Область техники, к которой относится изобретение
Изобретение относится к способу автономного программирования манипулятора с цифровым управлением по пункту 1 формулы изобретения, системе автономного программирования по пункту 17 и системе манипуляторов по пункту 18 формулы изобретения.
Уровень техники
В настоящее время в автоматизированном производстве манипуляторы с цифровым управлением часто бывают выполнены в виде шарнирно сочлененных роботов со свободой поворота суставов вокруг шести осей. Вследствие сложности рабочих процессов программирование таких манипуляторов предъявляет высокие требования к пользователю.
Для того чтобы тратить как можно меньше времени на программирование в режиме онлайн, во многих областях перешли к преимущественному так называемому офлайн-программированию или автономному программированию, при котором могут моделироваться и программироваться траектории движения (см. патентный документ ЕР 1832947 А2). С помощью этой системы автономного программирования возможны также моделирование и программирование траекторий движения с поддержкой датчика. Соответственно, для моделирования и программирования предусмотрен датчик, предназначенный для манипулятора. В этом случае в постпроцессоре регулярно генерируется программа цифрового управления, так что смоделированные виртуальные траектории движения переводятся в реальные траектории движения.
При автономном программировании проблемы создаются вследствие того, что реальные данные никогда не соответствуют полностью виртуальным данным. Это относится к геометрическим отклонениям в манипуляторе и в окружающих компонентах, таких как обрабатываемые детали. Однако это относится также и к техническим мерам по осевой компенсации для компенсации изменений кинематики манипулятора, вызванных окружающими условиями.
Первые указанные отклонения поддаются коррекции с помощью датчиков. Эта коррекция всегда связана с определенным сдвигом центральной точки инструмента (TCP - от англ. Tool-Center-Point) манипулятора. В отличие от этого последние указанные отклонения проявляются в виде смещений координат осей.
Отклонения обоих видов могут приводить к тому, что манипулятор при работе входит в состояние сингулярности, то есть нерегулярности или неоднозначности поведения. Это, как правило, связано с простоями производственной линии и необходимостью переработки траекторий движения. Повторный запуск и производственные простои в большинстве случаев связаны с высокими затратами.
Раскрытие изобретения
Задачей изобретения является создание способа автономного программирования манипулятора с цифровым управлением, в котором в реальном производстве снижен риск возникновения сингулярности.
В соответствии с изобретением решение поставленной задачи достигается за счет способа автономного программирования манипулятора с цифровым управлением по пункту 1 формулы изобретения.
Предлагаемый способ автономного программирования манипулятора с цифровым управлением, который при рабочей эксплуатации своей центральной точкой инструмента (TCP), следует, по меньшей мере, по одной реальной траектории движения, обслуживается окружением автономного программирования с пользовательским интерфейсом. В окружении автономного программирования записаны кинематическая модель манипулятора и, при определенных условиях, модель окружения,
Существенно то, что посредством окружения автономного программирования в ходе программы определения определяют не только, по меньшей мере, одну виртуальную траекторию движения манипулятора, но также относящееся к этой траектории движения пространство допусков. При этом пространство допусков отображает отклонения от виртуальной траектории движения.
Пространство допусков может быть определено как объем, как множество отрезков траектории движения, как облако точек или подобным образом. При этом существенно, что в любом случае пространство допусков охватывает геометрические отклонения траектории, происходящие при реальной эксплуатации. Соответственно, пространство допусков окружает большую часть относящейся к нему траектории движения или, во всяком случае, примыкает к относящейся к нему траектории движения.
Далее, существенно то, что посредством окружения автономного программирования в ходе программы проверки проверяют предварительно определенное поле допусков, по меньшей мере, частично в отношении кинематических сингулярностей манипулятора. При появлении сингулярности вслед за этим выполняется программа сингулярности.
Понятие «появление сингулярности» здесь толкуется в широком смысле. Под этим понятием имеется в виду, с одной стороны, непосредственное позиционирование в месте сингулярности и, с другой стороны, приближение на предварительно определенное расстояние к месту сингулярности.
Понятие «сингулярность» также толкуется в широком смысле. Оно охватывает как «сингулярность» в классическом смысле, в котором оно подразумевает определенную конфигурацию осей, при которой две оси расположены соосно друг другу. Однако здесь понятие «сингулярность» относится также к простой неоднозначности в конфигурации осей, которая влечет за собой недостижимость точки траектории и столкновение манипулятора с самим собой. Далее, понятие «сингулярность» может относиться к нестабильности следования по траектории. В целом под «сингулярностью» имеется в виду состояние, которое не может быть преобразовано системой цифрового управления без дополнительных мер и поэтому, как правило, связано с остановкой цифрового управления.
С помощью предлагаемого способа обеспечивается возможность отобразить все указанные отклонения траектории посредством пространств допусков. За счет того что полная проверка на сингулярность не только траекторий движения, но также и пространств допусков может выполняться в автономном режиме эксплуатации, в значительной степени исключается появление сингулярностей в последующей реальной рабочей эксплуатации.
В предпочтительном особенно простом для реализации варианте в ходе программы сингулярности пользователю выдается только предупредительное сообщение через пользовательский интерфейс. В этом случае пользователь может модифицировать запрограммированную траекторию движения таким образом, что в относящемся к ней пространстве допусков уже не появляется сингулярностей. Соответственно, устранение сингулярностей является интерактивным процессом (пункт 2 формулы изобретения).
