Данное изобретение относится к приводной системе для подвижного элемента гондолы двигателя летательного аппарата, такого как заслонка реверсора тяги.
Гондола двигателя летательного аппарата окружает двигатель и, кроме того, выполняет некоторое количество дополнительных функций, включая функцию реверсирования тяги.
Из уровня техники известно, что функция реверсирования тяги состоит в перенаправлении части тяги двигателя к передней стороне летательного аппарата с уменьшением тем самым тормозного пути во время приземления.
В случае решетчатой конструкции реверсора тяги, указанное изменение направления части тяги выполняется за счет смещения скольжением одного или более элементов, образующих заслонку реверсора тяги, что обеспечивает открытие решеток, отклоняющих вторичный воздушный поток (холодный поток) от двигателя к передней стороне гондолы.
Элементы, образующие заслонку реверсора тяги, традиционно приводятся в действие с использованием группы механических (обычно шариковинтового типа) или гидравлических (поршневого типа) приводов, распределенных по периферии гондолы, управление которыми обеспечивается схемами генерации гидравлической или электрической энергии, подсоединенными к общей электрической схеме летательного аппарата.
В контексте данного изобретения для средств генерации гидравлической энергии, энергия которых является гидравлической, управление приводами может обеспечиваться гидравлически (гидравлический привод) или механически (гидродвигатель, действующий на механический привод).
Подобным образом, в контексте данного изобретения, для средств генерации электрической энергии, энергия которых является электрической, управление приводами может обеспечиваться механически (электродвигатель, действующий на механический привод) или гидравлически (электродвигатель, действующий на гидродвигатель с помощью гидронасоса).
Из уровня техники, в частности из документа ЕР 1780394 А2, известно, что в случае механических приводов эти приводы соединены друг с другом кинематическим образом, как правило, посредством гибких валов, вследствие чего при управлении одним из них также обеспечивается управление и другим.
Задача данного изобретения заключается, в частности, в разработке средств, обеспечивающих возможность такой компенсации отказа в работе схемы генерации гидравлической или электрической энергии приводов, при которой этот отказ не повлияет на функционирование приводимого в действие элемента.
Указанная задача решена путем создания системы для приведения в действие по меньшей мере одного элемента гондолы летательного аппарата, содержащей по меньшей мере два привода, соединенные друг с другом кинематическим образом, первичную схему генерации гидравлической (соответственно, электрической) энергии, выполненную с возможностью управления по меньшей мере одним из указанных двух приводов, и вторичную схему генерации электрической (соответственно, гидравлической) энергии, выполненную с возможностью управления другим приводом.
Благодаря этим техническим признакам, в случае отказа первичной схемы, питаемой одним типом энергии, вторичная схема, питаемая другим типом энергии, принимает на себя функции первичной схемы, при этом указанное кинематическое соединение между приводами обеспечивает переключение одной схемы на другую, независимо от перемещения элемента гондолы.
В соответствии с другими необязательными признаками предложенной приводной системы:
указанные приводы являются механическими, причем первичная схема использует гидравлическую энергию, воздействующую на гидродвигатель, действующий на один из приводов, а вторичная схема использует электрическую энергию и содержит электродвигатель, действующий на гидравлический насос, который, в свою очередь, воздействует на гидродвигатель, действующий на другой привод;
указанные приводы являются механическими, причем первичная схема использует гидравлическую энергию, воздействующую на гидродвигатель, действующий на один из приводов, а вторичная схема использует электрическую энергию и содержит электродвигатель, действующий непосредственно на другой привод;
указанные приводы являются механическими, причем первичная схема использует электрическую энергию и содержит электродвигатель, воздействующий непосредственно на привод, а вторичная схема использует гидравлическую энергию, воздействующую на гидродвигатель, действующий на другой привод;
указанные приводы являются гидравлическими, причем первичная схема использует гидравлическую энергию, воздействующую непосредственно на один из приводов, а вторичная схема использует электрическую энергию и содержит электродвигатель, воздействующий на гидравлический насос, действующий непосредственно на другой привод;
указанные приводы являются гидравлическими, причем первичная схема использует электрическую энергию, воздействующую на гидравлический насос, который, в свою очередь, действует на один из приводов, а вторичная схема использует гидравлическую энергию, воздействующую непосредственно на другой привод,
указанная система содержит три привода, соединенные друг с другом кинематическим образом, причем первичная схема генерации гидравлической (соответственно электрической) энергии и вторичная схема генерации электрической (соответственно гидравлической) энергии, соответственно, соединены с двумя оконечным приводами кинематической цепи, образованной указанными тремя приводами: благодаря этим признакам, при поломке кинематического передаточного средства между двумя приводами (например, гибких валов в случае механических приводов) возможно обеспечить работу трех приводов за счет одновременного использования первичной и вторичной схем.
