Настоящее изобретение относится к области сельскохозяйственной механизации и, в частности, к проектированию, изготовлению и применению сельскохозяйственной техники, предназначенной для осуществления маневров и операций, необходимых для выращивания и уборки растительных культур.
В частности, объектами изобретения являются сельскохозяйственный комплекс, выполненный с возможностью осуществления маневров в автоматическом или полуавтоматическом режимах, а также способ автоматического или полуавтоматического управления и направления таких маневров.
Для выполнения различных сельскохозяйственных работ обычно используют сельскохозяйственные машины, приводимые в движение и в действие тракторами. Эти трактора связаны с навесными орудиями или с полунавесными машинами или с определенным числом буксируемых машин.
Такой комплекс трактор-машина(ы) или трактор-орудие(ия) называется обычно и в дальнейшем тексте настоящего описания сельскохозяйственным комплексом или механизированным сельскохозяйственным комплексом.
В частности, в рамках настоящего изобретения речь идет о применении системы и способа управления и направления повторяющихся манеров в случае комплекса трактор-орудия, предпочтительно содержащего до четырех сцепленных рабочих компонентов (в том числе трактор). Развороты на конце поля являются предпочтительным, но не ограничительным примером маневров, которых касается настоящее изобретение.
Появление механизации в сельском хозяйстве в начале 20-го века привело к использованию комплексов трактор + машина(ы), все более мощных, быстрых и имеющих большой размер. Вследствие этого появилась потребность по меньшей мере в частичной автоматизации работы, при этом исключительно человеческое участие становилось все более редким. Таким образом, в области сельскохозяйственной механизации появились многочисленные технологические инновации, относящиеся к автоматизации, в основном благодаря использованию электронных технологий и впоследствии бортовых компьютерных систем.
В настоящее время при помощи известной системы, выпускаемой компанией  Elektronik под названием "Heandland Management System", можно загружать и воспроизводить повторяющиеся задачи (изменение скорости, включение или включение отбора мощности на тракторе, подъем или опускание сцепки, …) в конце поля. С другой стороны, маневр разворота, как правило, по-прежнему осуществляет тракторист. Тракторист отслеживает приблизительную траекторию, учитывая ширину и угол поворота сельскохозяйственной машины (или всего комплекса). По мере многократного использования одной и той же комбинации между трактором и сцепленной с ним (или полунавесной) машиной оператор лучше осваивает маневр и может опытным путем оптимизировать проходимую траекторию и быстроту маневра. Однако время, затрачиваемое на маневры (в частности, в конце поля) увеличивает продолжительность работы, поскольку машина во время разворотов не работает продуктивно.
Elektronik под названием "Heandland Management System", можно загружать и воспроизводить повторяющиеся задачи (изменение скорости, включение или включение отбора мощности на тракторе, подъем или опускание сцепки, …) в конце поля. С другой стороны, маневр разворота, как правило, по-прежнему осуществляет тракторист. Тракторист отслеживает приблизительную траекторию, учитывая ширину и угол поворота сельскохозяйственной машины (или всего комплекса). По мере многократного использования одной и той же комбинации между трактором и сцепленной с ним (или полунавесной) машиной оператор лучше осваивает маневр и может опытным путем оптимизировать проходимую траекторию и быстроту маневра. Однако время, затрачиваемое на маневры (в частности, в конце поля) увеличивает продолжительность работы, поскольку машина во время разворотов не работает продуктивно.
В патентах US 8131432 В2 и US 8346443 В2 предложены способ и система для управления разворотом транспортного средства посредства задания пределов рабочей площади. Трактор сам направляется во время разворотов и контролирует, таким образом, сцепленную с ним машину.
Обязательные требования к решениям, раскрытым в этих патентах, состоят в том, чтобы:
- задавать пределы для обрабатываемого участка,
- указывать потенциальные препятствия,
- определять размеры и параметры трактора (обычно уже присутствующие в модуле управления трактором),
- определять размеры и параметры каждой сцепленной машины,
- точно определять местонахождение сельскохозяйственных машин при помощи системы типа GPS.
Сведения, указанные в этих двух документах, соответствуют системе управления направлением, известной под названием "iTEC Pro" ("Intelligent Total Equipment Control" - «Полный умный контроль оборудования») компании John DEERE. Эта система является автоматизированной, но все же пока в ней требуется указывать направление, в котором должен поворачивать трактор (вправо или влево).
Известно также автоматическое управление разворотами на зерноуборочных комбайнах. На такой самоходной машине используемые рабочие орудия (например, такие как косилочный брус) установлены непосредственно на самоходной машине и легко контролируются по положению. Современные системы этого типа (например, известные под названием "GPS PILOT FLEX") требуют для своей работы применения систем геолокализации.
Следовательно, в соответствии с известными техническими решениями разворот в конце поля можно производить при помощи следующих способов:
1. Ручное направление (наиболее распространенный способ). Тракторист оценивает «на глаз» пространство, которое можно использовать, и старается «вписать» траекторию комплекса трактор-орудия в это пространство.
2. Автоматическое направление через обучение. Эта система направления запоминает типовую траекторию, которую проходит оператор, и повторяет эту траекторию.
3. Автоматический разворот при содействии устройства геолокализации типа GPS (пользователь должен загрузить геометрию комплекса трактор-орудия и направление поворота).
Таким образом, из всего вышеизложенного следует, что автоматическое направление сельскохозяйственных орудий во время разворотов является известным способом, но применяется только в некоторых конфигурациях, описанных, например, в документах: US 8346443 В2, US 8577558 В2, ЕР 2659759 А1, US 2013/0289883 А1, US 2012/0185139 А1, US 2005/0015189 A1.
Во всех этих известных решениях автоматическим направлением маневров управляет трактор (который содержит, в случае необходимости, установленное на нем дополнительное электронное устройство) с обязательным использованием внешней системы геолокализации.
Как ручное вождение, так и известные автоматизированные решения имеют недостатки и ограничения в практическом применении, которые необходимо преодолеть.
Так, ручное вождение комплексов с буксируемыми орудиями представляет собой трудную и сложную задачу, требующую от тракториста постоянного внимания и бдительности. Увеличение ширины обработки (например, в случае культиваторов, сеялок или дисковых борон) и увеличение числа буксируемых элементов, повышение скорости обработки поля приводят к еще большему усложнению управления такими устройствами и к потенциальному риску аварий. Наиболее деликатным моментом являются маневры в конце поля, такие как развороты. Например, трактористы или операторы вынуждены снижать скорость движения и выворачивать руль в обратном направлении, чтобы компенсировать низкую маневренность больших машин, одновременно вписывая подвижный комплекс в ограниченную зону маневра в конце поля (краевая полоса). Наблюдения на поле показали, что почти 20% рабочего времени может теряться во время маневров в конце поля. Кроме того, почва краевой полосы является более плотной по причине осуществляемых на ней маневров, что снижает производительность работы. Следовательно, ширину краевых полос необходимо уменьшить до минимума, что усложняет стратегию выработки траекторий маневра. Оператору трудно учитывать все эти параметры для определения траектории в момент, когда он осуществляет маневр.
Известные автоматизированные решения, опирающиеся на использование бортовых вычислительных средств на уровне трактора, тоже имеют свои негативные стороны.
Так, когда разворотом комплекса трактор-орудия управляет сам трактор, пользователь должен указать большое число данных, относящихся к прицепным (полунавесным) элементам, чтобы трактор мог осуществить разворот в автоматическом режиме. Действительно, именно прицепное (иди полунавесное) оборудование имеет больше всего вариантов конструкции и регулировочных параметров для осуществления требуемых технических операций. Таким образом, операцию ввода данных необходимо осуществлять при каждой замене машины и для каждой новой машины, что является трудоемким процессом, может приводить к ошибкам и требует больших затрат времени.
В случае контроля со стороны трактора современные системы требуют геолокализации трактора, а также буксируемых элементов. Такое оборудование является дорогим и может иметь погрешности, в частности, в случае больших обрабатываемых площадей (связанные с неидеальной сферичностью земли). Кроме того, получение траекторий в случае известных решений не является оптимальным: прежде всего устанавливаемой траекторией является траектория трактора, тогда как важным моментом для сельскохозяйственной операции являются позиционирование и траектория буксируемых или полунавесных рабочих орудий, которые, как правило, являются самыми широкими (и, следовательно, наименее маневренными) элементами.
Наконец, в известных автоматических системах контролируют именно траекторию трактора, а также отсутствие контакта между трактором и первой прицепной машиной путем контроля расстояния между ними. Таким образом, в случае разворотов позиционирование машин или орудий на выходе и на входе рабочей зоны, которые являются самыми важными параметрами, не контролируется и тем более не гарантируется.
Задачей изобретения является преодоление по меньшей мере основных вышеупомянутых недостатков.
С учетом изложенных выше ограничений существующих систем изобретение призвано:
- предложить систему полуавтоматического или автоматического управления и направления маневров (в том числе разворотов в конце поля) комплекса трактор-машины, чтобы осуществлять эти маневры эффективно, быстро, уверенно и надежно,
- повысить эффективность работ с точки зрения скорости, энергоемкости и защиты почвы (в частности, на краевых полосах).
Таким образом, изобретение призвано предложить систему, выполненную с возможностью полностью автоматически или полуавтоматически осуществлять маневры, в частности, развороты, которая является независимой от трактора, которую можно использовать с тракторами, содержащими или нет бортовые вычислительные средства и которая выполнена с возможностью управления маневрами разворотов с предсказанием траекторий для механизированных сельскохозяйственных комплексов, включающих в себя один, два или три рабочих компонента, сцепленных с трактором.
В связи с этим объектом изобретения является комплекс, включающий в себя в качестве составных рабочих компонентов трактор и по меньшей мере одну буксируемую или полунавесную сельскохозяйственную машину, сцепленную напрямую с указанным трактором или с предыдущей машиной в комплексе при помощи по меньшей мере одного шарнирного соединения, при этом указанный комплекс содержит также систему управления и направления маневров, в частности, разворотов, содержащую по меньшей мере один блок вычисления и управления, встроенный в прицепную машину или одну из прицепных машин и связанный, с одной стороны, по меньшей мере с одним датчиком, выдающим в него текущие взаимные относительные положения двух компонентов каждой пары рабочих компонентов комплекса, соединенных между собой при помощи шарнирного соединения, с другой стороны, с блоком контроля и управления трактора и/или с интерфейсом связи, в частности, индикации и, возможно, управления для связи с трактористом и, наконец, по меньшей мере с одним средством параметризации или программирования, причем эти дополнительные функциональные компоненты, с которыми связан вышеупомянутый блок вычисления и управления, тоже являются частью системы управления и направления маневров.
Комплекс характеризуется тем, что
блок вычисления и управления прицепной сельскохозяйственной машины или одной из прицепных сельскохозяйственных машин представляет собой главный блок системы управления и направления маневров и предпочтительно комплекса, и
он выполнен с возможностью и предназначен, под контролем программы, адаптированной для управления маневрами:
с одной стороны, для вычисления заданной траектории по меньшей мере для одного предстоящего маневра, начинаемого автоматически или трактористом, на основе предварительно запрограммированных параметров, относящихся к характеристикам и физическим величинам трактора и прицепной машины или прицепных машин, к задачам и/или к условиям осуществляемой сельскохозяйственной работы и к обрабатываемому участку и к выбору работы комплекса, с применением алгоритма предсказания траекторий и алгоритма оптимизации заданных значений траекторий, и
с другой стороны, для автоматического исполнения указанного маневра или для содействия полуавтоматическому исполнению указанного маневра, управляя трактором напрямую или через его блок контроля и управления и определяя во время маневра отклонения между заранее определенной заданной траекторией и реальной или текущей оценочной траекторией с целью их автоматической коррекции или оповещения тракториста в полуавтоматическом режиме, возможно, после вычисления маневров коррекции траектории при помощи соответствующего алгоритма.
Объектом изобретения является также способ автоматического или полуавтоматического управления маневрами, в частности, разворотами шарнирного или многошарнирного комплекса, включающего в себя трактор и по меньшей мере одну буксируемую или полунавесную сельскохозяйственную машину, сцепленную напрямую с указанным трактором или с предыдущей машиной в комплексе при помощи по меньшей мере одного шарнирного соединения, а также систему управления и направления маневров, в частности, разворотов, содержащую по меньшей мере один блок вычисления и управления, встроенный в прицепную машину или одну из прицепных машин и связанный, с одной стороны, по меньшей мере с одним датчиком, выдающим в него текущие взаимные относительные положения двух компонентов каждой пары рабочих компонентов комплекса, соединенных между собой при помощи шарнирного соединения, с другой стороны, с блоком контроля и управления трактора и/или с интерфейсом связи, в частности, индикации и, возможно, управления для связи с трактористом и, наконец, по меньшей мере с одним средством параметризации или программирования, причем эти дополнительные функциональные компоненты тоже являются частью системы управления и направления маневров.
Способ характеризуется тем, что при помощи блока вычисления и управления рассматриваемой сельскохозяйственной машины, действующего как главный блок системы управления и направления маневров комплекса, и посредством исполнения программы, адаптированной для управления маневрами, вычисляют заданную траекторию по меньшей мере для одного предстоящего маневра, начинаемого автоматически или трактористом, на основе предварительно запрограммированных параметров, относящихся к соответствующим конструктивным, функциональным или размерным характеристикам трактора и прицепной машины или прицепных машин, к задачам и/или к условиям осуществляемой сельскохозяйственной работы и к обрабатываемому участку и к выбору работы комплекса, с применением алгоритма предсказания траекторий и алгоритма оптимизации заданных значений траекторий, и
затем автоматически исполняют указанный маневр или содействуют полуавтоматическому исполнению указанного маневра с управлением трактором напрямую или через его блок контроля и управления и с определением во время маневра отклонений между заранее определенной заданной траекторией и реальной или текущей оценочной траекторией с целью их автоматической коррекции или оповещения тракториста в полуавтоматическом режиме, возможно, после вычисления измерений коррекции траектории при помощи соответствующего алгоритма.
Изобретение будет более очевидно из нижеследующего описания предпочтительных вариантов выполнения, представленных в качестве не ограничительных примеров со ссылками на прилагаемые схематичные чертежи, на которых:
Фиг. 1А и 1В - схематичные виды сверху заявленного комплекса, содержащего соответственно три элемента (трактор + два рабочих компонента) и четыре элемента (трактор + три рабочих компонента) и оснащенного системой управления и направления маневров.
Фиг. 2 - общая блок-схема прохождения и обработки информации и команд в заявленной системе управления и направления маневров в зависимости от режима управления (вариант 1: полуавтоматическое управление, вариант 2: автоматическое управление).
Фиг. 3 - детальная блок-схема основных функциональных элементов, входящих в состав заявленной системы управления и направления маневров, и их взаимных обменов.