Предпочтительно предусмотрено, что после устранения всех сингулярностей виртуальные траектории движения переводят в инструкции программы цифрового управления (пункт 3 формулы изобретения).
В принципе можно сделать так, чтобы виртуальные пространства допусков не имели никакого входа в программу цифрового управления и привлекались только при автономной проверке на сингулярности. Однако предпочтительно виртуальное пространство допусков включают в генерирование программы цифрового управления таким образом, что при рабочей эксплуатации пересечение границ соответствующего реального пространства допусков блокируют с помощью техники управления. В этом случае во избежание сингулярностей пользователь может предпринять уменьшение соответствующего пространства допусков в эксплуатации в режиме автономного программирования.
В принципе программа определения допускает дальнейшую автоматизацию. Для этого окружением программирования предоставляется в распоряжение соответствующая информация о рабочем процессе, который, помимо прочего, представляет собой последовательность следования по траекториям движения и/или обработки функций датчика и/или обработки технологических функций (пункт 5 формулы изобретения).
В предпочтительном примере осуществления по пункту 6 формулы изобретения в альтернативном варианте виртуальная траектория движения генерируется автоматически на основе записанного рабочего процесса.
В предпочтительном примере осуществления по пункту 11 формулы изобретения, по меньшей мере, одно пространство допусков, по меньшей мере, частично определяют из фиктивных отклонений траектории, которые могут максимально создаваться в результате осевой компенсации в каждой точке траектории при предполагаемой первоначальной кинематике манипулятора. Под «первоначальной кинематикой» здесь имеется в виду состояние кинематики манипулятора, которая не подверглась каким-либо изменениям под действием температуры, нагрузки и других факторов. Можно также сказать, что осевую компенсацию применяют в первоначальной кинематике манипулятора, так что смещения осей переводятся в соответствующие отклонения траектории.
Благодаря этому сингулярности, которые обусловлены совершенно определенной конфигурацией осей и при реальной рабочей эксплуатации вызываются осевой компенсацией средствами техники управления, отображаются в пространстве допусков и могут быть определены в рамках программы проверки. В особенно предпочтительном примере осуществления соответствующие отклонения траектории суммируются с указанными выше отклонениями траектории, обусловленными позиционными отклонениями.
