ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства. Изобретение относится также к компьютерной программе, содержащей программный код для компьютера для осуществления способа согласно изобретению. Изобретение относится также к устройству калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства и к моторному транспортному средству, которое оснащено устройством.
УРОВЕНЬ ТЕХНИКИ
В современных транспортных средствах акселерометры используются для определения показателей ускорения, которые, в свою очередь, могут быть использованы для определения преобладающего сопротивления движению для упомянутых транспортных средств. Акселерометр может также именоваться датчиком ускорения. Эти акселерометры в настоящее время работают удовлетворительно. Акселерометры хорошо известны и во многих случаях физически соединены с ECU (электронный блок управления) транспортного средства для передачи информационных сигналов, содержащих показатели ускорения для транспортного средства, в упомянутый ECU. Упомянутый ECU выполнен с возможностью определения наклона поверхности движения для транспортного средства, например, уклона дороги, на основе упомянутых показателей ускорения. Наклон поверхности движения, определенный таким образом, может быть использован для вычисления преобладающего сопротивления движению для транспортного средства. Это вычисленное сопротивление движению может быть затем использовано в качестве входных данных для системы автоматического выбора передачи транспортного средства.
Разумеется, желательно, чтобы вычисленное сопротивление движению было определено как можно более точно, не в последнюю очередь для обеспечения возможности оптимизации системы автоматического переключения передач для транспортного средства. Существуют различные способы определения сопротивления движению транспортного средства. Обычно используемая модель содержит, в том числе, член, который определяется на основе наклона поверхности движения. В этом случае важно, чтобы акселерометр был подвергнут правильной калибровке для минимизации риска последующих ошибок в расчетах, которые выполняются для определения сопротивления движению.
Версия уравнения датчика акселерометра имеет вид:
as=av+gsinα+a0 (1)
где
as - значение, измеряемое акселерометром,
av - ускорение транспортного средства, например, измеряемое датчиками, связанными с колесами этого транспортного средства,
g - обычная гравитационная постоянная,
α - наклон поверхности движения транспортного средства,
a0 - постоянная, именуемая также нулевым уровнем датчика.
Уравнение сил, используемое в блоках управления транспортного средства, имеет вид:
Ft−Fair−Froll−g sin α=mav (2)
где
Ft - движущая сила транспортного средства, то есть сила от трансмиссии транспортного средства, действующая на его колеса,
Fair − сопротивление воздуха транспортному средству, определяемое по расчетной модели,
Froll - сопротивление качению транспортного средства, определяемое по расчетной модели.
Модель сопротивления движению Fdriveres транспортного средства имеет вид:
Fdriveres=Ft-mav (3).
Как и в случае многих различных типов датчиков, акселерометры подвергаются воздействию внешних и внутренних факторов. Это означает, что значение a0 может меняться с течением времени. Возможный пример такого фактора - дрейф датчика. Поэтому крайне важное значение имеет непрерывность поступления данных по a0, так чтобы наклон поверхности движения можно было определять по возможности с меньшей неопределенностью.
Существуют различные способы определения нулевого уровня a0 акселерометра.
В JP 7301641 описывается способ калибровки акселерометра транспортного средства. Способ содержит обнаружение неподвижного состояния транспортного средства. Компенсация нулевого уровня акселерометра осуществляется при одновременном выполнении условия практического отсутствия наклона поверхности дороги.
В JP 2009264794 описывается способ калибровки акселерометра на основе сравнения выходных данных акселерометра, полученных при одном и том же положении транспортного средства, например, на автостоянке, но в разное время.
В US 2008140292 и US 2007208524 описываются способы калибровки акселерометра в движущемся транспортном средстве.
В DE 4108081 описывается способ калибровки акселерометра при движении транспортного средства по наклонной поверхности.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание нового и эффективного способа калибровки акселерометра моторного транспортного средства.
Другой задачей изобретения является создание нового и эффективного устройства, а также новой и эффективной компьютерной программы для калибровки акселерометра моторного транспортного средства.
Дополнительной задачей изобретения является создание способа, устройства и компьютерной программы для осуществления автоматизированной калибровки акселерометра транспортного средства в ситуации, когда упомянутая калибровка происходит по существу в оптимальных условиях.
Дополнительной задачей изобретения является создание способа, устройства и компьютерной программы для обеспечения возможности обеспечения точного определения сопротивления движению для системы автоматического переключения передач транспортного средства.
Дополнительной задачей изобретения является создание способа, устройства и компьютерной программы для усовершенствования системы автоматического переключения передач транспортного средства.
Другой дополнительной задачей изобретения является достижение улучшенных рабочих характеристик моторного транспортного средства с системой автоматического переключения передач.
Решение этих задач обеспечивает способ по п. 1 формулы изобретения для калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства.
Согласно аспекту изобретения предлагается способ калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства, содержащий этап определения для упомянутого датчика ускорения характеристической постоянной, которая определяется во время заправки транспортного средства.
Согласно аспекту изобретения предполагается, что поверхность движения на заправочной станции по существу не имеет наклона, то есть ориентирована горизонтально. Так как согласно изобретению возможно установить, что транспортное средство заправляется или заправлялось, то акселерометр в этом случае может быть подвергнут калибровке путем определения характеристической постоянной для упомянутого датчика ускорения.
Согласно аспекту изобретения предлагается надежный способ калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства. Для установления, заправлялось ли транспортное средство, может быть использован прибор для измерения объема топлива, связанный с топливным баком транспортного средства. Это позволяет определять характеристическую постоянную упомянутого датчика ускорения путем прямого измерения с помощью датчика ускорения.
Способ может дополнительно содержать этап обеспечения показателя упомянутой заправки, когда количество поданного топлива превысит заданное значение. Упомянутый показатель может быть использован для активации калибровки датчика ускорения. Результатом является надежный способ определения характеристической постоянной упомянутого датчика ускорения. Упомянутое заданное значение для количества заправленного топлива может представлять собой любое требуемое значение, например, 200 или 300 литров. Согласно примеру упомянутое заданное значение для количества поданного топлива соответствует объему, который составляет 40-70% от общего объема топливного бака. Если общий объем топливного бака составляет, например, 600 литров, то упомянутое заданное значение может соответствовать 240-420 литрам. Согласно примеру упомянутое заданное значение для количества поданного топлива соответствует объему, составляющему более 70% от общего объема топливного бака, например, 80%. Согласно примеру упомянутое заданное значение для количества поданного топлива соответствует значению, составляющему менее 40% от общего объема топливного бака, например, 20%.
