Изобретение относится к машиностроению и может быть использовано в приводах машин.
Цель изобретения - повьшение надежности и КПД за счет снщсения трения контактирующих звеньев.
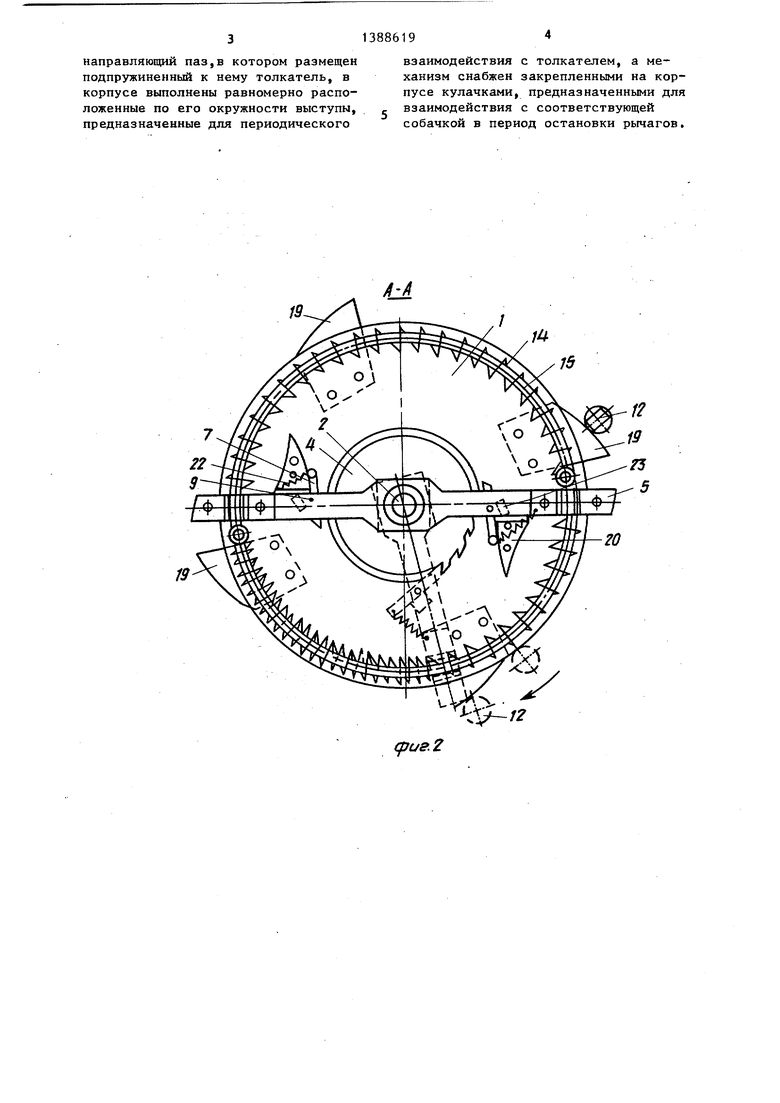
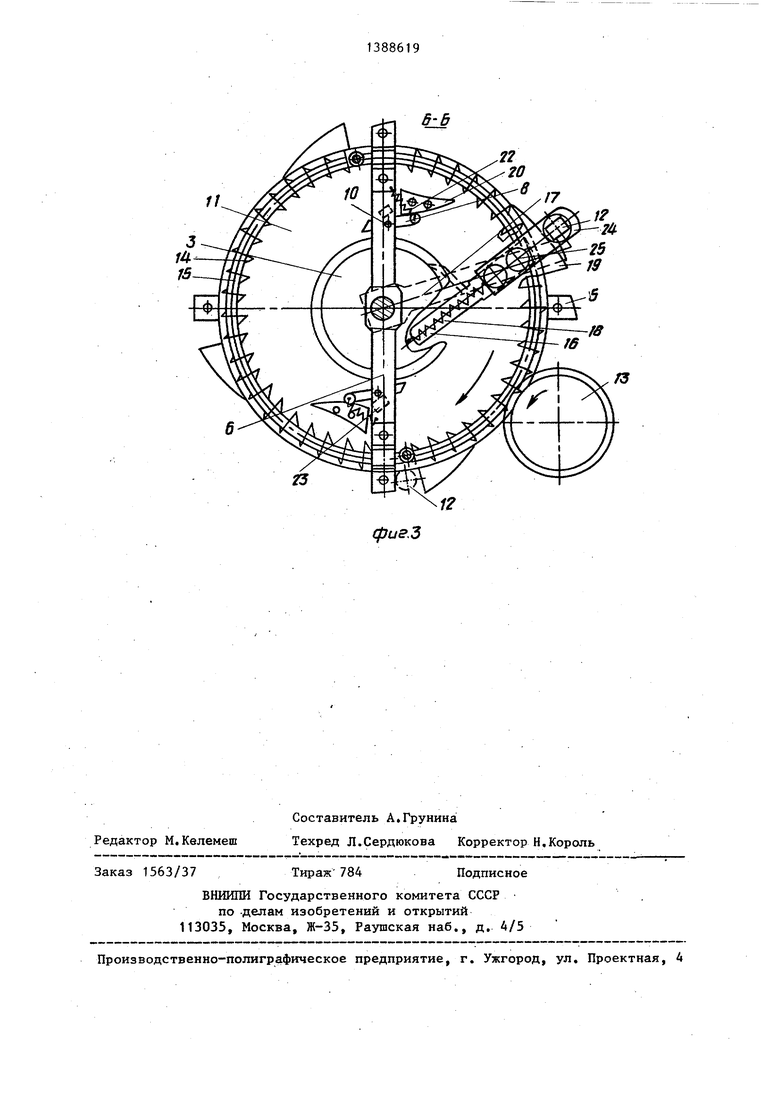
На фиг,1 изображен механизм для поддержания, вращения маховика, общий вид; на фиг,2 - разрез А-А на фиг,1; на фиг,3 - разрез Б-Б на фиг,1.
Механизм для поддержания вращения маховика содержит цилиндрический корпус 1, установленные на нем ведомый вал 2, аксиально закрепленные на валу 2 два храповых колеса 3 и 4, и-образные рычаги 5 и 6, равномерно расположенные по окружности вокруг соответствующего храпового колеса 3 и 4 в их плоскостях, собачки 7 и 8, закрепленные при помощи шарниров 9 и 10 на каждом рычаге 5 и 6, и ведущее звено в виде размещенного на зубчатом колесе 11 толкателя 12, ось которого перпендикулярна плоскости зубчатого колеса 11, Зубчатое колесо 11 кинематически связано с шестерней 13, закрепленной на двигателе (не показан),Каждый рычаг 5 и 6 связан с пружинами 14, размещенными на направляющих 15, которые в свою очередь закреплены на корпусе 1, На зубчатом колесе 1 выполнен направляющий паз 16, раеположенный