Изобретение относится к области авиаприборостроения, в частности к системам бортового оборудования, и может быть использовано в качестве систем информационной поддержки экипажа: определение и отображение различных параметров, формирование предупреждающей и рекомендательной информации экипажу.
В настоящее время известны системы, эксплуатируемые на борту вертолетов, определяющие различные параметры ориентации вертолета и информирующие пилотов об их значениях. К ним относятся авиагоризонт (авторское свидетельство СССР №1190680, G01C 19/44, опубл. 10.08.2005), содержащий трехстепенный гироскоп и позволяющий определить углы крена и тангажа, и бесплатформенная инерциальная курсовертикаль (патент РФ 2249791, G01C 21/16, опубл. 10.04.2005), содержащая блок датчиков угловых скоростей и блок линейных акселерометров, предназначенная для определения углов крена, тангажа и курса.
Данные устройства не могут обеспечить достаточный уровень информационной поддержки экипажа на этапах предстартовой подготовки, запуска силовых установок, маневрирования по земной поверхности, взлета и висения вплоть до набора высоты. Этот их недостаток обусловлен тем, что рассмотренные устройства, не учитывающие динамику движения вертолета, не могут быть использованы для определения целого ряда параметров пространственной ориентации, необходимых экипажу вертолета для оценки своих действий и прогнозирования развития опасных ситуаций на вышеперечисленных этапах. К таким параметрам относятся углы наклона взлетно-посадочной площадки (ВПП), скорость руления вертолета по ВПП, скорости смещения продольной и поперечной связанных осей вертолета относительно земной поверхности, угловая скорость вращения относительно вертикальной связанной оси вертолета и пр. Превышение этими параметрами своих критических значений, определенных в РЛЭ вертолета, может привести к тяжелым авиационным происшествиям. Еще одним существенным недостатком рассмотренных устройств является невозможность определения критического значения угла крена при маневрировании вертолета по земной поверхности.
Кроме этого на безопасную эксплуатацию вертолета влияют метеорологические параметры, в том числе параметры ветра. Известны системы определения этих параметров на базе флюгеров (патент РФ 2210096, G01W 1/00, опубл. 10.08.2003, патент РФ 2101736, G01W 1/02, G01W 1/04, опубл. 01.10.1998). Реализуемый в этих наземных системах принцип действия не может быть применен на борту вертолета, поскольку описанные устройства под действием специфических для воздушного судна внешних воздействующих факторов (вибрации, обледенение, большие ветровые нагрузки) быстро утратят работоспособность.
Кроме того, в условиях ограниченного пространства кабины вертолета наличие всех этих приборов приведет к загромождению, разнообразие индикаторов - к снижению концентрации внимания пилота, а все это - к аварийным ситуациям.
За прототип заявляемого технического решения принята система воздушных сигналов для вертолета (патент РФ №86752, G01P 5/00, опубл. 10.09.2009). Данная система содержит датчик вектора воздушного потока, датчик температуры воздуха, датчик вертикальной перегрузки, три датчика составляющих вектора угловой скорости вращения вертолета в связанной системе координат, датчик угла крена, датчик угла тангажа, датчик вертикальной бароинерциальной скорости, а также двенадцать преобразователей. Система предназначена для определения относительной и абсолютной высоты полета, приборной скорости, аэродинамических углов, плотности воздуха относительно уровня моря, температуры наружного воздуха, составляющих вектора воздушной скорости вертолета в проекции на связанные оси координат.
К недостаткам данной системы относится недостаточный объем информации, необходимой для обеспечения безопасности эксплуатации вертолета на этапах до набора высоты. Так, данная система не позволяет определить такие метеорологические параметры, как направление и скорость ветра и, как следствие, максимально допустимую взлетную массу, а также смещение вертолета относительно земной поверхности. А превышение летных ограничений по этим параметрам приводит к аварийным ситуациям. Например, в случае отсутствия специальных приборов экипаж определяет максимально допустимую взлетную массу, обращаясь к справочным данным, изложенным в РЛЭ вертолета. При отсутствии у экипажа достоверных данных о скорости и направлении ветра максимально допустимая взлетная масса будет определена с большой погрешностью, и, как следствие, будет неправильно выбран способ взлета, который создаст угрозу безопасности полетов.
Кроме того, недостатком данной системы является низкая механическая надежность флюгерного датчика вектора воздушного потока.
Технический результат предложенного решения состоит в повышении безопасности эксплуатации вертолетов на этапах предстартовой подготовки, запуска силовых установок, маневрирования по земной поверхности, взлета и висения вплоть до набора высоты за счет определения и отображения метеорологических параметров и параметров ориентации вертолета с учетом особенностей динамики его движения, в возможности предупреждения экипажа о достижении определяемыми параметрами критических значений, выработки рекомендательной информации, а также в повышения надежности работы системы.