Другие особенности и преимущества настоящего изобретения становятся более понятными из последующего описания, изложенного со ссылкой на сопутствующие чертежи, на которых:
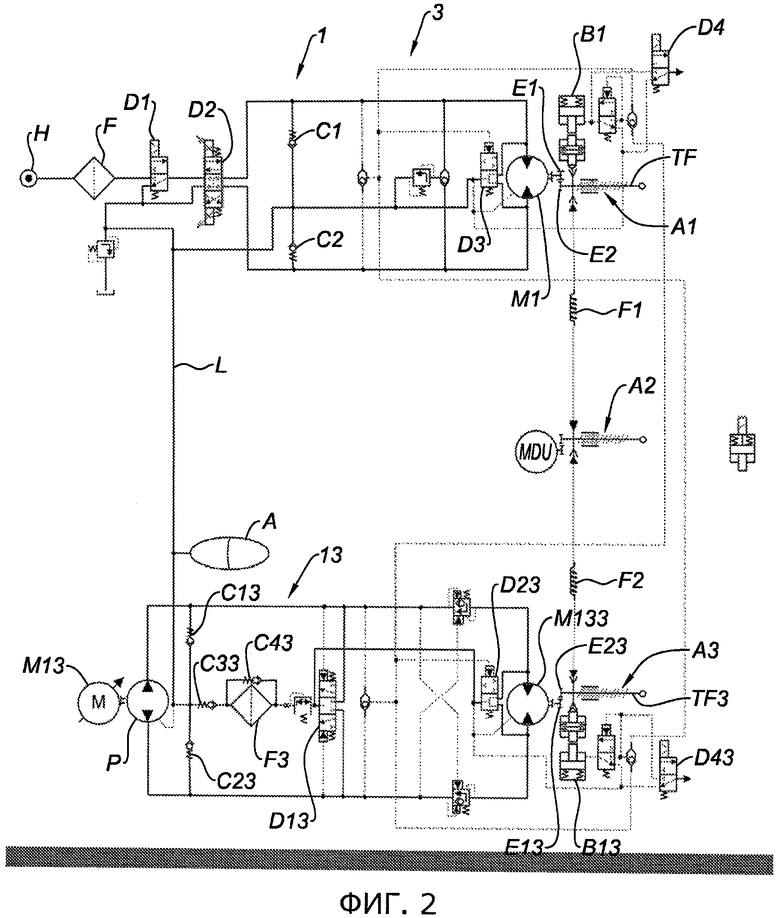
фиг.1 изображает схему управления предложенной системы, соответствующей первому варианту изобретения;
фиг.2 схематически изображает предложенную систему, соответствующую второму варианту изобретения.
На этих двух чертежах используются символы, принятые в настоящее время в области, связанной с гидравлическими схемами.
На обоих чертежах одинаковые или подобные номера позиций обозначают одинаковые или подобные группы элементов.
Фиг.1 изображает три механических привода А1, А2, A3 шариковинтового типа, известные из уровня техники. Подобные приводы обеспечивают возможность поступательного перемещения резьбового штока за счет его вращения в неподвижном элементе с внутренней резьбой.
Три привода А1, А2, A3 позволяют, в частности, смещать скольжением заслонки решетчатого реверсора тяги (не показан), установленного на гондоле летательного аппарата.
В этом случае три привода А1, А2, A3 разнесены друг от друга на равномерное угловое расстояние по периферии гондолы, чтобы сбалансировано распределять силы, действующие на заслонки реверсора.
Указанные три привода А1, А2, A3 соединены друг с другом гибкими передаточными валами, которые допускают совместное приведение в действие вращающихся резьбовых штоков приводов.
Более конкретно, как показано на фиг.1, первый гибкий вал F1 соединяет первый привод А1 со вторым приводом А2, а второй гибкий вал F2 соединяет второй привод А2 с третьим приводом A3.
Фиг.1 изображает гидравлическую схему 1, обеспечивающую управление первым приводом А1. Можно сказать, что эта гидравлическая схема 1, показанная сплошными линиями, использует гидравлическую энергию в том смысле, что она использует источник Н гидравлического давления от первичной гидравлической схемы летательного аппарата.
Поскольку указанная гидравлическая схема 1 является стандартной, то ее описание дается достаточно кратко.
