ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к технологиям оценки стиля вождения, перенятого водителем моторного транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Известны несколько технологий оценки стиля вождения водителей моторных транспортных средств, которые должны реализовываться с опорой на оценку потребления топлива, безопасность поведения водителя, или для того чтобы вообще оценивать его способности вождения. Согласно некоторым технологиям, оценка также производится, для того чтобы переходить к автоматическому управлению некоторыми аспектами вождения моторного транспортного средства.
Заявка на патент EP-A-1780090 описывает способ для определения стиля вождения водителя моторного транспортного средства, который предусматривает контроль различных характеристик, среди которых: количество действий звукового сигнала, изменение скорости, изменение положение педалей, угловая скорость, определенная движениями рулевого колеса. Оценка в таком случае основана на расчете разниц между этими контролируемыми характеристиками и предопределенными пороговыми значениями.
Заявка на патент EP-A-0777071 описывает способ управления автоматической трансмиссией транспортного средства в объеме функции стиля вождения водителя, среди прочего, на основании следующей информации: раскрыва топливного клапана, скорости транспортного средства, частоты вращения двигателя.
Заявка на патент EP-A-1498297 описывает способ оценки потребления топлива, который служит для контроля многочисленных характеристик, среди которых: сигнал частоты вращения ведущего колеса, сигнал частоты вращения вала двигателя, сигнал температуры охлаждения, сигнал температуры топлива.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Заявитель заметил, что традиционные технологии для оценки стиля вождения слишком сложны и обременительны с вычислительной точки зрения, и перенимают критерии классификации стиля водителя, основанные на предопределенных стандартах, которые часто выглядят нереальными.
Цель настоящего изобретения состоит в том, чтобы предложить технологии оценки стиля вождения моторного транспортного средства, сочетающие не слишком большую сложность, тем не менее, приводя к определению стиля вождения, результат которого достаточно реален и достоверен.
Цель настоящего изобретения достигается системой оценки стиля вождения, которая определена согласно пункту 1 формулы изобретения. Предпочтительные варианты осуществления определены в зависимых пунктах со 2 по 11 формулы изобретения. Предметом изобретения также является способ оценки стиля вождения, который определен в пункте 12 формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные характеристики и преимущества изобретения, вытекающие из последующего описания предпочтительного варианта осуществления и его разновидностей, приведены примерным образом со ссылкой на прилагаемые чертежи, на которых:
фиг. 1 схематически показывает пример системы оценки стиля вождения водителя моторного транспортного средства;
фиг. 2 показывает блок-схему последовательности операций способа, относящуюся к способу оценки стиля вождения моторного транспортного средства, который может быть реализован способом оценки, описанным со ссылкой на фиг.1;
фиг. 3 показывает кривую, относящуюся к измеренному сигналу скорости, и кривую, относящуюся к сигналу, полученному посредством фильтрации нижних частот упомянутого измеренного сигнала скорости;
фиг. 4 показывает кривую, относящуюся к оцененной энергии, использованной моторным транспортным средством, и кривую, относящуюся к эталонной энергии;
фиг. 5 показывает принципиальную схему у схемы предварительной обработки сигналов скорости и ускорения согласно конкретному варианту осуществления;
фиг. 6 показывает диаграмму состояний, относящуюся к примеру способа автоматического выявления моментов остановки и начала движения моторного транспортного средства;
фиг. 7 показывает блок-схему последовательности операций способа, относящуюся к еще одному способу оценки стиля вождения моторного транспортного средства, который может быть реализован посредством системы оценки, описанной со ссылкой на фиг.1;
фиг. 8a, 8b и 8c показывают кривые, относящиеся к различным кинематическим характеристикам, ассоциативно связанным с движением транспортного средства;
фиг. 8d показывает отсчеты значений ускорения и рывка, относящиеся к моторному транспортному средству, представленные в декартовой системе координат;
фиг. 9 показывает пример визуализации отображения на смартфоне результатов вышеупомянутых способов оценки.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
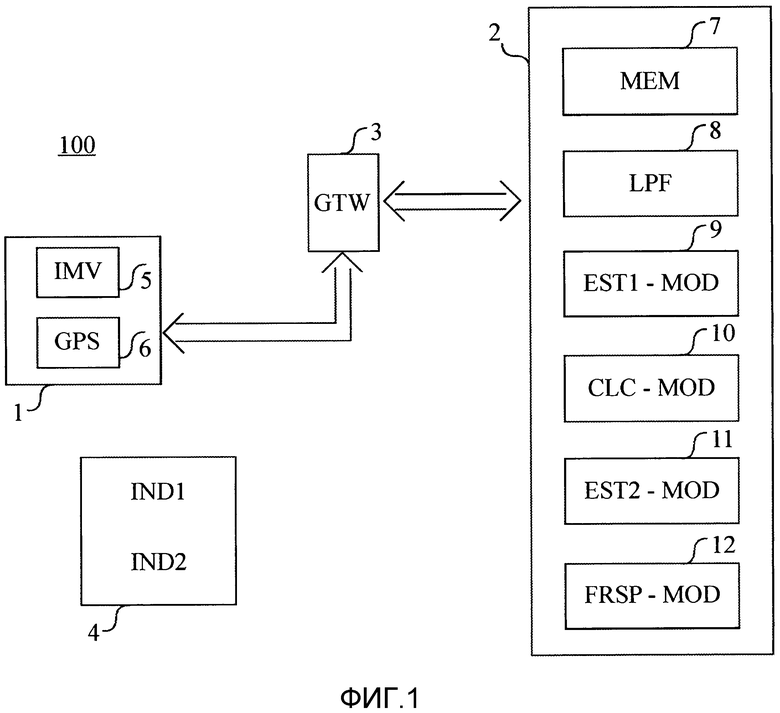
Фиг. 1 показывает пример системы 100 оценки стиля вождения водителя моторного транспортного средства.
В частности, система 100 оценки содержит устройство 1 измерения и компьютерную систему 2, способную поддерживать связь, например, через шлюзовое устройство 3 (GTW). Например, система 100 оценки также оснащена устройством 4 предоставления отчета или воспроизведения по результатам выполненной оценки.
Устройство 1 измерения предпочтительно установлено на моторном транспортном средстве и дает возможность выдавать электрические сигналы, в частности, цифровые сигналы, представляющие кинематические характеристики, ассоциативно связанные с движением самого транспортного средства. Цифровые сигналы, испускаемые устройством 1 измерения, могут быть сигналом скорости моторного транспортного средства, а также, например, сигналом ускорения самого моторного транспортного средства. В качестве альтернативы, устройство 1 измерения может выдавать электрический сигнал в аналоговой форме, который может преобразовываться в цифровые сигналы, чтобы, например, давать возможность численной обработки, выполняемой посредством программного обеспечения. Цифровое преобразование, например, также может выполняться шлюзовым устройством 3.
Согласно специфичному варианту осуществления, устройство 1 измерения может содержать измерительный преобразователь скорости и измерительный преобразователь ускорения моторного транспортного средства. Для этой цели устройство сбора данных сигналов 1, например, оснащено инерциальной измерительной системой 5 (IMU), известной самой по себе (известной в области техники с наименованием «инерциальная платформа»), которая содержит компьютер и датчики движения, способные выдавать сигнал скорости и сигнал ускорения моторного транспортного средства (по направлению, смыслу и амплитуде), и, по выбору, даже другие сигналы, описывающие движение моторного транспортного средства.
