (ВГРМ) при отсутствии на борту ЛА сигнала «Готовность глиссады»; или виртуального дальномерного радиомаяка (ВДРМ) при отсутствии на борту сигнала «Готовность дальности», при этом в соответствии со стандартной схемой размещения на аэродроме посадочного радиотехнического оборудования размещают ВКРМ в точке расположения КРМ, а ВГРМ и ВДРМ размещают под точкой стандартного размещения КРМ на продолжении заданной траектории посадки, определяют координаты ВКРМ, ВГРМ, ВДРМ и высоту ВГРМ, формируют пеленг ВКРМ и угол места ВГРМ относительно ЛА, причем сигнал управления угловым положением ЛА по крену формируют с учетом рассогласования пеленга ВКРМ относительно ЛА и курса ВПП, а сигнал управления угловым положением по тангажу формируют с учетом места ВГРМ относительно ЛА и заданного экипажем угла наклона траектории посадки.
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2520872C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2496131C1 |
| US 3968495 A1, 06.07.1976 | |||
| Способ дикторонезависимого распознавания фонемы в речевом сигнале | 2021 |
|
RU2763124C1 |
| WO 1991011730 A1, 08.08.1991. | |||