Преимущество не слишком низкого заданного значения для количества поданного топлива состоит в возможности предотвращения неправильной калибровки датчика ускорения в случае подачи небольшого количества топлива в бак, например, в чрезвычайной ситуации, связанной с использованием резервного топлива. В случае заправки не на заправочной станции предположение о том, что поверхность движения не имеет наклона и, следовательно, подходит для осуществления требуемого определения упомянутой характеристической постоянной, конечно, является более рискованным.
Преимущество не слишком высокого заданного значения для количества поданного топлива состоит в том, что в случае невозможности установить, что заправка осуществляется/состоялась, активации нового способа не происходит. Если заданное значение установлено слишком высоким, например, более 80%, то определение упомянутой характеристической постоянной, не будет осуществляться до тех пор, пока не начнется заправка при по существу пустом баке и бак не заполнится до по существу полного состояния.
Способ может дополнительно содержать этап определения упомянутой постоянной во время заправки. Преимущество в этом случае заключается в возможности активации и завершения нового способа без необходимости выключения транспортного средства. Определение упомянутой постоянной во время заправки обеспечивает более высокую универсальность способа, при котором работа двигателя транспортного средства во время заправки может продолжаться. Это означает возможность определения упомянутой постоянной с более высокой скоростью, чем в случае необходимости запуска двигателя перед таким определением.
Согласно версии способ может содержать этап определения упомянутой постоянной по существу сразу после завершения заправки. Преимущество в этом случае заключается в возможности активации и завершения нового способа без необходимости выключения транспортного средства. Определение упомянутой постоянной сразу после завершения заправки обеспечивает более высокую универсальность способа, при котором работа двигателя во время заправки может продолжаться. Это означает возможность определения упомянутой постоянной с более высокой скоростью, чем в случае необходимости запуска двигателя перед таким определением.
Способ может дополнительно содержать этап определения упомянутой постоянной во время запуска двигателя после заправки. Преимущество в этом случае заключается в возможности более безопасной заправки, так как выключать двигатель во время заправки является нормальной практикой. Преимуществом является и возможность выключения ряда подсистем транспортного средства во время заправки и, как следствие, экономия энергии по сравнению со случаем продолжения работы и потребления электрического тока.
Преимущество определения упомянутой характеристической постоянной во время заправки, сразу после завершения заправки или во время запуска двигателя после заправки состоит в том, что акселерометр может быть подвергнут калибровке перед троганием транспортного средства с места. Это позволяет расширить возможности вычисления сопротивления движению транспортного средства и обеспечивает возможность расчета по существу оптимального варианта передачи для системы автоматического переключения передач транспортного средства.
Способ может дополнительно содержать этап определения упомянутой постоянной в заданное время после запуска двигателя после заправки. Упомянутая характеристическая постоянная не обязательно должна быть определена во время заправки или во время запуска двигателя, при соответствующих обстоятельствах ее определение может быть осуществлено с определенной задержкой. Это обеспечивает более высокую универсальность способа.
Способ может содержать этап обеспечения упомянутой постоянной a0, полученной для системы автоматического переключения передач в результате определения. Система переключения передач может представлять собой автоматизированную систему передачи, содержащую, в том числе, коробку передач. Приведенные выше уравнения 1, 2 и 3 могут быть использованы для вычисления сопротивления движению Fdriveres на основе полученной в результате определения упомянутой постоянной a0. Сопротивление движению Fdriveres является параметром системы автоматического переключения передач транспортного средства 100. Калибровка акселерометра, то есть получение в результате определения упомянутой постоянной a0 согласно аспекту изобретения позволяет вычислять более точное значение сопротивления движению Fdriveres. Это обеспечивает возможность более оптимального управления системой автоматического переключения передач транспортного средства по сравнению с акселерометром, не подвергнутым калибровке. Определение упомянутой постоянной a0 позволяет согласно изобретению достигать более высокой точности при вычислении сопротивления движению Fdriveres.
Согласно аспекту изобретения полученная в результате определения упомянутая постоянная может быть использована для определения наклона поверхности движения для транспортного средства. Упомянутый наклон может быть затем использован для определения сопротивления движению для транспортного средства. Согласно примеру осуществления способ может содержать этап определения упомянутого наклона на основе полученной в результате определения упомянутой постоянной. Приведенное выше уравнение 1 может быть использовано для решения относительно уклона дороги (наклона поверхности движения транспортного средства), так как другие члены (as, av, g и a0) являются известными. Это означает, что датчики, которыми транспортное средство уже снабжено, могут быть использованы для надежного определения уклона дороги, когда транспортное средство приводится в движение или уже в движении.
Согласно аспекту изобретения предлагается способ определения сопротивления движению для транспортного средства, снабженного датчиком ускорения, содержащий этапы:
- определения характеристической постоянной для упомянутого датчика ускорения,
- определения упомянутой постоянной во время заправки транспортного средства,
- определения наклона поверхности движения для упомянутого транспортного средства на основе полученной в результате определения упомянутой постоянной и
- определения упомянутого сопротивления движению для транспортного средства на основе полученного в результате определения упомянутого наклона.
Способ может содержать этап определения упомянутой постоянной при достижении определенных заданных условий. Проведение проверки определенных заданных условий может обеспечить гарантию нахождения транспортного средства на самом деле в неподвижном состоянии на поверхности движения, не имеющей наклона.
Такая проверка может быть основана на вычисленном значении наклона поверхности движения. В случае небольшого или по существу нулевого (0) значения α может быть инициирован новый способ, то есть упомянутая постоянная a0 может быть определена в установленном состоянии заправки. Это означает, что член g sin в приведенном выше уравнении 1 может быть принят равным нулю (0).
Такая проверка может быть основана на измеренном значении преобладающей скорости транспортного средства. В случае небольшого или по существу нулевого (0) значения этой величины может быть инициирован новый способ, то есть упомянутая постоянная a0 может быть определена в установленном состоянии заправки. Это означает, что член av в приведенном выше уравнении 1 может быть принят равным нулю (0).
Упомянутые показатели ускорения могут быть основаны на ускорении av транспортного средства в сочетании с наклоном α поверхности движения в продольном направлении транспортного средства, и/или упомянутая характеристическая постоянная a0 датчика ускорения может именоваться показателем ускорения датчика ускорения.
Согласно версии адаптация упомянутая постоянной a0 может быть выполнена с помощью алгоритма:
n(k)=n(k-1)+(s(k)-n(k-1))β (4)
где
n(k) - новый нулевой уровень
s(k) - нулевой уровень, считываемый акселерометром, n(k-1) - старый нулевой уровень, а β - фактор адаптации между 0 и 1, например, 0,1.