Более того, устройство 1 измерения преимущественно также может быть оснащено устройством 6 определения местоположения (GPS) в качестве приемника, действующего в спутниковой системе определения местоположения, например, аналогичной системе GPS (глобальной системе определения местоположения). Приемник 6 GPS способен выдавать, в дополнение к положению моторного транспортного средства, также и соответствующий сигнал скорости.
Со ссылкой на вычислительное устройство 2, согласно варианту осуществления, это блок формирования данных или компьютер (оснащенный памятью, блоками обработки и интерфейсами с внешним миром), способный принимать сигналы, приходящие из устройства 1 измерения, и выполнять операции вычисления и формирования, для того чтобы оценивать стиль вождения моторного транспортного средства, принятый конкретным водителем.
В частности, блок 2 обработки данных также содержит память измеренных данных, 7 (MEM), и множество модулей, предпочтительно типа программного обеспечения, и модуль 8 фильтрации нижних частот (LPF), первый модуль 9 оценки (EST1-MOD) и модуль 10 расчета (CLC-MOD). Как будет пояснено дальше, первый модуль 9 оценки способен оценивать стиль вождения на основании энергии, используемой или потребляемой моторным транспортным средством. Согласно еще одному варианту осуществления, блок 1 обработки данных также оснащен вторым модулем 11 оценки (EST2-MOD), сконфигурированным таким образом, чтобы выполнять оценку стиля вождения на основании безопасности для пассажиров моторного транспортного средства.
Блок 2 обработки данных может быть установлен на борту моторного транспортного средства или может быть удаленным от такового и, например, находится в пункте наблюдения. Когда установлен на моторном транспортном средстве, блок 2 обработки данных может быть соединен с устройством 1 измерения через кабели или через шлюзовое устройство 3, которое обеспечивает радиочастотное соединение ближнего действия (например, как соединение, основанное на протоколе Bluetooth) с блоком 2 обработки данных и с инерционной измерительной системой 5 и приемником 6 GPS.
Преимущественно, блок 2 обработки данных может быть оснащен сотовым приемо-передающим устройством, способным поддерживать связь, посредством мобильной телефонной системы, с пунктом наблюдения. В качестве альтернативы, если блок 2 обработки данных размещен в пункте наблюдения, такое сотовое приемо-передающее устройство дает возможность поддерживать связь с подходящим отдаленным сотовым приемопередающим устройством, размещенным на борту моторного транспортного средства. Преимущественно, устройство 2 обработки может быть смартфоном.
Устройство 4 предоставления отчета предпочтительно может находиться на борту моторного транспортного средства и в этом случае оно преимущественно совмещается с блоком 2 обработки. Устройство 4 предоставления отчета также может находиться в пункте наблюдения или оно может находиться на моторном транспортном средстве и быть устройством, отдельным от устройства 2 обработки. В любом случае, устройство 4 предоставления отчета предпочтительно содержит один дисплей, способный визуализировать информацию, дающую водителю возможность узнавать результат оценки своего собственного стиля вождения. Фиг. 2 показывает блок-схему 200 последовательности операций способа, относящуюся к способу оценки стиля вождения моторного транспортного средства, который, например, может быть реализован посредством системы оценки, описанной со ссылкой на фиг.1.
После символической начальной фазы способ предусматривает фазу 201 измерения, в которой инерциальная измерительная система 5 выдает цифровой электрический сигнал, представляющий развитие кинематических характеристик, ассоциативно связанных с движением моторного транспортного средства, например, подобных амплитуде скорости v(t), допускаемой моторным транспортным средством вдоль пути измерения. Сигнал v(t) скорости, в качестве альтернативы, также может выдаваться приемником 6 GPS. Возможный критерий определения и автоматический расчет длительности пути измерения, рассматриваемого для оценки, будут описаны в дальнейшем.
Цифровой электрический сигнал v(t) скорости делается имеющимся в распоряжении у блока 2 обработки данных посредством шлюзового устройства 3. Фиг. 3 показывает кривую v(t), соответствующую специфичному развитию скорости, измеренной экспериментально. Кривая v(t) по фиг. 3 имеет отрезки, соответствующие резким изменениям скорости. Цифровые значения, соответствующие сигналу v(t) скорости, сохраняются в памяти 7.
В фазе 202 фильтрации, блок 2 обработки обрабатывает цифровые значения, ассоциативно связанные с сигналом v(t) скорости, выполняя цифровую фильтрацию типа нижних частот и, таким образом, выдавая фильтрованный цифровой сигнал.
Фильтрованный цифровой сигнал соответствует фильтрованной скорости vF(t), показанной в качестве примера на фиг. 3 и указывающей эталонное развитие для скорости. Кривая фильтрованной скорости vF(t) на фиг. 3 не имеет резких изменений взамен присутствующих на кривой v(t). Предполагается, что фаза фильтрации устраняет из сигнала скорости такие резкие изменения скорости, вызванные неблагоразумным способом вождения, что поэтому дает возможность получать достоверный эталонный сигнал. Например, эти резкие изменения могли бы быть обусловлены тем обстоятельством, что водитель не сразу воспринял, что светофор является желтым, и резко тормозит.
Со ссылкой на фильтрацию нижних частот, она может быть реализована модулем 8 фильтрации по фиг. 1 посредством известных технологий цифровой фильтрации, например, применяющих (FIR, с конечной импульсной характеристикой) КИХ-фильтр или, предпочтительно (IIR, с бесконечной импульсной характеристикой) БИХ-фильтр, например, типа Баттерворта и надлежащего порядка. В качестве альтернативы, также можно осуществлять фильтрацию над сигналом скорости в аналоговой форме, если имеется в распоряжении, посредством аналогового фильтра нижних частот.
Со ссылкой на конкретный случай оценки стиля вождения водителей автобусов, было экспериментально замечено, что предпочтительные значения для частоты fc среза, ассоциативно связанной с фильтрацией нижних частот, например, заключены между 0,04 Гц и 0,06 Гц в случае БИХ- фильтра типа Баттерворта второго порядка. Особенно предпочтительное значение частоты fc среза, равное 0,05 Гц, было получено экспериментально посредством анализа поведения нескольких водителей автобусов, для одного и того же расстояния и с учетом фильтра Баттерворта второго порядка. Частное значение 0,05 Гц было получено посредством наблюдения спектра частот всего испытательного парка и посредством выбора значения, достигаемого самым эффективным водителем.
На основе сравнения между сигналом v(t) скорости и фильтрованным сигналом vF(t) можно выдавать показание стиля вождения моторного транспортного средства. В частности, это сравнение и связанное показание стиля вождения основаны на расчете энергии, использованной моторным транспортным средством на пути измерения.
Подробнее, в первой фазе 203 расчета производится расчет оценки энергии E1(t), использованной моторным транспортным средством на пути измерения, посредством использования сигнала v(t) скорости (предпочтительно, в цифровой форме) и математической модели моторного транспортного средства. Расчет энергии E1 может производиться модулем 10 расчета по фиг. 1. Со ссылкой на математическую модель для использования, давайте предположим, что продольная выдаваемая двигателем сила F от двигателя моторного транспортного средства, например, могла бы быть выражена в качестве:
 ,
,
в котором:
M - масса моторного транспортного средства;
a(t) - продольное ускорение моторного транспортного средства;
ρ - плотность воздуха, которая зависит от условий давления, высоты над уровнем моря и температуры;
S - передняя поверхность моторного транспортного средства;
Cx - коэффициент лобового сопротивления, описывающий форму моторного транспортного средства;
член M a(t) представляет силу инерции моторного транспортного средства;
член 1 /2ρSCxv(t) представляет силу лобового сопротивления.
