Изобретение относится к системам автоматического управления и регулирования, в частности к стабилизаторам вооружения (далее по тексту - СВ) боевых модулей (далее по тексту - БМ) машин типа танков, БМП, БТР и т.п., имеющих в своем составе стабилизатор вооружения, содержащий необходимый набор внешней и внутренней датчиковой аппаратуры, в том числе и датчик(и) линейных ускорений (далее по тексту - ДЛУ) боевого модуля в вертикальной и горизонтальной плоскостях.
Известен стабилизатор танкового вооружения 2Э42-4 БС1.370.012 танка Т-90С, выполненный по схеме электрической принципиальной БС1.370.012 ЭЗ и описанный в БС1.370.012 ТО, ТУ, привод горизонтального наведения (далее по тексту - ГН) которого содержит датчик линейных ускорений БК2.369.147 (см. п.5.4.3 стр.47 и приложение 1, рис.7 БС1.370.012 ТО - описание конструкции).
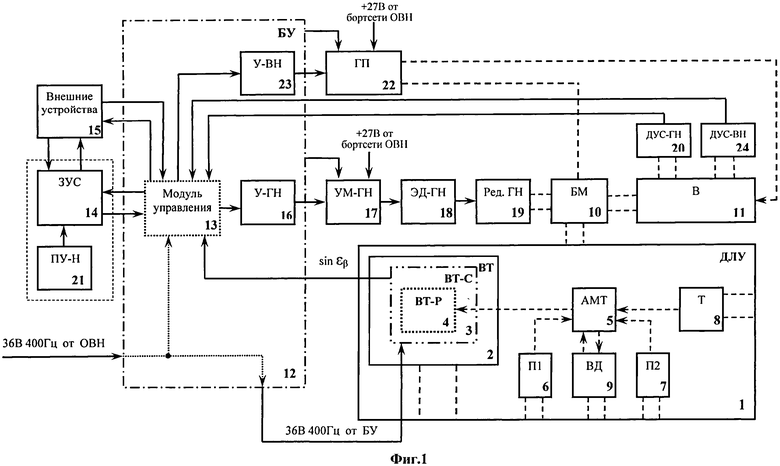
Структурная схема указанного стабилизатора танкового вооружения (далее по тексту - СТВ) изображена на фиг.1. Данный стабилизатор танкового вооружения принят за прототип.
(См. также книгу В.В. Корнеева, М.И. Кузнецова и др. «Основы автоматики и танковые автоматические системы». М., Министерство обороны, 1976 г., издание Академии бронетанковых войск имени маршала Малиновского Р.Я.)
Стабилизатор танкового вооружения состоит из приводов вертикального (далее по тексту - ВН) и горизонтального наведения и стабилизации, привод ГН которого, в свою очередь, содержит датчик линейных ускорений.
Принципы работы приводов ВН и ГН в режимах стабилизации и стабилизированного наведения во многом схожи. Каждый из этих двух приводов представляет собой систему автоматического регулирования, работа которой основана на принципе отработки рассогласования (ошибки), т.е. на сравнении действительного значения регулируемого параметра с его заданным значением.
Стабилизатор вооружения, принятый за прототип, представляет собой автономные приводы по ГН и ВН, обеспечивающие наведение и стабилизацию основного вооружения боевого модуля танка Т-90 в плоскостях ГН и ВН по сигналам, поступающим от задающего устройства стабилизации (далее по тексту - ЗУС). При этом для уменьшения ошибки привода ГН в его контуре дополнительно используется компенсационный сигнал, пропорциональный линейному ускорению БМ в поперечно-вертикальной плоскости, формируемый датчиком линейных ускорений (ДЛУ) 1.
Датчик линейных ускорений (ДЛУ) 1 стабилизатора вооружения-прототипа выполнен в едином корпусе, в котором установлены:
- вращающийся трансформатор (ВТ) 2, состоящий из статора (ВТ-С) 3, жестко связанного с корпусом (ДЛУ) 1, и ротора (ВТ-Р) 4 и представляющий собой электрическую микромашину переменного тока, предназначенную для преобразования угла поворота собственного ротора в переменное напряжение, изменяющееся по синусоидальному закону (sinβ) и пропорциональное линейному ускорению БМ в поперечно-вертикальной плоскости;
- акселерометр маятникового типа (АМТ) 5, ось которого закреплена в подшипниках (П1) 6 и (П2) 7, жестко связанных с корпусом (ДЛУ) 1, обеспечивая тем самым ее вращение относительно корпуса (ДЛУ) 1. С одной стороны ось (АМТ) 5 жестко связана с ротором вращающегося трансформатора (ВТ-Р) 4, а с другой стороны жестко связана с торсионом (Т) 8 заданной жесткости, который, в свою очередь, другим концом жестко связан с корпусом (ДЛУ) 1;
- воздушный демпфер (ВД) 9, жестко связанный с осью (АМТ) 5 и обеспечивающий демпфирование (гашение) колебаний подвижной части (ДЛУ) 1 относительно корпуса (ДЛУ) 1.
Датчик линейных ускорений (ДЛУ) 1 жестко закреплен внутри боевого модуля (БМ) 10 и механически связан через ось цапф с установленным вооружением (В) 11.
Питание первичной обмотки статора (ВТ-С) 3 датчика линейных ускорений (ДЛУ) 1 осуществляется переменным напряжением 36В 400 Гц, формируемым блоком управления (БУ) 12, который, в свою очередь, запитан напряжением 36 В 400 Гц от сети трехфазного напряжения 36В 400 Гц, получаемого от объекта военного назначения (далее по тексту - ОВН).
Сигнал с вторичной обмотки статора (ВТ-С) 3 датчика линейных ускорений (ДЛУ) 1, пропорциональный линейному ускорению БМ в поперечно-вертикальной плоскости (sin εβ), поступает в модуль управления 13 блока управления (БУ) 12 стабилизатора вооружения, где используется в качестве компенсационного сигнала для решения комплексной задачи по повышению точности стабилизации установленного вооружения (В) 11 в плоскости ГН. Напряжение 36В 400 Гц используется в аналоговом модуле управления 13 блока управления (БУ) 12 для обработки сигнала переменного тока от вторичной обмотки статора (ВТ-С) 3 датчика линейных ускорений (ДЛУ) 1.
Режим стабилизации по ГН - режим стабилизации вооружения (В) 11 по ГН осуществляется относительно сигнала датчика положения зеркала по ГН (ЗУС) 14, имеющего независимую стабилизацию зеркала в плоскости ГН, что обеспечивается гиростабилизатором (ЗУС) 14.