Фиг. 4 - функциональная блок-схема, иллюстрирующая возможные взаимодействия между алгоритмами, применяемыми главным блоком, и интерфейсы связи в рамках системы управления и направления маневров.
Фиг. 5 - блок-схема (Grafcet) основных этапов заявленного способа, соответствующая так называемому режиму «нормальной работы» системы.
Фиг. 6 - хронограмма исполнения маневра с коррекцией траектории с применением способа и системы в соответствии с изобретением.
На фиг. 1А и 1В и со ссылками, в частности, на фиг. 3 представлен комплекс 1, включающий в себя в качестве рабочих компонентов трактор 2 и по меньшей мере одну буксируемую или полунавесную сельскохозяйственную машину 3, 3', 3'', сцепленную непосредственно с указанным трактором или с предыдущей машиной 3, 3' в комплексе при помощи по меньшей мере одного шарнирного соединения 4, 4', 4''. Этот комплекс 1 содержит также систему управления и направления маневров, в частности, разворотов, содержащую по меньшей мере один блок 5, 5' вычисления и управления, встроенный в прицепную машину или одну из прицепных машин 3, 3', 3'' и связанный, с одной стороны, по меньшей мере с одним датчиком 6, 6', 6'', передающим в него текущие взаимные относительные положения двух компонентов 2, 3; 3, 3'; 3', 3'' каждой пары рабочих компонентов 3, 3', 3'' комплекса 1, соединенных между собой при помощи шарнирного соединения 4, 4', 4'', с другой стороны, с блоком 7 контроля и управления трактора 2 и/или с интерфейсом 8 связи, в частности, индикации и, возможно, управления для связи с трактористом и, наконец, по меньшей мере с одним средством 9 параметризации или программирования, причем эти дополнительные функциональные компоненты 6, 6', 6'', 7, 8, 9 (в том числе указанный по меньшей мере один датчик 6, 6', 6'', блок 7 и/или интерфейс 8 и указанное по меньшей мере одно средство 9 параметризации или программирования), с которыми связан вышеупомянутый блок 5, 5' вычисления и управления, тоже являются частью системы управления и направления маневров.
Интерфейс 8 связи, например, в виде сенсорного или аналогового экрана, предпочтительно установлен, в случае необходимости, с возможностью перемещения или разъемно в кабине трактора 2. Средство 9 параметризации и/или программирования установлено на машине 3, содержащей главный блок 5 комплекса 1, или может быть временно соединено с этим главным блоком. В альтернативном варианте это средство 9 параметризации и/или программирования, а также интерфейс 8 связи могут быть также продублированы на различных элементах комплекса.
Разумеется, линии связи между средствами 8 и 9 и трактором 2 и машиной 3 могут соответственно представлять собой линии проводной или беспроводной связи.
Согласно изобретению, блок 5, 5' вычисления и управления прицепной сельскохозяйственной машины 3 или одной из прицепных сельскохозяйственных машин 3', 3'' представляет собой главный блок системы управления и направления маневров и предпочтительно всего комплекса 1.
Он выполнен с возможностью и предназначен, под контролем программы, адаптированной для управления маневрами:
с одной стороны, для вычисления заданной траектории по меньшей мере для одного предстоящего маневра, начинаемого автоматически или трактористом, на основе предварительно запрограммированных параметров, относящихся к характеристикам и физическим величинам трактора 2 и прицепной машины или прицепных машин 3, 3', 3'', к задачам и/или к условиям осуществляемой сельскохозяйственной работы и к обрабатываемому участку и к выбору работы комплекса, с применением алгоритма предсказания траекторий и алгоритма оптимизации заданных значений траекторий, и
с другой стороны, для автоматического исполнения указанного маневра или для содействия полуавтоматическому исполнению указанного маневра с управлением трактором 2 напрямую или через его блок 7 контроля и управления и с определением во время маневра отклонений между заранее определенной заданной траекторией и реальной или текущей оценочной траекторией с целью их автоматической коррекции или оповещения тракториста в полуавтоматическом режиме, возможно, после вычисления маневров коррекции траектории при помощи соответствующего алгоритма.
Таким образом, изобретением предложен комплекс 1, выполненный с возможностью автоматического или полуавтоматического управления маневрами сельскохозяйственной машины или сельскохозяйственных машин 3, 3', 3'', входящих в его состав, причем независимо от трактора 2, тоже являющегося частью комплекса.
Как было указано выше, эта задача решается за счет того, что блок 5, 5' вычисления и управления сельскохозяйственной машины или сельскохозяйственных машин 3, 3', 3'' представляет собой главный блок комплекса 1 и что система управления и направления маневров комплекса 1 содержит программу, применяемую блоком 5, 5' для реализации вышеупомянутых функций/операций.
Следовательно, изобретение позволяет, в частности, с одной стороны, использовать сельскохозяйственные машины с разными тракторами и, с другой стороны, оптимизировать траектории, независимо от числа машин в комплексе.
Кроме того, изобретение имеет также следующие преимущества:
- повышение эффективности машины или машин за счет сокращения продолжительности маневра,
- облегчение работы оператора и снижение его усталости во время повторения монотонных операций, требующих большой осторожности и концентрации, когда их осуществляют вручную,
- возможность осуществления маневров на высокой скорости,
- уменьшение повреждения почвы и ее уплотнения во время повторяющихся маневров (например, повторяющихся разворотов на уровне краевых полос), в частности, за счет уменьшения проходимой длины или соблюдения углов поворота или складывания между прицепными элементами, способствующих хорошему качению машин,
- обеспечение точности маневра, независимо от внешних условий (ночное время, туман и т.д.).
В частности, что касается маневров, контролируемых или управляемых трактором 2, изобретение имеет основные преимущества по следующим соображениям:
- Большинство трактористов не имеют или не применяют систему автоматического разворота (сложный маневр).
- Рабочие орудия (а также соответствующие системы контроля) являются буксируемыми (или полунавесными) рабочими компонентами. Конструкторы этого оборудования (несущего активные рабочие орудия в ходе соответствующих сельскохозяйственных операций) могут лучше определять оптимальные рабочие условия соответствующей сельскохозяйственной операции и, следовательно, определять оптимальные параметры маневров, связанных с применением их оборудования.
- Прицепная или полунавесная машина 3, 3', 3'' будет контролировать с более высокой точностью и с более высокой скоростью свои собственные механизмы, запуск или остановку своих систем.
- Прицепное (или полунавесное) оборудование имеет больше вариантов конструкции и регулировочных параметров для осуществления различных требуемых технических операций. Операцию ввода данных необходимо осуществлять для каждой машины (что занимает много времени), если маневрами управляет электронная система трактора. Данные, связанные с трактором, являются гораздо менее многочисленными и менее разнообразными, чем данные прицепных машин, следовательно, ввод соответствующих данных занимает меньше времени и является более простым, когда маневрами управляет блок 5, 5' одной из прицепных или полунавесных машин.
Предпочтительно система управления и направления маневров и, следовательно, комплекс 1 может также содержать по меньшей мере один дополнительный датчик 10 на уровне трактора 2, выполненный с возможностью и предназначенный для передачи информации об угле поворота управляемых колес 2', о скорости вращения ведущих колес 2'', об абсолютной скорости движения, о положении по высоте его трехточечной сцепки и/или о скорости вращения его механизма отбора мощности.
Хотя комплекс 1 может представлять собой элементарный комплекс (не показан), включающий в себя трактор и единственную прицепную машину 3, преимущества изобретения более всего проявляются, когда комплекс содержит, как показано на фиг. 1А и 1В, по меньшей мере две сельскохозяйственные машины 3, 3', прицепленные последовательно одна за другой к трактору 2, при этом первая машина 3 из данной последовательности соединена с трактором 2 напрямую и является буксируемой, навесной или полунавесной, и вторая машина 3', а также возможные следующие машины 3'' шарнирно соединены с машиной 3, 3', соответственно находящейся перед ними.
Кроме того, по меньшей мере один датчик 6, 6', 6'', выдающий сигнал указания взаимного относительного положения двух рабочих компонентов 2, 3, 3', 3'', соединенных между собой через шарнирное соединение 4, 4', 4'', подсоединен или установлен на уровне шарнирного соединения или каждого шарнирного соединения 4, 4', 4''.
Предпочтительно шарнирное соединение или каждое шарнирное соединение 4, 4', 4'' имеет по меньшей мере одну степень свободы в виде возможности поворота вокруг вертикальной и/или перпендикулярной к земле оси поворота, и датчик, некоторые датчики или каждый датчик 6, 6', 6'', связанный(ые) с шарнирным соединением или с шарнирными соединениями 4, 4', 4'', выдает(ют) сигнал, указывающий на конфигурацию соответствующего(их) шарнирного соединения или шарнирных соединений 4, 4', 4'' вокруг соответствующей оси вращения.
Действительно, именно ориентация и изменение ориентации различных прицепных машин 3, 3', 3'' в горизонтальной плоскости или плоскости земли определяют траекторию движения комплекса 1 и, следовательно, обработку почвы и/или растений, встречающихся на пути следования, например, на уровне краевых полос в рамках маневров разворотов.
Когда в качестве функциональных компонентов комплекс 1 содержит две машины (3 и 3' - фиг. 1А) или три машины (3, 3' и 3'' - фиг. 1В), можно рассмотреть несколько встречающихся ситуаций:
- либо только одна из указанных машин (предпочтительно первая в комплексе 1, напрямую соединенная с трактором 2) содержит блок 5 вычисления и управления, который в этом случае выполняет функцию главного блока системы управления и направления маневров,
- либо несколько из указанных машин содержат блоки 5, 5' вычисления и управления, и в этом случае предпочтительно блок 5 первой машины 3 комплекса берет на себя роль главного блока (при этом другой или другие блоки 5' могут выполнять свою обычную функцию на уровне машины 3', которая (его)их содержит, и, разумеется, могут вести диалог с главным блоком 5).
Для обеспечения определения географического местонахождения комплекса 1 или по меньшей мере некоторых из его составных компонентов на обрабатываемом поле и, следовательно, для обеспечения полностью автоматического управления маневрами по меньшей мере одна из прицепных сельскохозяйственных машин 3, 3', 3'' оснащена антенной 11, 11' геолокализации, данные из которой поступают в главный блок 5 вычисления и управления и обрабатываются этим блоком в автоматическом режиме работы и/или выводятся на интерфейс 8 связи.
Предпочтительно главный блок 5 вычисления и управления, а также, в случае необходимости, антенна 11 геолокализации установлены на первой сельскохозяйственной машине 3, напрямую соединенной с трактором, когда она является буксируемой или полунавесной.
Как показано на фиг. 1А, 1В и 3 прилагаемых чертежей, для обеспечения автоматического управления маневрами главный блок 5 соединен с силовым интерфейсом 12 управления трактора или с его блоком 7 контроля и управления через шину 13 связи, при этом шина 13 обеспечивает также передачу данных между этим главным блоком 5 и другими функциональными компонентами 8, 10, 11' системы управления и направления, которыми может быть оснащен трактор 2.
В практическом примере выполнения шина 13 связи может быть шиной, известной под названием ISOBUS (зарегистрированный товарный знак), и управление трактором 2, оборудованным блоком 7 (TECU - Электронный блок контроля трактора) может быть основано на технологии управления, известной под названием TIM (Tractor Implement Management - Инструментальное управление трактором).
Можно отметить, что составными функциональными элементами системы управления и направления маневров являются, за исключением, возможно, датчиков 6, 6', 6'', элементами, уже присутствующими на тракторе 2 или машинах 3, 3', 3'', образующих комплекс 1, при этом возможности и эффективность указанной системы обусловлены уровнем ее оснащения (присутствие или отсутствие блока 7 на уровне трактора 2; присутствие или отсутствие антенн 11, 11' геолокализации; число и тип датчиков, присутствующих на машинах и тракторе).
В соответствии с дополнительным признаком изобретения интерфейс 8 дополнительно содержит средство выбора режима работы среди работы с полностью автоматическим управлением, с полуавтоматическим управлением или с ручным управлением.
Объектом изобретения является также способ автоматического или полуавтоматического управления маневрами, в частности, разворотами шарнирного или многошарнирного комплекса 1, включающего в себя трактор 2 и по меньшей мере одну буксируемую или полунавесную сельскохозяйственную машину 3, 3', 3'', сцепленную напрямую с указанным трактором или с предыдущей машиной в комплексе при помощи по меньшей мере одного шарнирного соединения 4, 4', 4'', а также систему управления и направления маневров, в частности, разворотов, содержащую по меньшей мере один блок 5, 5' вычисления и управления, встроенный в прицепную машину или одну из прицепных машин 3, 3', 3'' и связанный, с одной стороны, по меньшей мере с одним датчиком 6, 6', 6'', передающим в него текущие взаимные относительные положения двух компонентов каждой пары рабочих компонентов 2, 3, 3', 3'' комплекса 1, соединенных между собой при помощи шарнирного соединения, с другой стороны, с блоком 7 контроля и управления трактора 2 и/или с интерфейсом 8 связи, в частности, индикации и, возможно, управления для связи с трактористом и, наконец, по меньшей мере с одним средством 9 параметризации или программирования, причем эти дополнительные функциональные компоненты тоже являются частью системы управления и направления маневров.
Согласно изобретению, в рамках указанного способа, осуществляемого при помощи блока 5 вычисления и управления рассматриваемой сельскохозяйственной машины 3, действующего как главный блок системы управления и направления маневров, вычисляют заданную траекторию по меньшей мере для одного предстоящего маневра, начинаемого автоматически или трактористом, на основе предварительно запрограммированных параметров, относящихся к надлежащим конструктивным, функциональным и размерным характеристикам трактора 2 и прицепной машины или прицепных машин 3, 3', 3'', к задачам и/или к условиям осуществляемой сельскохозяйственной работы и к обрабатываемому участку и к выбору работы комплекса 1, с применением алгоритма предсказания траекторий и алгоритма оптимизации заданных значений траекторий,
затем автоматически осуществляют указанный маневр или содействие полуавтоматическому исполнению указанного маневра, причем, в случае необходимости, многократно, с управлением трактором 2 напрямую или через его блок 7 контроля и управления и с определением во время маневра отклонений между заранее определенной заданной траекторией и реальной или текущей оценочной траекторией с целью их автоматической коррекции или оповещения тракториста в полуавтоматическом режиме, возможно, после вычисления измерений коррекции траектории при помощи соответствующего алгоритма.
Разумеется, комплекс 1 и его составные элементы соответствуют описанным выше комплексу и элементам.