В формуле (1) члены, относящиеся к силе торможения и к силе, ассоциативно связанной с уклоном области, покрываемой путем моторного транспортного средства, не указаны, так как они не рассматривались в выполняемых испытаниях. Тем не менее член, относящийся к силе торможения, мог бы преимущественно рассматриваться в случае моторного транспортного средства с электрическим двигателем, для которого энергия, ассоциативно связанная с таким членом, является по меньшей мере частично восстанавливаемой.
Мощность Pengine, выдаваемая двигателем, задана в качестве:

Первый член формулы (2) является мощностью инерции, тогда как второй член является аэродинамической мощностью. Следуя испытаниям, выполненным на расстояниях, покрываемых автобусом, было экспериментально обнаружено, что мощность инерции является приблизительно в 10 раз большей, чем аэродинамическая, когда была принята довольно низкая средняя скорость.
Оцененная энергия E1(t) задана интегралом мощности по времени на диапазоне 0-t1 измерения:

В первой фазе 203 расчета модуль 10 расчета на основании формул (2) и (3) осуществляет численную обработку имеющихся в распоряжении цифровых данных и оценивает энергию E1, использованную двигателем моторного транспортного средства. В частности, с целью этого расчета, в дополнение к сигналу v(t) скорости, полученному измерением, также используется сигнал ускорения, представляющий ускорение a(t), который может выдаваться инерциальной измерительной системой 5 или может быть получен операцией взятия производной сигнала v(t) скорости, в свою очередь измеренного инерциальной измерительной системой 5 или выдаваемого приемником 6 GPS.
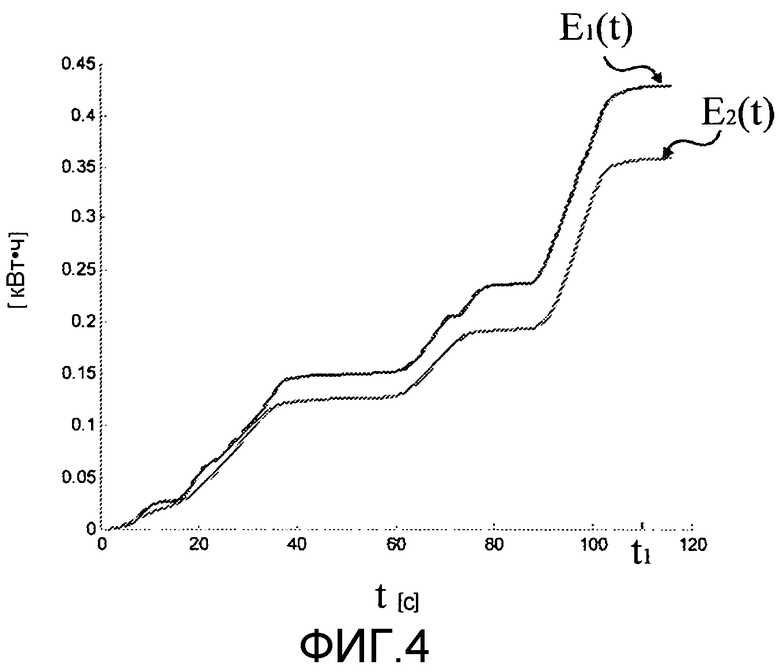
Фиг. 4 показывает пример линии изменения во времени оцененной энергии E2(t), ассоциативно связанной с линией изменения измеренной скорости v(t). Согласно этому примеру, оцененной энергии E1(t) соответствует потребление 0,428 кВт·ч.
На втором этапе 204 расчета, модуль 10 расчета производит оценку эталонной энергии E2(t), соответствующей энергии, которую двигатель моторного транспортного средства использовал бы в случае, в котором вождение моторного транспортного средства происходило бы согласно образцу эталона, ассоциативно связанного с фильтрованным сигналом vF(t) скорости. Для этого расчета модуль 10 расчета, например, использует следующие формулы:
В таких формулах (4) и (5), в дополнение к определенным до сих пор параметрам, появляется фильтрованный сигнал vF(t) скорости и его производная aF(t). Фиг. 4 показывает пример линии изменения во времени эталонной энергии E2(t), ассоциативно связанной с эталонной линией изменения vF(t) скорости, полученной фильтрацией измеренного сигнала v(t) скорости. Согласно этому примеру, эталонной энергии E2(t) соответствует потребление 0,358 кВт·ч.
На этапе 205 сравнения, первый модуль 9 оценки сравнивает значение энергии, ассоциативно связанной с измеренным ходом, со значением эталонной энергии и, в рамках функции их разности, дает показание, указывающее на стиль вождения, принятый водителем. Это показание может выдаваться в разных формах. Согласно примеру, модуль оценки рассчитывает и делает имеющимся в распоряжении первое показание IND1, представляющее в процентах разницу между оцененной энергией E1, потребленной в целом на пути измерения, и эталонной энергией E2 для того же самого пути:
IND1=(E1(t1)-E2(t1))/E2(t1) 100
Блок 2 обработки может делать имеющимся в распоряжении это первое показание IND1 у устройства 4 предоставления отчета, для того чтобы она была также видимой для водителя. Способ 200 заканчивается символическим этапом Конец (END).
Возвращаясь к этапу 201 измерения, должно быть отмечено, что, с целью точности оценки расходуемой энергии, полезно предусмотреть устройство 1 измерения, способное выдавать сигнал v(t) скорости, имеющий богатое информационное содержание, которое является имеющим диапазон, по меньшей мере равный характеристической динамике моторного транспортного средства. Можно, чтобы инерциальная измерительная система 5 была оснащена только измерителем ускорения для измерения продольного ускорения, тогда как для измерения скорости был имеющимся в распоряжении только приемник 6 GPS.
Кроме того, со ссылкой на испытания, выполненные над автобусами для перевозки пассажиров, заявитель экспериментально обнаружил, что сигнал, представляющий скорость, выдаваемую приемником 6, имеет информационное содержание хорошего качества на низких частотах и умеренного качества на высоких частотах, то есть спектр сигнала скорости оказывается богатым информационным содержанием вплоть до приблизительно 0,05 Гц. Взамен сигнал ускорения, выдаваемый измерителем ускорения инерциальной измерительной системы 5, оказывается точным на высоких частотах, будучи более низкого качества на низких частотах, то есть его спектр богат информационным содержанием выше приблизительно 0,05 Гц. Должно быть отмечено, что, например, измеритель ускорения инерциальной системы 5 типично реализован технологией MEMS (микроэлектромеханических систем).
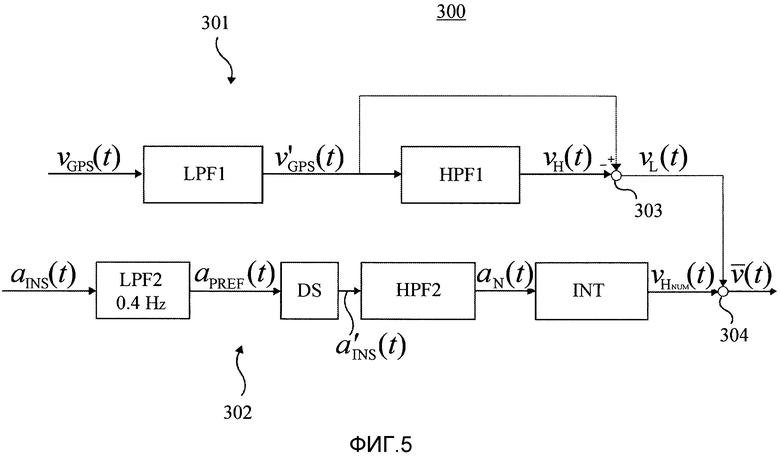
В этом случае, способ частотного разделения применим, для того чтобы строить сигнал скорости, который учитывает информационное содержание, выдаваемое как приемником GPS, так и инерциальным измерителем ускорения. Принципиальная схема схемы 300 предварительной обработки показана на фиг. 5 посредством функциональных блоков. Так или иначе, этот способ может выполняться программным обеспечением, например, в блоке 2 обработки и посредством необязательного модуля 12 частотного разделения (FRSP-MOD).