Согласно дальнейшей имеющей самостоятельное значение изобретательской идее по пункту 17 формулы изобретения заявленным объектом является система автономного программирования для манипулятора с цифровым управлением, причем предусмотрена компьютерная система, которая предоставляет в распоряжение окружение автономного программирования для выполнения описанного выше предлагаемого способа. В этом отношении действительна ссылка на все примеры осуществления предлагаемого способа.
Согласно дальнейшей имеющей самостоятельное значение изобретательской идее заявленным объектом является система манипуляторов с манипулятором с цифровым управлением, системой цифрового управления и описанной выше системой автономного программирования. В этом отношении действительна ссылка на все примеры осуществления системы автономного программирования и предлагаемого способа.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будет подробно описан только один пример осуществления изобретения. На чертежах:
фиг.1 изображает тактовую производственную линию с манипуляторами, в которой используется предлагаемый способ автономного программирования,
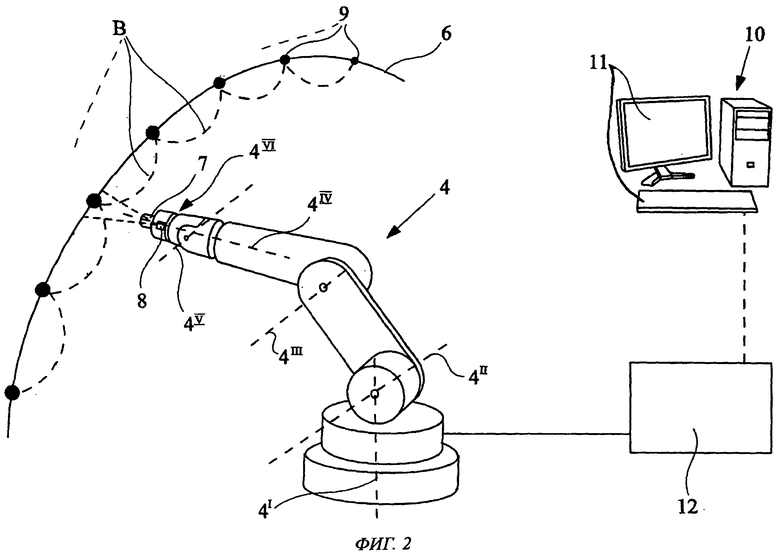
фиг.2 очень схематично изображает один из манипуляторов по фиг.1 в ходе реальной рабочей эксплуатации,
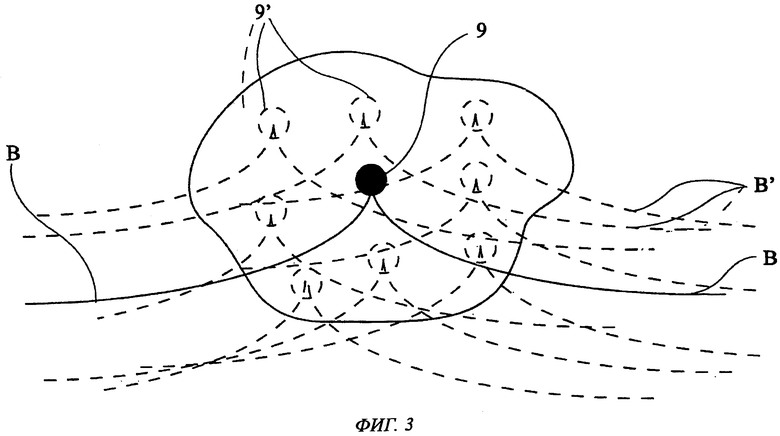
фиг.3 изображает подлежащую достижению точку и реальную траекторию движения для манипулятора по фиг.2,
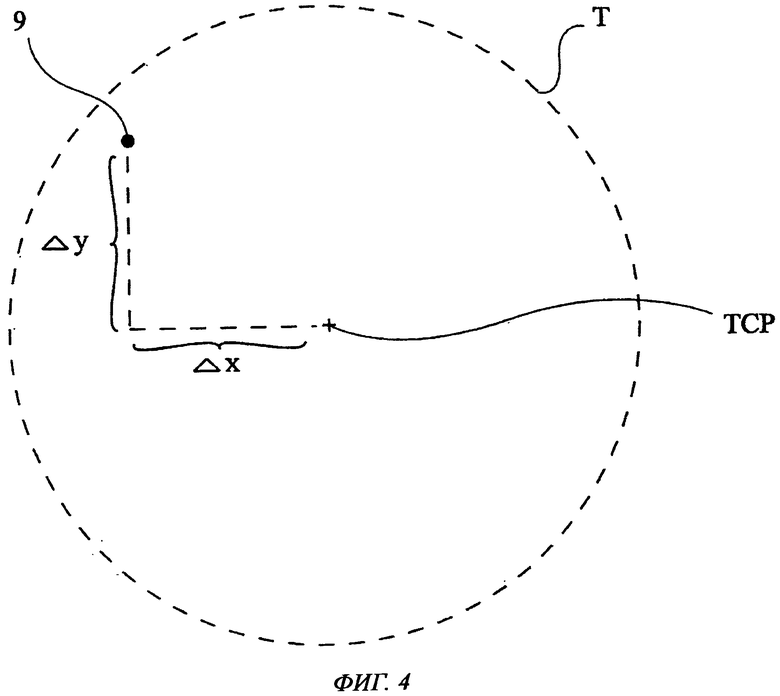
фиг.4 изображает принципиальную схему действия оптического датчика при приближении манипулятора к точке по фиг.3,
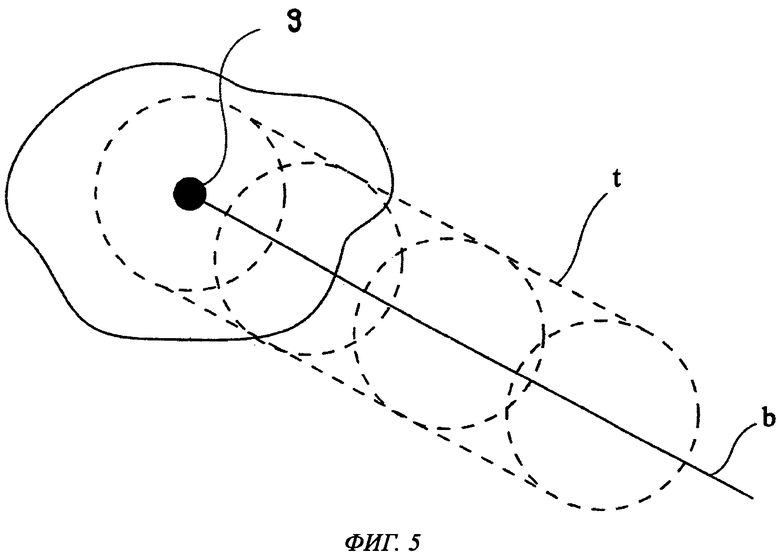
фиг.5 изображает в качестве примера отрезок виртуальной траектории движения с относящимся к ней пространством допусков в окружении автономного программирования.
Осуществление изобретения
Показанная на фиг.1 производственная линия 1 служит для обработки самолетных конструктивных деталей 2a-2f. Она оснащена пятью постами 3а-3е обработки, причем каждый из них оборудован обрабатывающим станком 4а-4е, здесь в виде манипулятора 4а-4е с цифровым управлением. Само собой разумеется, что пост 3 обработки может быть оборудован двумя или несколькими обрабатывающими станками 4.
В показанном предпочтительном примере осуществления самолетными конструктивными деталями являются секции 2a-2f фюзеляжа самолета, которые подаются через посты 3а-3е обработки вдоль своих продольных осей. При этом продольные оси проходят параллельно направлению подачи, которое на фиг.1 обозначено стрелкой 5.
Самолетные конструктивные детали 2a-2f снабжены рядом схематично показанных на фиг.1 параллельных шпангоутов 6, которые проходят по существу перпендикулярно направлению 5 подачи.