Согласно первому возможному варианту осуществления способа, в режиме полуавтоматического управления маневром для оператора, находящегося в тракторе 2, и предпочтительно при помощи устройства индикации, являющегося частью интерфейса 8 связи, выводят предписанную заданную траекторию, в случае необходимости, скорректированную или обновленную в ходе маневра в зависимости от положения трактора 8, сельскохозяйственной машины 3, 3', 3'' и/или комплекса 1, и разрешают оператору осуществить маневр в пределах условий обстановки и безопасности, а также физических, кинематических и механических возможностей комплекса 1, при этом блок 5 вычисления и управления рассматриваемой сельскохозяйственной машины 3 предоставляет помощь при принятии решения в виде рекомендованной траектории и, возможно, более или менее подробных указаний для осуществления действий с целью управления маневром и/или коррекции траектории.
Согласно второму возможному варианту осуществления изобретения, в автоматическом режиме управления маневром при помощи главного блока 5, в рамках способа учитывают данные, поступающие по меньшей мере от одной антенны 11, 11' геолокализации, которой оснащен трактор 2 и другая сельскохозяйственная машина или по меньшей мере одна из прицепных машин 3, 3', 3''.
В рамках подготовительной фазы перед обработкой поля в рамках способа после формирования комплекса 1 с целью осуществления простой или сложной работы производят параметризацию алгоритма вычисления траекторий, вводя в главный блок 5 различные функциональные, конструктивные и размерные характеристики трактора и сельскохозяйственной машины или других сельскохозяйственных машин 3', 3'' данного комплекса 1.
В соответствии с кинематическими характеристиками механизированного сельскохозяйственного комплекса 1 и соединений между различными элементами 2, 3, 3', 3'' предпочтительно на уровне каждого шарнирного соединения 4, 4', 4'' учитывают по меньшей мере одну степень свободы в виде возможности поворота вокруг вертикальной и/или перпендикулярной к земле оси вращения, при этом датчик, некоторые датчики или каждый датчик 6, 6', 6'', связанный(ые) с шарнирным соединением или шарнирными соединениями 4, 4', 4'', выдает сигнал, указывающий на конфигурацию соответствующего(их) шарнирного(ых) соединения(ий) 4, 4', 4'' вокруг соответствующей оси вращения.
Предпочтительно во время фазы параметризации алгоритма вычислений траекторий используют следующие характеристики и физические параметры:
- максимальный угол поворота трактора 2,
- максимальные значения ширины компонентов 2, 3, 3', 3'' комплекса 1,
- требуемая скорость движения во время маневра,
- максимальная угловая скорость поворота управляемых колес трактора 2,
- максимальные углы складывания или поворота между компонентами 2, 3, 3', 3'' комплекса,
- расстояние между задним мостом компонента комплекса 1 и точкой сцепки связанного с ним следующего компонента,
- расстояние между задним мостом прицепного компонента и его точкой сцепки с предыдущим компонентом,
- базы компонентов кинематической системы, образованной комплексом 1,
- направление поворота (правое или левое).
Аналогично можно производить параметризацию алгоритма оптимизации траектории, ставя перед собой необходимые задачи оптимизации, например, такие как минимизация времени работы, минимизация расстояния, проходимого одним из компонентов 2, 3, 3', 3'' комплекса 1 во время маневра, и/или минимизация по меньшей мере одного геометрического размера, характеризующего пространство маневра, например, такого как ширина краевой полосы или расстояние, проходимое трактором в случае разворота.
Согласно предпочтительному применению заявленного способа, в его рамках можно производить параметризацию алгоритма оптимизации траектории в случае управления разворотами путем указания требований к исполнению, например, таких как задание точки входа и/или точки выхода в зоне обработки почвы или культуры или задание максимальной допустимой ширины краевой полосы, соответствующей определенному кратному, например, 2 или 3, рабочей ширины самой широкой сельскохозяйственной машины 3, 3', 3'' комплекса 1.
Согласно первому варианту осуществления, способ состоит в том, чтобы во время маневра, контролируемого по вычисленной и оптимизированной заданной траектории, учитывать данные, выдаваемые различными датчиками 6, 6', 10, установленными на тракторе 2 и/или сельскохозяйственной(ых) машине(ах) 3, 3', 3'' и/или связанными с различными шарнирными соединениями 4, 4', 4'' между компонентами 2, 3, 3', 3'' комплекса 1.
Согласно второму варианту осуществления, альтернативному или дополнительному к вышеупомянутому первому варианту, в рамках способа во время контролируемого исполнения маневра в соответствии с вычисленной и оптимизированной заданной траекторией учитывают данные, выдаваемые системой геолокализации, по меньшей мере одна соответствующая антенна 11, 11' которой установлена на сельскохозяйственной машине 3, содержащей главный блок 5, на другой сельскохозяйственной машине 3', 3'' комплекса 1 или на тракторе 2, и, в случае необходимости, определяют отклонения с предписанной заданной траекторией и отображают их и даже, в случае необходимости, вычисляют, и указывают оператору компенсационные меры, и/или корректируют их автоматически.
Когда трактор 2 оснащен блоком 7, главный блок 5 направляет свои команды в этот блок для исполнения маневра.
Если трактор 2 не имеет блока 7 или если этот блок не может или не должен быть задействован для исполнения маневра, предусмотрено осуществление данного маневра под контролем главного блока 5 путем передачи команд из последнего в силовой интерфейс 12 управления трактора 2 для управления, в частности, системами поворота, ускорения и торможения указанного трактора 2.
Таким образом, благодаря изобретению, можно:
- предсказывать траектории, оптимизированные по времени пути, по проходимому расстоянию или по другому геометрическому критерию, компонентов комплекса трактор-машины (содержащему буксируемые или полунавесные сельскохозяйственные машины) в ходе операций разворота или в ходе других повторяющихся маневров,
- управлять трактором полуавтоматически или автоматически, чтобы следовать заранее определенной оптимизированной траектории с использованием системы GPS или аналогичного средства.
В качестве иллюстрации изобретения ниже со ссылками на прилагаемые фигуры следует описание практического не ограничительного примера осуществления.
Можно напомнить, что основными техническими моментами, которые в комбинации образуют предпочтительный вариант осуществления изобретения, являются следующие пункты 1-4:
1. Использование математической модели вычисления и моделирования траекторий (обозначаемой также термином «алгоритм предсказания траекторий, адаптированный для сельскохозяйственных операций»), которую предпочтительно параметрируют с учетом:
- Физических величин, относящихся к трактору и к связанным с ним сельскохозяйственным машинам (например, до трех машин, сцепленных друг за другом и буксируемых трактором).
- Условий работы, связанных с данной сельскохозяйственной операцией.
2. Использование математической модели оптимизации траекторий (обозначаемой также термином «алгоритм оптимизации или алгоритм вычисления заданных траекторий»), которую предпочтительно параметрируют с учетом:
- Физических величин, относящихся к трактору и к связанным с ним сельскохозяйственным машинам (например, до трех машин, сцепленных друг за другом и буксируемых трактором).
- Условий задач, связанных с данной сельскохозяйственной операцией. В отсутствие другого указания со стороны оператора в зависимости от осуществляемого маневра можно применять стандартный вариант оптимизации. Среди возможных условий задач можно указать выбор рабочего компонента комплекса трактор-машины, траекторию которого необходимо оптимизировать в первую очередь.
- Выбора работы оператором. В отсутствие другого указания со стороны оператора в зависимости от осуществляемого маневра можно применять стандартный вариант оптимизации.
Каждая вычисленная траектория, которую необходимо соблюдать во время маневра, называется заданной траекторией.
Например, алгоритм оптимизации может преследовать следующие цели отдельно или в комбинации:
- Минимизировать время, затрачиваемое в ходе маневра.
- Минимизировать расстояние, проходимое одним из компонентов комплекса трактор-машины во время маневра.
- Минимизировать один из геометрических размеров, характеризующих пространство маневра (такой как ширина краевой полосы).
Эту оптимизацию можно осуществлять с соблюдением следующих условий:
- например, соблюдая точку входа и/или точку выхода в зоне обработки почвы или культуры, и/или
- вписывая маневр в краевую полосу, ширина которой является кратной рабочей ширине самой широкой машины из комплекса.
3. Полуавтоматический или автоматический контроль траектории соответствующих машин во время повторяющихся маневров (таких как развороты) и автоматическая компенсация (при помощи алгоритма управления и соответствующей электромеханической системы) или компенсация под наблюдением человека наблюдаемых или оцениваемых отклонений между установленными заданными траекториями и реальными траекториями машин.
В случае полуавтоматического режима работы под наблюдением человека можно применять несколько технологических уровней. На наиболее простом уровне определенный элемент информирует оператора о предназначенных для соблюдения заданных траекториях (или об одной или нескольких напрямую связанных с ними физических величинах, таких как значения углов складывания или поворота на шарнирных соединениях между двумя сцепленными элементами или значения углов поворота управляемых колес). Это соответствует работе типа «Мониторинг» (отслеживание), и оператор осуществляет необходимые операции. На более высоком уровне содействия оператор тоже может располагать данными об отклонении между заданными траекториями (которые можно оценивать или измерять) и реально проходимыми траекториями (или об одной или нескольких связанных с ними физических величинах). Эти данные позволяют построить одну или несколько переменных отклонения, которые оператор должен минимизировать вручную, производя необходимые изменения направления. Блок управления системы, а именно блок 5 может предложить оператору соответствующие стратегии принятия решения через имеющийся в распоряжении диалоговый интерфейс 8 «человек-машина». Этот полуавтоматический режим работы соответствует работе типа «содействие вождению и принятию решения».
В случае автоматического режима работы главный блок 5 сам определяет необходимые корректирующие действия, и на основе алгоритма управления главный блок 5 берет на себя контроль органов, необходимых для осуществления этих действий. Из соображений безопасности оператор может опять перейти на ручной контроль комплекса трактор-машины.
4. Блок 5 вычисления и управления сельскохозяйственной машиной или одной из сельскохозяйственных машин 3, 3', 3'' (буксируемых или полунавесных) управляет необходимой технической операцией или операциями (обработка почвы, уход за культурами, сбор урожая, …) и управляет полуавтоматическим или автоматическим осуществлением необходимых маневров.
В рамках полуавтоматического режима работы предусмотрено следующее:
- блок 5 одной из машин 3, прицепленной к трактору 2 (например, сеялки), или полунавесной машины 3, соединенной с трактором 2, производит вычисления, необходимые для определения траекторий, которым необходимо следовать, и имеет интерфейс 8 связи с трактористом,
- все рассматриваемые машины (включая трактор 2) содержат датчики и элементы передачи соответствующих данных (через электронную связь, например, связь "ISOBUS" или через беспроводную связь) в главный блок 5, отвечающий за управление операциями разворота.
В рамках автоматического режима работы предусмотрено следующее:
- блок 5, 5', 5'' одной из машин 3, 3', 3'', прицепленной к трактору 2 (например, сеялки), или полунавесной машины 3, соединенной с трактором 2, производит вычисления, необходимые для определения траекторий, которым необходимо следовать, и имеет интерфейс 8 связи с трактористом,
- все рассматриваемые машины 3, 3', 3'' (включая трактор 2) содержат датчики и элементы передачи соответствующих данных (через электронную связь, например, связь "ISOBUS" или через беспроводную связь) в главный блок 5, отвечающий за управление операциями разворота,
- блок 5 одной из машин 3, прицепленной к трактору 2 (например, сеялки), или полунавесной машины 3, соединенной с трактором 2, управляет трактором во время повторяющихся маневров (например, во время операций разворота). Машина 3, которая управляет трактором 2 во время этих маневров, должна, таким образом, контролировать необходимые органы в рамках соответствующего технического устройства, например, устройства типа "Tractor Implement Management". Она делает это через электронную связь (например, связь "ISOBUS") или через беспроводную связь с целью осуществления операций, предусмотренных алгоритмом управления.
В частности, как показано символично по меньшей мере частично на фиг. 1А-4, система управления и направления маневров содержит:
- Алгоритм вычисления траектории, позволяющий предсказать траектории элементов комплекса трактор-машины (вычислительное устройство, позволяющее определять траектории комплекса).
- Алгоритм оптимизации траекторий (определение заданных траекторий, выбранных в зависимости от определенной задачи).
- Алгоритм вычисления поправок траекторий, вносимых во время маневра, называемый также алгоритмом управления (является факультативным при работы в полуавтоматическом режиме).
- Программу управления, функцией которой является управление отношениями между алгоритмами, обеспечение нормального обмена данными на уровне входного и выходного интерфейсов главного блока 5 вычисления и управления и обеспечение нормальной реализации ожидаемых функций на уровне системы (запуск или остановка цикла управления маневром, режим экстренной остановки или режим аварийной работы и т.д.).
- Главный блок 5 вычисления и управления (компьютерное устройство), который запрограммирован, в частности, для осуществления операций, необходимых для вышеупомянутых алгоритмов, обрабатывает поток входящих и выходящих данных. Он находится на одной из буксируемых машин или на полунавесной машине.
- По меньшей мере один интерфейс 9 программирования главного блока 5 вычисления и управления. В случае необходимости, один из этих интерфейсов может быть вынесен на уровень трактора.
- По меньшей мере один интерфейс 8 связи с устройством индикации, предназначенный для оповещения оператора и облегчения диалога человек-машина. Предпочтительно одно из этих устройств индикации вынесено на уровень трактора.
- Интерфейс, позволяющий главному блоку 5 вычисления и управления получать данные от датчиков 6, 6', 6'', 10, установленных на тракторе или машинах комплекса.
- Интерфейс 12, обеспечивающий осуществление контроля необходимых силовых органов главным блоком 5 вычисления и управления в случае автоматического режима работы.
Оператор параметрирует алгоритм вычисления траекторий с физическими величинами, связанными с используемой техникой и с осуществляемыми сельскохозяйственными операциями. Значения параметров, которые должен вводить оператор, были указаны выше.
Оператор параметрирует алгоритм оптимизации траектории с условиями задачи, задаваемыми оператором (например, максимальная ширина краевой полосы), и с выбором оператора относительно способа оптимизации (точность, выбор алгоритма, исходная точка оптимизации, …).
Оператор параметрирует также алгоритм вычисления поправок траекторий в зависимости от применяемого режима работы (полуавтоматический или автоматический режим), в частности:
- чтобы производить соответствующие вычисления поправок траектории (полуавтоматический или автоматический режим). Можно предложить параметризацию по умолчанию.
- чтобы обеспечить хорошее отображение заданных значений и данных, предназначенных для оператора (в полуавтоматическом режиме).
- чтобы обеспечивать хорошее отображение данных, предназначенных для оператора (в автоматическом режиме) и чтобы параметрировать алгоритм коррекции траектории (в автоматическом режиме).
Можно напомнить, что алгоритм коррекции траектории является факультативным в случае устройства полуавтоматического управления.
Оператор также параметрирует общую программу управления, чтобы обеспечить хорошую работу входных и выходного интерфейсов вычислительного устройства и, в целом, чтобы обеспечить хорошее выполнение функций, ожидаемых на уровне системы управления и направления маневров.