Как показано на фиг.1, гидравлическая схема 1 содержит фильтр F, три распределителя D1, D2, D3, два предварительно нагруженных обратных клапана С1, С2, накопитель А, причем все эти элементы гидравлически соединены друг с другом так, чтобы обеспечить избирательное приведение в действие, в одном направлении или в другом направлении, гидродвигателя М1, характеризующегося постоянной частотой вращения и двумя направлениями вращения.
Этот двигатель М1 имеет на выходном валу зубчатое колесо Е1, взаимодействующее с зубчатым колесом Е2 вращающегося резьбового штока TF первого привода А1.
Гидравлическая схема 1 управления также соединена с электронной схемой 3 торможения (показана прерывистыми линиями), выполненной с возможностью избирательного воздействия на распределитель D1 с обеспечением замедления вращения резьбового штока TF привода А1.
Указанная схема 3 торможения содержит распределитель D4, выполненный с возможностью избирательного воздействия на стопорный штифт привода А1 (первичная фиксирующая система) с обеспечением фиксации закрытого положения заслонки реверсора тяги.
Отметим, что схема 3 торможения выполнена также с возможностью воздействия на третий привод A3 посредством элементов, аналогичных элементам привода А1, причем эти элементы обозначены номерами позиций, аналогичными номерам, относящимся к первому приводу А1, но оканчивающимися цифрой 3: В13, D43, Е13, Е23.
Примечательно, что в соответствии с данным изобретением первичное зубчатое колесо Е23 резьбового штока TF3 приводится во вращение зубчатым колесом Е13, установленным на выходном валу бесщеточного электродвигателя M13.
Таким образом, можно сказать, что управление третьим приводом A3 использует электрическую энергию, в том смысле, что источник энергии, обеспечивающий работу этого привода, является электрическим.
Далее приведено описание функционирования приводной системы, а
также ее преимуществ.
В обычном рабочем режиме для управления тремя приводами А1, А2, A3 используют как гидравлическую схему 1, так и электродвигатель М13, обеспечивающие возможность воздействия, соответственно, на первый привод А1 и третий привод A3, при этом управление вторым приводом А2 обеспечивается при помощи гибких валов F1, F2.
Из уровня техники известно, что перед операцией открытия заслонки реверсора тяги сначала открепляют распределители D4 и D43, используя схему 3, а во время перемещения заслонки реверсора тяги воздействуют на распределители D1 и D13 в соответствии с хорошо определенными методиками с использованием схемы 3 торможения, обеспечивая тем самым точное управление перемещением заслонки реверсора тяги.
В случае возникновения проблемы на первичном источнике гидравлического давления летательного аппарата работа гидравлической схемы 1 может стать некорректной.
В этом случае устранить указанный недостаток позволяет функционирование электродвигателя М13. Данный двигатель, источником энергии для которого является электроэнергия и который поэтому отделен от источника гидравлической энергии летального аппарата, может приводить в действие не только третий A3 привод, но и первый и второй приводы А1 и А2 с помощью гибких валов F1 и F2.
Следует понимать, что предложенная система позволяет поддерживать нормальный режим работы приводов, несмотря на наличие существенной неисправности в первичной гидравлической схеме летательного аппарата. Говоря другими словами, данная система является весьма надежной.
Кроме того, благодаря тому, что каждый из оконечных приводов А1, A3 приводится в действие индивидуальным двигателем, имеется возможность решить проблему поломки гибкого вала F1 или F2.
В подобном случае оставшийся гибкий вал продолжает приводить в действие центральный привод А2 и соответственно таким образом можно обеспечить непрерывную работу трех приводов.
Фиг.2 изображает другой вариант предложенной системы.
Как следует из фиг.2, гидравлическая схема 1 управления и тормозная схема 3 первого привода А1 эквивалентны соответствующим схемам первого варианта изобретения, поэтому их повторное описание не приводится.
Различие заключается в наличии средства управления третьим приводом A3.
В отличие от предыдущего варианта изобретения, в котором управление третьим приводом A3 обеспечивается непосредственно имеющимся в наличии электродвигателем, управление в этом случае обеспечивается гидродвигателем М133, аналогичным тидродвигателю М1 (т.е. двигателем, характеризующимся постоянной частотой вращения и двумя направлениями вращения), при этом энергия на указанный гидродвигатель М133 подается гидравлической схемой 13, содержащей насос Р постоянного объема, приводимый в действие бесщеточным электродвигателем М13, аналогичным электродвигателю из предыдущего варианта изобретения.
Гидравлическая схема 13, по существу, состоит из гидростатического контура, широко используемого в других областях техники, например в подъемных устройствах. Указанная гидравлическая схема 13 содержит, в частности, группу предварительно нагруженных обратных клапанов С13, С23, СЗЗ, С43, фильтр F3 и два распределителя D13, D23.