При движении танка по пересеченной местности на боевой модуль (БМ) 10 (вооружение (В) 11) действуют внешние возмущения в виде колебаний корпуса танка, трения в погоне боевого модуля (БМ) 10, а также возмущения, обусловленные неуравновешенностью боевого модуля (БМ) 10 относительно оси вращения.
Эти возмущения вызывают отклонение боевого модуля (БМ) 10 (вооружение (В) 11) от заданного сигналом датчика положения зеркала по ГН (ЗУС) 14 направления. Угол между заданным и действительным направлением боевого модуля (БМ) 10 (вооружения (В) 11) в горизонтальной плоскости в этом случае определяет ошибку стабилизации привода ГН.
Полученная таким образом ошибка стабилизации привода ГН, обрабатывается с учетом компенсационного сигнала от датчика линейных ускорений (ДЛУ) 1 и сигналов с внешних устройств 15 аналоговым модулем управления 13 блока управления (БУ) 12, одни сигналы с которого управляют включением привода ГН, а другие сигналы через усилитель (У-ГН) 16 блока управления (БУ) 12 поступают на обмотки управления усилителя мощности ГН (УМ-ГН) 17, представляющего собой электромашинный усилитель, формируя на его обмотках управления разность токов, в соответствии с величиной и знаком которых усилитель мощности ГН (УМ-ГН) 17 вырабатывает напряжение, под действием которого исполнительный электродвигатель (ЭД-ГН) 18 через редуктор (Ред. ГН) 19 поворачивает боевой модуль (БМ) 10 (вооружение (В) 11) танка в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения зеркала по ГН (ЗУС) 14 и истинным положением боевого модуля (БМ) 10 (вооружения (В) 11) в горизонтальной плоскости. Усилитель мощности ГН (УМ-ГН) 17 соединен с бортсетью +27 ОВН.
Для повышения устойчивости привода ГН и, как следствие, получения заданной ошибки стабилизации в контур управления привода ГН стабилизатора введена обратная связь по абсолютной угловой скорости боевого модуля (БМ) 10 (вооружения (В) 11) в плоскости ГН с датчика абсолютной угловой скорости (ДУС-ГН) 20, жестко установленного на вооружении (В) 11, и обрабатываемая аналоговым модулем управления 13 блока управления (БУ) 12.
Управление включением усилителя мощности ГН (УМ-ГН) 17 привода ГН осуществляется по сигналу блока управления (БУ) 12 по команде от внешних устройств 15 и отсутствии блокировок на включение привода ГН.
Режим стабилизированного наведения по ГН - режим стабилизированного наведения боевого модуля (БМ) 10 (вооружения (В) 11) по ГН осуществляется также по сигналу с датчика положения зеркала по ГН (ЗУС) 14. При обнаружении цели наводчик пультом управления (ПУ-Н) 21 наводит стабилизированную в двух плоскостях ВН и ГН линию визирования (прицельную марку) (ЗУС) 14 на цель в плоскости ГН. Сигнал с датчика положения зеркала по ГН (ЗУС) 14, пропорциональный ошибке стабилизации по ГН, поступает на вход (БУ) 12, где происходит его преобразование, как описано выше. Исполнительный электродвигатель (ЭД-ГН) 18 через редуктор (Ред.ГН) 19 поворачивает боевой модуль (БМ) 10 (вооружение (В) 11) танка в сторону уменьшения ошибки по ГН, аналогично рассмотренному выше режиму стабилизации в плоскости ГН.
Другие сигналы с внешних устройств 15, связанные с (ЗУС) 14 и (ПУ-Н) 21, представляют собой сигналы с комплекса приборов и узлов, входящих как в стабилизатор, так и в оборудование танка в целом.
Режим стабилизации по ВН - режим стабилизации вооружения (В) 11 по ВН осуществляется относительно сигнала датчика положения зеркала по ВН (ЗУС) 14, имеющего независимую стабилизацию зеркала в плоскости ВН, что обеспечивается гиростабилизатором (ЗУС) 14.
При движении танка по пересеченной местности на вооружение (В) 11 действуют внешние возмущения в виде колебаний корпуса танка, трения в цапфах (опорах) вооружения (В) 11, трения в исполнительном цилиндре гидропривода ВН (ГП) 22, а также возмущения, обусловленные неуравновешенностью вооружения (В) 11 относительно оси цапф.
Эти возмущения вызывают отклонение вооружения (В) 11 от заданного сигналом датчика положения зеркала по ВН (ЗУС) 14 направления. Угол между заданным и действительным направлением вооружения (В) 11 в вертикальной плоскости в этом случае определяет ошибку стабилизации гидропривода ВН (ГП) 22 привода ВН.
Полученная таким образом ошибка стабилизации привода ВН обрабатывается с учетом сигналов, полученных от внешних устройств 15 аналоговым модулем управления 13 блока управления (БУ) 12 стабилизатора, одни сигналы с которого управляют включением гидронасоса гидропривода ВН (ГП) 22, а другие сигналы через усилитель (У-ВН) 23 поступают на управляющий вход механизма управления исполнительного гидроцилиндра гидропривода ВН (ГП) 22, тем самым обеспечивая поворот вооружения (В) 11 относительно боевого модуля (БМ) 10, в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения зеркала по ВН (ЗУС) 14 и истинным положением вооружения (В) 11 в плоскости ВН. Гидропривод ВН (ГП) 22 соединен с бортсетью +27 ОВН.
Для повышения устойчивости привода ВН и, как следствие, получения заданной ошибки стабилизации в контур управления привода ВН стабилизатора введена обратная связь по абсолютной угловой скорости вооружения (В) 11 в плоскости ВН с датчика абсолютной угловой скорости (ДУС-ВН) 24, жестко установленного на вооружении (В) 11, обрабатываемая аналоговым модулем управления 13 блока управления (БУ) 12.
Управление включением гидропривода ВН (ГП) 22 осуществляется по сигналу блока управления (БУ) 12 по команде от внешних устройств 15 и отсутствии блокировок на включение по приводу ВН.
Режим стабилизированного наведения по ВН - режим стабилизированного наведения вооружения (В) 11 по ВН осуществляется также по сигналу с датчика положения зеркала по ВН (ЗУС) 14. При обнаружении цели наводчик пультом управления (ПУ-Н) 21 наводит стабилизированную в двух плоскостях ВН и ГН линию визирования (прицельную марку) (ЗУС) 14 на цель в плоскости ВН. Сигнал с датчика положения зеркала по ВН (ЗУС) 14, пропорциональный ошибке стабилизации по ВН, поступает на вход блока управления (БУ) 12, где происходит его преобразование, как описано выше. Гидропривод ВН (ГП) 22 поворачивает вооружение (В) 11 относительно боевого модуля (БМ) 10 в сторону уменьшения ошибки по ВН, аналогично рассмотренному выше режиму стабилизации в плоскости ВН.