На фиг.2 в качестве примера показан один манипулятор 4 из представленных на фиг.1 манипуляторов 4а-4е. В показанном примере выполнения на шпангоутах 6 подлежат выполнению операции клепки. Для этого манипулятор 4 снабжен схематично показанным на фиг.2 клепальным инструментом 7.
Для пояснения предлагаемого способа автономного программирования описанный выше процесс производства самолетов выступает на передний план. Однако это не следует понимать как ограничение. Предлагаемый способ может использоваться везде, где в реальной эксплуатации манипулятор 4 со своей центральной точкой инструмента (TCP) следует по меньшей мере по одной реальной траектории движения при определенных условиях с поддержкой датчика,
Для выполнения траектории В движения с поддержкой датчика здесь манипулятор 4 предпочтительно оснащен датчиком 8, например камерой на приборе с зарядовой связью (ПЗС-камерой), лазерным следящим устройством, лазерным дальномером или подобным устройством.
Датчик 8 служит, как правило, для компенсации геометрических допусков конструктивной детали и позиционных геометрических отклонений. При траектории В движения с поддержкой датчика, по меньшей мере, часть точек траектории зависят от соответствующих измеренных датчиком величин. В ходе рабочей эксплуатации манипулятор 4 следует по траектории В движения с поддержкой датчика в зависимости от измеренных датчиком величин, то есть по различным альтернативам траектории. В реальной рабочей эксплуатации происходят отклонения от первоначально запрограммированной траектории движения.
Пример траектории В движения с поддержкой датчика показан на фиг.2. Как было указано выше, манипулятор должен обойти проточки 9 для выполнения в них операций клепки. При этом при приближении к проточке 9 периодически приводится в действие датчик 8. В случае использования ПЗС-камеры измеряемые датчиком величины отображаются, как это показано на фиг.4. В показанной ситуации вследствие позиционных геометрических отклонений центральная точка TCP инструмента еще не центрирована с проточкой 9. Здесь имеется первая измеренная датчиком величина Δх, показывающая необходимое отклонение в направлении X, и вторая измеренная датчиком величина Δy, показывающая необходимое отклонение в направлении y, чтобы добиться центрирования центральной точки TCP инструмента с проточкой 9. Естественно, эти данные направлений приведены только в качестве примера.
Таким образом, при сопоставлении фиг.2, 3 и 4 становится ясно, что вследствие позиционных отклонений проточек 9 создаются отклонения траектории В движения. К этим отклонениям траектории следует адаптировать примыкающие траектории движения, чтобы обеспечить непрерывный ход траекторий. Это четко показано на фиг.3, где сплошными линиями показаны подлежащая достижению проточка 9 и относящаяся к ней траектория В движения, а штриховыми линиями показаны различные позиционные альтернативы 9' и относящиеся к ней альтернативные траектории В' движения.
В том случае, когда траектория В движения находится в непосредственной близости к сингулярности манипулятора 4, указанные выше отклонения траектории связаны с риском фактического попадания в сингулярность. Именно эту проблему решает настоящее изобретение.
Предлагаемый способ обслуживается окружением 10 автономного программирования с пользовательским интерфейсом 11, схематично показанным на фиг.2. В окружении 10 автономного программирования, которое предпочтительно базируется на персональном компьютере, записана кинематическая модель манипулятора и предпочтительно также модель окружения. Кинематическая модель манипулятора содержит все данные, необходимые для воспроизведения кинематики манипулятора 4. К ним относятся, помимо прочих, положение осей 4I-4VI манипулятора, области поворота осей 4I-4VI манипулятора и другие конструктивные подробности кинематической схемы манипулятора 4.
Модель окружения содержит геометрические данные компонентов, с которыми должен взаимодействовать манипулятор 4. К ним относятся, например, данные конструктивных деталей 2 - здесь указанных выше шпангоутов 6.
Окружение 10 автономного программирования регулярно выполняет также графическое моделирование моделируемых компонентов и их движений. Посредством окружения 10 автономного программирования в ходе программы определения можно определять, по меньшей мере, одну виртуальную траекторию b движения манипулятора 4. В этом аспекте окружение 10 автономного программирования имеет обычную структуру.
Существенным является то, что может быть также определено относящееся к виртуальной траектории b движения виртуальное пространство t допусков, которое отображает отклонения от виртуальной траектории b движения.
Эти автономно определенные пространства t допусков могут выявлять какие-либо отклонения траектории, которых можно ожидать в реальной рабочей эксплуатации. В частности, к ним относятся описанные выше отклонения траектории при поддерживаемой датчиком компенсации конструктивных и позиционных допусков. Каждому виртуальному пространству t допусков соответствует реальное пространство Т допусков, значение которого будет пояснено дальше. Реальное пространство Т допусков схематично обозначено на фиг.4.
Как будет объяснено дальше, виртуальное пространство t допусков может быть определено самым различным образом. Одна возможность состоит в том, что пространство t допусков определяется как объем. На фиг.5 в качестве примера показано пространство t допусков в форме трубчатой оболочки, относящейся к траектории b движения.
Другая возможность определения пространства t допусков состоит в том, что оно определяется как количество отрезков траектории или как облако точек. В экстремальном случае пространство t допусков содержит всего один отрезок траектории или всего одну точку.