Следует понимать, что во втором варианте изобретения работу третьего механического привода A3 обеспечивает гидравлическая схема 13, в которой в качестве источника давления используется электроэнергия. Указанное давление получают посредством электродвигателя М13, который полностью независим от источника Н давления первичной гидравлической схемы летательного аппарата.
Таким образом, как и в предыдущем варианте изобретения, в случае отказа первичной гидравлической схемы летательного аппарата резервная гидравлическая схема 13 может продолжать работу автономно с использованием источника электрической энергии, питающей двигатель М13.
Как и в предыдущем варианте изобретения, при нормальном рабочем режиме и первичная гидравлическая схема 1, и резервная гидравлическая схема 13 являются рабочими, так что в этом случае имеется избыточность.
Между этими двумя схемами может быть предусмотрено гидравлическое соединение L, вследствие чего при отказе первичной гидравлической схемы летательного аппарата насос Р может питать не только резервную схему 13, но и первичную схему 1.
Как можно понять на основе предшествующего описания, в данном изобретении предложена система, которая благодаря независимости источников энергии обеспечивает возможность компенсации отказа первичной гидравлической схемы летательного аппарата.
Следует понимать, что объем правовой охраны данного изобретения не ограничиваетсяописанными выше вариантами выполнения.
В частности, данное изобретение может быть также использовано в системах, в которых:
приводы являются механическими, при этом первичная схема использует электрическую энергию и содержит электродвигатель, воздействующий непосредственно на привод, причем вторичная схема использует гидравлическую энергию, действующую на гидродвигатель, воздействующий на другой привод;
приводы являются гидравлическими, при этом первичная схема использует гидравлическую энергию, действующую непосредственно на один из приводов, а вторичная схема использует электрическую энергию и содержит электродвигатель, действующий на гидравлический насос, воздействующий непосредственно на другой привод;
приводы являются гидравлическими, при этом первичная схема использует электрическую энергию, действующую на гидравлический насос, воздействующий в свою очередь на один из приводов, а вторичная схема использует гидравлическую энергию, действующую непосредственно на другой привод.
Принципы данного изобретения, естественно, применимы для случая приведения в действие заслонки реверсора тяги, но в более общем случае они могут использоваться для приведения в действие любых типов подвижных элементов, установленных на гондоле летательного аппарата.
Данное изобретение, в частности, может использоваться для управления приводами двойного действия, т.е. приводами, содержащими шток, обеспечивающий возможность приведения в действие первого подвижного элемента, и второй шток, установленный телескопическим образом на первом штоке и обеспечивающий возможность одновременного приведения в действие второго подвижного элемента.
Подобное конкретное применение является целесообразным, в частности, для комбинированного приведения в действие заслонки реверсора тяги и нижней по потоку ее части, образующей регулируемое сопло, конструкция которого известна из уровня техники, в частности, из патента GB 2446441.
В заключение отметим, что данное изобретение описано для случая трех приводов, однако понятно, что оно может быть распространено на два привода или более чем на три привода.