Возможное протекание цикла управления показано на фиг. 5 (в виде Grafcet).
Контроль траектории комплекса трактор-машины можно осуществлять в полуавтоматическом режиме или в автоматическом режиме.
Во всех случаях цикл управления и контроля маневра в соответствии с изобретением протекает следующим образом (см. фиг. 5):
0) Запуск. Запуск происходит, если соблюдены первоначальные условия работы и оператор запрашивает запуск системы управления и направления маневров. Запуск соответствует переходу между этапом 0 и этапом 1.
1) Параметризация системы. Можно сохранить в памяти последовательность предыдущих параметризаций и воспроизводить их для системы с целью выигрыша во времени.
2) Определение заданных траекторий. Алгоритм вычисления траекторий проверяет модели траекторий в соответствии с командами алгоритма оптимизации траектории. При достижении критериев задачи определяют и сохраняют в памяти траекторию или траектории. Заданные траектории можно определить по переменным, связанным с относительным положением между шарнирно соединенными элементами (угол складывания и т.д.). Заданные значения траекторий могут включать в себя сведения о скорости движения тракторов. Полученные траектории можно сохранить в памяти и извлекать для дальнейшего использования, не прибегая к фазе вычисления.
3) Ожидание начала маневра. Во время этапа ожидания начала маневра система управления и направления не осуществляет направления комплекса трактор-орудия. Начало цикла направления маневра заявленной системой запускает оператор или факультативная система локализации.
4) Фаза направления. После начала маневра и активации управления система управления и направления является активной и управляет трактором в полуавтоматическом или автоматическом режиме, чтобы следовать заранее определенной оптимизированной траектории с использованием или без использования системы GPS. Устройство индикации может оповещать оператора о протекании операций, контролируемых или вычисляемых системой управления и направления. Согласно факультативному признаку, в ходе маневра предусмотрены перерасчет новых заданных траекторий в случае непредвиденных обстоятельств или коррекция параметризации алгоритма коррекции траектории (чтобы исправить существенные отклонения траектории).
Переход 4)-5) Деактивация этапа направления. Систему управления и направления можно деактивировать вручную в любой момент, или она может выключиться автоматически после завершения маневра. Оператор может, например, деактивировать систему в конце траектории, чтобы скорректировать вручную возможное отклонение. После завершения маневра программа управления возвращается на этап ожидания до следующего маневра.
5) Остановка устройства управления. Оператор может прервать работу системы полуавтоматического или автоматического управления и направления в любой момент (в частности, когда работа на поле закончена). Следовательно, каждый этап должен быть связан с этим этапом остановки (на фиг. 5 не показан). Система останавливается в нормальных условиях безопасности.
Блок-схема Grafcet, описанная в качестве примера, соответствует так называемому «нормальному» варианту работы системы. В этой блок-схеме Grafcet нормальной работы не представлены варианты экстренной остановки или варианты работы в аварийной ситуации (как их называют обычно при автоматизации с использованием инструментов Grafcet), но специалист может легко вывести их из представленной схемы.
В рамках исполнения рабочих фаз способа определение заданных траекторий происходит после фазы параметризации. В возможном варианте осуществления изобретения ее можно производить в ходе маневра в случае непредвиденного события.
Алгоритм вычисления траекторий следует командам, передаваемым алгоритмом оптимизации траектории, для создания первой модели траектории (исходные условия вычисления), затем инкрементирует модели (проверяет новые траектории, которые могут дать лучшие результаты) или прекращает вычисление или последовательность вычислений, когда найден удовлетворительный результат. Этот результат становится заданной траекторией (или заданными траекториями), которую необходимо будет соблюдать. Полученные траектории можно сохранить в памяти и извлекать для дальнейшего использования, чтобы избежать фазы вычисления.
При помощи модели авторы изобретения смогли моделировать развороты (или другие маневры изменения направления) для трактора и нескольких прицепленных машин с достаточной точностью при условии, что оператор корректирует «отклонение», наблюдаемое в конце хода. Причина наблюдаемого отклонения связана с сопротивлением почвы, которая действует реактивным усилием на управляемые колеса, которые заглубляются в почву. Используемая модель была основана на фундаментальных уравнениях, раскрытых в публикации Zakin J. 1967, "Applied theory of the articulated lorry", Monograph // Закин Я.Х. Прикладная теория движения автопоезда. - М. Транспорт, 1967 - 252 с., и адаптирована для сельскохозяйственных машин. Модель учитывает также взаимодействия между почвой и колесами машин, а также механические взаимодействия на уровне шарнирных соединений между машинами (трения). Эта модель, указанная в качестве примера, была использована в варианте выполнения, подробно описанном ниже, в качестве математического механизма алгоритма вычисления траектории.
С геометрической точки зрения для любого элемента многошарнирного комплекса типа сельскохозяйственного комплекса угол поворота является углом между двумя осями, связывающими моментальный центр вращения и центры переднего и заднего мостов (см. фиг. 7):
где:
Ln - база элемента n,
γn - угол поворота элемента n,
Rn - радиус поворота элемента n,
On - центр вращения элемента n в данный момент,
On+1' - точка шарнирного соединения между элементом n и элементом n+1.
В предыдущей формуле: n=2 для трактора 2, n=3 для первого прицепного элемента 3, n=4 для второго прицепного элемента 3' и т.д. Угловая скорость ω2 поворота управляемых колес 2' трактора будет определять поведение комплекса трактор-первая прицепная машина, затем, как следствие, следующих машин. Это действие характеризуется величиной kn (называемой параметром режима разворота), которая характеризует полученное изменение кривизны траектории, приведенное к расстоянию, пройденному на кривой поворота, и равна (согласно публикации Закина Я.Х. - 1967):
где: Sn - расстояние, пройденное по данной траектории.
В случае трактора, если считать, что движение происходит по идеальной плоской поверхности без проскальзывания или влияния почвы на направление движения, то можно считать (согласно публикации Закина Я.Х. - 1967), что:
В рамках настоящего изобретения его авторы развили уравнения и разработали специальный метод, позволяющий учитывать неидеальные случаи, при которых на траектории сельскохозяйственных машин влияют их взаимодействия с почвой. В этом случае угол поворота γ2 колес трактора можно заменить скорректированным (или «реальным») углом поворота γ2c, который учитывает взаимодействия с почвой.
Если трактор оснащен системой геолокализации, то в вышеуказанном уравнении можно непосредственно заменить γ2 на γ2c, так как γ2с можно измерить посредством геолокализации. В отсутствие системы геолокализации определяют математическое правило калибровки между γ2, ω2 и γ2c типа:

где: А, а, В, b и С соответствуют параметрам коррекции.
Во всех случаях значения γ2c призваны заменить значения γ2 в уравнениях моделирования траектории, если взаимодействие с почвой считается значительными.
Действительно, такое правило калибровки позволяет приблизиться к результатам, полученным заявителем и авторами изобретения в ходе испытаний на поле. Оно позволяет также получить ответ для случаев с учетом явлений проскальзывания (или пробуксовки) на почве. В случае идеального сцепления (без бокового заноса или продольной пробуксовки) получаем a=b=1, и только сопротивление земли с каждой стороны управляемых колес трактора (которые частично заглубляются в почву) противодействует, с одной стороны, повороту (прямое влияние на γ2) и, с другой стороны, боковому перемещению управляемых колес при вращении руля (прямое влияние на ω2). Это сопротивление земли с каждой стороны управляемых колес создает угол отклонения (γ2c-γ2). Параметризация уравнения происходит путем эмпирической коррекции (метод последовательных приближений), в соответствии с базой данных или согласно методу калибровки во время испытания с типовым маневром.
Поведение буксируемых элементов обусловлено изменением направления силы натяжения, которая действует на соответствующую точку сцепки. Аналогично, траектория элемента n+1 будет производной от траектории предыдущего элемента. Дифференциальное уравнение угла складывания между двумя элементами можно вывести из вышеупомянутой публикации Закина Я.Х. (1967):
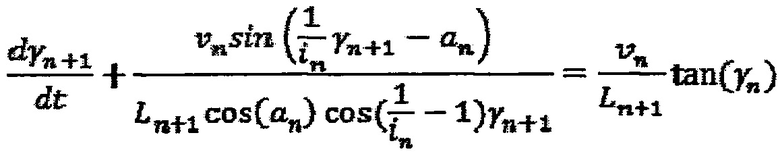
В этом уравнении:
a n - угол, образованный между осью, проходящей через кинематический центр элемента-трактора n с моментальным центром вращения буксируемого элемента n+1, и осью, связывающей точку сцепки с этим моментальным центром вращения буксируемого элемента n+1,
in - прямое отношение механической связи сцепленных элементов n и n+1.
Отношение механической связи in позволяет учитывать несовершенство точек шарнирного соединения между сцепленными элементами (трения, …) при передаче движения и изменении направления. Авторы изобретения разработали уравнения и метод, позволяющие учитывать неидеальные случаи в выражении in (или использовать другие параметры, не раскрытые в публикации Закина Я.Х, 1967), когда на траектории сельскохозяйственных машин влияют трение или механическое сопротивление, которые могут существовать на уровне точек шарнирного соединения между сцепленными элементами.
Механические взаимодействия, которые происходят на уровне шарнирных соединений между машинами (трения, …), можно учитывать благодаря математической функции, которая меняет, например, значение in на inc (скорректированное или «реальное» отношение механической связи). Следовательно, можно использовать общее правило (которое упрощается в простых случаях) для оценки inc, то есть:
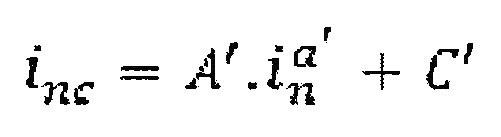
где: А', а' и C соответствуют цифровым параметрам коррекции. При идеальном шарнирном соединении получаем: А'=а'=С'=1.
На поведение элемента n+1 может также влиять поведение колес предыдущего элемента на почве, даже если он не является трактором (согласно тому же принципу, который был описан выше для колес трактора). Действительно, направление натяжения может отличаться от направления, задаваемого углом γn+1, когда может быть обнаружен угол проскальзывания. Даже если колеса элемента n не являются управляемыми, земля с каждой стороны колес элемента n может оказывать сопротивление повороту. В уравнениях можно заменить γn+1 на γn+1c, согласно математическому правилу калибровки, аналогичному правилу для вышеуказанного случая трактора:

где: An, an, Bn, bn и C соответствуют цифровым параметрам коррекции. Если элемент n не имеет управляемых колес, В равно нулю.
Эти указанные выше уравнения и правила позволяют строить модели траектории для трактора и прицепных элементов даже для сложных случаев. В простых случаях нет необходимости заменять значения углов поворота, складывания или отношение механической связи исправленными значениями.
В нижеследующей таблице приведен пример разработанной модели (вычисления угла складывания между трактором 2 и первым прицепным рабочим компонентом 3). В рамках этого примера трактор может описывать любую траекторию поворота. Частью этих траекторий является и разворот, называемый «подковообразным». На фиг. 8А-8С представлены примеры разворотов, применяемых в конце поля, которые можно моделировать (фиг. 8А: разворот в виде пересекающейся петли/фиг. 8В: полукруговой разворот/фиг. 8С: «подковообразный» или извилистый разворот). Например, чтобы осуществить подковообразный разворот, трактор 2 сначала следует по прямолинейной траектории, затем проходит переходную фазу входа, затем фазу кругового движения с постоянным углом поворота, затем переходную фазу выхода, чтобы опять занять прямолинейную траекторию, В представленном случае взаимодействие с почвой или механическое трение в шарнирных соединениях на первом этапе можно считать несущественным.
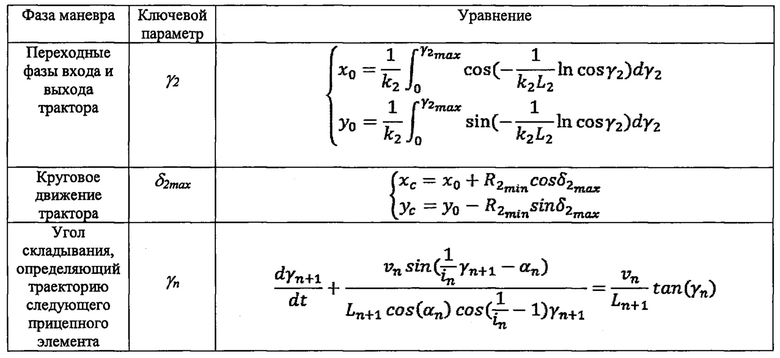
В этой таблице упомянуты следующие параметры и переменные:
δ2max - угол отклонения трактора относительно первоначального направления;
k2 - коэффициент режима, связанный с трактором;
L2, Ln+1 - значения базы элемента-трактора и прицепного элемента;
γ2 - угол поворота трактора;
γn, γn+1, - углы складывания двух последовательных сцепленных элементов;
x0, y0 - координаты траектории трактора;
xc, γс - координаты центра круговой траектории;
R2min - радиус поворота;
a n - угол, образованный осью, связывающей кинематический центр элемента-трактора с моментальным центром вращения, и осью, связывающей мост сцепки с этим центром вращения;
in - прямое отношение механической связи элементов, описанное в публикации Закина Я.Х. (1967).
В случае необходимости, взаимодействие с почвой можно затем ввести в модель для определения траектории, получаемой при помощи математической функции, которая позволяет определять последствия взаимодействий между почвой и шинами (в частности, связанных с углом поворота колес). В этом случае угол поворота γ2 колес трактора заменяют скорректированным (или «реальным») углом поворота γ2c, который учитывает взаимодействие с почвой, как было указано выше. Механическое взаимодействие на уровне шарнирных соединений между машинами (трения, …) можно учитывать при помощи математической функции, которая заменяет, например, значение in на inc (скорректированное или «реальное» отношение механической связи) или которая заменяет, например, значение угла складывания γn на скорректированный (или реальный) угол складывания γnc. Эти изменения производят, как было описано выше.
На этой стадии располагают средством для моделирования траектории трактора и его прицепных элементов.
Алгоритм оптимизации траекторий может работать по разным принципам. Во-первых, можно работать систематически в ограниченной экспериментальной области (с пределами), инкрементируя на заранее определенный шаг каждое последующее вычисление. При испытании по одному размеру это означает, например, тестирование скорости поворота от 0,01 рад/с до 1 рад/с с шагом 0,01 рад/с. Среди вычисляемых траекторий заданная траектория (или заданные траектории, если речь идет о траекториях всех машин 3, 3', 3'' и трактора 2), определенная при помощи алгоритма оптимизации, будет такой, которая максимально отвечает задаче, поставленной оператором (например, минимизация расстояния, проходимого во время маневра).