Способ прост для реализации в существующих моторных транспортных средствах. Программное обеспечение для калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства согласно изобретению может быть установлено в блок управления транспортного средства во время изготовления транспортного средства. Покупатель транспортного средства, таким образом, может иметь возможность выбора функции способа в качестве опции. В другом варианте изобретения программное обеспечение, которое содержит программный код для применения нового способа калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства, может быть установлено в блок управления транспортного средства по случаю модернизации на станции технического обслуживания, когда программное обеспечение может быть загружено в память блока управления. Поэтому реализация нового способа является экономически эффективной, в частности, так как согласно аспекту изобретения не требует установки никаких дополнительных компонентов или датчиков в транспортном средстве. Соответствующим оборудованием транспортное средство уже снабжено. Таким образом, изобретение представляет экономически эффективное решение проблем, обозначенных выше.
Программное обеспечение, содержащее программный код для калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства, легко обновить или заменить. Различные части программного обеспечения, содержащего программный код для калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства, также могут быть заменены независимо одна от другой. Эта модульная конфигурация выгодна с точки зрения технического обслуживания.
Согласно аспекту изобретения предлагается устройство для калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства, выполненное с возможностью определение характеристической постоянной для упомянутого датчика ускорения. Упомянутое устройство содержит средство для определения упомянутой постоянной во время заправки транспортного средства.
Устройство может дополнительно содержать средство для обеспечения показателя упомянутой заправки, когда количество поданного топлива превысит заданное значение.
Устройство может дополнительно содержать средство для определения упомянутой постоянной во время заправки или по существу сразу после завершения заправки.
Устройство может дополнительно содержать средство для определения упомянутой постоянной во время запуска двигателя после заправки или в заданное время после запуска двигателя после заправки.
Устройство может содержать средство для обеспечения упомянутой постоянной, определяемой для системы автоматического переключения передач.
Согласно аспекту изобретения полученная в результате определения упомянутая постоянная может быть использована для определения наклона поверхности движения для транспортного средства. Упомянутый наклон может быть затем использован для определения сопротивление движению для транспортного средства. Согласно примеру осуществления устройство может содержать средство для определения упомянутого наклона на основе полученной в результате определения упомянутой постоянной.
Согласно аспекту изобретения предлагается способ определения сопротивление движению для транспортного средства, снабженного датчиком ускорения, содержащий:
- средство для определения характеристической постоянной для упомянутого датчика ускорения,
- средство для определения упомянутой постоянной во время заправки транспортного средства,
- средство для определения наклона поверхности движения для упомянутого транспортного средства на основе полученной в результате определения упомянутой постоянной и
- средство для определения упомянутого сопротивления движению для транспортного средства на основе полученного в результате определения упомянутого наклона.