Недостатками вышеуказанного стабилизатора вооружения-прототипа, имеющего в своем составе датчик линейных ускорений, являются:
- необходимость использования дополнительного источника питания переменного напряжения 36В 400 Гц, что недопустимо в соответствии с требованиями, предъявляемыми к современным СВ;
- плохая помехозащищенность переменного слаботочного сигнала формируемого ВТ ДЛУ из-за наличия большой длины сигнальных цепей между выходным разъемом ДЛУ и схемой обработки сигнала, находящейся в блоке управления СВ;
- недостаточная точность и диапазон измерения ускорения (точность не более 0.1g, что связано с наличием сухого трения в подшипниках акселерометра маятникового типа; диапазон 2g, что связано с механическими параметрами торсиона), что не обеспечивает требования по точности, предъявляемые к современным СВ;
- отсутствие информационных каналов обмена ДЛУ, что не позволяет оперативно и дистанционно проводить его настройку и диагностику в составе СВ объекта военного назначения;
- измерение ускорения ДЛУ только в одной плоскости, что не позволяет вводить обратную связь для повышения точности в плоскости ВН;
- наличие сложной механической части, реализованной в виде воздушного демпфера и необходимой для демпфирования акселерометра маятникового типа;
- наличие собственного низкочастотного резонанса (с экстремумом около 9 Гц), находящегося в рабочей полосе привода ГН, что требует проведения дополнительных мероприятий по повышению его устойчивости.
Техническими задачами заявляемого изобретения являются:
- исключение необходимости использования для работы ДЛУ в составе СВ дополнительного источника питания переменного напряжения 36 В 400 Гц;
- повышение помехозащищенности сигнала, формируемого ДЛУ в составе СВ;
- повышение точности измерения ускорения ДЛУ в составе СВ (до уровня 0,05g) и диапазона измерения ускорения (до 3g);
- введение современных информационных каналов обмена ДЛУ в составе СВ с внешними устройствами;
- повышение эксплуатационной интероперабельности СВ с ДЛУ;
- введение в ДЛУ второго канала измерения ускорения в плоскости ВН;
- исключение воздушного демпфера ДЛУ;
- исключение низкочастотного резонанса ДЛУ.
Для достижения указанного технического результата в известный стабилизатор вооружения боевого модуля (СВ БМ), содержащий внешние устройства, задающее устройство стабилизации (ЗУС), пульт управления наводчика (ПУ-Н), блок управления (БУ), включающий в себя модуль управления, усилитель ВН (У-ВН), усилитель ГН (У-ГН), привод ВН с гидроприводом (ГП), соединенный с бортсетью +27 В ОВН, привод ГН с датчиком линейных ускорений (ДЛУ), жестко связанным с боевым модулем (БМ), усилителем мощности ГН (УМ-ГН), электрически связанным с блоком управления (БУ), бортсетью +27 В ОВН и с исполнительным электродвигателем ГН (ЭД-ГН), который механически связан с редуктором (Ред.ГН), установленным на боевом модуле (БМ) с вооружением (В), с жестко установленными на вооружении (В) датчиками абсолютной угловой скорости по ГН и ВН (ДУС-ГН), (ДУС-ВН) и электрически связанными с модулем управления блока управления (БУ), отличающийся тем, что в него дополнительно введены первая последовательная шина (ПШ1), электрически соединенная с блоком управления (БУ) и датчиком линейных ускорений (ДЛУ), а в датчик линейных ускорений (ДЛУ) дополнительно введены:
- модуль питания датчика линейных ускорений (МП);
- акселерометр твердотельный ГН (АТ-ГН);
- акселерометр твердотельный ВН (АТ-ВН);
- контроллер (К), включающий в себя:
- модуль аналого-цифрового преобразования ГН (АЦП-ГН);
- модуль аналого-цифрового преобразования ВН (АЦП-ВН);
- тактовый генератор (ТГ);
- модуль вычисления ускорений (MB);
- блок компенсации неточности измерения ускорения (БК);
- постоянное запоминающее устройство (ПЗУ);
- модуль базового адреса датчика линейных ускорений (БА);
- формирователь сигналов последовательной шины канала типа CAN (ФСПШ
CAN);
причем чувствительные элементы ускорения реализованы на базе твердотельных акселерометров, жестко связаны с корпусом (ДЛУ) и установлены с осями чувствительности соответственно в плоскостях ГН и ВН,
при этом акселерометр (АТ-ГН) электрически соединен с модулем аналого-цифрового преобразования ГН (АЦП-ГН) контроллера (К), акселерометр (АТ-ВН) электрически соединен с модулем аналого-цифрового преобразования ВН (АЦП-ВН) контроллера (К), тактовый генератор (ТГ) контроллера (К) соединен с модулем аналого-цифрового преобразования ГН (АЦП-ГН) и модулем аналого-цифрового преобразования ВН (АЦП-ВН), которые, в свою очередь, соединены с модулем вычисления ускорений (MB) контроллера (К), в свою очередь, выход модуля вычисления ускорений (MB) соединен с формирователем сигналов последовательной шины, например, канала типа CAN (ФСПШ CAN),
в свою очередь, первый выход постоянного запоминающего устройства (ПЗУ) соединен с формирователем сигналов последовательной шины, например, канала типа CAN (ФСПШ CAN), второй его выход соединен с модулем вычисления ускорений (MB), третий его выход соединен с блоком компенсации неточности измерения ускорения (БК), который связан с модулем вычисления ускорений (MB) контроллера (К) датчика линейных ускорений,
при этом вход модуля базового адреса датчика линейных ускорений (БА) электрически связан с блоком управления (БУ) стабилизатора вооружения боевого модуля (СВ БМ), выход модуля базового адреса датчика линейных ускорений (БА) соединен с формирователем сигналов последовательной шины, например, канала типа CAN (ФСПШ CAN),
в свою очередь, модуль питания датчика линейных ускорений (МП) электрически соединен с контроллером (К), акселерометром (АТ-ГН), акселерометром (АТ-ВН) и выходом блока управления (БУ) стабилизатора вооружения боевого модуля (СВ БМ),
при этом формирователь сигналов последовательной шины, например, канала типа CAN (ФСПШ CAN) электрически соединен с первой последовательной шиной (ПШ1) стабилизатора вооружения боевого модуля (СВ БМ), первая последовательная шина (ПШ1), в свою очередь, электрически соединена с цифровым модулем управления блока управления (БУ) стабилизатора вооружения боевого модуля (СВ БМ).