На уровне алгоритма оптимизации можно сократить количество вычислений, используя «прямой метод оптимизации». Под прямым методом оптимизации следует понимать последовательность проб и ошибок, преследующую какой-либо результат, сводя при этом к минимуму количество производимых испытаний. Эти методы известны, например, из следующих публикаций: Fiat, О. (2007), «Использование и развитие симплекс-метода - Новые процедуры оптимизации экспериментального пути», Докторская диссертация, Университет Лиможа, 188 с.; Porte, С. (2002), «Прямые методы оптимизации - Методы с одной переменной и симплекс-методы», Инженерные технологии, Р228, 1-18; Porte, С. (2002), «Прямые методы оптимизации - Методы, производные от симплекс-метода - Метод Нелдера и Мида (Modified Simplex)», Инженерные технологии, Р229, 1-15.
Эти методы работают как при исследовании с одной переменной, так и для исследований с многими переменными. Наиболее известным методом для исследования с одной переменной является метод последовательности Фибоначчи, а наиболее известным методом для исследования с многими переменными является симплекс-метод. Эти методы можно применять в рамках изобретения, и, как только достигаются приемлемые траектории (отвечающие минимальным задачам, поставленным оператором), оптимизация завершается, и заданные траектории определены.
Далее следует более подробное описание не ограничительных примеров контроля траекторий в ходе исполнения маневра последовательно в полуавтоматическом и автоматическом режимах работы системы управления и направления маневров.
В случае автоматической работы главный блок 5 сам определяет корректирующие действия, и на основе своего алгоритма управления главный блок 5 берет на себя управление органами, необходимыми для осуществления этих корректирующих действий. Из соображений безопасности оператор может переходить к ручному контролю комплекса трактор-орудия.
Например, контроль рулевой тяги трактора 2 (или ее эквивалента) осуществляет главный блок 5 машины 3. Система управления и направления может также контролировать скорость движения трактора. Оператор может получать информацию от устройства индикации интерфейса 8 связи о ходе операций, контролируемых системой направления. Например, оператор может деактивировать систему управления и направления маневров в конце траектории, чтобы скорректировать возможное отклонение.
Для вычисления поправок траектории можно использовать, в частности, следующие известные параметры, показанные на фиг. 6:
- Вокруг заданной траектории определяют «полосу допуска» (ВТ) без коррекции траектории. Отклонение в момент t между заданной траекторией машины 3, 3', 3'' и ее теоретической траекторией обозначают Etn, где n является относительным положением данной машины в комплексе (n=1 для трактора, n=2 для первой прицепной машины и т.д.). Коррекцию траектории не осуществляют, если Etn находится в полосе допуска ВТ.
- Определяют «полосу коррекции траектории» (ВС) вокруг заданной траектории. Если отклонение между реальной траекторией и заданной траекторией трактора 2 выходит за пределы этой полосы коррекции траектории, трактор должен повернуть направо или налево на максимуме своих возможностей.
- Динамический допуск (d), который соответствует максимальному допустимому времени выхода из полосы допуска. В случае отклонения необходимо скорректировать траектории на время, меньшее d.
Внутри полосы коррекции траектории и за пределами полосы допуска поправки траектории можно вычислять в соответствии с методом ПИД-регулирования, упрощенным до линейной комбинации его составляющих (пропорциональное действие, интегральное действие, дифференциальное действие), или можно вычислять при помощи метода регулирования с нечеткой логикой.
Относительно ПИД-регулирования примеры применения с автоматическим регулированием положения (то есть отслеживания траектории) приведены в следующей публикации: Jacob D. (2004), Применение ПИД-управления - Автоматическое регулирование температуры и положения, Инженерные технологии, S 7 718, 2-24.
Использование нечеткой логики для направления транспортного средства известно, например, из публикации Yung, N.H.C & Chang Y. (1999), "An intelligent mobile vehicle navigator based on fuzzy logic and reinforcement learning" (навигатор умного самоходного транспортного средства, основанный на нечеткой логике и на обучении усиления), Systems, Man, and Cybernetics, Part В: Cybernetics, IEEE Transactions on, vol. 29, n° 2, 314-321. Попытка применения нечеткой логики для управления сельскохозяйственной бороной описана в публикации Cho S.I. & KI N.H. (1999), "Autonomous speed sprayer guidance using machine vision and fuzzy logic" (направление автономной быстрой бороны с использованием машинного обзора и нечеткой логики), Transaction of the ASAE, vol. 42, n° 4, 1137-1143. В целом эти протоколы отвечают базовым правилам регулирования с нечеткой логикой, упомянутым, например, в публикации Buehler Н. (1994), «Регулирование при помощи нечеткой логики», Ed. Presses Polytechniques et Universitaires Romandes, 181 c.
Параметризацию коррекции траектории может корректировать оператор (полоса допуска, полоса коррекции траектории, параметры ПИД-регулирования, параметры регулирования с нечеткой логикой или другие возможности). В этой связи можно указать метод последовательных приближений (CERR М. (1991), Промышленные инструменты, Том 2, Col. Tec et Doc. Ed. Lavoisier, 747 с., в частности, страницы 273 и 274). Можно также осуществлять процесс идентификации (Метод Найквиста, Стрейча, Бройда, Циглера и Николса, Денделе) путем ручного исполнения маневра многошарнирного комплекса и затем математического моделирования.
Параметризацию можно также осуществлять в адаптивном режиме (параметризация оптимизируется сама в зависимости от остаточных отклонений между заданным значением и проходимыми траекториями). Существуют многие адаптивные схемы коррекции (M'Saad М. & Chebassier J. (2000), Адаптивное управление системами, Инженерные технологии, S 7 426, 1-25). Эти методы можно применять как при ПИД-регулировании, так и при нечеткой логике. Умный «слой», который оптимизирует правило управления схемы коррекции, может использовать разные принципы, в том числе процесс самообучения (например, типа нейронной сети).
В целом предложенные способы автоматической коррекции являются частью большой группы методов автоматического регулирования, используемых в мобильной робототехнике для направления транспортного средства, например, описанных в публикации Fargeon С. & Quin J-P. (1993), «Мобильная робототехника», Ed. Teknea et DGA, 358 c., в частности, в главах 5 и 9.
Можно предложить режим автоматического регулирования по умолчанию. С учетом скорости вращения рулевого колеса, которая является ограниченной, в этом случае необходимо интегральное действие (в противном случае будет оставаться небольшое остаточное отклонение траектории). Сочетая коэффициент усиления трактора (полученный путем калибровки или вычисленный при помощи данных конструктора) с фиксированной скоростью вращения рулевого колеса, можно, например, вычислить ПИ-значение коррекции по умолчанию в соответствии с методом, приведенным в CERR (1991), который основан на переменных, обозначаемых Tu и Tg и полученных после испытания. Можно также включать в изобретение метод регулирования с нечеткой логикой по умолчанию, основанный на том же принципе.
Можно также напомнить, что в режиме полуавтоматической работы:
- заданное значение устанавливает главный блок 5,
- приведение в действие приводов (по меньшей мере трактора 2) осуществляет оператор.
Возможно также, что главный блок 5 выдает элементы информации (в результате вычисления) по необходимым корректирующим действиям и их интенсивности (в зависимости от уровня усовершенствования системы обеспечения содействия в вождении).
В случае режима полуавтоматической работы под наблюдением человека можно использовать несколько технологических уровней.
На самом простом уровне элемент информирует оператора о предназначенных для соблюдения заданных траекториях (или о напрямую связанной с ними величине или величинах, таких как значения углов складывания на шарнирных соединениях между двумя сцепленными компонентами или значения угла поворота управляемых колес). Это соответствует работе типа «Momtoring» (мониторинг), и оператор осуществляет необходимые операции для получения этого результата.
На более высоком уровне содействия оператор может также располагать данными об отклонении между заданными траекториями (которые можно оценить или измерить) и реально проходимыми траекториями (или об одной или нескольких напрямую связанных с ними величин). Эта данные позволяют построить одну или несколько переменных отклонения, которые оператор должен минимизировать вручную, производя необходимые изменения направления.
Главный блок 5 вычисления и управления системы может предложить оператору соответствующие стратегии принятия решения через интерфейс 8 связи и диалога человек-машина (например, он может предложить поворачивать рулевое колесо быстрее или медленнее в данном направлении). Этот режим полуавтоматической работы соответствует работе типа «обеспечения содействия в вождении и принятии решения». Способы вычисления являются, например, аналогичными способам, применяемым в случае автоматической работы, и их можно применять, чтобы предложить оператору действия для осуществления в режиме «обеспечения содействия в вождении». Вместе с тем, упрощенный способ вычисления можно также применять в полуавтоматическом режиме. Этот упрощенный способ основан на схеме коррекции с нечеткой логикой (см., например, Kaufman А. (1992), Введение в нечеткую логику, Инженерные технологии, А 120, R 7 032, 1-9).
В ходе маневра главный блок 5 системы управления и направления вычисляет действия, предназначенные для осуществления на уровне силовых и направляющих органов трактора 2, чтобы трактор следовал заданной траектории и соблюдал условия, параметризованные оператором. Это вычисление можно факультативно производить при помощи данных геолокализации, поступающих, например, от устройства GPS. Это вычисление можно осуществлять на основании данных, поступающих от датчиков комплекса 1 независимо от системы геолокализации. Осуществляемые вычисления позволяют сравнить реальное положение трактора и прицепных машин с их теоретическими положениями (определенными в соответствии с их заданными траекториями). Система управления и направления компенсирует отклонение между реальной траекторией и заданной траекторией. Для этого характеристики, относящиеся к машинам 3, 3', 3'', сохраняют в памяти при помощи интерфейса 9 связи в системе управления и направления. Характеристики техники можно также получать (независимо от параметризации алгоритма коррекции траектории) посредством экспериментальной параметризации. Экспериментальная параметризация состоит в осуществлении операции на тракторе (например, вращение рулевого колеса до упора вправо или влево с последующим перемещением многошарнирного комплекса и с сохранением в памяти изменения углов складывания между сцепленными элементами), после чего компьютерная программа определяет параметры, необходимые для вычислений. На сельскохозяйственной технике устанавливают дополнительные датчики для дополнения или замены данных, поступающих от устройства геолокализации (на точках шарнирного соединения 4, 4', 4'' закрепляют по меньшей мере датчики углов или на компонентах комплекса закрепляют инфракрасные устройства измерения).
Разумеется, изобретение не ограничивается вариантами выполнения, описанными со ссылками на прилагаемые чертежи. В них можно вносить изменения с точки зрения состава различных элементов или их замены техническими эквивалентами, не выходя при этом за пределы объема защиты изобретения.