Устройство может содержать средство для определения упомянутой постоянной при достижении определенных заданных условий.
Упомянутые показатели ускорения основаны на ускорении транспортного средства в сочетании с наклоном поверхности движения в продольном направлении транспортного средства, и/или упомянутая характеристическая постоянная a0 датчика ускорения относится к показателю ускорения датчика ускорения.
Решение вышеупомянутых задач также обеспечивает моторное транспортное средство, снабженное устройством калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства. Транспортное средство может быть грузовым автомобилем, автобусом или легковым автомобилем.
Согласно аспекту изобретения предлагается компьютерная программа для калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства, которая содержит программный код для обеспечения выполнения электронным блоком управления или другим компьютером, соединенным с электронным блоком управления, этапов по любому из пп. 1-7 формулы изобретения.
Согласно аспекту изобретения предлагается компьютерная программа для калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства, которая содержит программный код, хранимый на считываемом компьютером носителе, обеспечивающий выполнение электронным блоком управления или другим компьютером, соединенным с электронным блоком управления, этапов по любому из пп. 1-7 формулы изобретения.
Согласно аспекту изобретения предлагается компьютерный программный продукт, содержащий программный код, хранимый на считываемом компьютером носителе, для выполнения этапов способа по любому из пп. 1-7 формулы изобретения, когда упомянутая программа выполняется на электронном блоке управления или на другом компьютере, соединенном с электронным блоком управления.
Дополнительные задачи преимущества и новые признаки настоящего изобретения станут очевидны специалисту в данной области техники из приводимого ниже подробного описания, а также при осуществлении изобретения. Следует отметить, что приведенное ниже описание изобретения не ограничивается конкретными описанными формами. Специалисты, имеющие доступ к излагаемым в данном документе сведениям, распознают дополнительные приложения, модификации и включения в других областях техники, к которым относится изобретение, в пределах объема изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более полного понимания настоящего изобретения и дополнительных задач и преимуществ этого изобретения приводимое ниже подробное описание сопровождается прилагаемыми чертежами, на которых одни и те же ссылочные позиции обозначают подобные элементы на различных видах и на которых:
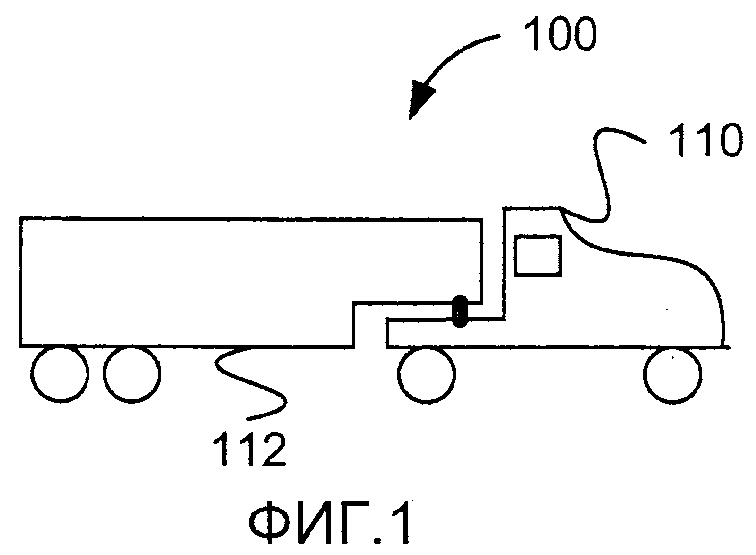
Фиг. 1 схематически иллюстрирует транспортное средство согласно примеру осуществления изобретения;
Фиг. 2 схематически иллюстрирует подсистему для транспортного средства, изображенного на фиг. 1, согласно примеру осуществления изобретения;
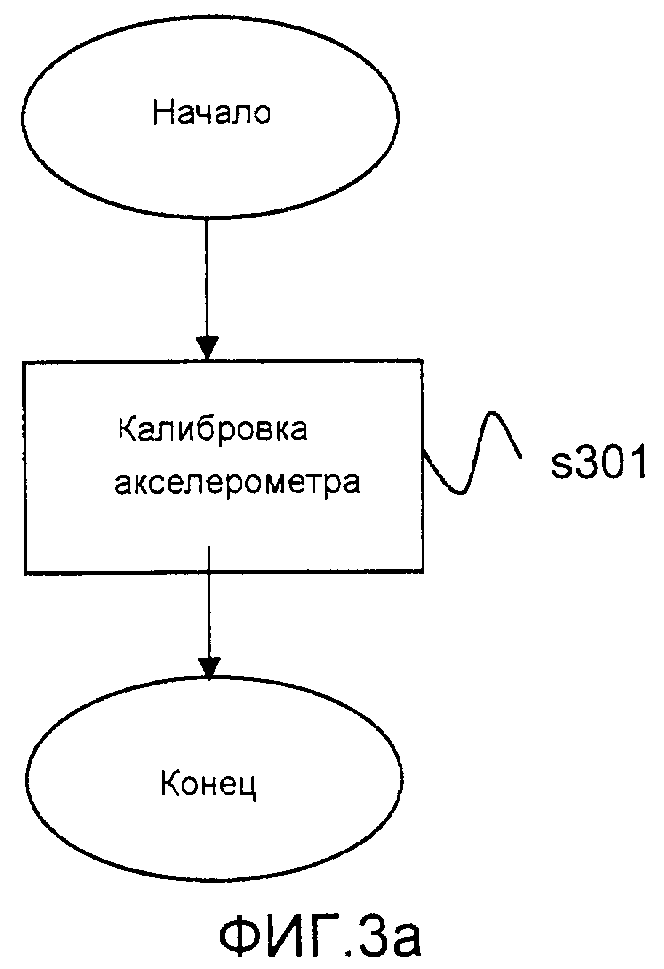
Фиг. 3a - блок-схема последовательности операций способа согласно примеру осуществления изобретения;
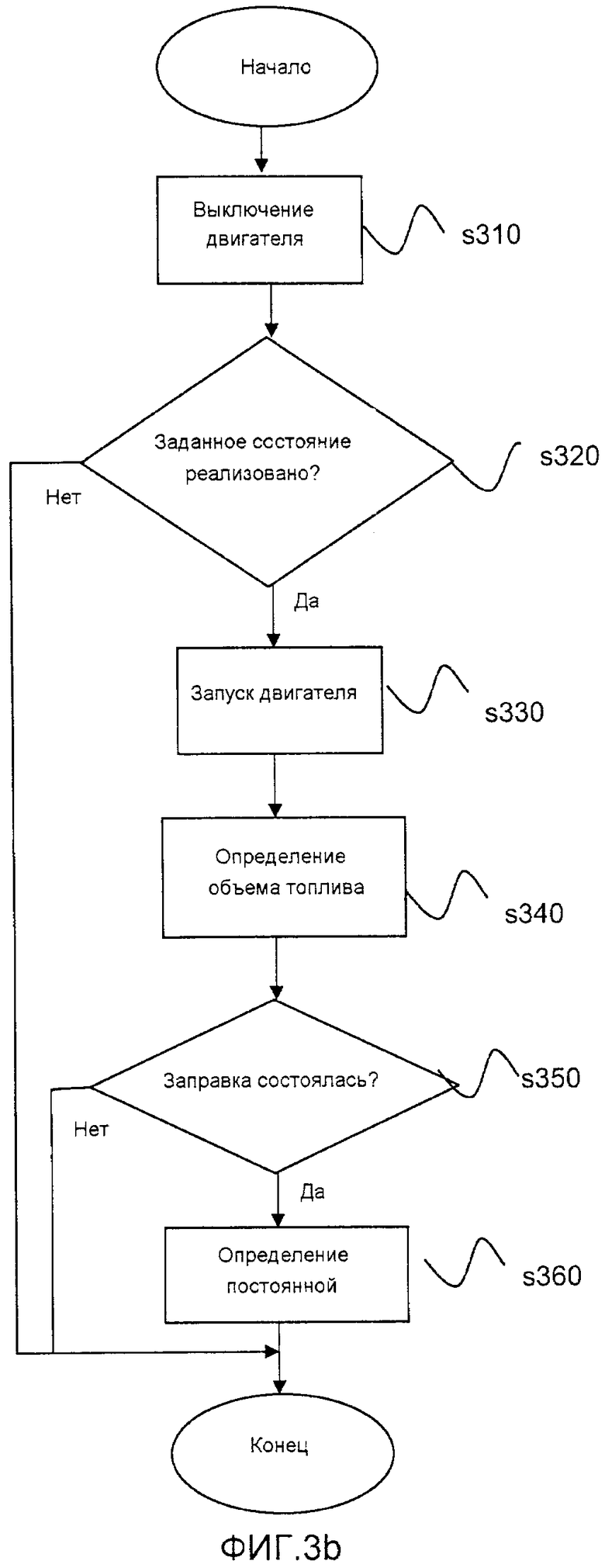
Фиг. 3b - более подробная блок-схема последовательности операций способа согласно примеру осуществления изобретения; и
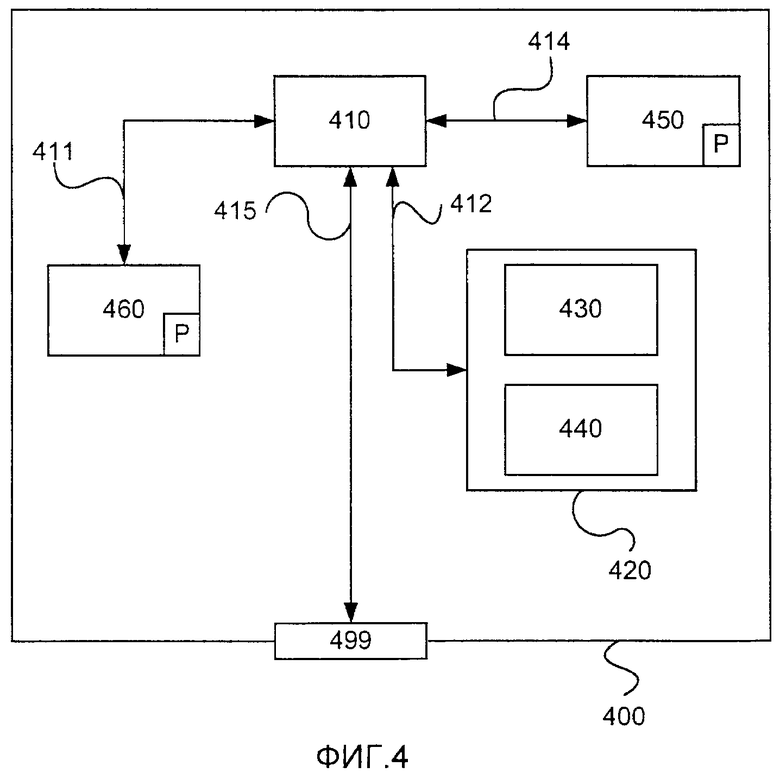
Фиг. 4 схематически иллюстрирует компьютер согласно примеру осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 представлен вид сбоку транспортного средства 100. Представленное транспортное средство 100 содержит тягач 110 и прицеп 112. Транспортное средство может тяжелым транспортным средством, например, грузовым автомобилем или автобусом. В другом варианте изобретения транспортное средство может быть легковым автомобилем.