Сопоставительный анализ с прототипом показывает, что в заявляемый стабилизатор вооружения боевого модуля (СВ БМ) с датчиком линейных ускорений (ДЛУ) введены новые компоненты, а именно:
- первая последовательная шина (ПШ1),
а в датчик линейных ускорений дополнительно введены:
- модуль питания датчика линейных ускорений (МП);
- акселерометр твердотельный ГН (АТ-ГН);
- акселерометр твердотельный ВН (АТ-ВН);
- контроллер (К), включающий в себя:
- модуль аналого-цифрового преобразования ГН (АЦП-ГН);
- модуль аналого-цифрового преобразования ВН (АЦП-ВН);
- тактовый генератор (ТГ);
- модуль вычисления ускорений (MB);
- блок компенсации неточности измерения ускорения (БК);
- постоянное запоминающее устройство (ПЗУ);
- модуль базового адреса датчика линейных ускорений (БА);
- формирователь сигналов последовательной шины канала типа CAN (ФСПШ CAN);
и соответственно их связи с другими элементами стабилизатора вооружения боевого модуля (СВ БМ) и ОВН.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в заявляемый стабилизатор вооружения боевого модуля (СВ БМ) с датчиком линейных ускорений (ДЛУ) позволяет:
- исключить необходимость использования для работы датчика линейных ускорений (ДЛУ) в составе СВ БМ дополнительного источника питания переменного напряжения 36В 400 Гц за счет использования в датчике линейных ускорений чувствительных элементов на базе твердотельных акселерометров, использующих для питания напряжение ±15 В, вырабатываемое собственным модулем питания (МП) из напряжения +27 В бортовой сети, поступающего из блока управления (БУ);
- повысить помехозащищенность сигнала, формируемого датчиком линейных ускорений (ДЛУ) в составе СВ БМ за счет местной (внутренней) обработки слаботочных аналоговых сигналов, формируемых акселерометрами ГН и ВН с последующей передачей значения ускорения в плоскостях ГН и ВН с использованием последовательной шины передачи данных типа CAN, которая, в свою очередь, менее подвержена внешнему воздействию, чем передача слаботочных аналоговых сигналов;
- повысить точность измерения и увеличить диапазон измеряемых ускорений (с целью увеличения динамического диапазона применения компенсационного сигнала и за счет этого повышение точности стабилизации не менее чем на 10%) датчиком линейных ускорений (ДЛУ) в составе СВ БМ за счет:
- использования в ДЛУ твердотельных акселерометров повышенной точности (не менее 0,05g) с заданным диапазоном измерения (не менее 3g),
- исключения низкочастотного резонанса конструкции ДЛУ, что позволяет расширить рабочую полосу его работы в составе привода ГН, что позволяет поднять устойчивость всего привода ГН в целом;
- используя заложенные в контроллере (К) датчика линейных ускорений (ДЛУ) алгоритмы обработки сигналов с использованием корректирующих функций, получить дискретность младшего значащего разряда, соответствующую 0,001g;
- ввести современный информационный канал обмена и передачи данных типа CAN в СВ БМ с датчиком линейных ускорений (ДЛУ);
- повысить эксплуатационную интероперабельность СВ БМ с датчиком линейных ускорений (ДЛУ) за счет:
- введения высокоскоростного цифрового информационного канала обмена данных типа CAN, что в свою очередь позволяет повысить функциональные и эксплуатационные характеристики СВ БМ системы управления вооружением с примененным датчиком линейных ускорений (ДЛУ), а также дает возможность установки СВ БМ с датчиком линейных ускорений (ДЛУ) на другие ОВН без существенной их доработки и в сжатые сроки;
- введения во внутреннюю структуру СВ БМ с датчиком линейных ускорений (ДЛУ) цифрового информационного канала обмена типа CAN, позволяющего проводить настройку и диагностику СВ БМ с датчиком линейных ускорений (ДЛУ) при помощи встроенных средств, а также автоматически устанавливать из СВ БМ адрес датчика линейных ускорений (ДЛУ);
- записи в постоянное запоминающее устройство (ПЗУ) ДЛУ в составе СВ БМ его собственной служебной информации (наименование датчика, версия программного обеспечения, заводской номер, коды ошибок и т.д.), что позволяет по запросу от СВ БМ и системы управления вооружением выдавать указанную информацию о датчике на видеосмотровое(ые) устройство(а) оператора(ов);
- введение в ДЛУ второго канала измерения ускорения в плоскости ВН позволяет ввести дополнительную компенсационную обратную связь в привод ВН, что позволяет дополнительно повысить точность стабилизации в плоскости ВН не менее чем на 15%;
- повысить надежность и технологичность конструкции ДЛУ за счет исключения воздушного демпфера.
Заявляемое изобретение и обеспечиваемые им технические результаты позволяют улучшить технические и эксплуатационные характеристики стабилизатора вооружения (СВ) боевых модулей указанных выше боевых машин и боевых модулей дистанционно-управляемых систем вооружения, решить вопросы по их оперативной настройке и диагностике, а также диагностике датчика линейных ускорений (ДЛУ) в составе СВ БМ.
Устройство и работа заявляемого изобретения поясняются графическими материалами.
На фиг.1 приведена структурная схема СВ с датчиком линейных ускорений (ДЛУ)-прототипа; на фиг.2 приведена заявляемая структурная схема СВ с датчиком линейных ускорений (ДЛУ).