под углом к диаметральной прямой 17 колеса 11, в котором установлен толкатель 12 с возможностью радиального перемещения. Механизм снабжен пружиной 18, прижимающей толкатель 12 к зубчатому колесу 11, на корпусе 1 выполнены выступы 19 с поверхностью которых поочередно взаимодействует толкатель 12 в конце хода рычагов 5 и 6 при заневоливании пружин 14, а также кулачками 20, с поверхностью которых взаимодействуют собачки 7 и 8 и в конце хода рычагов 5 и 6 под действием пружин 14, Рычаги 5, расположенные в плоскости храпового колеса 3, повернуты относительно рычагов 6, расположенных в плоскости Х рапового колеса 4, на угол, соответствующий длине сжатой пружины 18,
Между концами рычагов 5 и 6, закрепленных на валу 2, размещены соответствующие храповые колеса 3 или 4 и собачки 7 или В, а ось вращения каждого рычага 5 и 6 совпадает с осью вращения ведомого вала 2, на
котором установлен маховик 21, При этом каждая собачка 7 и 8 подпружинена к храповым колесам 3 и 4 пос- редством пружин 22. На каждом рычаге 5 и 6 закреплены упоры 23, ограничивающие ход собачек 7 и 8. Толкатель 12 закреплен на пластинах 24, связанных ограничителями 25, Механизм работает следующим образом.