Представляет интерес тот факт, что по меньшей мере, одно пространство t допусков подвергается проверке на сингулярность. В частности, посредством окружения 10 автономного программирования в ходе программы проверки предварительно определенное пространство t допусков проверяют, по меньшей мере, частично в отношении кинематических сингулярностей манипулятора 4, при этом в случае появления сингулярности выполняют соответствующую программу сингулярности. Широкое толкование понятия «появление сингулярности» было указано выше.
Выполнение программы проверки возможно в самых различных вариантах. В особенно простом варианте каждую принадлежащую пространству t допусков точку траектории проверяют отдельно на сингулярность манипулятора 4. Однако возможна также совместная проверка всех альтернатив траектории, которые вписываются в пространство t допусков, так что определяются также разрывы непрерывности в альтернативах траектории, которые при определенных условиях могут интерпретироваться как сингулярность.
В простейшем и предпочтительном случае предусмотрено, что в ходе программы сингулярности при определении сингулярности окружение 10 автономного программирования выдает пользователю предупредительное сообщение через пользовательский интерфейс 11.
В качестве реакции на предупредительное сообщение пользователь может изменить виртуальную траекторию b движения и/или относящееся к этой траектории b движения виртуальное пространство t допусков таким образом, чтобы сингулярность не появлялась.
В том случае когда сингулярность вызвана неоднозначностью в конфигурации осей, другая возможная реакция на предупредительное сообщение состоит в том, что виртуальная траектория b движения определяется в координатах осей, так что конфигурация осей является изначально однозначной. Соответственно, окружение 10 автономного программирования предпочтительно выполнено таким образом, что определение траекторий b движения возможно как в декартовых координатах, так и в координатах осей. Однако возможно также, что окружение 10 автономного программирования допускает задание определенной конфигурации осей.
В предлагаемом способе предпочтительно программа определения и программа проверки выполняются многократно, пока не будет достигнуто отсутствие сингулярности в его указанном выше толковании.
Далее в ходе программы постпроцессора виртуальная, при определенных условиях поддерживаемая датчиком, траектория b движения преобразуется в инструкции программы цифрового управления для манипулятора 4.
В заключение программа цифрового управления загружается в систему 12 цифрового управления манипулятора 4, так что, по меньшей мере, одна виртуальная, при определенных условиях поддерживаемая датчиком, траектория b движения при запрограммированной эксплуатации переводится в реальную, при определенных условиях поддерживаемую датчиком, траекторию В движения. В частности, в ходе программы постпроцессора учитывается, определена ли виртуальная траектория b движения в декартовых координатах или в координатах осей.
Предпочтительно в генерирование программы цифрового управления включается также виртуальное пространство t допусков. При этом предусмотрено, что при рабочей эксплуатации пересечение геометрических границ соответствующего реального пространства Т допусков блокируется с помощью технических средств управления. Предпочтительно это связано с остановкой манипулятора 4. В данном контексте понятие «блокируется» следует понимать широко без ограничения только блокированием движения манипулятора 4. Оно может, например, охватывать также обход точек траектории таким образом, что при рабочей эксплуатации уже не происходит пересечение геометрических границ соответствующего реального пространства Т допусков.
Помимо, по меньшей мере, одной траектории b движения, в окружении 10 программирования предпочтительно записан также рабочий процесс, который, помимо прочего, представляет последовательность следования по траекториям b движения, и/или обработки функций датчика, и/или обработки технологических функций. Технологическая функция заключается, например, в выполнении операции клепки. Рабочий процесс является, как правило, частью более общего рабочего процесса.
В принципе возможно выполнение программы определения по существу вручную. В этом случае предпочтительно в ходе программы определения, по меньшей мере, одну виртуальную траекторию b движения вводят или изменяют через пользовательский интерфейс 11 и, в частности, программируют в режиме виртуального обучения. Однако возможен также вариант, в котором в ходе программы определения, по меньшей мере, одна виртуальная траектория b движения генерируется в основном автоматически, предпочтительно на основе записанного рабочего процесса. Такое автоматическое планирование траектории генерируется, например, из рабочего процесса, охватывающего ряд операций клепки. Автоматическое планирование траектории представляет для пользователя особенно удобный вариант.
В особенно простом для реализации альтернативном варианте в ходе программы определения пространство t допусков может быть введено или изменено вручную через пользовательский интерфейс 11. Однако и здесь возможно автоматическое или полуавтоматическое определение.
Для ручного определения пространства t допусков с помощью окружения 10 программирования возможны различные варианты. Для случая определения в виде объема предпочтительно предусмотрено, что пространство t допусков может определяться в различных геометрических формах. Для этого предпочтительно решение, при котором пространство t допусков определяется по существу в виде трубчатой оболочки, которая окружает соответствующую виртуальную траекторию b движения (фиг.5). Однако возможно также представление пространства t допусков прямоугольным или подобной формы. Предпочтительно для этого окружение 10 программирования предоставляет геометрические модули, из которых может быть собрано пространство t допусков.
В отличие от этого для случая определения пространства t допусков в виде множества отрезков траектории возможно, что пользователь при графическом моделировании выбирает одну из уже определенных траекторий b движения посредством соответствующего ввода данных пользователем, задает желаемое отклонение траектории и привязывает его к соответствующему пространству t допусков. Это может повторяться сколько угодно раз в зависимости от желаемого числа участков траектории.