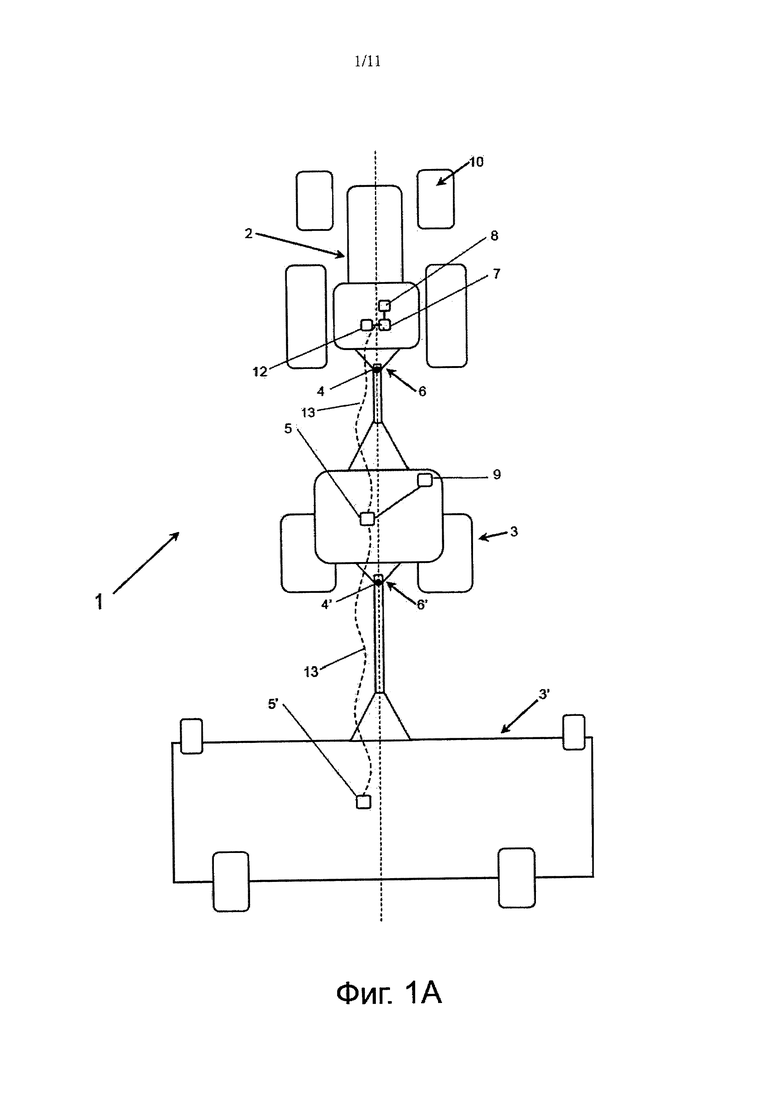
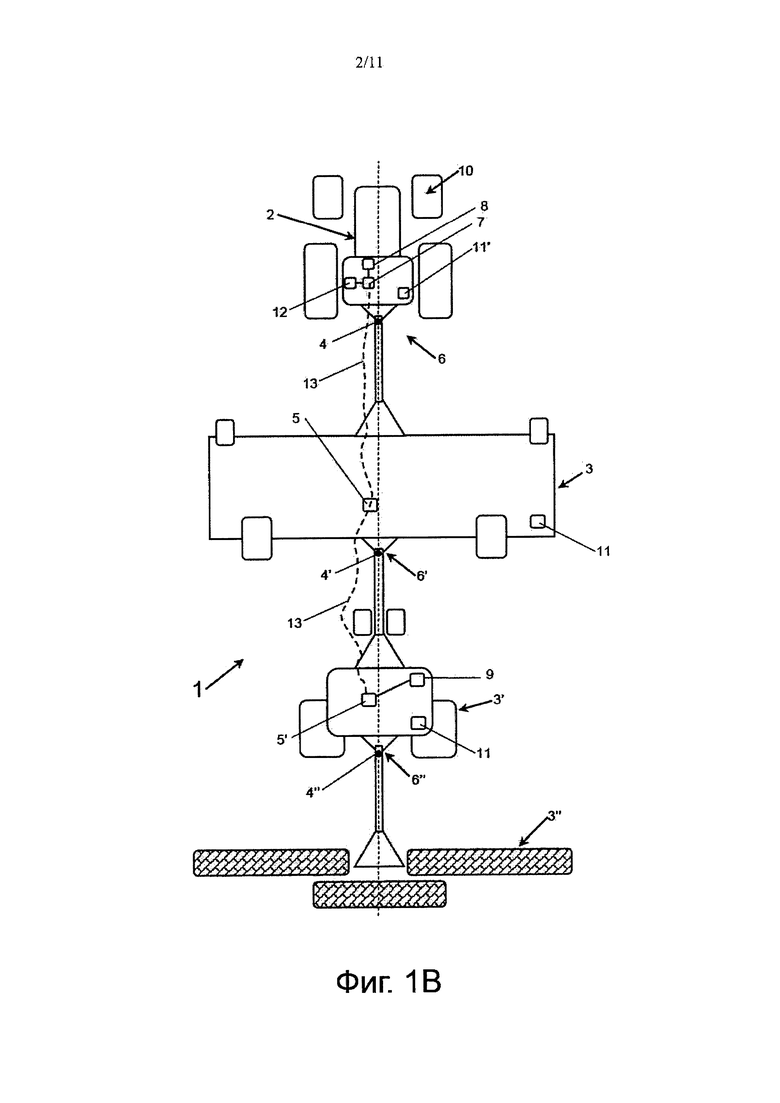
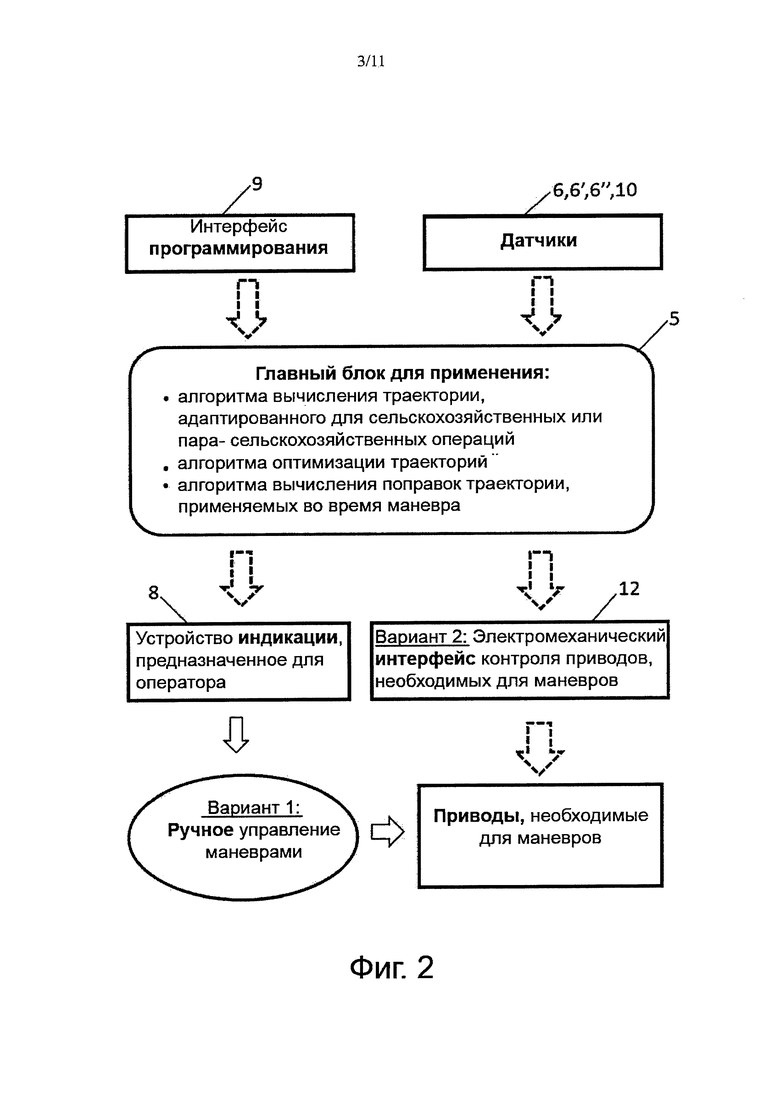
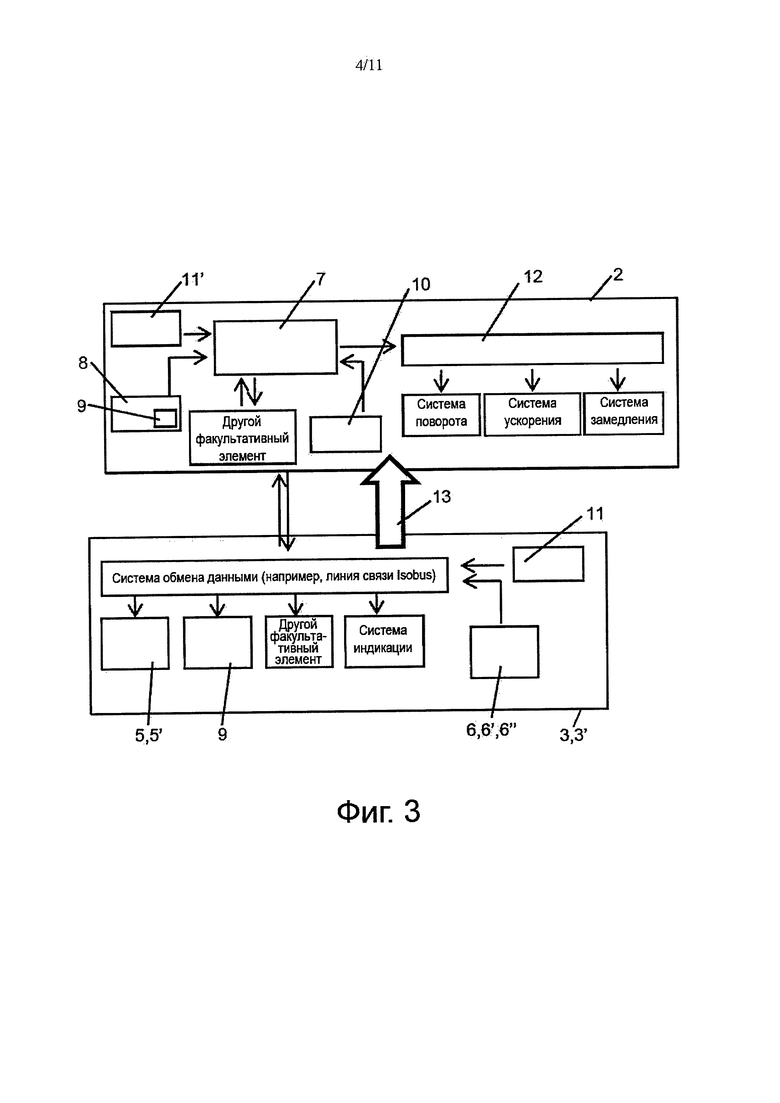
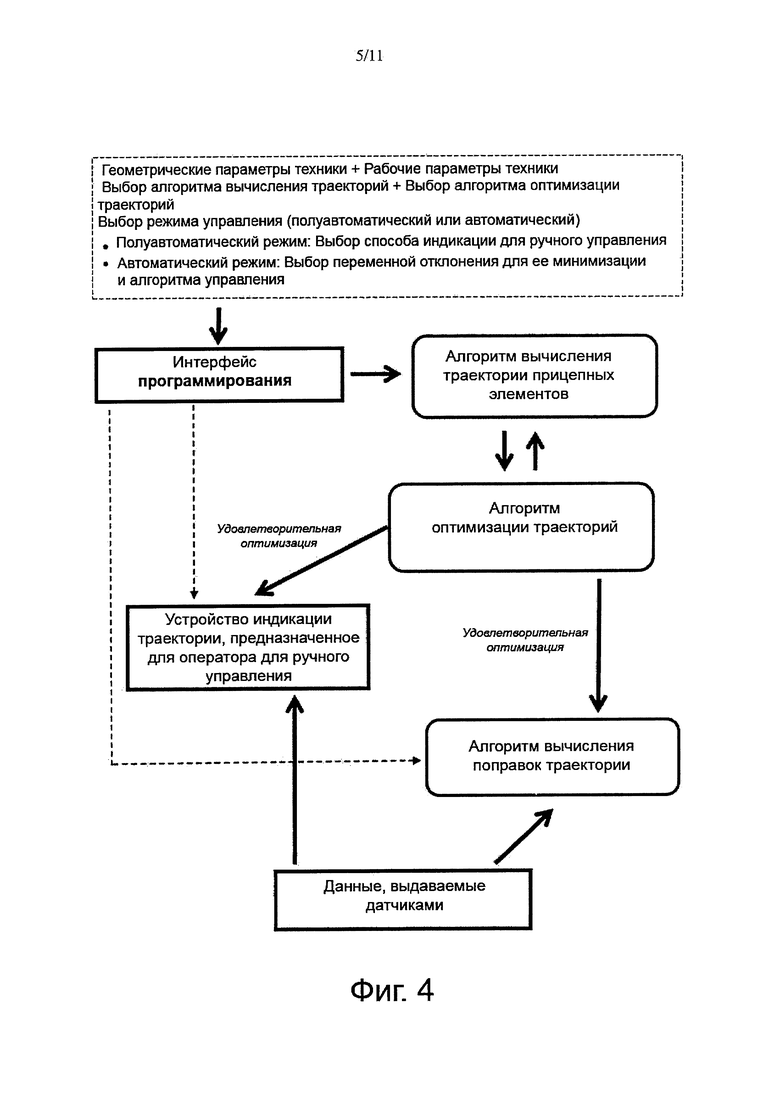
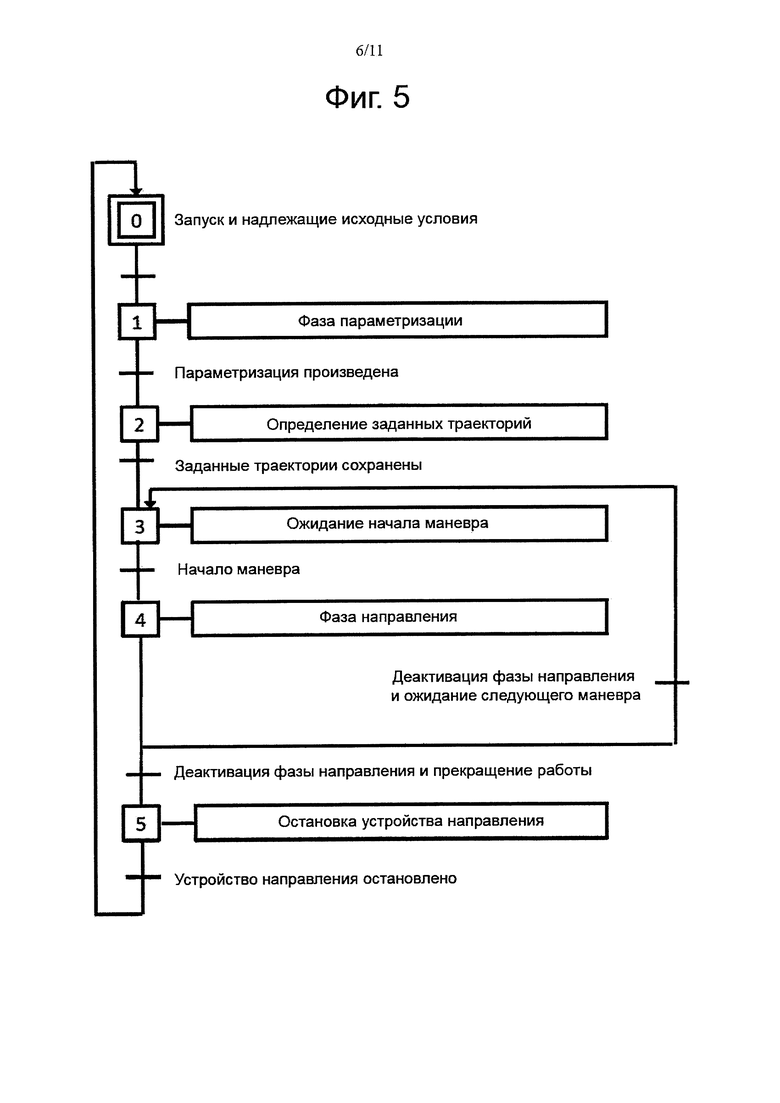
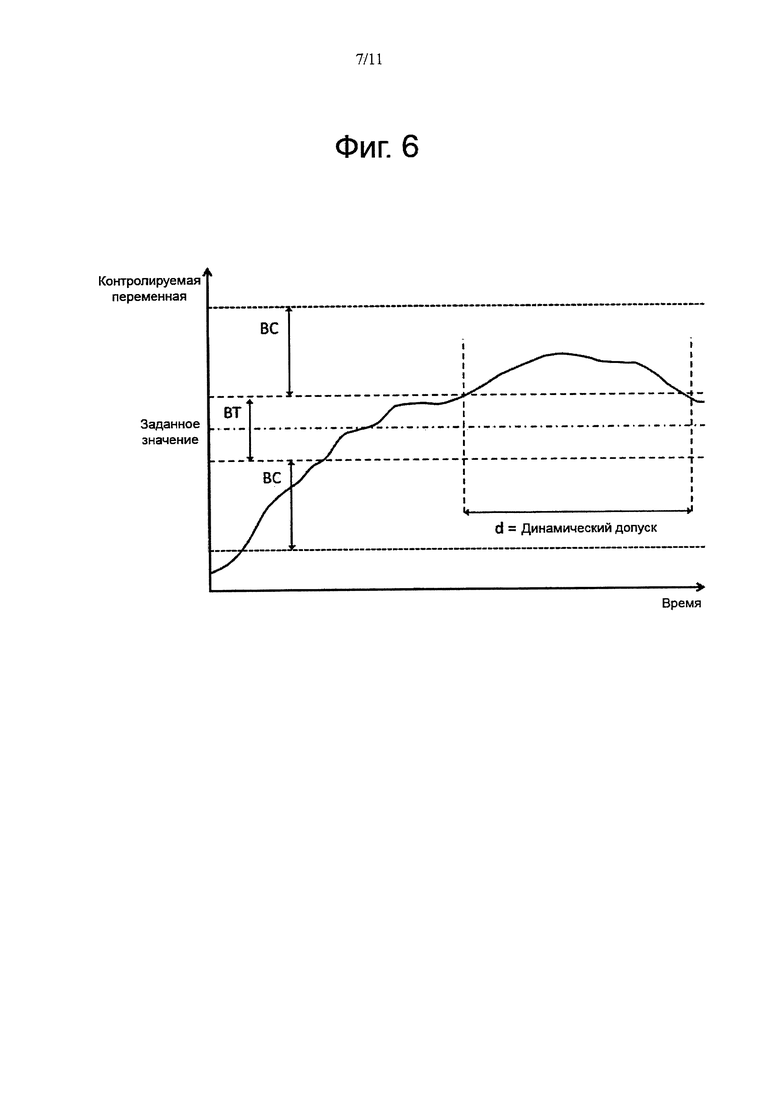
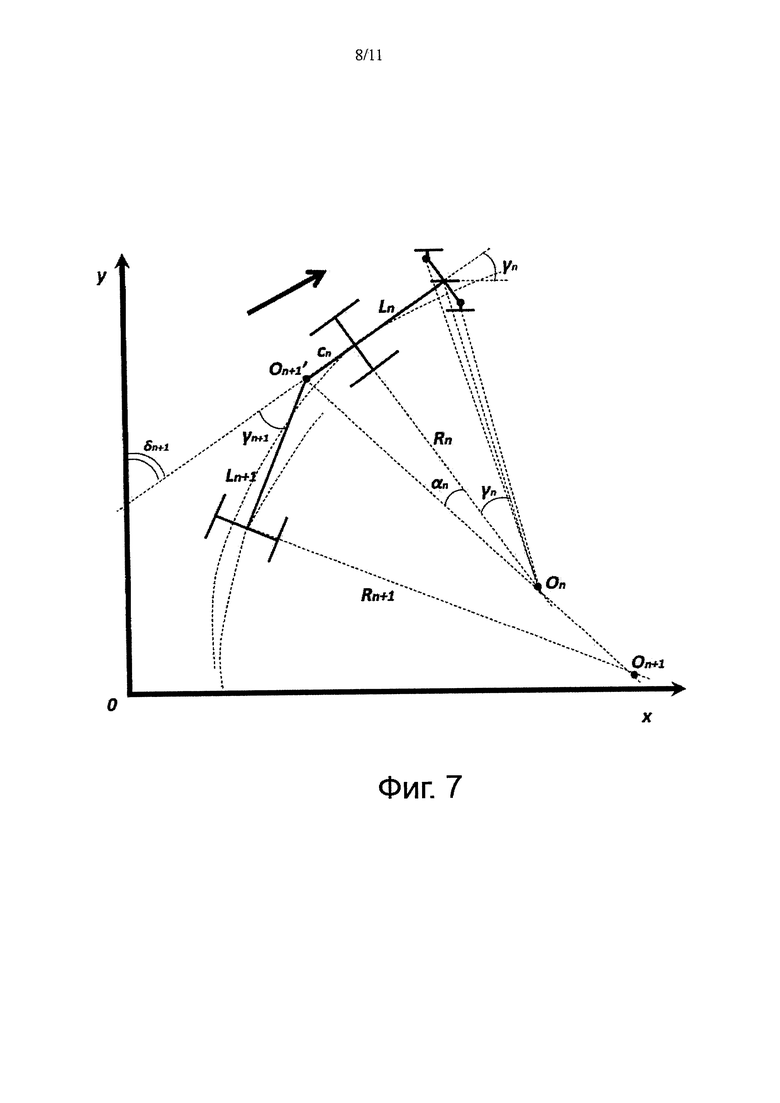
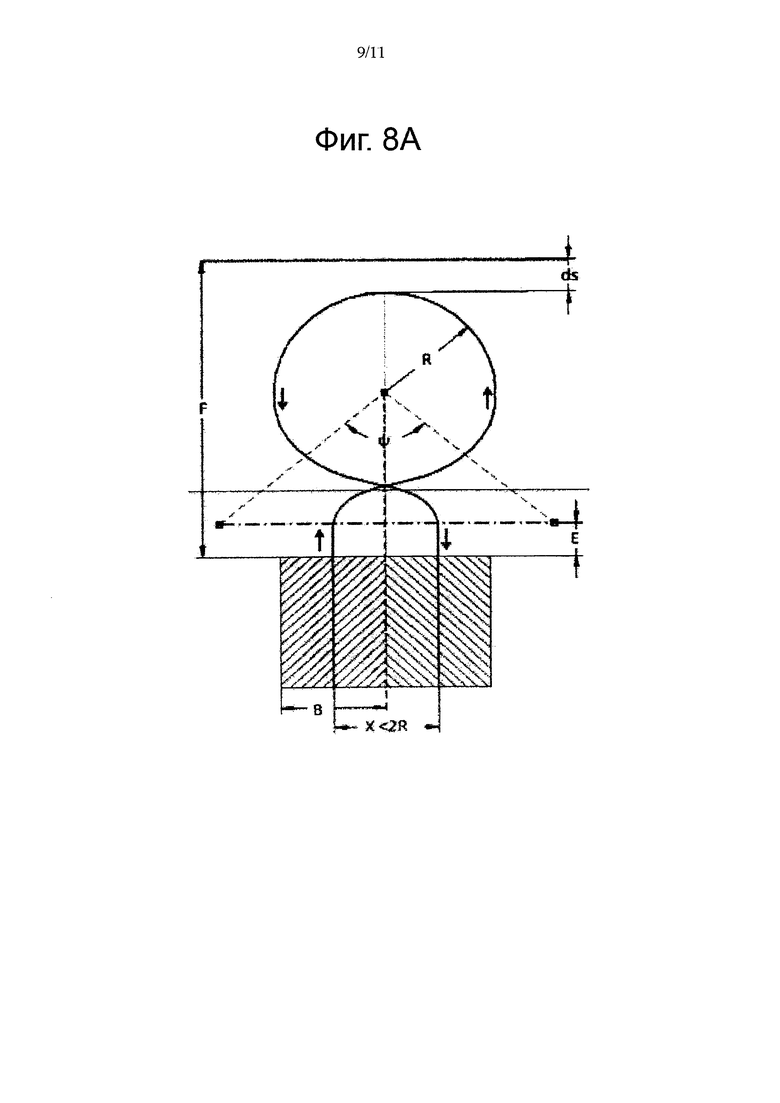
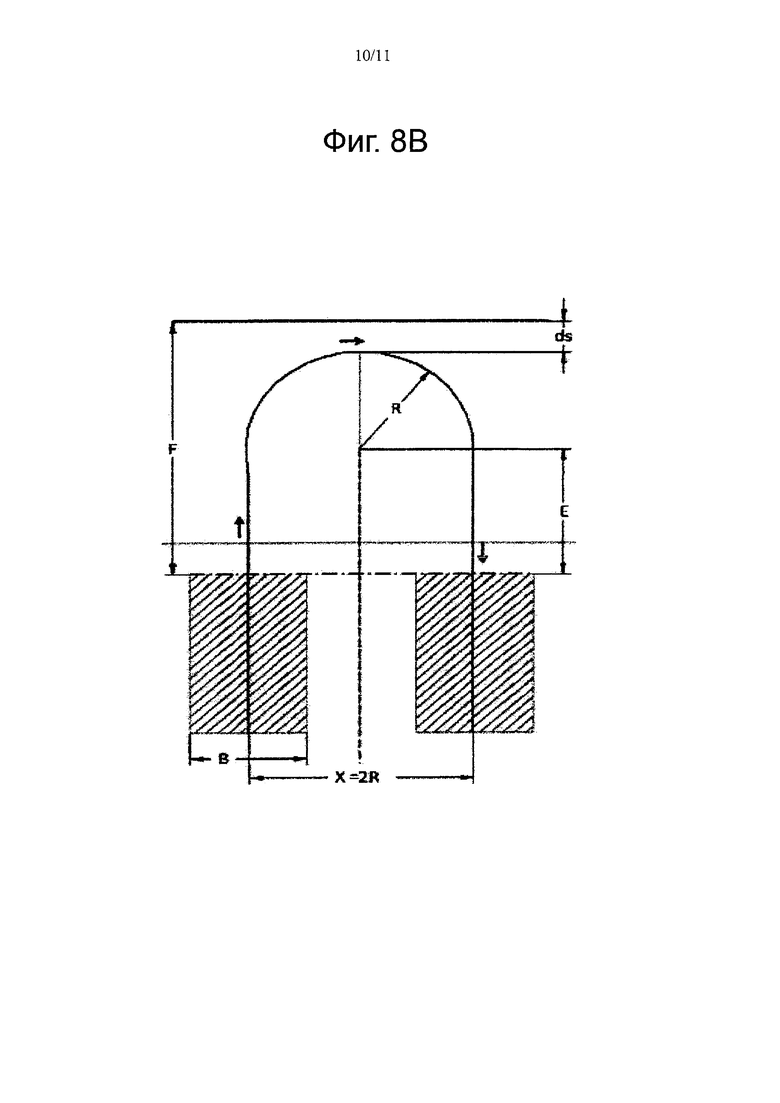
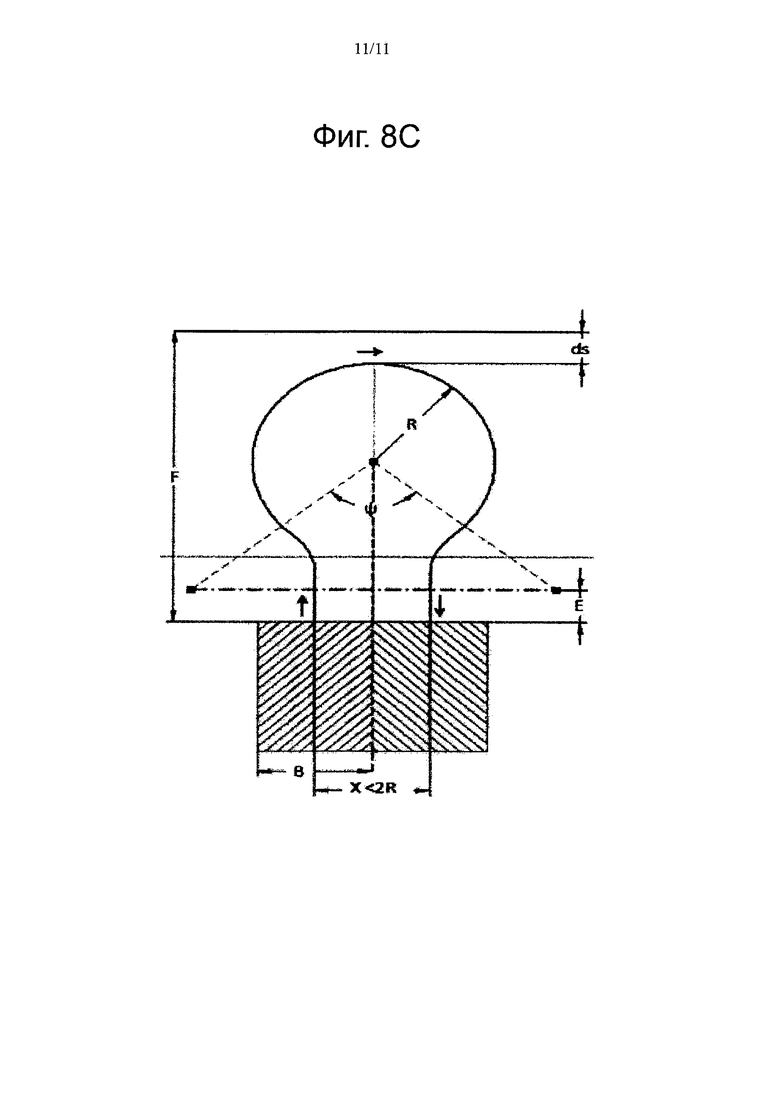
Группа изобретений относится к сельскому хозяйству. Комплекс включает в себя в качестве составных рабочих компонентов трактор и по меньшей мере одну буксируемую или полунавесную сельскохозяйственную машину, сцепленную напрямую с указанным трактором или с предыдущей машиной в комплексе при помощи по меньшей мере одного шарнирного соединения. Комплекс содержит систему управления и направления маневров, в частности, разворотов, содержащую по меньшей мере один блок вычисления и управления, встроенный в прицепную машину или одну из прицепных машин и связанный по меньшей мере с одним датчиком, передающим в него текущие взаимные относительные положения двух компонентов каждой пары рабочих компонентов комплекса, соединенных между собой при помощи шарнирного соединения, а также с блоком контроля и управления трактором и/или с интерфейсом связи, в частности, индикации и, возможно, управления для связи с трактористом, и также по меньшей мере с одним средством параметризации или программирования дополнительных функциональных компонентов. Дополнительные функциональные компоненты, с которыми связан вышеупомянутый блок вычисления и управления, тоже являются частью системы управления и направления маневров. Блок вычисления и управления прицепной сельскохозяйственной машиной или одной из прицепных сельскохозяйственных машин представляет собой главный блок системы управления и направления маневров и предпочтительно комплекса. Главный блок системы управления и направления маневров выполнен с возможностью под контролем программы, адаптированной для управления маневрами, вычислять заданную траекторию по меньшей мере для одного предстоящего маневра, начинаемого автоматически или трактористом, на основе предварительно запрограммированных параметров, относящихся к характеристикам и физическим величинам трактора и прицепной машины или прицепных машин, к задачам и/или к условиям осуществляемой сельскохозяйственной работы и к обрабатываемому участку, а также к выбору работы комплекса, с применением алгоритма предсказания траекторий и алгоритма оптимизации заданных значений траекторий, а также автоматически выполнять указанный маневр или содействовать полуавтоматическому выполнению указанного маневра, причем, возможно, многократно, управляя трактором напрямую или через его блок контроля и управления и определяя во время маневра отклонения между заранее определенной заданной траекторией и реальной или текущей оценочной траекторией с целью их автоматической