Термин "линия" относится в данном документе к линии связи, которая может быть физическим соединением, таким как оптоэлектронная линия связи, или нефизическим соединением, таким как беспроводное соединение, например, линия радиосвязи или линия микроволновой связи.
Термин "заправочная станция" относится в данном документе к установке, где транспортное средство 100 может пополнять запас топлива. Примером заправочной станции является так называемая бензоколонка, где транспортные средства могут заправляться, например, дизельным топливом, бензином, этанолом, рапсовым маслом, рапсовым метиловым эфиром или другим подходящим органическим, полусинтетическим или синтетическим топливом.
Аспект изобретения может быть использован применительно к транспортному средству, которое работает на газе для транспортного средства. Это означает, что давление газа в топливном баке упомянутого транспортного средства может быть использовано для калибровки упомянутого акселерометра. Это позволяет установить, состоялась ли заправка транспортного средства, например, путем сравнения в два разных момента времени давления газа в топливном баке, которое указывает на количество топлива, аналогично случаю транспортного средства, которое работает, например, на дизельном топливе.
Аспект изобретения, может быть использован применительно к гибридному транспортному средству, работающему на электрическом токе. В этом случае для калибровки упомянутого акселерометра может быть использован уровень заряда аккумулятора. Это позволяет установить, состоялась ли зарядка, по меньшей мере, одного из аккумуляторов гибридного транспортного средства путем сравнения в два разных момента времени уровня заряда упомянутого аккумулятора, который указывает на доступную электрическую мощность аналогично случаю транспортного средства, которое работает, например, на дизельном топливе.
На фиг. 2 представлена подсистема 299 транспортного средства 100 согласно примеру осуществления изобретения. Подсистема 299 установлена на тягаче 110. Подсистема 299 состоит из первого блока 200 управления, который может также именоваться блоком ECU.
Первый блок 200 управления выполнен с возможностью связи с акселерометром 220 через линию 221. Акселерометр 220 выполнен с возможностью определения показателей as ускорения для транспортного средства 100 и непрерывной передачи в первый блок 200 управления сигналов, которые содержат информацию об этих показателях as ускорения. Акселерометр 220 имеет так называемый нулевой уровень (см. также уравнение 1 выше), именуемый в данном документе нулевым уровнем a0.
Первый блок 200 управления выполнен с возможностью связи с датчиком скорости 230 через линию 231. Датчик 230 скорости выполнен с возможностью определения скорости вращения колеса транспортного средства. Согласно версии транспортное средство 100 может быть оснащено рядом датчиков 230 скорости, каждый из которых выполнен с возможностью определения преобладающей скорости вращения соответствующего колеса транспортного средства. Датчик 230 скорости выполнен с возможностью непрерывной передачи в первый блок 200 управления сигналов, которые содержат информацию о преобладающих скоростях вращения колеса. Первый блок 200 управления выполнен с возможностью определения ускорения av транспортного средства на основе упомянутых передаваемых сигналов.
Первый блок управления 200 выполнен с возможностью связи с датчиком 240 уровня топлива через линию 241. Датчик 240 уровня топлива выполнен с возможностью определения преобладающего уровня топлива в топливном баке транспортного средства 100. Датчик 240 уровня топлива выполнен с возможностью непрерывной передачи в первый блок 200 управления сигналов, которые содержат информацию о преобладающем уровне топлива. Первый блок 200 управления выполнен с возможностью установления, продолжается ли заправка транспортного средства или завершена. Для этого первый блок 200 управления выполнен с возможностью определения постоянной a0 во время заправки транспортного средства 100.
Первый блок 200 управления выполнен с возможностью связи с датчиком 250 крутящего момента двигателя через линию 251. Датчик 250 крутящего момента выполнен с возможностью определения преобладающего крутящего момента двигателя транспортного средства 100. Это может быть сделано, например, путем непрерывного определения количества дизельного топлива, впрыскиваемого в камеру сгорания двигателя транспортного средства. Датчик 250 крутящего момента выполнен с возможностью непрерывной передачи в первый блок 200 управления сигналов, которые содержат информацию о преобладающем крутящем моменте двигателя транспортного средства. Первый блок 200 управления выполнен с возможностью определения на основе упомянутых сигналов члена Ft в приведенном выше уравнении 2.
Первый блок 200 управления выполнен с возможностью непрерывного вычисления как преобладающего сопротивления Fair воздуха, так и сопротивления Froll качению (см. уравнение 2 выше) с помощью соответствующей хранимой вычислительной модели или другим подходящим способом.
Первый блок 200 управления выполнен с возможностью связи с датчиком 260 давления через линию 261. Датчик 260 давления выполнен с возможностью непрерывного измерения давления воздуха P, окружающего транспортное средство 100. Датчик 260 давления выполнен с возможностью непрерывной передачи в первый блок 200 управления сигналов, которые содержат информацию об упомянутом давлении воздуха, окружающем транспортное средство. Первый блок 200 управления выполнен с возможностью непрерывного использования упомянутых сигналов, передаваемых в качестве основы для определения преобладающего сопротивления Fair воздуха с помощью модели, хранимой для этой цели.
Первый блок 200 управления выполнен с возможностью связи с датчиком 270 температуры через линию 271. Датчик 270 температуры выполнен с возможностью непрерывного измерения преобладающей температуры T окружающей среды транспортного средства. Датчик 270 температуры выполнен с возможностью непрерывной передачи в первый блок 200 управления сигналов, которые содержат информацию о преобладающей температуре T окружающей среды. Первый блок 200 управления выполнен с возможностью непрерывного использования упомянутых сигналов, передаваемых в качестве основы для определения преобладающего сопротивления Fair воздуха с помощью модели, хранимой для этой цели.
Согласно версии первый блок 200 управления выполнен с возможностью непрерывного определения преобладающего сопротивления Fair воздуха с помощью модели, хранимой для этой цели, на основе упомянутого давления воздуха, окружающего транспортное средство, и/или упомянутой преобладающей температуры T окружающей среды транспортного средства.
Первый блок 200 управления выполнен с возможностью связи со средством 280 определения массы. Средство 280 определения массы выполнено с возможностью определения массы m транспортного средства 100. Это может быть сделано, например, путем измерения давления, по меньшей мере, в одном из пневматических упругих элементов системы подвески транспортного средства традиционным способом или другим подходящий способом. Это позволяет определить массу m транспортного средства. Средство 280 определения массы выполнено с возможностью передачи в первый блок 200 управления сигналов, которые содержат информацию о массе m транспортного средства. Первый блок управления 200 выполнен с возможностью непрерывного использования упомянутых сигналов, передаваемых в качестве основы для определения преобладающего сопротивления Froll качению с помощью модели, хранимой для этой цели.