Указанный результат достигается тем, что система информационной поддержки экипажа вертолета включает приемник воздушных сигналов, вычислитель метеорологических параметров, измерительный модуль, в состав которого входят датчики составляющих вектора угловой скорости на связанные оси вертолета и датчик кажущегося ускорения по вертикальной связанной оси вертолета. Причем система содержит блок анализа метеорологических параметров, вход которого соединен с вычислителем метеорологических параметров и блоком памяти, а выход - с блоком индикации и сигнализации и блоком расчета максимально допустимой взлетной массы, соединенным с блоком памяти, формирователь рекомендаций, соединенный с блоком расчета максимально допустимой взлетной массы и блоком анализа метеорологического направления ветра и совместно с ним подключенный к блоку индикации и сигнализации, блок определения параметров ориентации, вход которого соединен с содержащим датчики напряженности магнитного поля по связанным осям вертолета и датчики кажущегося ускорения по продольной и поперечной связанным осям вертолета измерительным модулем, а выход - с блоком расчета критического крена, блоком анализа параметров ориентации и движения и блоком анализа метеорологического направления ветра, вход которого также соединен с вычислителем метеорологических параметров, соединенный с блоком памяти блок анализа параметров ориентации и движения, вход которого подключен к датчику общего шага винта и датчику положения ручки циклического шага через блок расчета критического крена, а выход - к блоку индикации и сигнализации, с которым соединен датчик углов наклона через блок анализа углов наклона с подключенным к нему блоком памяти. Причем приемник воздушных сигналов выполнен в виде многоканального аэрометрического зонда, содержащего два модуля определения скорости и направления воздушного потока, датчик температуры и датчик давления
Заявленная система представлена структурной схемой, показанной на чертеже.
Бортовая система информационной поддержки экипажа вертолета (Фиг.1) содержит приемник 1 воздушных сигналов, выполненный в виде многоканального панорамного аэрометрического зонда, содержащего два независимых модуля определения параметров воздушного потока, а также датчики температуры наружного воздуха и атмосферного давления (не показаны).
Приемник 1 соединен с вычислителем 2 метеорологических параметров, представляющим собой электронный блок, содержащий аналого-цифровой преобразователь, микроконтроллер, электроизмерительные схемы. Система также содержит блок 3 анализа метеорологических параметров с подключенным к нему блоком 4 памяти о летных ограничениях, блок 5 анализа метеорологического направления ветра, блок 6 расчета максимально-допустимой взлетной массы, к которому также подключен блок 4 памяти, формирователь 7 рекомендаций. Выходы блока 3 и формирователя 7 подключены к блоку 8 индикации и сигнализации. Блок 8 предназначен для отображения определяемых параметров (скорости и направления ветра относительно продольной оси вертолета, составляющих скорости ветра - попутной, встречной, в правый и левый борт, атмосферного давления и температуры наружного воздуха, максимально-допустимых взлетных масс в зависимости от способа взлета, углов наклона взлетно-посадочной площадки, углы крена, тангажа, курса, критического крена, скорость руления, скорости смещения продольной и поперечной осей вертолета относительно земной поверхности, угловой скорости вращения относительно вертикальной оси вертолета и т.д.), а также для выдачи предупреждающей и аварийной сигнализации при достижении определяемыми параметрами критических значений. Кроме того, на блоке 8 отображаются рекомендации по построению безопасного маневра и по определению способа взлета с указанием максимально допустимой взлетной массы для каждого из указанных способов взлета.
Система также включает измерительный модуль 9, содержащий датчики кажущегося ускорения по связанным осям вертолета, в качестве которого использован трехосевой микромеханический акселерометр, датчики составляющих вектора угловой скорости на связанные оси вертолета, в качестве которых использован трехосевой микромеханический датчик угловых скоростей, датчики напряженности магнитного поля по связанным осям вертолета, в качестве которых использован трехосевой магнитометр, и датчики температуры (не показаны), предназначенные для температурной компенсации устройств модуля 9. Модуль 9 предназначен для определения вектора кажущегося ускорения связанных осей вертолета без учета модуля вектора поля тяжести, определения проекций абсолютной угловой скорости на связанные оси вертолета и определения суммарной составляющей напряженности магнитного поля Земли и магнитного поля вертолета. Модуль 9 подключен через блок 10 определения параметров ориентации к блоку 5 и блоку 11 анализа параметров ориентации и движения, которые, в свою очередь, подключены к блоку 8.