коррекции или оповещения тракториста в полуавтоматическом режиме, возможно, после вычисления маневров для коррекции траектории при помощи соответствующего алгоритма. Способ автоматического или полуавтоматического управления маневрами, в частности, разворотами шарнирного или многошарнирного комплекса, включающего в себя трактор и по меньшей мере одну буксируемую или полунавесную сельскохозяйственную машину, сцепленную напрямую с указанным трактором или с предыдущей машиной в комплексе при помощи по меньшей мере одного шарнирного соединения, а также систему управления и направления маневров, в частности, разворотов. Система управления и направления маневров содержит один блок вычисления и управления, встроенный в указанную прицепную машину или одну из прицепных машин и связанный по меньшей мере с одним датчиком, передающим в него текущие взаимные относительные положения двух компонентов каждой пары рабочих компонентов комплекса, соединенных между собой при помощи шарнирного соединения, а также с блоком контроля и управления трактора и/или с интерфейсом связи, в частности, индикации и, возможно, управления для связи с трактористом, и также по меньшей мере с одним средством параметризации или программирования. Связанные с блоком вычисления и управления указанные дополнительные функциональные компоненты тоже являются частью указанной системы управления и направления маневров. При помощи блока вычисления и управления рассматриваемой сельскохозяйственной машины, действующего как главный блок указанной системы управления и направления маневров комплекса, и при исполнении программы, адаптированной для управления маневрами, вычисляют заданную траекторию по меньшей мере для одного предстоящего маневра, начинаемого автоматически или трактористом, на основе предварительно запрограммированных параметров, относящихся к надлежащим конструктивным, функциональным и размерным характеристикам трактора и прицепной машины или прицепных машин, к задачам и/или к условиям осуществляемой сельскохозяйственной работы и к обрабатываемому участку, а также к выбору работы комплекса, с применением алгоритма предсказания траекторий и алгоритма оптимизации заданных значений траекторий. Затем автоматически осуществляют указанный маневр или содействуют полуавтоматическому исполнению указанного маневра, причем, в случае необходимости, многократно, при этом управляют трактором напрямую или через его блок контроля и управления и определяют во время маневра отклонения между заранее определенной заданной траекторией и реальной или текущей оценочной траекторией с целью их автоматической коррекции или оповещения тракториста в полуавтоматическом режиме, возможно, после вычисления показателей коррекции траектории при помощи соответствующего алгоритма. Обеспечивается повышение эффективности полуавтоматического или автоматического управления и направления маневров комплекса трактор-машины. 2 н. и 17 з.п. ф-лы, 11 ил., 1 табл.