Сокращения, принятые в тексте и на фиг.1 и фиг.2:
АМТ - акселерометр маятникового типа;
АТ-ВН - акселерометр твердотельный ВН;
АТ-ГН - акселерометр твердотельный ГН;
АЦП-ВН - модуль аналого-цифрового преобразования ВН;
АЦП-ГН - модуль аналого-цифрового преобразования ГН;
БА - модуль базового адреса датчика линейных ускорений;
БК - блок компенсации неточности измерения ускорения;
БМ - боевой модуль;
БМП - боевая машина пехоты;
БТР - бронетранспортер;
БУ - блок управления стабилизатора вооружения;
В - установленное вооружение;
ВД - воздушный демпфер;
ВН - вертикальное наведение;
ВТ - вращающийся трансформатор;
ВТ-С - статор вращающегося трансформатора;
ВТ-Р - ротор вращающегося трансформатора;
ГН - горизонтальное наведение;
ГП - гидропривод ВН;
ДЛУ - датчик линейных ускорений;
ДУС-ВН - датчик абсолютной угловой скорости по ВН;
ДУС-ГН - датчик абсолютной угловой скорости по ГН;
ЗУС - задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН;
К - контроллер;
MB - модуль вычисления ускорений;
МП - модуль питания датчика линейных ускорений;
ОВН - объект военного назначения;
П1 - первый подшипник;
П2 - второй подшипник;
ПЗУ - постоянное запоминающее устройство;
ПУ-Н - пульт управления наводчика;
ПШ1 - первая последовательная шина;
Ред.ГН - редуктор ГН;
СВ - стабилизатор вооружения;
СВ БМ - стабилизатор вооружения боевого модуля;
СУСВ - система управления и стабилизации вооружения;
Т - торсион;
ТГ - тактовый генератор;
У-ВН - усилитель ВН;
У-ГН - усилитель ГН;
УМ-ГН - усилитель мощности ГН;
ФСПШ CAN - формирователь сигналов последовательной шины канала типа CAN;
ЭД-ГН- электродвигатель ГН;
sin εβ - электрический сигнал с синусной обмотки вращающегося трансформатора в поперечно-вертикальном направлении, используемый в приводе ГН;
εα - электрический сигнал измеренного ускорения БМ в продольно-вертикальном направлении для привода ВН;
εβ - электрический сигнал измеренного ускорения БМ в поперечно-вертикальном направлении для привода ГН;
Стабилизатор вооружения, содержащий приводы ВН и ГН системы управления и стабилизации вооружения боевого модуля, включает в себя
датчик линейных ускорений (ДЛУ) 1, содержащий контроллер (К) 2, выполненный в виде печатной платы, установленной в корпусе (ДЛУ) 1, модуль питания (МП) 3 обеспечивает питание электрически связанных с ним контроллера (К) 2 и твердотельных акселерометров ГН (АТ-ГН) 4 и ВН (АТ-ВН) 5, жестко установленных на корпусе (ДЛУ) 1, и, в свою очередь, электрически связанных соответственно с модулем аналого-цифрового преобразования ГН (АЦП-ГН) 6 и модулем аналого-цифрового преобразования ВН (АЦП-ВН) 7 контроллера (К) 2.
Тактовый генератор (ТГ) 8 контроллера (К) 2 генерирует электрические импульсы прямоугольной формы с заданной частотой и необходим для синхронизации работы соединенных с ним модулей аналого-цифрового преобразования ГН (АЦП-ГН) 6 и ВН (АЦП-ВН) 7.
Выходы модулей аналого-цифрового преобразования ГН (АЦП-ГН) 6 и ВН (АЦП-ВН) 7 соединены с модулем вычисления ускорений (MB) 9, выход модуля вычисления ускорений (MB) 9 соединен с формирователем сигналов последовательной шины канала типа CAN (ФСПШ CAN) 10.
Первый выход постоянного запоминающего устройства (ПЗУ) 11 соединен с формирователем сигналов последовательной шины канала типа CAN (ФСПШ CAN) 10, второй его выход соединен с модулем вычисления ускорений (MB) 9, третий его выход соединен с блоком компенсации неточности измерения ускорения (БК) 12, который связан с модулем вычисления ускорений (MB) 9 контроллера (К) 2.
Выход модуля базового адреса датчика линейных ускорений (БА) 13 соединен с формирователем сигналов последовательной шины канала типа CAN (ФСПШ CAN) 10, контроллера (К) 2.
Формирователь сигналов последовательной шины канала типа CAN (ФСПШ CAN) 10 контроллера (К) 2 электрически соединен с первой последовательной шиной (ПШ1) 14 стабилизатора вооружения (СВ), представляющей собой линию передачи сигналов последовательного протокола типа CAN.
Датчик линейных ускорений (ДЛУ) 1 жестко связан с боевым модулем (БМ) 15 и механически связан через ось цапф с установленным вооружением (В) 16.
Первая последовательная шина (ПШ1) 14 электрически соединена с цифровым модулем управления 17 блока управления (БУ) 18 стабилизатора вооружения боевого модуля (СВ БМ).
Первый выход блока управления (БУ) 18 электрически связан с модулем базового адреса (БА) 13 контроллера (К) 2 датчика линейных ускорений (ДЛУ) 1. Модуль базового адреса 13 представляет собой устройство, позволяющее проводить однозначную идентификацию датчика линейных ускорений (ДЛУ) 1 в составе системы управления стабилизации вооружения (СУСВ).
Блок управления (БУ) 18 стабилизатора вооружения боевого модуля (СВ БМ) электрически соединен с бортовой сетью +27 В ОВН и подает питание цепи «+27 В от БУ» на модуль питания датчика линейных ускорений (МП) 3. Напряжение 36В 400 Гц от ОВН поступает в модуль управления 17 блока управления (БУ) 18 и используется для обработки сигналов переменного тока.
Задающее устройство стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН (ЗУС) 19 электрически связано с внешними устройствами 20 и цифровым модулем управления 17 блока управления (БУ) 18. Электрические сигналы с (ЗУС) 19 и внешних устройств 20 связаны с цифровым модулем управления 17 блока управления (БУ) 18, сигналы с которого через усилитель (У-ГН) 21 блока управления (БУ) 18 поступают на вход управления усилителя мощности ГН (УМ-ГН) 22, который, в свою очередь, связан по цепям включения с блоком управления (БУ) 18 и с цепью бортсети +27 ОВН. Усилитель мощности ГН (УМ-ГН) 22 вырабатывает напряжение, под действием которого исполнительный электродвигатель (ЭД-ГН) 23 через редуктор (Ред.ГН) 24 поворачивает боевой модуль (БМ) 15 вооружения (В) 16).
Датчик абсолютной угловой скорости по ГН (ДУС-ГН) 25, жестко установлен на вооружении (В) 16 и электрически связан с цифровым модулем управления 17 блока управления (БУ) 18.
Пульт управления (ПУ-Н) 26 электрически связан с задающим устройством стабилизации с датчиками положения независимо стабилизированного в пространстве инерциального объекта по ГН и ВН (ЗУС) 19 и служит для наведения стабилизированной в двух плоскостях ВН и ГН линии визирования (прицельной марки).
Электрический сигнал с блока управления (БУ) 18 управляет включением гидронасоса гидропривода ВН (ГП) 27, а сигнал из цифрового модуля управления 17 блока управления (БУ) 18 через усилитель (У-ВН) 28 поступает на управляющий вход механизма управления исполнительного гидроцилиндра гидропривода ВН (ГП) 27, тем самым, обеспечивая поворот вооружения (В) 16 относительно боевого модуля (БМ) 15. Гидропривод ВН (ГП) 27 соединен с бортсетью +27 ОВН.
Датчик абсолютной угловой скорости по ВН (ДУС-ВН) 29 жестко установлен на вооружении (В) 16 и электрически связан с цифровым модулем управления 17 блока управления (БУ) 18.
Режимы работы стабилизатора вооружения боевого модуля.
Режим стабилизации по ГН - режим стабилизации вооружения (В) 16 по ГН осуществляется относительно сигнала датчика положения зеркала по ГН (ЗУС) 19, имеющего независимую стабилизацию зеркала в плоскости ГН, что обеспечивается гиростабилизатором (ЗУС) 19.