И наконец, для случая определения пространства t допусков в виде облака точек возможен процесс, при котором пользователь выбирает отдельные точки в графической модели и привязывает их к соответствующему пространству t допусков.
Независимо от определения конкретного пространства t допусков оно может быть определено предпочтительно автоматически или в любом случае полуавтоматически. Для этого предпочтительно предусмотрено, что модель манипулятора содержит модель датчика, в которой в любом случае воспроизведена область измерений датчика. Далее, модель датчика содержит также взаимосвязь между величинами измерения датчиком и вытекающими из них движениями манипулятора 4. Из этого может быть автоматически определена, по меньшей мере, принципиальная структура пространства t допусков. Предпочтительно далее пространство t допусков определяется, по меньшей мере, частично из последовательности обработки, и/или из модели датчика, и/или при определенных условиях из дополнительных данных, вводимых пользователем. Вводимые пользователем данные относятся, например, к ограничению величин пространства t допусков.
Современные системы 12 цифрового управления для манипуляторов 4, как правило, оснащены средствами автоматической осевой компенсации. Осевая компенсация устанавливает смещение оси, по меньшей мере, для одной оси 4I-4VI манипулятора для учета изменений кинематики манипулятора. Такие изменения кинематики манипулятора вызываются предварительно определенными условиями окружения, такими как температура, нагрузка и другие.
Указанная выше осевая компенсация при неизменном абсолютном положении центральной точки TCP инструмента приводит к изменению конфигурации осей. В принципе это может приводить к сингулярности конфигурации осей из-за осевой компенсации. Для того чтобы проверить в автономном режиме вход конфигурации осей в сингулярность, в ходе программы определения, по меньшей мере, одно пространство t допусков, по меньшей мере, частично определяют из фиктивных отклонений траектории, которые могут максимально создаваться в каждой точке траектории при первоначальной кинематике манипулятора в результате осевой компенсации. Таким образом, определяющее пространство t допусков отклонения траектории создается только за счет теоретического смещения отдельных осей 4I-4VI манипулятора в результате осевой компенсации первоначальной кинематики манипулятора.
Обоснованным образом для определения пространства t допусков определяемые из осевой компенсации отклонения траектории суммируются с отклонениями траектории, вызванными геометрическими позиционными отклонениями. Основанием для этого является тот факт, что при реальной рабочей эксплуатации эти отклонения также накладываются друг на друга в определенной степени.
Особенно близкое к реальному автономное программирование в аспекте техники управления обеспечивается в том случае, когда ядро системы 12 цифрового управления воспроизведено в окружении 10 программирования. В особенно предпочтительном примере осуществления под «виртуальным» ядром цифрового управления имеется в виду программная копия «реального» ядра цифрового управления. В любом случае предпочтительно предусмотрена программа преобразования, с помощью которой возможно обратное преобразование данных положения и ориентации в данные осей манипулятора. При этом далее предпочтительно программа преобразования в окружении 10 программирования идентична соответствующей программе преобразования в системе 12 цифрового управления.
Программа преобразования играет существенную роль в выполнении программы проверки. С помощью программы преобразования в одном из вариантов предпочтительно каждую точку, относящуюся к пространству t допусков, проверяют на достижимость этой точки кинематикой манипулятора.
Альтернативно или дополнительно может быть предусмотрено, что в ходе программы проверки с помощью программы преобразования предпочтительно для каждой точки, относящейся к пространству t допусков, проверяют, не приводит ли эта точка к неоднозначности осевых данных манипулятора 4.
Далее, альтернативно или дополнительно может быть предусмотрена программа столкновения, с помощью которой выполняют проверку на столкновение в отношении столкновения манипулятора 4 с компонентами, воспроизведенными в модели окружения. При этом в ходе программы проверки с помощью программы столкновения предпочтительно каждую точку, относящуюся к пространству t допусков, проверяют в отношении того, не приводит ли приближение к этой точке к столкновению манипулятора 4 с компонентами, записанными в модели окружения.
Можно резюмировать, что возможность определения виртуального пространства t допусков в окружении 10 программирования позволяет в автономном режиме проверять все ожидаемые отклонения траектории в отношении сингулярностей каких-либо видов. Благодаря этому могут в значительной степени исключаться вызванные сингулярностями перерывы в производстве.
Согласно дальнейшей изобретательской идее, которая имеет самостоятельное значение, заявленным объектом является система автономного программирования для манипулятора 4 с цифровым управлением, причем предусмотрена компьютерная система, которая предоставляет в распоряжение окружение 10 автономного программирования для выполнения предлагаемого способа. В этом отношении действительна ссылка на все примеры осуществления предлагаемого способа.
Согласно дальнейшей изобретательской идее, которая имеет самостоятельное значение, заявленным объектом является система манипуляторов с манипулятором 2 с цифровым управлением, система 12 цифрового управления и описанная выше система автономного программирования. В этом отношении действительна ссылка на все примеры осуществления системы автономного программирования и предлагаемого способа.