Первый блок 200 управления выполнен согласно версии с возможностью использования принимаемых сигналов, которые содержат уровни топлива в топливном баке транспортного средства в качестве основы для определения значения характеристической постоянной a0 для акселерометра 220 для обеспечения возможности калибровки акселерометра согласно новому способу. Таким образом, первый блок 200 управления выполнен с возможностью установления, находится ли транспортное средство 100 на заправочной станции, в случае которого предполагается, что оно находится на поверхности движения, не имеющей наклона.
Второй блок управления 210 выполнен с возможностью связи с первым блоком 200 управления через линию 201. Второй блок 210 управления может также именоваться блоком ECU. Второй блок 210 управления может быть с возможностью разъединения соединен с первым блоком 200 управления. Второй блок 210 управления может быть внешним по отношению транспортного средства 100 блоком управления. Второй блок 210 управления может быть выполнен с возможностью выполнения этапов нового способа согласно изобретению. Второй блок 210 управления может быть использован для перекрестной загрузки программного обеспечения в первый блок 200 управления, в частности, программного обеспечения для применения нового способа. В другом варианте изобретения второй блок 210 управления может быть предназначен для связи с первым блоком 200 управления через внутреннюю сеть в транспортном средстве. Второй блок 210 управления может быть выполнен с возможностью выполнения по существу тех же функций, что и первый блок 200 управления, например, с использованием принимаемых сигналов, которые содержат уровни топлива в топливном баке транспортного средства в качестве основы для определения значения характеристической постоянной a0 для акселерометра 220 и, следовательно, обеспечения возможности калибровки акселерометра 220.
На фиг. 3a представлена схематическая блок-схема последовательности операций способа для калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства согласно примеру осуществления изобретения. Способ содержит первый этап s301, содержащий этапы определения характеристической постоянной для упомянутого датчика ускорения и определения упомянутой постоянной во время заправки транспортного средства. После этапа s301 способ заканчивается.
На фиг. 3b представлена схематическая блок-схема последовательности операций способа для калибровки датчика ускорения для определения показателей ускорения моторного транспортного средства согласно примеру осуществления изобретения.
Способ содержит первый этап s310, содержащий этап выключения двигателя транспортного средства. Это, как правило, делается водителем транспортного средства, выключающим зажигание, например, с помощью ключа или нажатием кнопки в пространстве водителя транспортного средства. Выключение зажигания регистрируется в первом блоке 200 управления с помощью средства, предусмотренного для этой цели. В то же самое время значение Fuellevel1, которое представляет преобладающий уровень топлива в топливном баке транспортного средства, сохраняется в памяти первого блока 200 управления. Это делается согласно версии с помощью датчика 240 уровня топлива, передающего информацию об уровне топлива в топливном баке транспортного средства в первый блок 200 управления, блок которого согласно версии преобразует упомянутый Fuellevel1 в соответствующий Fuelvolumel и сохраняет в своей памяти значение, которое представляет упомянутый Fuelvolumel. Специалистам понятно, что упомянутый Fuellevel1 соответствует упомянутому Fuelvolumel. Термины "уровень топлива" и "объем топлива" используются в данном документе как синонимы, так как они оба представляют в этом случае объем топлива, фактически преобладающий в топливном баке транспортного средства. За этапом s310 следует этап s320.
Этап s320 способа содержит этап установления, реализовано ли, по меньшей мере, одно заданное состояние. Это может также именоваться установлением достижения, по меньшей мере, одного заданного состояния. Этап s320 является необязательным. Согласно примеру осуществления этап s320 нового способа может быть пропущен. Этап s320 служит в качестве функции предварительной проверки, позволяющей установить, вероятно ли, что транспортное средство находится на заправочной станции и поэтому на поверхности движения, предположительно не имеющей наклона, что является выгодным с точки зрения калибровки согласно новому способу.
В первом примере одно из упомянутых заданных состояний может быть связано с преобладающей скоростью транспортного средства. Если преобладающая скорость транспортного средства равна нулю (0) или по существу нулю (0), то упомянутое заданное состояние реализовано, в противном случае - нет.
Во втором примере одно из упомянутых заданных состояний может быть связано с наклоном α поверхности движения транспортного средства. Наклон α поверхности движения транспортного средства может быть определен самыми разными способами. Если упомянутый наклон поверхности движения α, полученный в результате определения, равен нулю (0), по существу нулю (0) или ниже заданного значения, например, 2°, упомянутое заданное состояние реализовано, в противном случае - нет.
Если упомянутое, по меньшей мере, одно заданное состояние реализовано, то выполняется следующий этап s330 способа. Если упомянутое, по меньшей мере, одно состояние не реализовано, то способ заканчивается. Согласно примеру способ заканчивается, если, по меньшей мере, одно из ряда заданных состояний не реализовано.
Этап s330 способа содержит этап запуска двигателя транспортного средства. Это, как правило, делается водителем транспортного средства, включающим зажигание, например, с помощью ключа или нажатием кнопки в пространстве водителя транспортного средства. Включение зажигания регистрируется в первом блоке управления 200 с помощью средства, предусмотренного для этой цели. За этапом s330 следует этап s340.
Этап s340 способа содержит этап сохранения в памяти первого блока 200 управления значения Fuellevel2, которое представляет преобладающий уровень топлива в топливном баке транспортного средства. Это делается согласно версии с помощью датчика 240 уровня топлива, передающего информацию об уровне топлива в топливном баке транспортного средства в первый блок 200 управления, блок которого согласно версии преобразует упомянутый Fuellevel2 в соответствующий Fuelvolume2 и сохраняет в своей памяти значение, которое представляет упомянутый Fuelvolume2. Специалистам понятно, что упомянутый Fuellvel2 соответствует в этом случае упомянутому Fuelvolume2. За этапом s340 следует этап s350.
Этап s350 способа содержит этап установления, состоялась ли заправка транспортного средства. Это может быть сделано путем сравнения полученных в результате определения Fuellevel1 и Fuellevel2 или Fuelvolumel и Fuelvolume2. Разность между Fuellevel2 и Fuellevel1, превышающая заданное значение Thfuel, свидетельствует о том, что заправка состоялась. Разность между Fuellevel2 и Fuellevel1 ниже упомянутого заданного значения Thfuel свидетельствует о том, что заправка не состоялась. Значение Thfuel является любым подходящим значением. Если установлено, что заправка состоялась, то выполняется следующий этап s360 способа. Если установлено, что заправка не состоялась, то способ заканчивается.