Схема 300 предварительной обработки содержит первую ветвь 301 обработки сигнала vGPS(t) скорости, выдаваемого приемником 6 GPS, и вторую ветвь 302 обработки сигнала aINS(t) ускорения, выдаваемого инерциальным измерителем 5 ускорения, первый узел 303 и второй узел 304.
Первая ветвь 301 оснащена входом для сигнала vGPS(t) скорости, подаваемого приемником 5 GPS, присоединенным к первому фильтру LPF1 нижних частот, способным к устранению высокочастотных шумовых составляющих. Первый фильтр LPF1 нижних частот, например, является (с бесконечной импульсной характеристикой, IIR) БИХ-фильтром типа Баттерворта четвертого порядка, в частности, имеющим частоту среза около 0,4 Гц.
Сигнал v'GPS(t), выходящий из первого фильтра LPF1 нижних частот, подается на первый фильтр HPF1 верхних частот, который удаляет его высокие частоты, возвращая высокочастотный сигнал vH(t). Высокочастотный сигнал vH(t) подается на вход вычитания первого узла 303, на который также подается такой же сигнал v'GPS(t), выходящий из первого фильтра LPF1 нижних частот. На выходе первого узла, присутствует низкочастотный сигнал vL(t) скорости, который подается на клемму сумматора второго узла 304.
Вторая ветвь 302 оснащена входной клеммой для сигнала aINS(t) ускорения, подаваемого инерциальным измерителем 5 ускорения, и соединенной с вторым фильтром LPF2 нижних частот (например, таким же, как первый фильтр LPF1) для удаления высокочастотного шума, который возвращает предварительно фильтрованный сигнал aPREF(t) ускорения. Предварительно фильтрованный сигнал aPREF(t) ускорения затем восстанавливается в аналоговую форму по выборке блоком DS восстановления в аналоговую форму по выборке, для того чтобы он имел в своей цифровой форме частоту выборки, идентичную сигналу vGPS(t) скорости.
Подвергнутый восстановлению аналоговой формы по выборке сигнал a'INS(t) ускорения, выходящий из блока DS восстановления в аналоговую форму по выборке, затем подается на второй фильтр HPF2 верхних частот, который возвращает высокочастотный сигнал aH(t) ускорения. Такой высокочастотный сигнал aH(t) ускорения затем интегрируется интегратором INT, который затем подает высокочастотный сигнал vHNUM(t) скорости, который прибавляется из второго узла 304 к низкочастотному сигналу vL(t) скорости, таким образом, формируя сигнал -v-(t) скорости, полученный посредством технологии частотного разделения, описанной выше, который будет использоваться способом 200 оценки по фиг. 2.
Должно быть отмечено, что низкочастотный сигнал vL(t) скорости, приложенный к второму узлу 304, также мог бы быть получен через другой фильтр нижних частот сигнала v'GPS(t), но принципиальная схема, показанная на фиг. 5, дает возможность использовать второй фильтр HPF2 верхних частот, идентичный первому фильтру HPF1 верхних частот, а значит этот выбор уменьшает сложность численного алгоритма, который реализует схему по фиг. 5.
Поэтому, преимущественно, первый и второй фильтры HPF1 и HPF2 верхних частот имеют одинаковый порядок и одинаковую частоту среза, например, которая может быть установлена и выбрана на основе экспериментальных испытаний, или она может определяться посредством выбора значения частоты, которое минимизирует разность между первым расстоянием d1, покрываемым моторным транспортным средством и определенным на основе координат широты и долготы, заданных приемником 6 GPS, и вторым расстоянием d2, полученным в качестве интеграла скорости vGPS(t). Возможное значение для частоты среза фильтров HPF1 и HPF2 верхних частот заключено между 0,06 и 0,08 Гц, предпочтительно, оно является 0,07 Гц. Первый и второй фильтр HPF1 и HPF2 верхних частот реализованы посредством фильтра Баттерворта второго порядка.
Что касается моментов времени представления водителю или любому другому наблюдателю оценки стиля вождения, могут быть переняты различные критерии. Например, можно выдавать результат оценки в конце предопределенного расстояния, покрытого моторным транспортным средством, или периодически, то есть по истечении предопределенного периода. Согласно предпочтительному варианту, результат оценки выдается при каждой остановке моторного транспортного средства.
Считается, что на основе экспериментальных оценок, предпочтение выполнения расчетов для оценки вождения посредством принятия во внимание сигнала скорости, полученного между началом движения и остановкой, дает возможность опираться на среднюю скорость моторного транспортного средства, которая точна, таким образом, делая оценку особенно достоверной.
Более того, предпочтение выдавать результат водителю после остановки дает тому же водителю возможность быстрого видения первого показания IND1, представляющего его собственный стиль вождения.
Пример критерия автоматического определения начала движения и остановки моторного транспортного средства, а значит, определения начального времени получения измеренных результатов скорости и измерения и конечного времени, в котором результат оценки выдается водителю, будет описан в последующем.
Автоматическое определение остановки, произведенное на основе сигнала скорости, выдаваемого приемником 6 GPS, может иметь затруднение вследствие того обстоятельства, что информация, выдаваемая таким приемником, имеет качество, сильно зависимое от специфичного спутникового покрытия.