В особенно предпочтительном примере осуществления манипулятором 4 является робот серийной кинематики, предпочтительно шарнирно сочлененный робот со свободой поворота суставов вокруг шести осей, такой как показан на фиг.2. Возможны и другие варианты выполнения манипулятора 4.
И наконец, следует отметить, что в данном примере осуществления и предпочтительно манипулятор 4 ведет инструмент 7, а именно предпочтительно клепальный инструмент 7. Здесь также возможно множество других вариантов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДЕЛИРОВАНИЯ ДВИЖЕНИЯ МАНИПУЛЯТОРА | 2015 |
|
RU2727136C2 |
| Система взаимодействия человек-робот на основе смешанной реальности | 2022 |
|
RU2813444C1 |
| СПОСОБ КАЛИБРОВКИ И ПРОГРАММИРОВАНИЯ РОБОТА | 2012 |
|
RU2605393C2 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ДОПОЛНЕННОЙ РЕАЛЬНОСТИ И РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2713570C1 |
| Робот-ассистированный комплекс минимально инвазивной абдоминальной хирургии для автоматизированного выполнения операций методами локальной деструкции новообразований печени | 2023 |
|
RU2841089C1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| СПОСОБ И СИСТЕМА ПЛАНИРОВАНИЯ ДВИЖЕНИЯ РОБОТА-МАНИПУЛЯТОРА ПУТЕМ КОРРЕКЦИИ ОПОРНЫХ ТРАЕКТОРИЙ | 2020 |
|
RU2756437C1 |
| КРАН | 2017 |
|
RU2734966C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ КОМПЛЕКС С СИСТЕМОЙ УПРАВЛЕНИЯ И НАПРАВЛЕНИЯ МАНЕВРОВ И СПОСОБ, ОСУЩЕСТВЛЯЕМЫЙ ТАКИМ КОМПЛЕКСОМ | 2016 |
|
RU2720936C2 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
Изобретение относится к способу автономного программирования манипулятора с цифровым управлением. Технический результат заключается в снижении риска возникновения сингулярности. Способ, в котором при рабочей эксплуатации своей центральной точкой инструмента (TCP) следует по меньшей мере по одной реальной траектории движения, при определенных условиях с поддержкой датчика, причем в окружении автономного программирования с пользовательским интерфейсом записаны кинематическая модель манипулятора и модель окружения манипулятора, при этом посредством окружения автономного программирования в ходе программы определения определяют, по меньшей мере, одну виртуальную траекторию движения манипулятора и относящееся к этой траектории движения пространство допусков, которое отображает отклонения траектории от виртуальной траектории движения, при этом посредством окружения автономного программирования в ходе программы проверки предварительно определенное пространство допусков проверяют по меньшей мере частично в отношении кинематических сингулярностей манипулятора и при их появлении выполняют программу сингулярности. 3 н. и 15 з.п. ф-лы, 5 ил.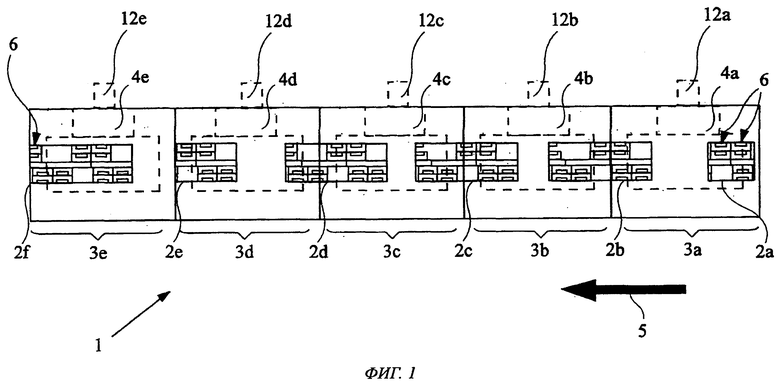
1. Способ автономного программирования манипулятора (4) с цифровым управлением, который при рабочей эксплуатации своей центральной точкой инструмента следует по меньшей мере по одной реальной траектории (В) движения при определенных условиях с поддержкой датчика,
причем в окружении (10) автономного программирования с пользовательским интерфейсом (11) записаны кинематическая модель манипулятора и, при определенных условиях, модель окружения,
при этом посредством окружения (10) автономного программирования в ходе программы определения определяют по меньшей мере одну виртуальную траекторию (b) движения манипулятора (4) и относящееся к этой траектории (b) движения пространство (t) допусков, которое отображает отклонения траектории от виртуальной траектории (b) движения, при этом посредством окружения (10) автономного программирования в ходе программы проверки предварительно определенное пространство (t) допусков проверяют, по меньшей мере, частично в отношении кинематических сингулярностей манипулятора (4), при появлении которых выполняют программу сингулярности.
2. Способ по п.1, отличающийся тем, что окружение (10) программирования в ходе программы сингулярности выдает пользователю предупредительное сообщение через пользовательский интерфейс (11).
3. Способ по п.1, отличающийся тем, что в ходе программы постпроцессора виртуальная, при определенных условиях поддерживаемая датчиком, траектория (b) движения преобразуется в инструкции программы цифрового управления для манипулятора (4), которую загружают в систему (12) цифрового управления манипулятора (4), так что по меньшей мере одна виртуальная, при определенных условиях поддерживаемая датчиком, траектория (b) движения при запрограммированной эксплуатации переводится в реальную, при определенных условиях поддерживаемую датчиком, траекторию (В) движения.