При движении танка по пересеченной местности на боевой модуль (БМ) 15 (вооружение (В) 16) действуют внешние возмущения в виде колебаний корпуса танка, трения в погоне боевого модуля (БМ) 15, а также возмущения, обусловленные неуравновешенностью боевого модуля (БМ) 15 относительно оси вращения.
Эти возмущения вызывают отклонение боевого модуля (БМ) 15 (вооружения (В) 16) от заданного сигналом датчика положения зеркала по ГН (ЗУС) 19 направления. Угол между заданным и действительным направлением боевого модуля (БМ) 15 (вооружения (В) 16) в горизонтальной плоскости в этом случае определяет ошибку стабилизации привода ГН.
Полученная таким образом ошибка стабилизации привода ГН обрабатывается с учетом компенсационного сигнала от акселерометра ГН (АТ-ГН) 4 датчика линейных ускорений (ДЛУ) 1 и сигналов с внешних устройств 20 цифровым модулем управления 17 блока управления (БУ) 18 стабилизатора вооружения, одни сигналы с которого управляют включением привода ГН, а другие сигналы через усилитель (У-ГН) 21 блока управления (БУ) 18 поступают на вход управления усилителя мощности ГН (УМ-ГН) 22, представляющего собой электронный усилитель, который вырабатывает напряжение, под действием которого исполнительный электродвигатель (ЭД-ГН) 23 через редуктор (Ред.ГН) 24 поворачивает боевой модуль (БМ) 15 (вооружение (В) 16) танка в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения зеркала по ГН (ЗУС) 19 и истинным положением боевого модуля (БМ) 15 (вооружения (В) 16) в горизонтальной плоскости. Усилитель мощности ГН (УМ-ГН) 22 соединен с бортсетью +27 В ОВН.
Для повышения устойчивости привода ГН и, как следствие, получения заданной ошибки стабилизации в контур управления привода ГН стабилизатора введена обратная связь по абсолютной угловой скорости боевого модуля (БМ) 15 (вооружения (В) 16) в плоскости ГН с датчика абсолютной угловой скорости (ДУС-ГН) 25, жестко установленного на вооружении (В) 16, и обрабатываемая цифровым модулем управления 17 блока управления (БУ) 18.
Режим стабилизированного наведения по ГН - режим стабилизированного наведения боевого модуля (БМ) 15 (вооружения (В) 16) по ГН осуществляется также по сигналу с датчика положения зеркала по ГН (ЗУС) 19. При обнаружении цели наводчик пультом управления (ПУ-Н) 26 наводит стабилизированную в двух плоскостях ВН и ГН линию визирования (прицельную марку) (ЗУС) 19 на цель в плоскости ГН. Сигнал с датчика положения зеркала по ГН (ЗУС) 19, пропорциональный ошибке стабилизации по ГН, поступает на вход (БУ) 18, где происходит его преобразование, как описано выше. Исполнительный электродвигатель (ЭД-ГН) 23 через редуктор (Ред.ГН) 24 поворачивает боевой модуль (БМ) 15 (вооружение (В) 16) танка в сторону уменьшения ошибки по ГН, аналогично рассмотренному выше режиму стабилизации в плоскости ГН.
Другие сигналы с внешних устройств 20, связанные с (ЗУС) 19 и (ПУ-Н) 26, представляют собой сигналы с комплекса приборов и узлов, входящих как в стабилизатор вооружения, так и в оборудование танка в целом.
Режим стабилизации по ВН - режим стабилизации вооружения (В) 16 по ВН осуществляется относительно сигнала датчика положения зеркала по ВН (ЗУС) 19, имеющего независимую стабилизацию зеркала в плоскости ВН, что обеспечивается гиростабилизатором (ЗУС) 19.
При движении танка по пересеченной местности на вооружение (В) 16 действуют внешние возмущения в виде колебаний корпуса танка, трения в цапфах (опорах) вооружения (В) 16, трения в исполнительном цилиндре гидропривода ВН (ГП) 27, а также возмущения, обусловленные неуравновешенностью вооружения (В) 16 относительно оси цапф.
Эти возмущения вызывают отклонение вооружения (В) 16 от заданного сигналом датчика положения зеркала по ВН (ЗУС) 19 направления. Угол между заданным и действительным направлением вооружения (В) 16 в вертикальной плоскости, в этом случае, определяет ошибку стабилизации гидропривода ВН (ГП) 27 привода ВН.
Полученная таким образом ошибка стабилизации гидропривода ВН (ГП) 27 привода ВН обрабатывается с учетом компенсационного сигнала от акселерометра ВН (АТ-ВН) 5 датчика линейных ускорений (ДЛУ) 1 и сигналов с внешних устройств 20 цифровым модулем управления 17 блока управления (БУ) 18 стабилизатора, одни сигналы с которого управляют включением гидронасоса гидропривода ВН (ГП) 27, а другие сигналы через усилитель (У-ВН) 28 поступают на управляющий вход механизма управления исполнительного гидроцилиндра гидропривода ВН (ГП) 27, тем самым обеспечивая поворот вооружения (В) 16 относительно боевого модуля (БМ) 15 в направлении уменьшения рассогласования между заданным значением сигнала с датчика положения зеркала по ВН (ЗУС) 19 и истинным положением вооружения (В) 16 в плоскости ВН. Гидропривод ВН (ГП) 27 соединен с бортсетью +27 В ОВН.
Для повышения устойчивости привода ВН и, как следствие, получения заданной ошибки стабилизации в контур управления привода ВН стабилизатора введена обратная связь по абсолютной угловой скорости вооружения (В) 16 в плоскости ВН с датчика абсолютной угловой скорости (ДУС-ВН) 29, жестко установленного на вооружении (В) 16, обрабатываемая цифровым модулем управления 17 блока управления (БУ) 18.
Режим стабилизированного наведения по ВН - режим стабилизированного наведения вооружения (В) 16 по ВН осуществляется также по сигналу с датчика положения зеркала по ВН (ЗУС) 19. При обнаружении цели наводчик пультом управления (ПУ-Н) 26 наводит стабилизированную в двух плоскостях ВН и ГН линию визирования (прицельную марку) (ЗУС) 19 на цель в плоскости ВН. Сигнал с датчика положения зеркала по ВН (ЗУС) 19, пропорциональный ошибке стабилизации по ВН, поступает на вход блока управления (БУ) 18, где происходит его преобразование, как описано выше. Гидропривод ВН (ГП) 27 поворачивает вооружение (В) 16, относительно боевого модуля (БМ) 15, в сторону уменьшения ошибки по ВН, аналогично рассмотренному выше режиму стабилизации в плоскости ВН.