Следует отметить, что этап установления, реализовано ли, по меньшей мере, одно заданное состояние, в частности, этап s320 может быть выполнен после любого этапа, но перед этапом s360, то есть после этапа s330, s340 или s350.
Этап s360 способа содержит этап определения характеристической постоянной a0 для акселерометра 220. Согласно новому способу на основе приведенного выше уравнения 1 значение величины as сигнала измерения от акселерометра 220 в этом случае равно характеристической постоянной a0 для акселерометра 220. Так как ускорение av транспортного средства и наклон α поверхности движения в этом случае принимаются равными нулю (0), то характеристическая постоянная a0 может быть определена согласно аспекту изобретения. После этапа s360 способ заканчивается.
Фиг. 4 является схематической иллюстрацией версии устройства 400. Блоки 200 и 210 управления 200 и 210, описанные со ссылками на фигуры 2, в версии содержат устройство 400. Устройство 400 содержит энергонезависимую память 420, блок 410 обработки данных и память 450 для чтения/записи. Энергонезависимая память 420 имеет первый элемент 430 памяти, в котором хранится компьютерная программа, например, операционная система, для управления функцией устройства 200. Устройство 400 дополнительно содержит контроллер шины, последовательный порт связи, средство ввода/вывода, аналого-цифровой преобразователь, блок ввода и передачи времени и даты, счетчик событий и контроллер прерываний (не показан). Энергонезависимая память 420 имеет также второй элемент 440 памяти.
Предлагаемая компьютерная программа P содержит подпрограммы для калибровки датчика 220 ускорения для определения показателей ускорения моторного транспортного средства 100 согласно аспекту нового способа. Программа P содержит подпрограммы для определения характеристической постоянной a0 для упомянутого датчика ускорения во время заправки транспортного средства 100. Программа P содержит подпрограммы для обеспечения показателя упомянутой заправки, когда количество поданного топлива превышает заданное значение Thfuel согласно примеру осуществления изобретения. Программа P содержит подпрограммы для определения упомянутой постоянной a0 во время заправки или по существу сразу после завершения заправки или для определения упомянутой постоянной a0 при запуске двигателя после заправки или в заданное время после того, как двигатель был запущен после заправки. Программа P содержит подпрограммы для обеспечения упомянутой постоянной a0, определяемой для системы автоматического переключения передач. Программа P содержит подпрограммы для определения упомянутого наклона α на основе упомянутой постоянной a0, полученной в результате определения. Программа P содержит подпрограммы для определения упомянутой постоянной a0 при преобладании определенных заданных условий. Согласно версии упомянутые показатели ускорения основаны на ускорении av транспортного средства и наклоне α поверхности движения продольном направлении транспортного средства. Согласно версии упомянутая характеристическая постоянная a0 упомянутого датчика ускорения относится к показателю ускорения датчика ускорения. Программа P может храниться в исполняемой форме или в сжатой форме в памяти 460 и/или в памяти 450 для чтения/записи.
Описание блока 410 обработки данных как выполнения определенной функции означает, что блок 410 обработки данных осуществляет определенную часть программы, хранимой в памяти 460, или определенную часть программы, хранимой в памяти 450 для чтения/записи 450.
Устройство 410 обработки данных может взаимодействовать с портом 499 данных через шину 415 данных. Энергонезависимая память 420 предназначена для связи с блоком 410 обработки данных через шину 412 данных. Отдельная память 460 предназначена для взаимодействия с блоком 410 обработки данных через шину 411 данных. Память 450 для чтения/записи выполнена с возможностью взаимодействия с блоком 410 обработки данных через шину 414 данных. Порт 499 данных может иметь, например, соединенные с ним линии 201, 221, 231, 241, 251, 261 и 271 (см. фиг. 2).
При приеме данных портом 499 данных они временно хранятся во втором элементе 440 памяти. При временном хранении принимаемых входных данных блок 410 обработки данных готов к осуществлению исполнения кода, как описывается выше. Согласно версии сигналы, принимаемые портом 499 данных, содержат информацию о показателях ускорения. Эти показатели ускорения могут быть измерены акселерометром 220. Согласно версии сигналы, принимаемые портом 499 данных, содержат информацию о преобладающей скорости одного или более колес транспортного средства. Согласно версии сигналы, принимаемые портом 499 данных, содержат информацию о преобладающем уровне топлива, например, Fuellevel1 и Fuellevel2 в топливном баке транспортного средства 100. Согласно версии сигналы, принимаемые портом 499 данных, содержат информацию о преобладающем крутящем моменте двигателя транспортного средства 100. Согласно версии сигналы, принимаемые портом 499 данных, содержат преобладающее давление P воздуха, окружающего транспортное средство 100. Согласно версии сигналы, принимаемые портом 499 данных, содержат преобладающее давление воздуха в системе подвески транспортного средства 100. Согласно версии сигналы, принимаемые портом 499 данных, содержат информацию о преобладающей температуре T окружающей среды. Сигналы, принимаемые портом 499 данных, могут быть использованы устройством 400 для определения характеристической постоянной a0 для упомянутого датчика ускорения во время заправки транспортного средства 100.
Сигналы, принимаемые портом 499 данных, могут быть использованы устройством 400 для вычисления и/или определения сопротивления движению Fdriveres для транспортного средства 100. Сигналы, принимаемые портом 499 данных, могут быть использованы устройством 400 для определения наклона α поверхности движения для транспортного средства 100. Части описываемых в данном документе способов могут быть осуществлены устройством 400 посредством блока 410 обработки данных, который выполняет программу, хранимую в памяти 460 или в памяти 450 для чтения/записи. При выполнении программы устройством 400 исполняются способы, описываемые в данном документе.
Приведенное выше описание предпочтительных примеров осуществления настоящего изобретения предоставлено в иллюстративных и описательных целях. Оно не носит исчерпывающего характера и не ограничивает изобретение описанными вариантами. Многие модификации и варианты, очевидно, будут предложены самими специалистами в данной области техники. Примеры осуществления были выбраны и описаны для обеспечения лучшего объяснения принципов изобретения и его практического применение и поэтому позволяют специалистам понять изобретение для различных примеров осуществления и с различными модификациями, подходящими для предполагаемого использования.