Кроме этого в системе имеются датчик 12 общего шага винта и датчик 13 положения ручки циклического шага, соединенные с блоком 14 расчета критического крена, который через блок 11 с подключенным к нему блоком 4 соединен с блоком 8. Также система содержит датчик 15 углов наклона, включающий прецизионный двухосевой микромеханический акселерометр и датчик температуры (не показаны) для компенсации температурных погрешностей акселерометра, блок 16 анализа углов наклона с подключенным к нему блоком 4, который также соединен с блоком 8.
Система функционирует следующим образом. Приемник 1 размещается на фюзеляже вертолета в месте его наименьшего аэродинамического затенения элементами конструкции вертолета. Под действием ветра на приемных устройствах (не показаны) приемника 1 формируются пневматические сигналы, которые с помощью датчиков давления (не показаны) приемника 1 преобразуются в электрические величины. Сигналы от всех датчиков приемника 1 поступают на вычислитель 2. В вычислителе 2 по заранее определенным калибровочным характеристикам и данным, поступающим с приемника 1, выполняется коррекция инструментальных погрешностей датчиков приемника 1, после чего на основе комплексной обработки информации формируются сигналы о скорости и направлении ветра, температуре окружающей среды и атмосферном давлении. Эти данные поступают на блок 3, где выполняется разложение вектора скорости ветра на ортогональные составляющие в связанной системе координат, и на вход блока 5. На основе вычисленных значений составляющих вектора ветра, температуры, атмосферного давления и информации о летных ограничениях вертолета, поступающей на блок 3 из блока 4, формируются команды для передачи на блок 8 и блок 6.
В блоке 6 на основе данных о встречной или попутной составляющих скорости ветра, температуре воздуха, атмосферном давлении, поступающих от блока 3, а также на основе номограмм для определения максимально допустимой взлетной массы в зависимости от способа взлета и метеорологических параметров, хранящихся в блоке 4, определяется максимально допустимая взлетная масса для текущих метеорологических условий.
Информация с модуля 9 поступает на блок 10, где производится определение начальных и текущих значений углов крена и тангажа, текущего и стояночного курса, скорости смещения продольной и поперечной осей вертолета относительно земной поверхности, скорости руления и угловой скорости вращения относительно вертикальной оси вертолета на этапе висения.
На этапе предстартовой подготовки до запуска силовых установок на вход блока 5 поступает информация о стояночном курсе вертолета от блока 10 и информация о векторе ветра относительно продольной оси вертолета от вычислителя 2. В соответствии с этими данными в блоке 5 производится расчет и сохранение значения вектора магнитного ветра. В дальнейшем на этапах после запуска силовых установок вплоть до набора высоты в блоке 5 на основе информации о текущем курсе и сохраненных данных о векторе магнитного ветра определяются проекции этого вектора на связанные оси вертолета.
Блок 7 на основе данных, получаемых от блока 6, и данных, получаемых от блока 4, формирует команды, имеющие характер рекомендаций по построению безопасного маневра и выбору способа взлета и взлетного курса, которые передаются для отображения на блок 8.
В то же время сигналы с датчиков 12 и 13 характеризуют положение ручки общего шага и положение ручки циклического шага соответственно. Эта информация поступает на вход блока 14 при маневрировании вертолета по земной поверхности. Сюда же поступает и информация с блока 10, на основе которой производится расчет критического значения угла крена.
В блоке 11 на основе данных блока 10 о текущем крене, углах наклона взлетно-посадочной площадки, скорости смещения продольной и поперечной осей вертолета относительно земной поверхности и угловой скорости вращения относительно вертикальной оси вертолета, а также данных о критическом значении угла крена, поступивших от блока 14 и данных из блока 4, формируются команды для передачи на блок 8.
На этапе до запуска силовых установок в системе функционирует датчик 15. Сигналы с датчика 15 поступают на вход блока 16, где определяется текущее значение углов наклона взлетно-посадочной площадки с учетом начальных углов стоянки вертолета на отгоризонтированной площадке при нормальных климатических условиях. Также на основе этой информации и информации о летных ограничениях вертолета, поступающей на блок 16 из блока 4, формируются команды для передачи на блок 8.
Таким образом, блок 8 отображает определяемые параметры и рекомендательную информацию по выбору способа взлета, а также предупреждает экипаж о достижении этими параметрами критических значений.
Благодаря использованию предлагаемой системы на борту вертолетов значительно повышается уровень информационного обеспечения экипажа, что, в свою очередь, приводит к повышению безопасности полетов и снижению количества авиационных происшествий на этапах до набора высоты.