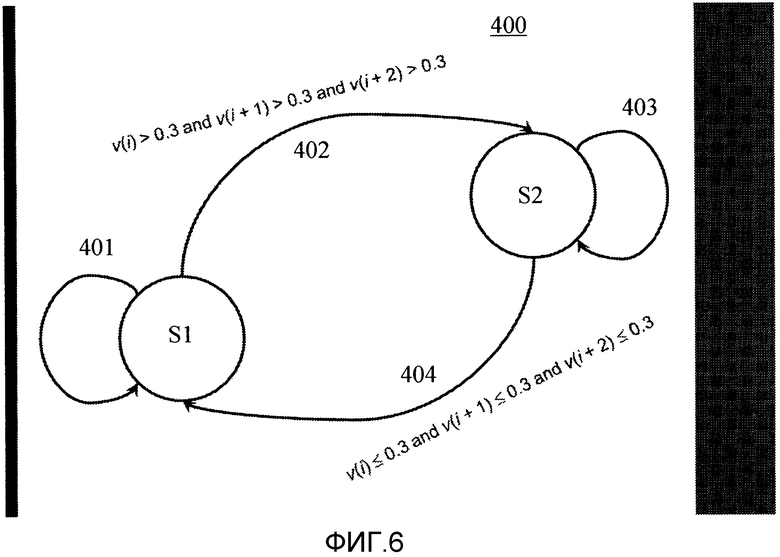
Сделана ссылка на диаграмму 400 состояний по фиг. 6, которая определяет состояние S1 ожидания начала движения и состояние S2 ожидания остановки. Такая диаграмма описывает алгоритм, который может быть реализован посредством программного обеспечения, в модуле 10 расчета блока 2 обработки, или посредством конечного автомата, реализованного логикой. Согласно этому алгоритму, он остается в состоянии (цикле 401) ожидания начала движения до тех пор, пока не наблюдается, что в течение трех следующих один за другим моментов времени измерения, скорость моторного транспортного средства является большей, чем пороговое значение, например, равное 0,3 м/с. Подробнее, он имеет переход 402 в состояние S2 ожидания остановки, когда:
значение скорости, измеренное в i-й момент времени, v(i), является большим чем 0,3 м/с; и
значение скорости, измеренное в (i+1)-ый момент времени, v(i+1), является большим чем 0,3 м/с; и
значение скорости, измеренное в (i+2)-ой момент времени, v(i+2), является большим чем 0,3 м/с; и
i-ый момент времени взят в качестве момента времени начала движения. Затем он остается в состоянии S2 (цикле 403) ожидания остановки до тех пор, пока не наблюдается, что скорость, измеренная в трех следующих один за другим моментах времени, является меньшей или равной пороговому значению 0,3 м/с. Затем он возвращается (переход 404) к времени S1 ожидания начала движения, когда возникают следующие условия:
значение скорости, измеренное в i-й момент времени, v(i2), является меньшим или равным 0,3 м/с; и
значение скорости, измеренное в (i+1)-ый момент времени, v(i+1), является меньшим или равным 0,3 м/с; и
значение скорости, измеренное в (i+2)-ой момент времени, v(i+2), является меньшим или равным 0,3 м/с.
i-ый момент времени взят в качестве момента времени остановки.
После перехода 404, полученное значение оценки выдается в устройство 4 предоставления отчета по фиг. 1.
В последующем описан пример дополнительного способа оценки стиля вождения, который может использоваться в дополнение к способу 200 оценки, проиллюстрированному со ссылкой на фиг. 2, или такой дополнительный способ может быть независимым от способа 200 оценки. Этот дополнительный способ оценки стиля вождения, например, может использоваться, для того чтобы оценивать, в какой степени поведение водителя является более или менее безопасным, главным образом, в отношении перевозимых пассажиров.
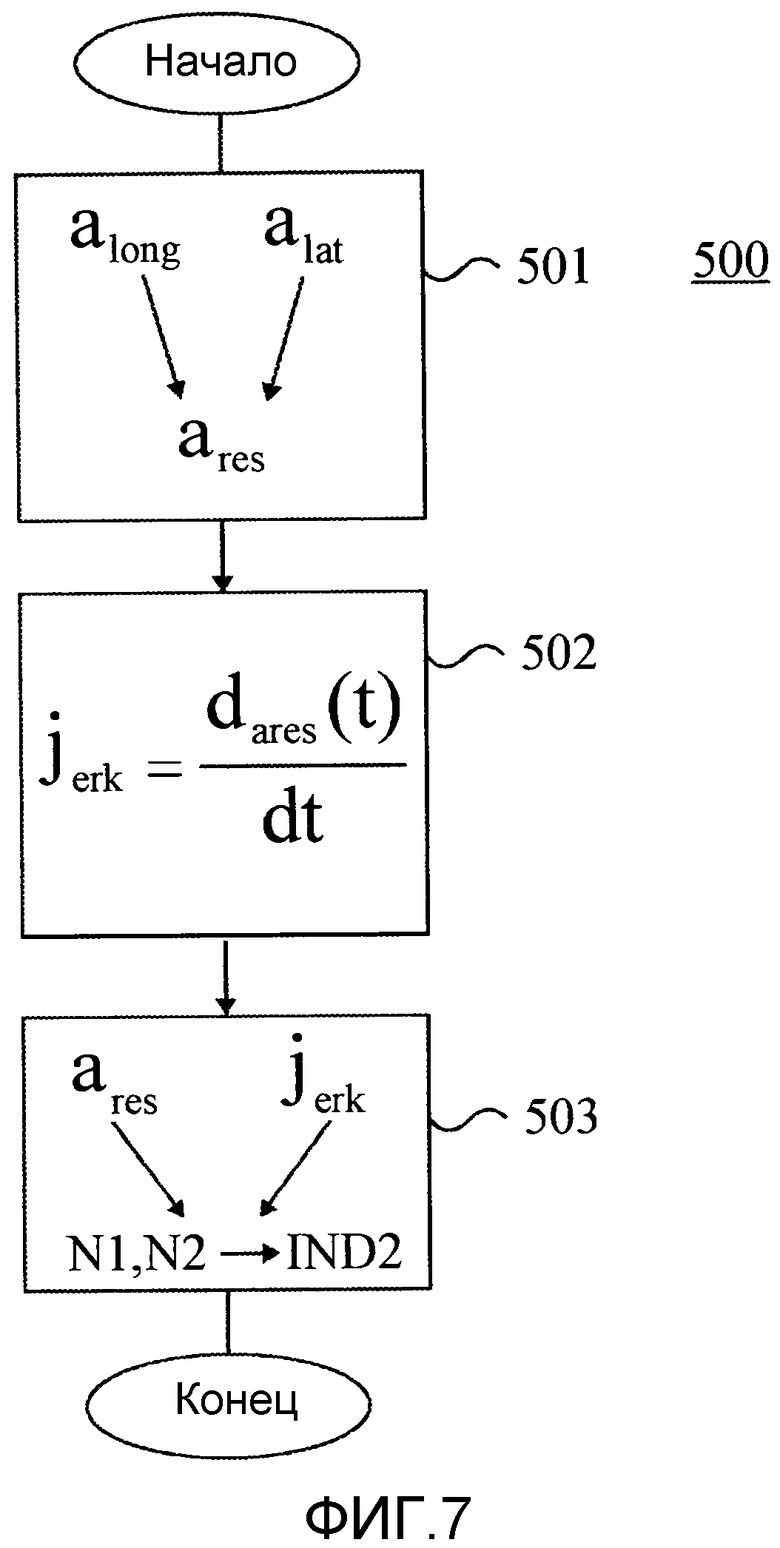
Далее, будет сделана ссылка на фиг. 7, которая показывает блок-схему 500 последовательности операций способа упомянутого дополнительного способа оценки стиля вождения. В первой фазе 501, получается сигнал ares(t) ускорения моторного транспортного средства, представляющий амплитуду результирующего ускорения, соответствующего векторной сумме продольного ускорения along(t) и поперечного ускорения alat(t). В частности, сигнал ares(t) результирующего ускорения может быть получен, например, реализацией, в модуле 10 расчета, программно реализованного алгоритма, соответствующего следующей формуле:

Касательно определения сигнала along(t) продольного ускорения, он может быть получен непосредственно из инерциальной измерительной системы 5, если имеется в распоряжении, или он может определяться взятием производной сигнала v(t) скорости моторного транспортного средства. Сигнал, представляющий поперечное ускорение alat(t), может выдаваться инерциальной измерительной системой 5, или он может получаться по следующей формуле, которая, например, может быть реализована посредством программного обеспечения модуля 10 расчета:
 ,
,
в которой ω(t) - угловая скорость поворота или рыскания моторного транспортного средства, выдаваемая надлежащим датчиком инерциальной измерительной системы 5, а v(t) - до сих пор определяемая скорость моторного транспортного средства. Сигнал v(t) скорости, например, может быть сигналом, выдаваемым приемником 6 GPS или датчиком скорости инерциальной измерительной 5, либо он может получаться интегрированием сигнала along(t) продольного ускорения, выдаваемого инерциальной измерительной системой 5. В качестве альтернативы, сигнал скорости является сигналом, который получен посредством технологии частотного разделения, описанной со ссылкой на фиг. 5.