Система для приведения в действие по меньшей мере одного элемента гондолы летательного аппарата содержит два привода, первичную схему генерации гидравлической или, соответственно, электрической энергии и вторичную схему генерации электрической или, соответственно, гидравлической энергии. Приводы соединены друг с другом кинематическим образом. Первичная схема генерации гидравлической или соответственно электрической энергии предназначена для управления одним из указанных двух приводов, а вторичная схема генерации электрической или, соответственно, гидравлической энергии предназначена для управления другим приводом. Изобретение позволяет повысить надежность системы для приведения в действие элемента гондолы за счет обеспечения разнородного резервирования в системе простой конструкции. 6 з.п. ф-лы, 2 ил.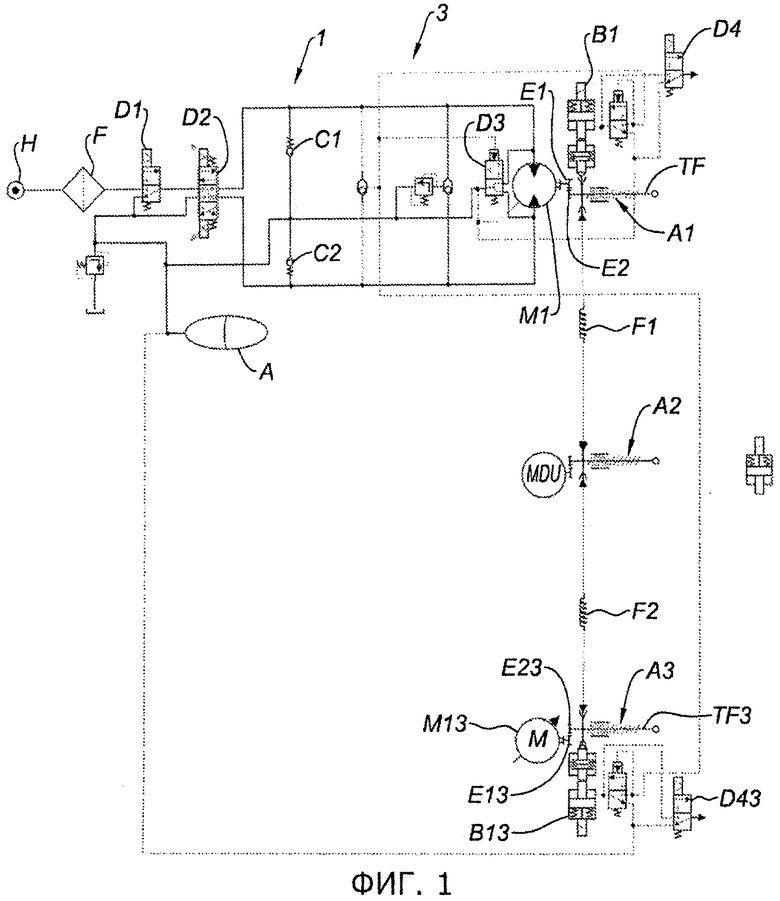
1. Система для приведения в действие по меньшей мере одного элемента гондолы летательного аппарата, содержащая по меньшей мере два привода (А1, А2, A3), соединенные друг с другом кинематическим образом, первичную схему (1) генерации гидравлической или, соответственно, электрической энергии, предназначенную для управления по меньшей мере одним (А1) из указанных двух приводов, и вторичную схему (13) генерации электрической или, соответственно, гидравлической энергии, предназначенную для управления другим приводом (A3).
2. Система по п. 1, в которой указанные приводы (А1, А2, A3) являются механическими, причем указанная первичная схема (1) подает генерируемую гидравлическую энергию на гидродвигатель (М1), который действует на один (А1) из приводов, при этом указанная вторичная схема (13) подает электрическую энергию на электродвигатель (М13), который действует на гидравлический насос (Р), действующий, в свою очередь, на гидродвигатель (М133), который действует на другой привод (A3).
3. Система по п. 1, в которой указанные приводы (А1, А2, A3) являются механическими, причем указанная первичная схема (1) подает генерируемую гидравлическую энергию на гидродвигатель (М1), который действует на один из приводов (А1), при этом указанная вторичная схема (13) подает генерируемую электрическую энергию на электродвигатель (М13), который действует непосредственно на другой привод (A3).
4. Система по п. 1, в которой указанные приводы являются механическими, причем указанная первичная схема подает генерируемую электрическую энергию на электродвигатель, который действует непосредственно на привод, причем указанная вторичная схема подает генерируемую гидравлическую энергию на гидродвигатель, который действует на другой привод.
5. Система по п. 1, в которой указанные приводы являются гидравлическими, причем указанная первичная схема подает генерируемую гидравлическую энергию непосредственно на один из приводов, причем указанная вторичная схема подает генерируемую электрическую энергию на электродвигатель, который действует на гидравлический насос, действующий непосредственно на другой привод.
6. Система по п. 1, в которой указанные приводы являются гидравлическими, причем указанная первичная схема подает генерируемую электрическую энергию на гидравлический насос, который, в свою очередь, действует на один из приводов, причем указанная вторичная схема подает генерируемую гидравлическую энергию непосредственно на другой привод.
7. Система по любому из пп. 1-6, содержащая три привода (А1, А2, A3), соединенные друг с другом кинематическим образом, причем указанная первичная схема (1) генерации гидравлической или соответственно электрической энергии и указанная вторичная схема (13) генерации электрической или соответственно гидравлической энергии соединены соответственно с двумя оконечными приводами (А1, A3) кинематической цепи, образованной указанными тремя приводами (А1, А2, A3).
| EP 1780394 A2, 02.05.2007 | |||
| КОМБИНИРОВАННЫЙ ПРИВОД | 2004 |
|
RU2312794C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕВЕРСОР ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С СИСТЕМОЙ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СТВОРОК | 2003 |
|
RU2323360C2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 6666307 B1, 23.12.2003 | |||
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕВЕРСОР ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С УСТРОЙСТВОМ ПОСТОЯННОГО КОНТРОЛЯ ПОЛОЖЕНИЯ | 2003 |
|
RU2313681C2 |