Изобретение относится к калибровке датчика ускорения. Способ калибровки датчика ускорения для определения показателей ускорения транспортного средства содержит этап определения характеристической постоянной для датчика ускорения. При этом устанавливают путем сравнения первого уровня топлива и второго уровня топлива, состоялась ли заправка транспортного средства. Во время заправки определяют упомянутую постоянную, которая служит в качестве нулевого уровня для датчика ускорения. Устройство калибровки датчика ускорения, определяющее характеристическую постоянную для датчика ускорения, содержит средство установления, состоялась ли заправка транспортного средства и средство определения упомянутой постоянной во время заправки. Моторное транспортное средство оснащено упомянутым устройством. Достигается оптимизация калибровки. 3 н. и 13 з.п. ф-лы, 4 ил.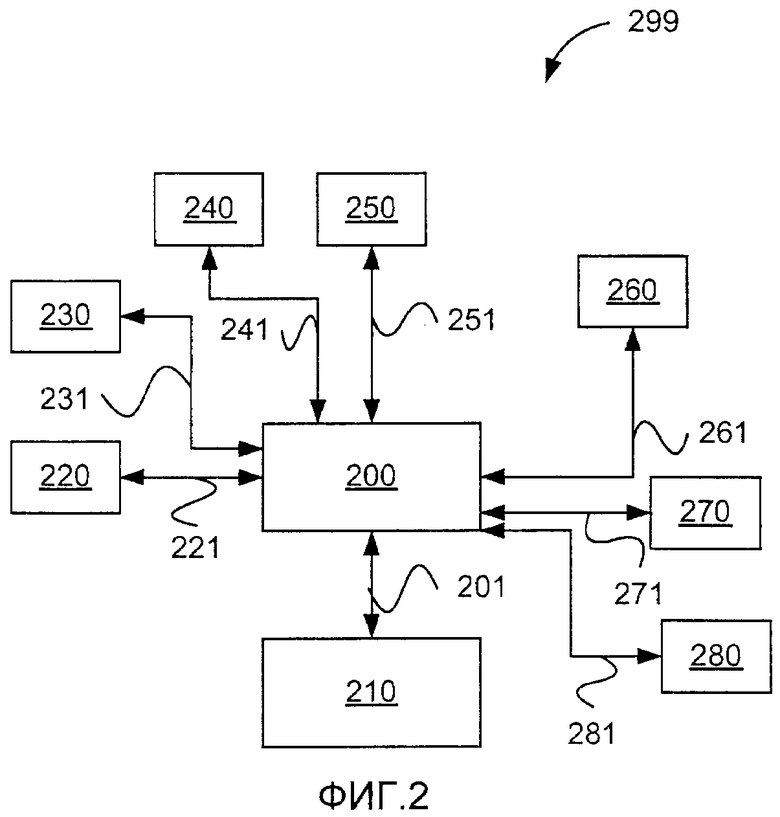
1. Способ калибровки датчика (220) ускорения для определения показателей ускорения моторного транспортного средства (100, 100), содержащий этап, на котором определяют характеристическую постоянную (а0) для упомянутого датчика ускорения,
отличающийся этапами, на которых
- устанавливают (s350), состоялась ли заправка транспортного средства, это выполняется путем сравнения определенных первого уровня топлива и второго уровня топлива или путем сравнения первого объема топлива и второго объема топлива; и
- определяют (s360) во время заправки транспортного средства (100, 110) упомянутую постоянную (а0), которая служит в качестве нулевого уровня для упомянутого датчика (220) ускорения.
2. Способ по п. 1, дополнительно содержащий этап, на котором
- обеспечивают показатель упомянутой заправки, когда количество поданного топлива превышает заданное значение (Thfuel).
3. Способ по п. 1 или 2, дополнительно содержащий этап, на котором
- определяют (s360) упомянутую постоянную (а0) во время заправки или по существу сразу после завершения заправки.
4. Способ по п. 1 или 2, дополнительно содержащий этап, на котором
- определяют (s360) упомянутую постоянную (а0) во время запуска двигателя после заправки или в заданное время, когда двигатель был запущен после заправки.
5. Способ по п. 1 или 2, содержащий этап, на котором
- обеспечивают упомянутую постоянную (a0), определенную для системы автоматического переключения передач.
6. Способ по п. 1 или 2, содержащий этап, на котором
- определяют (s360) упомянутую постоянную (а0) только при достижении, по меньшей мере, одного заданного состояния.
7. Способ по п. 1 или 2, в котором упомянутые показатели ускорения основаны на ускорении (av) транспортного средства в сочетании с наклоном (α) поверхности движения в продольном направлении транспортного средства и/или упомянутая характеристическая постоянная (а0) датчика ускорения относится к показателю ускорения датчика ускорения.
8. Устройство калибровки датчика (220) ускорения для определения показателей ускорения моторного транспортного средства (100, 110), причем устройство выполнено с возможностью определения характеристической постоянной (а0) для упомянутого датчика ускорения,
отличающееся
- средством (200; 210; 400) для установления, состоялась ли заправка транспортного средства, это выполняется путем сравнения определенных первого уровня топлива и второго уровня топлива или путем сравнения первого объема топлива и второго объема топлива; и
- средством (200; 210; 400) для определения упомянутой постоянной (а0) во время заправки транспортного средства (100, 110), причем постоянная (а0) служит в качестве нулевого уровня для упомянутого датчика (220) ускорения.
9. Устройство по п. 8, дополнительно содержащее
- средство (200; 210; 400) для обеспечения показателя упомянутой заправки, когда количество поданного топлива превышает заданное значение (Thfuel).
10. Устройство по п. 8 или 9, дополнительно содержащее
- средство (200; 210; 400) для определения упомянутой постоянной (а0) во время заправки или по существу сразу после завершения заправки.
11. Устройство по п. 8 или 9, дополнительно содержащее
- средство (200; 210; 400) для определения упомянутой постоянной (а0) во время запуска двигателя после заправки или в заданное время после того, как двигатель был запущен после заправки.
12. Устройство по п. 8 или 9, содержащее
- средство (200; 210; 400) для определения упомянутой постоянной (а0), определяемой для системы автоматического переключения передач.
13. Устройство по п. 8 или 9, содержащее
- средство (200; 210; 400) для определения упомянутой постоянной (а0) только при достижении, по меньшей мере, одного заданного состояния.
14. Устройство по п. 8 или 9, в котором упомянутые показатели ускорения основаны на ускорении (av) транспортного средства в сочетании с наклоном (α) поверхности движения в продольном направлении транспортного средства и/или упомянутая характеристическая постоянная (а0) датчика ускорения относится к показателю ускорения датчика ускорения.
15. Моторное транспортное средство (100; 110), оснащенное устройством по любому из пп. 8-14.
16. Моторное транспортное средство (100; 110) по п. 15, в котором транспортное средство является любым из: грузовым автомобилем, автобусом или легковым автомобилем.
| JPH 09318384 A, 12.12.1997 | |||
| JP 2008241550 A, 09.10.2008 | |||
| JP 2005315805 A, 10.11.2005 | |||
| JP 2009186010 A, 20.08.2009 | |||
| JPH 07301641 A, 14.11.1995 | |||
| JP 2009025012 A, 05.02.2009 | |||
| Способ калибровки датчика ускорения и датчик ускорения | 1990 |
|
SU1828547A3 |