Во второй фазе 502, на основе результирующего ускорения ares(t), (например, посредством модуля 10 расчета), рассчитывается характеристический «рывок», также известный как «толчок», то есть, производная по времени результирующего ускорения ares(t), по следующей формуле:

В частности, модуль 10 расчета может реализовывать формулу (8) числовым образом. В третьей фазе 503, производится еще одна оценка стиля вождения, например, посредством второго модуля 11 оценки, которая учитывает амплитуду как результирующего ускорения ares(t), так и jerk(t), выраженного в соотношении 8. Должно быть отмечено, что эта оценка указывает в качестве неэффективных те режимы движения, в которых высок модуль результирующего ускорения ares(t), и/или высок jerk(t).
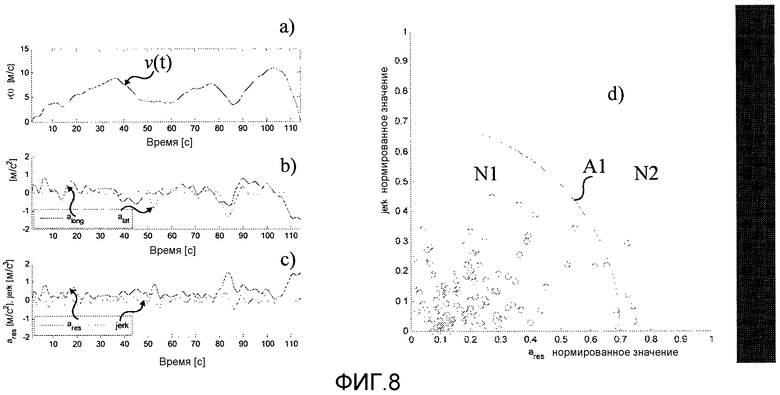
Фиг. 8 обращается к экспериментально полученным данным. В частности, фиг. 8a показывает кривую v(t) скорости.
Фиг. 8b показывает кривую продольного ускорения along(t) и кривую поперечного ускорения alat(t), а фиг. 8c показывает кривую результирующего ускорения ares(t) и кривую jerk(t). На фиг. 8d, показаны отсчеты, измеренные с одной второй периода, соответствующие парам нормированных значений результирующих ускорений и рывка. Цифровые данные, ссылающиеся на такие отсчеты, сохраняются в памяти 7 отсчетов. Нормирование было сделано, согласно этому примеру, рассматривая отсчет, самый близкий к началу координат, из полного парка экспериментальных испытаний, в качестве нуля по системе декартовых координат, и того, который наиболее удален от начала координат полного парка экспериментальных испытаний, равным единице.
Более того, на схеме по фиг. 8d, показана дуга A1, которая ограничивает круговой сектор, включающий в себя отсчеты, соответствующие стилю вождения, рассматриваемому безопасным. Фактически, отсчеты внутри дуги A1, имеют в качестве координат, результирующее ускорение ares(t) и jerk(t), для которых евклидово расстояние от начала координат соответствует тому, которое является меньшим, чем нормированное пороговое значение, в примере - 0,7 (то есть, меньшим, чем радиус дуги A1). Отсчеты, имеющие евклидово расстояние от начала координат, большее, чем пороговое значение 0,7, считаются соответствующими небезопасному стилю вождения.
К тому же, можно делить область схемы по фиг. 8d на множество колец, ассоциативно связанных с разными уровнями безопасности. Должно быть отмечено, что пороговое значение 0,7 в эмпирическом значении, было приведено только в качестве примера, но правдоподобие которого было оценено экспериментально.
Второй модуль 11 оценки может быть сконфигурирован, для того чтобы производить расчеты, которые дают возможность сравнивать эвклидово расстояние каждой точки плоскости, определенной схемой по фиг. 8 (имеющей специфичные значения координат ares(t) и jerk(t)), с вышеупомянутым пороговым значением. Посредством определения с суммарным количеством N отсчетов, можно рассчитывать первое процентное отношение N1 и второе процентное отношение N2. Первое процентное отношение N1 задано процентным отношением отсчетов относительно суммарного количества N, имеющих расстояние от начала координат, меньшее, чем пороговое значение 0,7. Второе процентное отношение N2 задано процентным отношением отсчетов относительно суммарного количества N, имеющих расстояние от начала координат, большее, чем пороговое значение 0,7. Эти процентные отношения дают второе показание IND2 оценки стиля вождения.
В качестве альтернативы, оценка стиля вождения, к тому же, например, может делаться не на основании расчета расстояния каждого отсчета от центра системы координат ares(t) и jerk(t), но расчета центра тяжести набора отсчетов и сравнения расстояния этого центра тяжести с пороговым значением, указанным раньше. Также можно рассчитывать положение центра тяжести взвешенным образом, который является ассоциативным связыванием с каждым отсчетом разного веса в зависимости от того обстоятельства, что таковой является большим нормированного значения результирующего ускорения или нормированного значения у рывка.
Что касается продолжительности пути измерения и времени, необходимого для представления оценки водителю, это также может применяться для этого дополнительного способа оценки с такими же соображениями, сделанными со ссылкой на способ 200 по фиг. 2.
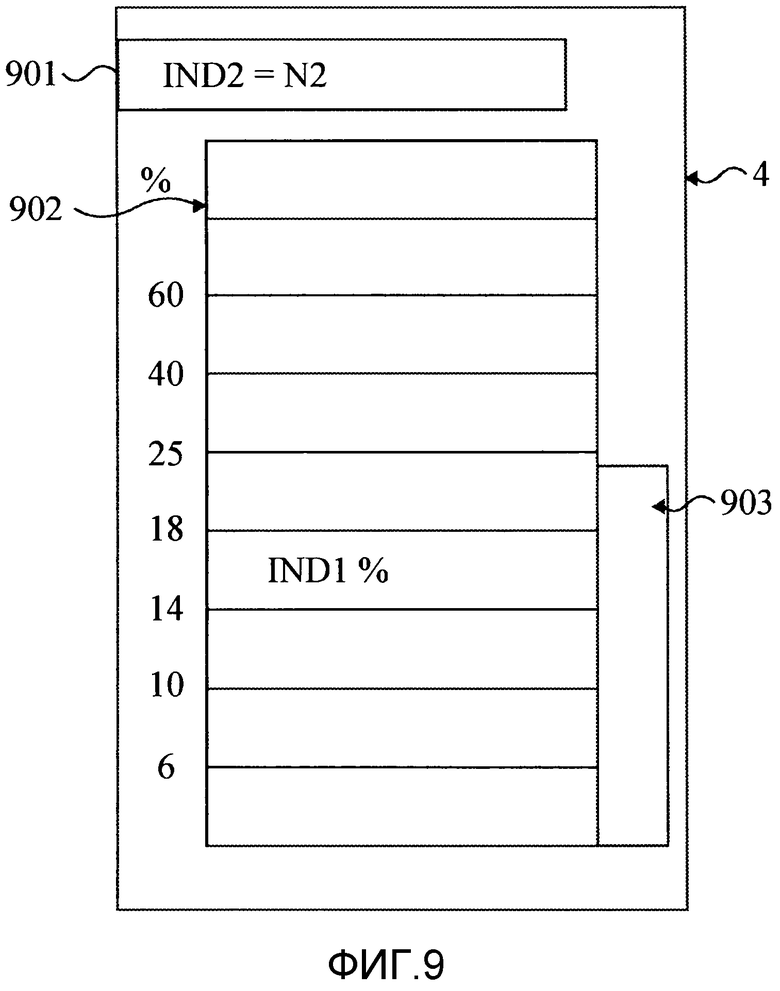
Фиг. 9 показывает пример возможного варианта визуализации на дисплее устройства 4 предоставления отчета (в частности, таком же дисплее смартфона, с которым выполнен блок 2 обработки) первого показания IND1, указывающего ссылкой на расходуемую энергию, и второго показания IND2, указывающего ссылкой на безопасность вождения. Согласно этому примеру, горизонтальная линейка 901 имеет приблизительную длину в процентах небезопасного поведения, то есть, она имеет приблизительную длину процентного отношения N2, описанного выше, которая в таком случае, создает, согласно этому примеру, второй показатель IND2.