Благодаря применению в качестве устройства для определения скорости и направления ветра приемника, содержащего два модуля, реализующих различные по физической природе способы определения скорости и направления ветра, а также за счет отсутствия в приемнике подвижных элементов, повышается надежность системы.
Проведенный анализ уровня техники позволяет установить, что заявляемое техническое решение соответствует условиям патентоспособности изобретения: промышленная применимость, новизна, изобретательский уровень.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| СТАРТОВАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497718C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
Изобретение относится к области авиаприборостроения, в частности к системам бортового оборудования, и может быть использовано в качестве систем информационной поддержки экипажа: определение и отображение различных параметров, формирование предупреждающей и рекомендательной информации экипажу. Техническим результатом является повышение безопасности эксплуатации вертолетов на этапах до набора высоты. Система информационной поддержки экипажа вертолета включает приемник воздушных сигналов, вычислитель метеорологических параметров, измерительный модуль, в состав которого входят датчики составляющих вектора угловой скорости на связанные оси вертолета и датчик кажущегося ускорения по вертикальной связанной оси вертолета. Система также содержит блок анализа метеорологических параметров, формирователь рекомендаций, блок определения параметров ориентации, блок памяти, блок анализа параметров ориентации и движения. 1 з.п. ф-лы, 1 ил.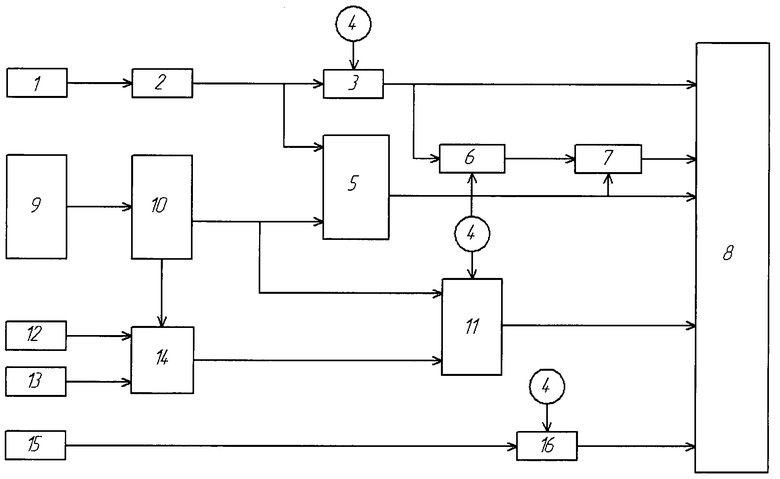
1. Система информационной поддержки экипажа вертолета, включающая приемник воздушных сигналов, вычислитель метеорологических параметров, измерительный модуль, в состав которого входят датчики составляющих вектора угловой скорости на связанные оси вертолета и датчик кажущегося ускорения по вертикальной связанной оси вертолета, отличающаяся тем, что система содержит блок анализа метеорологических параметров, вход которого соединен с вычислителем метеорологических параметров и блоком памяти, а выход - с блоком индикации и сигнализации и блоком расчета максимально допустимой взлетной массы, соединенным с блоком памяти, формирователь рекомендаций, соединенный с блоком расчета максимально допустимой взлетной массы и блоком анализа метеорологического направления ветра и совместно с ним подключенный к блоку индикации и сигнализации, блок определения параметров ориентации, вход которого соединен с содержащим датчики напряженности магнитного поля по связанным осям вертолета и датчики кажущегося ускорения по продольной и поперечной связанным осям вертолета измерительным модулем, а выход - с блоком расчета критического крена, блоком анализа параметров ориентации и движения и блоком анализа метеорологического направления ветра, вход которого также соединен с вычислителем метеорологических параметров, соединенный с блоком памяти блок анализа параметров ориентации и движения, вход которого подключен к датчику общего шага винта и датчику положения ручки циклического шага через блок расчета критического крена, а выход - к блоку индикации и сигнализации, с которым соединен датчик углов наклона через блок анализа углов наклона с подключенным к нему блоком памяти.
2. Система информационной поддержки экипажа вертолета по п.1, отличающаяся тем, что приемник воздушных сигналов выполнен в виде многоканального аэрометрического зонда, содержащего два модуля определения скорости и направления воздушного потока, датчик температуры и датчик давления.
| АКСЕЛЕРОМЕТР | 1999 |
|
RU2191390C2 |
| Клещевидный висячий замок | 1934 |
|
SU41875A1 |
| БОРТОВАЯ СИСТЕМА ОБРАБОТКИ И РЕГИСТРАЦИИ ИНФОРМАЦИИ | 2005 |
|
RU2289102C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2347193C1 |
| US 5283643 А, 01.02.1994. | |||