1. Комплекс, включающий в себя в качестве составных рабочих компонентов трактор (2) и по меньшей мере одну буксируемую или полунавесную сельскохозяйственную машину (3, 3', 3''), сцепленную напрямую с указанным трактором (2) или с предыдущей машиной (3, 3') в комплексе при помощи по меньшей мере одного шарнирного соединения (4, 4', 4''), при этом указанный комплекс (1) содержит также систему управления и направления маневров, в частности, разворотов, содержащую по меньшей мере один блок (5, 5') вычисления и управления, встроенный в прицепную машину или одну из прицепных машин (3, 3', 3'') и связанный по меньшей мере с одним датчиком (6, 6', 6''), передающим в него текущие взаимные относительные положения двух компонентов (2, 3; 3, 3'; 3', 3'') каждой пары рабочих компонентов (2, 3, 3', 3'') комплекса, соединенных между собой при помощи шарнирного соединения (4, 4', 4''), а также с блоком (7) контроля и управления трактором (2) и/или с интерфейсом (8) связи, в частности, индикации и, возможно, управления для связи с трактористом, и также по меньшей мере с одним средством (9) параметризации или программирования дополнительных функциональных компонентов (6, 6', 6'', 7, 8, 9), причем эти дополнительные функциональные компоненты, с которыми связан вышеупомянутый блок (5, 5') вычисления и управления, тоже являются частью системы управления и направления маневров, отличающийся тем, что
блок (5, 5') вычисления и управления прицепной сельскохозяйственной машиной (3) или одной из прицепных сельскохозяйственных машин (3', 3'') представляет собой главный блок системы управления и направления маневров и предпочтительно комплекса (1), и
указанный блок выполнен с возможностью под контролем программы, адаптированной для управления маневрами:
вычислять заданную траекторию по меньшей мере для одного предстоящего маневра, начинаемого автоматически или трактористом, на основе предварительно запрограммированных параметров, относящихся к характеристикам и физическим величинам трактора (2) и прицепной машины или прицепных машин (3, 3', 3''), к задачам и/или к условиям осуществляемой сельскохозяйственной работы и к обрабатываемому участку, а также к выбору работы комплекса (1), с применением алгоритма предсказания траекторий и алгоритма оптимизации заданных значений траекторий, а также
автоматически выполнять указанный маневр или содействовать полуавтоматическому выполнению указанного маневра, причем, возможно, многократно, управляя трактором (2) напрямую или через его блок (7) контроля и управления и определяя во время маневра отклонения между заранее определенной заданной траекторией и реальной или текущей оценочной траекторией с целью их автоматической коррекции или оповещения тракториста в полуавтоматическом режиме, возможно, после вычисления маневров для коррекции траектории при помощи соответствующего алгоритма.
2. Комплекс по п. 1, отличающийся тем, что содержит по меньшей мере один дополнительный датчик (10) на тракторе (2), выполненный с возможностью передачи информации об угле поворота управляемых колес (2'), скорости вращения ведущих колес (2''), абсолютной скорости движения, положении по высоте его трехточечной сцепки и/или скорости вращения его механизма отбора мощности.
3. Комплекс по п. 1 или 2, отличающийся тем, что содержит по меньшей мере две сельскохозяйственные машины (3, 3'), прицепленные последовательно одна за другой к трактору (2), при этом первая машина (3) из данной последовательности соединена с трактором (2) напрямую и является буксируемой, навесной или полунавесной, и вторая машина (3'), а также возможные следующие машины (3'') шарнирно соединены с машиной (3, 3'), соответственно находящейся перед ними, при этом по меньшей мере один датчик (6, 6', 6''), выдающий сигнал указания взаимного относительного положения двух рабочих компонентов (2, 3, 3', 3''), соединенных между собой через шарнирное соединение (4, 4', 4''), подсоединен или установлен на указанном шарнирном соединении или на каждом шарнирном соединении (4, 4', 4'').
4. Комплекс по любому из пп. 1-3, отличающийся тем, что указанное шарнирное соединение или каждое шарнирное соединение (4, 4', 4'') имеет по меньшей мере одну степень свободы в виде возможности поворота вокруг оси поворота, вертикальной и/или перпендикулярной к земле, при этом указанный датчик или некоторые датчики, или каждый датчик (6, 6', 6''), связанный(ые) с шарнирным соединением или с шарнирными соединениями (4, 4', 4''), выдает(ют) сигнал, указывающий на конфигурацию соответствующего(их) шарнирного соединения или шарнирных соединений (4, 4', 4'') относительно соответствующей оси вращения.
5. Комплекс по любому из пп. 1-4, отличающийся тем, что трактор (2) и/или по меньшей мере одна из буксируемых сельскохозяйственных машин (3, 3', 3'') оснащены антенной (11, 11') геолокации, данные из которой поступают в главный блок (5) вычисления и управления и обрабатываются этим блоком в автоматическом режиме и/или выводятся на интерфейс (8) связи.
6. Комплекс по любому из пп. 3-5, отличающийся тем, что главный блок (5) вычисления и управления, а также, в случае необходимости, антенна (11) геолокации установлены на первой сельскохозяйственной машине (3), напрямую соединенной с трактором (2), когда она является буксируемой или полунавесной.
7. Комплекс по любому из пп. 1-6, отличающийся тем, что главный блок (5) вычисления и управления соединен с силовым интерфейсом (12) управления трактора или с его блоком (7) контроля и управления через шину (13) связи, при этом шина (13) обеспечивает также передачу данных между этим главным блоком (5) и другими функциональными компонентами (8, 10, 11') указанной системы управления и направления, которыми может быть оснащен трактор (2).
8. Комплекс по любому из пп. 1-7, отличающийся тем, что интерфейс (8) связи с трактористом дополнительно содержит средство выбора режима работы из режимов работы с полностью автоматическим управлением, полуавтоматическим управлением и ручным управлением.
9. Способ автоматического или полуавтоматического управления маневрами, в частности, разворотами шарнирного или многошарнирного комплекса (1), включающего в себя трактор (2) и по меньшей мере одну буксируемую или полунавесную сельскохозяйственную машину (3, 3', 3''), сцепленную напрямую с указанным трактором (2) или с предыдущей машиной в комплексе при помощи по меньшей мере одного шарнирного соединения (4, 4', 4''), а также систему управления и направления маневров, в частности, разворотов, содержащую один блок (5, 5') вычисления и управления, встроенный в указанную прицепную машину или одну из прицепных машин и связанный по меньшей мере с одним датчиком (6, 6', 6''), передающим в него текущие взаимные относительные положения двух компонентов каждой пары рабочих компонентов (2, 3, 3', 3'') комплекса (1), соединенных между собой при помощи шарнирного соединения (4, 4', 4''), а также с блоком (7) контроля и управления трактора (2) и/или с интерфейсом (8) связи, в частности, индикации и, возможно, управления для связи с трактористом, и также по меньшей мере с одним средством (9) параметризации или программирования, причем эти дополнительные функциональные компоненты (6, 6', 6'', 7, 8, 9) тоже являются частью указанной системы управления и направления маневров,
отличающийся тем, что при помощи блока (5) вычисления и управления рассматриваемой сельскохозяйственной машины (3), действующего как главный блок указанной системы управления и направления маневров комплекса (1), и при исполнении программы, адаптированной для управления маневрами, вычисляют заданную траекторию по меньшей мере для одного предстоящего маневра, начинаемого автоматически или трактористом, на основе предварительно запрограммированных параметров, относящихся к надлежащим конструктивным, функциональным и размерным характеристикам трактора (2) и прицепной машины или прицепных машин (3, 3', 3''), к задачам и/или к условиям осуществляемой сельскохозяйственной работы и к обрабатываемому участку, а также к выбору работы комплекса (1), с применением алгоритма предсказания траекторий и алгоритма оптимизации заданных значений траекторий,
затем автоматически осуществляют указанный маневр или содействуют полуавтоматическому исполнению указанного маневра, причем, в случае необходимости, многократно, при этом управляют трактором (2) напрямую или через его блок (7) контроля и управления и определяют во время маневра отклонения между заранее определенной заданной траекторией и реальной или текущей оценочной траекторией с целью их автоматической коррекции или оповещения тракториста в полуавтоматическом режиме, возможно, после вычисления показателей коррекции траектории при помощи соответствующего алгоритма.
10. Способ по п. 9, отличающийся тем, что в режиме полуавтоматического управления маневром для оператора, находящегося в тракторе (2), и предпочтительно при помощи устройства индикации, являющегося частью интерфейса (8) связи, выводят предписанную заданную траекторию, в случае необходимости, скорректированную или обновленную в ходе маневра в зависимости от положения трактора (8), сельскохозяйственной машины (3, 3', 3'') и/или комплекса (1), и разрешают оператору осуществить маневр в пределах условий обстановки и безопасности, а также физических, кинематических и механических возможностей комплекса (1), при этом блок (5) вычисления и управления рассматриваемой сельскохозяйственной машины (3) предоставляет помощь для принятия решения в виде рекомендованной траектории и, возможно, более или менее подробных указаний для осуществления действий с целью управления маневром и/или коррекции траектории.
11. Способ по п. 9, отличающийся тем, что в автоматическом режиме управления маневром при помощи главного блока (5) учитывают данные, поступающие по меньшей мере от одной антенны (11, 11') геолокации, которой оснащен трактор (2) или по меньшей мере одна из прицепных машин (3', 3'').
12. Способ по любому из пп. 9-11, отличающийся тем, что перед обработкой поля, предпочтительно сразу после формирования комплекса (1) с целью простой или сложной работы производят параметризацию алгоритма вычисления траекторий, вводя в главный блок (5) различные функциональные, конструктивные и размерные характеристики трактора (2) и сельскохозяйственной машины или других сельскохозяйственных машин данного комплекса (1).
13. Способ по любому из пп. 9-12, отличающийся тем, что для каждого шарнирного соединения (4, 4', 4'') учитывают по меньшей мере одну степень свободы в виде возможности поворота вокруг оси вращения вертикальной и/или перпендикулярной к земле, при этом указанный датчик, некоторые датчики или каждый датчик (6, 6', 6''), связанный(ые) с указанным шарнирным соединением или шарнирными соединениями (4, 4', 4''), выдает сигнал, указывающий на конфигурацию соответствующего(их) шарнирного(ых) соединения(ий) (4, 4', 4'') относительно соответствующей оси вращения.
14. Способ по п. 12 или 13, отличающийся тем, что во время фазы параметризации алгоритма вычислений траекторий используют следующие характеристики и физические величины:
максимальный угол поворота трактора (2),
максимальные значения ширины компонентов (2, 3, 3', 3'') комплекса (1),
требуемая скорость движения во время маневра,
максимальная угловая скорость поворота управляемых колес трактора (2),
максимальные углы складывания или поворота между компонентами (2, 3, 3', 3'') комплекса,
расстояние между задним мостом компонента комплекса (1) и точкой сцепки со связанным с ним следующим компонентом,
расстояние между задним мостом прицепного компонента и его точкой сцепки с предыдущим компонентом,
базы компонентов кинематической системы, образованной комплексом (1),
направление поворота: правое или левое.
15. Способ по любому из пп. 11-14, отличающийся тем, что выполняют параметризацию алгоритма оптимизации траектории с учетом преследуемых задач оптимизации, таких как, например, минимизация времени работы, минимизация расстояния, проходимого одним из компонентов (2, 3, 3', 3'') комплекса (1) во время маневра, и/или минимизация по меньшей мере одного геометрического размера, характеризующего пространство маневра, например, такого как ширина краевой полосы в случае разворота.
16. Способ по любому из пп. 11-15, отличающийся тем, что выполняют параметризацию алгоритма оптимизации траектории в случае управления разворотами путем указания требований к исполнению, например, таких как задание точки входа и/или точки выхода в зоне обработки почвы или культуры или задание максимальной допустимой ширины краевой полосы, соответствующей определенному кратному, например, 2 или 3, рабочей ширины самой широкой сельскохозяйственной машины (3, 3', 3'') комплекса (1).
17. Способ по любому из пп. 10-16, отличающийся тем, что во время маневра, контролируемого по вычисленной и оптимизированной заданной траектории, учитывают данные, выдаваемые различными датчиками (6, 6', 10), установленными на тракторе (2) и/или сельскохозяйственной(ых) машине(ах) (3, 3', 3''), и/или связанными с шарнирным соединением или различными шарнирными соединениями (4, 4', 4'') между компонентами (2, 3, 3', 3'') комплекса (1).
18. Способ по любому из пп. 11-17, отличающийся тем, что во время контролируемого исполнения маневра в соответствии с вычисленной и оптимизированной заданной траекторией учитывают данные, выдаваемые системой геолокализации, по меньшей мере одна соответствующая антенна (11, 11') которой установлена на сельскохозяйственной машине (3), содержащей главный блок (5), на другой сельскохозяйственной машине (3', 3'') комплекса (1) или на тракторе (2), и, в случае необходимости, определяют отклонения с предписанной заданной траекторией и отображают их и даже, в случае необходимости, вычисляют, и указывают оператору компенсационные меры, и/или корректируют их автоматически.
19. Способ по любому из пп. 11-18, отличающийся тем, что указанный маневр осуществляют под контролем главного блока (5) путем передачи команд из последнего в силовой интерфейс (12) управления трактора (2) для управления, в частности, системами поворота, ускорения и торможения указанного трактора (2).
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| US 2010256871 A1, 07.10.2010 | |||
| US 2015112557 A1, 23.04.2015 | |||
| DE 4025737 A1, 20.02.1992 | |||
| WO 2015065174 A1, 07.05.2015. | |||