При вращении двигателем шестерни
13вращается колесо 11, При этом толкатель 12 поочередно воздействует
на плечи рычагов 5 и 6, тем самым сжимая поочередно пружины 14, При этом толкатель 12 в конце хода рьта- гов 5 или 6 при заневоливании пружин
14наезжает на поверхности выступов 19 и, преодолевая сопротивление пружин 18jподымаясь над образующей колеса 11, пропускает рычаги 5 или 6, которые под действием пружин 14 пос- редством собачек 7 или 8 воздействуют
на зубья храповых колес 3 или 4, тем самым вращая ведомый вал 2, передавая ускоренное вращение маховику 21, В конце хода рычагов 5 или 6 под действием пружин 14 собачки 7 или 8 наезжают на кулачки 20 и выходят из зацепления с зубьями храповых колес 3 или 4,
Формула изобретения
Механизм для поддержания вращения маховика, содержащий цилиндрический корпус, установленные в нем ведомый вал, соосно закрепленные на н ем
храповые колеса, подпружиненные к корпусу рьиаги , равномерно расположенные по окружностям, коаксиальным соответствующим храповым колесам, собачки, шарнирно закрепленные на
соответствующих рычагах, ведущее звено в ..виде предназначенного для поочередного взаимодействия с рычагами в направлении деформации пружин зубчатого колеса и связанного с ним-толкателя, ось которого перпендикулярна плоскости зубчатого колеса, отличающийся тем, что, с целью повышения надежности и КПД, каждый рычаг выполнен U-образ- ным, закреплен на валу своими концами с возможностью поворота вокруг оси вала,храповые колеса размещены между концами соответствующих рычагов, в зубчатом колесе выполнен
направляющий паз,в котором размещен подпружиненный к нему толкатель, в корпусе выполнены равномерно расположенные по его окружности выступы, предназначенные для периодического
взаимодействия с толкателем, а механизм снабжен закрепленными на корпусе кулачками, предназначенными для взаимодействия с соответствующей собачкой в период остановки рычагов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический привод | 1990 |
|
SU1772493A1 |
| РЕВЕРСИВНЫЙ ПРИВОД | 1991 |
|
RU2064620C1 |
| ХРАПОВАЯ ПЕРЕДАЧА | 2006 |
|
RU2310786C1 |
| РЕДУКТОР ХРАПОВОЙ РЕВЕРСИВНЫЙ | 2003 |
|
RU2253780C1 |
| Инерционный гайковерт | 1983 |
|
SU1144866A1 |
| ХРАПОВАЯ ПЕРЕДАЧА | 2006 |
|
RU2321787C1 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| Механизм для преобразования колебательного движения во вращательное | 1957 |
|
SU114833A1 |
| МАЯТНИКОВЫЙ ДВИГАТЕЛЬ | 2018 |
|
RU2691888C1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444430C1 |
Изобретение относится к машиностроению и может быть использовано в приводах машин. Цель изобретения - повьппение надежности и ЩЦ за счет снижения трения контактирующих зве,/5 ньев. В цилиндрическом корпусе 1 установлен ведомый вал 2, храповые колеса 3 и 4, рычаги 5 и собачки 7, воздействующие на зубья храповых колес 3 и 4 при движении рычагов 5 под действием пружин 14.Зубчатое колесо 11 и толкатель 12 поочередно воздействуют на плечи рычагов 5 и 6, сжимая пружины 14. Под действием пружин 14 рычаги 5 и 5 воздействуют на зубья храповых колес 3 или 4. Б конце хода рычагов 5 или 6 собачки 7 и 8 наезжают на кулачки 20 и выходят из зацепления с зубьями храповых колес 3 или 4. 3 ил. 2 19 ±В с S (Л 00 СХ) СХ) 05 со
19
1
15
У
срие.2
11
а
Редактор М.Квлемеш
Составитель А.Грунина
Техред Л.Сердюкова Корректор Н.Король
Заказ 1563/37
Тираж 784
ВНИИПИ Государственного комитета СССР
по -делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
6-5
фиг.З
Подписное
| Механизм для поддержания вращения маховика | 1983 |
|
SU1208373A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