На шкале 902, также показано первое показание 100, IND1 = (E1- E2)/E2, представляющее часть энергии E1, расходуемой двигателем, которая превышает эталонную энергию E2. Первое показание IND1 также является представляющим потребление топлива, превышающее то, которое наблюдалось бы, если бы вождение осуществлялось с более эффективными режимами.
Преимущественно, может быть предусмотрена еще одна линейка 903, например, вертикальная, имеющая длину, представляющую скользящее среднее, которое учитывает поведение водителя в отношении потреблений, которые оценены на множестве временных периодов измерения, заключенных между началом движения и остановкой. Таким образом, водитель, наблюдающий за своим собственным смартфоном 4, будет способен быстро осознать стиль вождения, который принимается, для того чтобы быть способным улучшать его, ведя себя более осмотрительно, для того чтобы снизить потребление и улучшить безопасность какого-либо количества пассажиров транспортируемых элементов.
Заявитель произвел экспериментальные измерения посредством оценки поведения различных водителей на одном и том же пути и в сравнимых условиях дорожного движения, и смог пронаблюдать, как оба описанных способа дают возможность идентифицировать разные стили вождения, ассоциативно связанные с разными водителями.
Со ссылкой на способ 200 оценки по фиг. 2, должно быть отмечено, что предпочтение использования для сравнения, на котором основана оценка, эталонной характеристики, полученной фильтрацией нижних частот измеренной характеристики, делает особенно реалистичной выполненную оценку по той причине, что избегают рассматривать неэффективные те поведения водителя, которые были неизбежны, например, будучи вызванными дорожным движением, светофорами или прочим.
Заявитель воспринял и применил то обстоятельство, что этот подход выглядит гораздо лучше, чем подход, согласно которому оценка основывалась на сравнении между измеренной кинематической характеристикой с «оптимальной» рабочей характеристикой, предопределенной у той же самой кинематической характеристики, просто полученной на основе модели моторного транспортного средства и на основе общего анализа, произведенного априори, пути, покрываемого моторным транспортным средством.
Как упомянуто ранее, результаты оценки также могут делаться имеющимися в распоряжении пунктом наблюдения, на котором могли бы выполняться дополнительные расчеты и статистика, посредством создания отчетов в отношении поведения водителей.
Должно быть отмечено, что даже если в описании, приведенном выше, зачастую ссылка делалась в контексте автобусов для перевозки пассажиров, описанные доктрины также применимы к другим наземным транспортным средствам (например, такси, сдаваемым внаем автомобилям или грузовикам) или к морским транспортным средствам (например, моторным судам или судам на подводных крыльях), либо к самолетам (например, аэропланам или вертолетам) для транспортировки пассажиров и/или товаров.

При оценке стиля вождения моторного транспортного средства формируют (201) из измерений сигнал скорости, представляющий изменение (v(t)) скорости моторного транспортного средства. Осуществляют (202) фильтрацию нижних частот сигнала скорости, получая соответствующий эталонный фильтрованный сигнал, ассоциативно связанный с эталонным изменением скорости (v(t)) моторного транспортного средства. Вычисляют (203) по сигналу скорости и модели описания моторного транспортного средства оценку энергии (Е1), используемой моторным транспортным средством, вдоль пути измерения. Вычисляют (204) по эталонному фильтрованному сигналу и упомянутой модели описания моторного транспортного средства эталонную энергию (Е2), ассоциативно связанную с эталонным изменением. Сравнивают (205) упомянутую энергию с эталонной энергией и выдают показание (IND1) о стиле вождения в зависимости от смещения между энергией и эталонной энергией. Предложена также система оценки стиля вождения. Достигается определение стиля вождения. 2 н. и 10 з.п. ф-лы, 9 ил.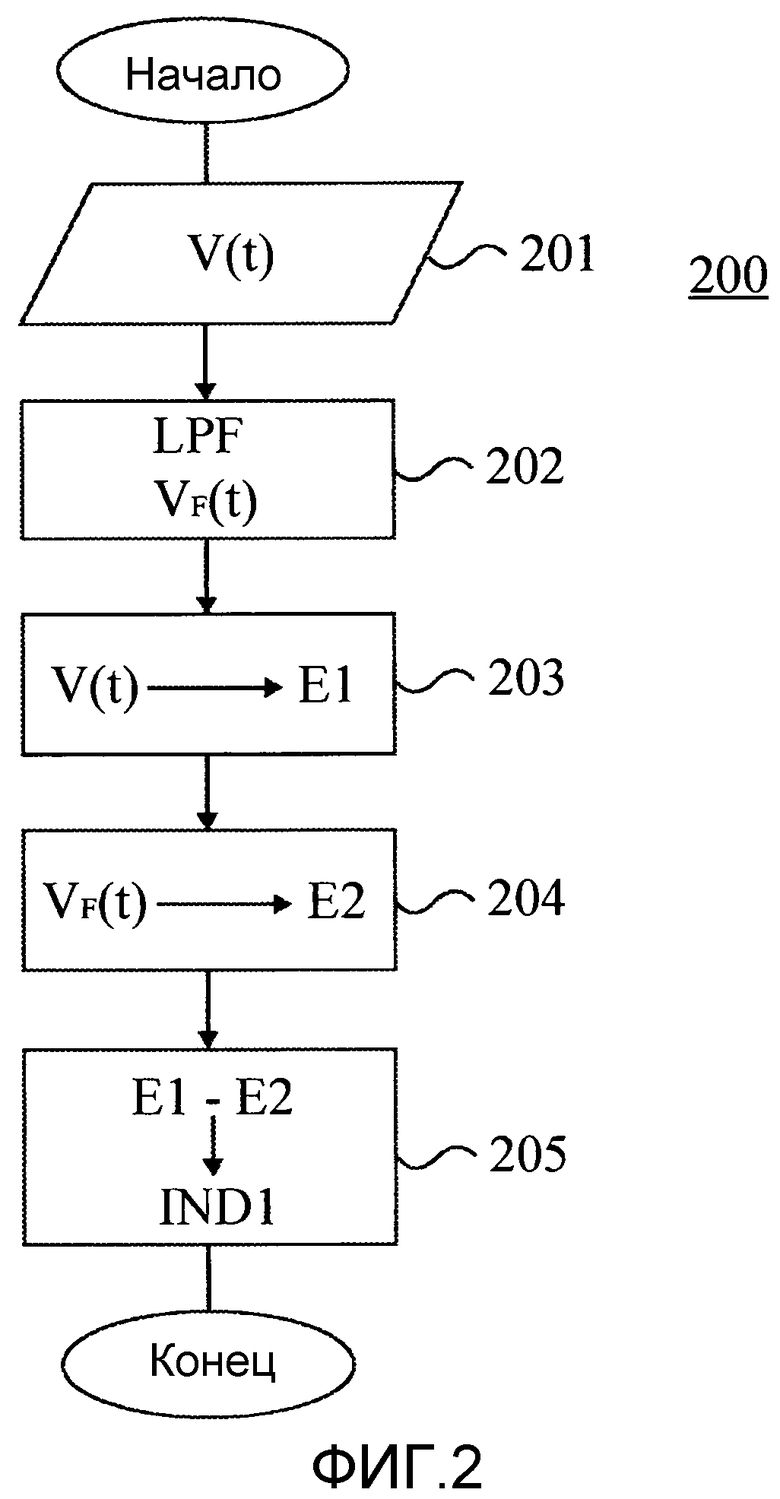
1. Система (110) оценки стиля вождения моторного транспортного средства, содержащая:
- устройство (1) измерения кинематического сигнала, представляющего изменение (v(t)) количества движения моторного транспортного средства вдоль пути измерения;
отличающаяся тем, что она дополнительно содержит:
- модуль (8) фильтрации нижних частот, сконфигурированный с возможностью фильтровать кинематический сигнал и выдавать соответствующий эталонный фильтрованный сигнал, ассоциативно связанный с эталонным изменением количества (vF(t));
- модуль (2) обработки, содержащий:
вычислительный модуль (10), сконфигурированный с возможностью:
вычислять (203) по кинематическому сигналу и модели описания моторного транспортного средства оценку энергии, используемой моторным транспортным средством, (Е1) вдоль пути измерения;
вычислять (204) по эталонному сигналу и упомянутой модели описания моторного транспортного средства эталонную энергию (Е2), ассоциативно связанную с эталонным изменением;
первый модуль (9) оценки, сконфигурированный с возможностью сравнивать (205) упомянутую энергию с эталонной энергией и выдавать показание (IND1) о стиле вождения в зависимости от смещения между энергией и эталонной энергией.