4. Способ по п.3, отличающийся тем, что виртуальное пространство (t) допусков включают в генерирование программы цифрового управления таким образом, что при рабочей эксплуатации пересечение границ соответствующего реального пространства (Т) допусков блокируют с помощью техники управления и предпочтительно оно приводит к остановке манипулятора (4).
5. Способ по любому из пп.1-4, отличающийся тем, что в окружении (10) программирования записан, по меньшей мере, один рабочий процесс, который, помимо прочего, представляет собой последовательность следования по траекториям (В) движения, и/или обработки функций датчика, и/или обработки технологических функций.
6. Способ по любому из пп.1-4, отличающийся тем, что в ходе программы определения по меньшей мере одну виртуальную траекторию (b) движения вводят или изменяют через пользовательский интерфейс (11), в частности программируют в режиме виртуального обучения, или виртуальная траектория (b) движения генерируется автоматически при определенных условиях на основе записанного рабочего процесса.
7. Способ по любому из пп.1-4, отличающийся тем, что в ходе программы определения пространство (t) допусков вводят или изменяют вручную через пользовательский интерфейс (11).
8. Способ по любому из пп.1-4, отличающийся тем, что пространство (t) допусков может определяться с помощью окружения (10) программирования в различных геометрических формах, при этом предпочтительно пространство (t) допусков определяют по существу в виде трубчатой оболочки, которая окружает соответствующую виртуальную траекторию (b) движения.
9. Способ по любому из пп.1-4, отличающийся тем, что модель манипулятора содержит модель датчика, в которой воспроизведена область измерений датчика и предпочтительно взаимосвязь между величинами измерения датчиком и вытекающими из них движениями манипулятора (4).
10. Способ по любому из пп.1-4, отличающийся тем, что в ходе программы определения по меньшей мере одно пространство (t) допусков определяют, по меньшей мере, частично из последовательности обработки, и/или из модели датчика, и/или при определенных условиях из дополнительных данных, вводимых пользователем.
11. Способ по любому из пп.1-4, отличающийся тем, что система (12) цифрового управления манипулятора (4) обеспечивает автоматическую осевую компенсацию, которая устанавливает смещение оси по меньшей мере для одной оси (4I-4VI) манипулятора для учета геометрических изменений кинематики манипулятора, которые вызываются предварительно определенными условиями окружения, такими как температура, нагрузка и другие, при этом в ходе программы определения по меньшей мере одно пространство (t) допусков, по меньшей мере, частично определяют из фиктивных отклонений траектории, которые могут максимально создаваться в результате осевой компенсации в каждой точке траектории при предполагаемой первоначальной кинематике манипулятора.
12. Способ по любому из пп.1-4, отличающийся тем, что для определения пространства (t) допусков определяемые из осевой компенсации отклонения траектории суммируются с отклонениями траектории, определяемыми при поддержке датчика.
13. Способ по любому из пп.1-4, отличающийся тем, что предусмотрена программа преобразования, с помощью которой возможно обратное преобразование данных положения и ориентации в данные осей манипулятора, при этом предпочтительно программа преобразования идентична соответствующей программе преобразования в системе (12) цифрового управления.
14. Способ по п.13, отличающийся тем, что в ходе программы проверки с помощью программы преобразования в одном из вариантов предпочтительно каждую точку пространства (t) допусков проверяют на достижимость этой точки кинематикой манипулятора.
15. Способ по п.13, отличающийся тем, что в ходе программы проверки с помощью программы преобразования в одном из вариантов предпочтительно для каждой точки пространства (t) допусков проверяют, не приводит ли эта точка к неоднозначности осевых данных манипулятора (4).
16. Способ по любому из пп.1-4, 14, 15, отличающийся тем, что предусмотрена программа столкновения, с помощью которой выполняют проверку на возможность столкновения в отношении столкновения манипулятора (4) с компонентами, воспроизведенными в модели окружения, при этом в ходе программы проверки с помощью программы столкновения предпочтительно каждую точку пространства t допусков проверяют в отношении того, не приводит ли приближение к этой точке к столкновению манипулятора (4) с компонентами, записанными в модели окружения.
17. Система автономного программирования для манипулятора с цифровым управлением, причем предусмотрена компьютерная система, которая предоставляет в распоряжение окружение автономного программирования для выполнения способа по любому из предыдущих пунктов.
18. Система манипуляторов, содержащая манипулятор с цифровым управлением и систему автономного программирования по п.17.
| DE 102008027475 A1, 10.12.2009 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| US 5414799 A, 09.05.1995 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ МНОЖЕСТВА ВЗАИМОДЕЙСТВУЮЩИХ ДРУГ С ДРУГОМ ВАЛКОВЫХ ИЛИ РОЛИКОВЫХ ЭЛЕМЕНТОВ | 2006 |
|
RU2354472C2 |
| Самозатачивающийся резец для резания горных пород | 1949 |
|
SU83728A1 |
| СИСТЕМА УПРАВЛЕНИЯ МАНИПУЛЯЦИОННЫМ РОБОТОМ | 1987 |
|
RU2027583C1 |