Большинство новых элементов заявляемого СВ БМ с датчиком линейных ускорений реализованы как часть программного обеспечения контроллера блока управления СВ БМ и контроллера датчика линейных ускорений, при этом обработка получаемых и передаваемых данных осуществляется модулями контроллера, такими как модули аналого-цифрового преобразования и цифро-аналогового преобразования, модуль вычисления ускорения датчика линейных ускорений и модулей формирователей сигналов последовательной шины типа CAN.
(См. книгу под редакцией Богнера Р. и Константинидиса А. «Введение в цифровую фильтрацию». Пер. с англ.- М.: Мир, 1976).
(См. книгу Хоровиц П., Хилл У. «Искусство схемотехники». Пер. с англ. - 4-е изд., перераб. и доп. - М.: Мир, 1993).
(См. книгу Войтицкий С.А., Войтицкая Г.Н. Аналого-цифровой преобразователь сигналов синусно-косинусного вращающегося трансформатора в опорно-поворотном устройстве малогабаритной РЛС наземного базирования // Вестник Тульского государственного университета. Сер. Системы управления. 2010. Вып.1).
(См. Оппенгейм А., Шафер Р. Цифровая обработка сигналов. М.: Техносфера, 2006. 856 с.).
Таким образом, заявляемый в качестве изобретения СВ БМ с датчиком линейных ускорений системы управления и стабилизации вооружения позволяет:
- исключить необходимость использования для работы датчика линейных ускорений (ДЛУ) в составе СВ БМ дополнительного источника питания переменного напряжения 36 В 400 Гц за счет использования в датчике линейных ускорений чувствительных элементов на базе твердотельных акселерометров, использующих для питания напряжение ±15 В, вырабатываемое собственным модулем питания (МП) из напряжения +27 В бортовой сети, поступающего из блока управления (БУ);
- повысить помехозащищенность сигнала, формируемого датчиком линейных ускорений (ДЛУ) в составе СВ БМ, за счет местной (внутренней) обработки слаботочных аналоговых сигналов, формируемых акселерометрами ГН и ВН, с последующей передачей значения ускорения в плоскостях ГН и ВН с использованием последовательной шины передачи данных типа CAN, которая, в свою очередь, менее подвержена внешнему воздействию, чем передача слаботочных аналоговых сигналов;
- повысить точность измерения и увеличить диапазон измеряемых ускорений (с целью увеличения динамического диапазона применения компенсационного сигнала и за счет этого повышения точности стабилизации не менее чем на 10%) датчиком линейных ускорений (ДЛУ) в составе СВ БМ за счет:
- использования в ДЛУ твердотельных акселерометров повышенной точности (не менее 0,05g) с заданным диапазоном измерения (не менее 3g),
- исключения низкочастотного резонанса конструкции ДЛУ, что позволяет расширить рабочую полосу его работы в составе привода ГН, что позволяет поднять устойчивость всего привода ГН в целом;
- используя заложенные в контроллере (К) датчика линейных ускорений (ДЛУ) алгоритмы обработки сигналов с использованием корректирующих функций, получить дискретность младшего значащего разряда соответствующую 0,001 g;
- ввести современный информационный канал обмена и передачи данных типа CAN в СВ БМ с датчиком линейных ускорений (ДЛУ);
- повысить эксплуатационную интероперабельность СВ БМ с датчиком линейных ускорений (ДЛУ) за счет:
- введения высокоскоростного цифрового информационного канала обмена данных типа CAN, что, в свою очередь, позволяет повысить функциональные и эксплуатационные характеристики СВ БМ системы управления вооружением с примененным датчиком линейных ускорений (ДЛУ), а также дает возможность установки СВ БМ с датчиком линейных ускорений (ДЛУ) на другие ОВН без существенной их доработки и в сжатые сроки;
- введения во внутреннюю структуру СВ БМ с датчиком линейных ускорений (ДЛУ) цифрового информационного канала обмена типа CAN, позволяющего проводить настройку и диагностику СВ БМ с датчиком линейных ускорений (ДЛУ) при помощи встроенных средств, а также автоматически устанавливать из СВ БМ адрес датчика линейных ускорений (ДЛУ);
- записи в постоянное запоминающее устройство (ПЗУ) ДЛУ в составе СВ БМ его собственной служебной информации (наименование датчика, версия программного обеспечения, заводской номер, коды ошибок и т.д.), что позволяет по запросу от СВ БМ и системы управления вооружением выдавать указанную информацию о датчике на видеосмотровое(ые) устройство(а) оператора(ов);
- введение в ДЛУ второго канала измерения ускорения в плоскости ВН позволяет ввести дополнительную компенсационную обратную связь в привод ВН, что позволяет дополнительно повысить точность стабилизации в плоскости ВН не менее чем на 15%;
- повысить надежность и технологичность конструкции ДЛУ за счет исключения воздушного демпфера.
Таким образом, поставленные в заявке технические задачи достигнуты.