2. Система (100) оценки по п.1, в которой устройство (1) измерения сконструировано так, чтобы такое количество являлось скоростью, и кинематический сигнал являлся сигналом скорости, представляющим изменение скорости моторного транспортного средства; модуль (8) фильтрации является сконфигурированным так, чтобы фильтрованный сигнал был эталонным сигналом скорости.
3. Система (100), по меньшей мере, по одному из предыдущих пунктов, в которой устройство (1) измерения и модуль (8) фильтрации являются такими, что кинематический сигнал и эталонный сигнал являются цифровыми сигналами, и при этом вычислительный модуль (10) сконфигурирован с возможностью:
оценивать мощность, выдаваемую двигателем моторного транспортного средства, на основании кинематического сигнала и модели моторного транспортного средства и рассчитывать упомянутую энергию по упомянутой мощности;
оценивать эталонную мощность, ассоциативно связанную с эталонным изменением и моделью моторного транспортного средства, и рассчитывать эталонную энергию по эталонной мощности.
4. Система (100) по п.1, сконфигурированная так, чтобы показание о стиле вождения выдавалось в конце временного интервала, ассоциативно связанного с путем измерения и заключенного между моментом начала движения и моментом остановки моторного транспортного средства.
5. Система (100) по п.4, содержащая модуль (10) автоматической оценки для автоматической оценки моментов остановки и начала движения моторного транспортного средства, который действует согласно сигналам, принятым из устройства (1) измерения.
6. Система (100) по п.1, в которой устройство (1) измерения сконфигурировано с возможностью получать сигнал ускорения, представляющий ускорение моторного транспортного средства, модуль (2) обработки дополнительно содержит:
модуль (10) взятия производной сигнала ускорения, сконфигурированный с возможностью возвращать сигнал рывка, представляющий временное измерение упомянутого сигнала ускорения;
модуль (7) хранения, сконфигурированный для хранения множества отсчетов, каждый из которых указывает значение ускорения и соответствующего значения рывка;
второй модуль (11) оценки, сконфигурированный с возможностью сравнивать пары значений ускорения и рывка с эталонными значениями и выдавать дополнительное показание стиля вождения моторного транспортного средства, имеющего отношение к безопасности вождения моторного транспортного средства.
7. Система (100) по п.6, в которой упомянутое ускорение является амплитудой результирующего ускорения (ares) векторной суммы продольного ускорения моторного транспортного средства и поперечного ускорения моторного транспортного средства.
8. Система (100) по п.1, в которой упомянутое устройство измерения содержит, по меньшей мере, одно из следующих устройств: приемника GPS, датчика скорости, датчика ускорения, инерциальной измерительной системы.
9. Система (100) по п.1, в которой устройство (1) измерения сконструировано так, чтобы отправлять измерительные сигналы в модуль (8) фильтрации и в модуль (2) обработки согласно режиму беспроводной связи.
10. Система (100) по п.1, содержащая устройство (4; 2) отображения, приспособленное, чтобы делать показания стиля вождения и/или дальнейшие показания стиля вождения имеющегося в распоряжении у водителя моторного транспортного средства.
11. Система (100) по п.2, в которой устройство измерения содержит:
измерительное устройство (6), сконструированное, чтобы выдавать первый сигнал скорости моторного транспортного средства;
измеритель (5) ускорения, сконструированный, чтобы выдавать сигнал продольного ускорения моторного транспортного средства;
и при этом модуль (2) обработки содержит модуль (300) предварительной обработки частотного разделения, сконфигурированный с возможностью:
осуществлять (HPF1, 303) фильтрацию нижних частот первого сигнала скорости;
осуществлять (HPF2) фильтрацию верхних частот сигнала продольного ускорения;
интегрировать (INT) сигнал продольного ускорения, являющийся результатом фильтрации верхних частот, для того чтобы получать второй сигнал скорости;
комбинировать (303; 304) первый сигнал скорости, второй сигнал скорости и первый сигнал скорости в качестве являющихся результатом фильтрации, для того чтобы получать упомянутый сигнал скорости, представляющий изменение скорости моторного транспортного средства.
12. Способ для оценки стиля вождения моторного транспортного средства, состоящий в том, что:
формируют (201) из измерений кинематический сигнал, представляющий изменение (v(t)) количества движения моторного транспортного средства, вдоль пути измерения;
осуществляют (202) фильтрацию нижних частот кинематического сигнала, получая соответствующий эталонный фильтрованный сигнал, ассоциативно связанный с эталонным изменением упомянутого количества (vF(t)) движения моторного транспортного средства;
вычисляют (203) по кинематическому сигналу и модели описания моторного транспортного средства оценку энергии (Е1), используемой моторным транспортным средством, вдоль пути измерения;
вычисляют (204) по эталонному фильтрованному сигналу и упомянутой модели описания моторного транспортного средства эталонную энергию (Е2), ассоциативно связанную с эталонным изменением;
сравнивают (205) упомянутую энергию с эталонной энергией и выдают показание (IND1) о стиле вождения в зависимости от смещения между энергией и эталонной энергией.
| WO 00/07150 A1, 10.02.2000 | |||
| Устройство для регистрации времени работы транспортного средства в разных режимах | 1986 |
|
SU1376112A1 |
| Комбинированная ситчато-колпачковая тарелка для ректификационных аппаратов | 1948 |
|
SU81691A1 |