Приведенные в описании технические преимущества, целесообразность и надежность стабилизатора вооружения боевого модуля, реализованного по заявляемой структурной схеме, подтверждены испытаниями опытного образца СВ БМ на испытательной базе ОАО «СКБ ПА» и ОАО «КЭМЗ» г. Ковров, ОАО «УКБТМ» и ОАО «НПК Уралвагонзавод» г. Нижний Тагил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2552877C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2550379C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ | 2014 |
|
RU2555184C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМОГО БОЕВОГО МОДУЛЯ | 2016 |
|
RU2629732C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2548941C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2014 |
|
RU2553712C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2682086C1 |
| СИСТЕМА НАВЕДЕНИЯ, СТАБИЛИЗАЦИИ И УПРАВЛЕНИЯ ВООРУЖЕНИЕМ БОЕВОЙ МАШИНЫ | 2018 |
|
RU2789421C1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2014 |
|
RU2550407C1 |
Изобретение относится к области вооружения и военной техники и может найти применение в системах стабилизации вооружения боевых модулей (СВ БМ) машин типа танков, БМП, БТР, БРДМ и т.п. Технический результат - расширение функциональных возможностей. Для этого в стабилизатор вооружения боевого модуля дополнительно введены: первая последовательная шина (ПШ1); в датчик линейных ускорений введены: модуль питания датчика линейных ускорений (МП); акселерометр твердотельный ГН (АТ-ГН); акселерометр твердотельный ВН (АТ-ВН); контроллер (К), включающий в себя: модуль аналого-цифрового преобразования ГН (АЦП-ГН); модуль аналого-цифрового преобразования ВН (АЦП-ВН); тактовый генератор (ТГ); модуль вычисления ускорений (MB); блок компенсации неточности измерения ускорения (БК); постоянное запоминающее устройство (ПЗУ); модуль базового адреса датчика линейных ускорений (БА); формирователь сигналов последовательной шины канала типа CAN (ФСПШ CAN) и соответственно их связи с другими компонентами СВ БМ. 2 ил.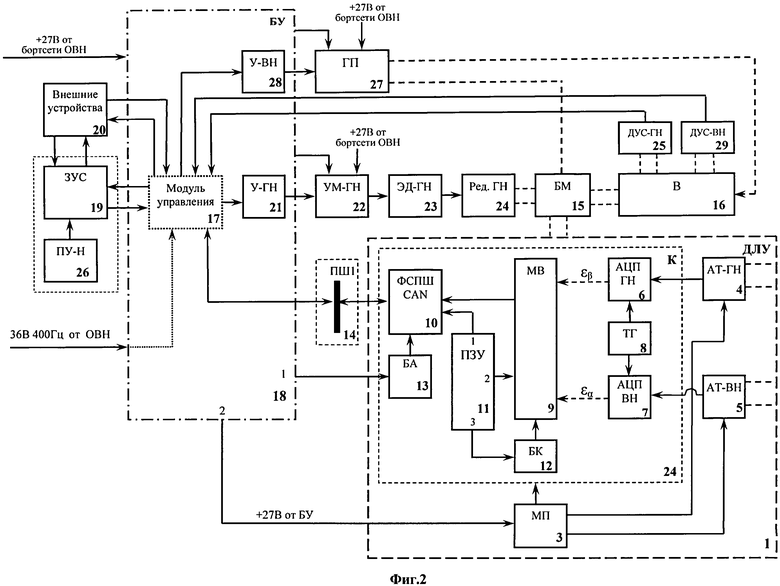
Стабилизатор вооружения боевого модуля (СВ БМ), содержащий внешние устройства, задающее устройство стабилизации (ЗУС), пульт управления наводчика (ПУ-Н), блок управления (БУ), включающий в себя модуль управления, усилитель ВН (У-ВН), усилитель ГН (У-ГН), привод ВН с гидроприводом (ГП), соединенный с бортсетью +27 В объекта военного назначения (ОВН), привод ГН с датчиком линейных ускорений (ДЛУ), жестко связанным с боевым модулем (БМ), усилителем мощности ГН (УМ-ГН), электрически связанным с блоком управления (БУ), бортсетью +27 В ОВН и с исполнительным электродвигателем ГН (ЭД-ГН), который механически связан с редуктором (Ред.ГН), установленным на боевом модуле (БМ) с вооружением (В), с жестко установленными на вооружении (В) датчиками абсолютной угловой скорости по ГН и ВН (ДУС-ГН), (ДУС-ВН) и электрически связанными с модулем управления блока управления (БУ), отличающийся тем, что в него дополнительно введены первая последовательная шина (ПШ1), электрически соединенная с блоком управления (БУ) и датчиком линейных ускорений (ДЛУ), а в датчик линейных ускорений (ДЛУ) дополнительно введены:
- модуль питания датчика линейных ускорений (МП);
- акселерометр твердотельный ГН (АТ-ГН);
- акселерометр твердотельный ВН (АТ-ВН);
- контроллер (К), включающий в себя:
- модуль аналого-цифрового преобразования ГН (АЦП-ГН);
- модуль аналого-цифрового преобразования ВН (АЦП-ВН);
- тактовый генератор (ТГ);
- модуль вычисления ускорений (MB);
- блок компенсации неточности измерения ускорения (БК);
- постоянное запоминающее устройство (ПЗУ);
- модуль базового адреса датчика линейных ускорений (БА);
- формирователь сигналов последовательной шины канала типа CAN (ФСПШ CAN);
причем чувствительные элементы ускорения реализованы на базе твердотельных акселерометров, жестко связаны с корпусом (ДЛУ) и установлены с осями чувствительности соответственно в плоскостях ГН и ВН,
при этом акселерометр (АТ-ГН) электрически соединен с модулем аналого-цифрового преобразования ГН (АЦП-ГН) контроллера (К), акселерометр (АТ-ВН) электрически соединен с модулем аналого-цифрового преобразования ВН (АЦП-ВН) контроллера (К), тактовый генератор (ТГ) контроллера (К) соединен с модулем аналого-цифрового преобразования ГН (АЦП-ГН) и модулем аналого-цифрового преобразования ВН (АЦП-ВН), которые, в свою очередь, соединены с модулем вычисления ускорений (MB) контроллера (К), в свою очередь, выход модуля вычисления ускорений (MB) соединен с формирователем сигналов последовательной шины, например, канала типа CAN (ФСПШ CAN),
в свою очередь, первый выход постоянного запоминающего устройства (ПЗУ) соединен с формирователем сигналов последовательной шины, например, канала типа CAN (ФСПШ CAN), второй его выход соединен с модулем вычисления ускорений (MB), третий его выход соединен с блоком компенсации неточности измерения ускорения (БК), который связан с модулем вычисления ускорений (MB) контроллера (К) датчика линейных ускорений,
при этом вход модуля базового адреса датчика линейных ускорений (БА) электрически связан с блоком управления (БУ) стабилизатора вооружения боевого модуля (СВ БМ), выход модуля базового адреса датчика линейных ускорений (БА) соединен с формирователем сигналов последовательной шины, например, канала типа CAN (ФСПШ CAN),
в свою очередь, модуль питания датчика линейных ускорений (МП) электрически соединен с контроллером (К), акселерометром (АТ-ГН), акселерометром (АТ-ВН) и выходом блока управления (БУ) стабилизатора вооружения боевого модуля (СВ БМ),
при этом формирователь сигналов последовательной шины, например, канала типа CAN (ФСПШ CAN) электрически соединен с первой последовательной шиной (ПШ1) стабилизатора вооружения боевого модуля (СВ БМ), первая последовательная шина (ПШ1), в свою очередь, электрически соединена с цифровым модулем управления блока управления (БУ) стабилизатора вооружения боевого модуля (СВ БМ).
| КОРНЕЕВ В.В., КУЗНЕЦОВ М.И., КУЗЬМИН Л.П., ПАВЛИЧУК К.И | |||
| Основы автоматики и танковые автоматические системы | |||
| -М.: МО СССР Академии бронетанковых войск им | |||
| маршала Р.Я.МАЛИНОВСКОГО | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2009 |
|
RU2421679C1 |
| СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2005 |
|
RU2308659C2 |
| ПРИВОД НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ТАНКОВОГО ВООРУЖЕНИЯ | 1998 |
|
RU2138758C1 |
| Устройство для разработки и удаления грунта из кессона | 1938 |
|
SU60862A1 |

