Изобретение относится к области автоматизированного управления движением транспортных средств (ТС), заключающегося в автоматическом формировании маршрута движения ТС с возможностью минимизации последствий воздействия неблагоприятных факторов на участников движения вследствие возникновения чрезвычайных ситуаций (ЧС) на потенциально-опасных объектах (ПОО).
Известен способ, который реализован в автомобильном навигационном приборе, имеющем память для хранения электронной карты местности, бортовую ЭВМ, дисплей и приемник дорожной информации (патент Японии №08044997, опубликован 16.02.1996 г.). Способ заключается в том, что определяют текущие координаты ТС, вычисляют кратчайший маршрут от начальной до конечной точки и отображают его на дисплее. С помощью приемника дорожной информации получают на ТС радиосообщение с информацией о дорожных «пробках» и «затруднение в движении» на дорогах, которые отображают на дисплее изменением окраски дороги в местах «пробка» и «затруднение движения». Причем степень изменения окраски соответствует степени затруднения движения ТС.
Недостаток способа состоит в том, что он не может быть применен для автоматического определения маршрута движения ТС.
Известен способ, который относится к области управления движением ТС, основанный на передаче навигационных команд ТС с дисплеем, отображающим карту (Патент RU 2377658, 2008, МПК G08G 1/0969 (2006.01), G01C 21/34 (2006.01), опубликован 27.12.2009 г., бюл. №36). Способ заключается в том, что создают модельную электронную скоростную карту дорожной сети (ДС) населенного пункта, отражающую среднестатистический скоростной режим движения на каждой дороге, которую вводят в память компьютера центральной станции (ЦС). На указанной карте создают дорожный граф, корректируют данные дорожного графа на основе информации об измененных знаках дорожного движения. От компьютеров ТС по каналу радиосвязи с заданной периодичностью передают на компьютер ЦС актуальные значения собственных средних скоростей, по ним определяют среднестатистический скоростной режим движения. Далее вычисляют отклонения между актуальными значениями средней и модельной скоростей на сегменте дорожного графа и по этим отклонениям формируют файлы «пробок» и «антипробок». Учитывая эти файлы и веса правых и левых поворотов, корректируют указанную карту ДС населенного пункта. Рекомендуемый оптимальный маршрут определяют с учетом уточненных параметров указанной карты ДС населенного пункта, принимаемой ТС от центральной станции с возможностью визуализации на экране дисплея ТС этих маршрутов на указанной карте и отображением текущего положения ТС.
Недостатком способа является относительная низкая точность определения оптимального маршрута движения ТС в силу однокритериального подхода к определению маршрута движения. Кроме того, в указанном способе не достигается оптимизация определенного маршрута движения ТС с учетом минимальных затрат на проезд по нему ТС.
Наиболее близким по своей технической сущности к заявленному является «Способ определения оптимального маршрута транспортного средства» (Патент RU 2444794, 20108, МПК G08G 1/0969 (2006.01), G01C 21/34 (2006.01), опубликован 10.03.2012), заключающийся в том, что формируют модельную цифровую карту (МЦК) ДС в виде совокупности узлов (У) и ребер (Р) графа, содержащих их метрические и семантические данные и представляющие соответственно перекрестки и дороги выделенного региона, в память компьютера ЦС вводят дополнительные семантические данные о всех дорогах на дорожной сети выделенного региона и данные о метеоусловиях на дорожной сети, вводят МЦК в память компьютера ЦС, снабженной средствами радиосвязи и навигации, и передают ее по каналам радиосвязи на ТС, снабженные бортовым компьютером (БК), средствами радиосвязи и навигации, принятую i-ым ТС, где i=1, 2, …, N, МЦК вводят в память БК i-го ТС, кроме того, в БК i-го ТС вводят характеристики ТС и данные о запланированном маршруте движения i-го ТС, которые передают по каналу радиосвязи для ввода в память компьютера ЦС, с учетом среднестатистической скорости VCT движения ТС, определяемой семантическими характеристиками МЦК на каждом участке дороги, на ЦС для i-го ТС в виде совокупности ребер, заключенных между узлами графа ДС, формируют оптимальный маршрут, который обеспечивает минимизацию суммарных затрат 



Недостаток ближайшего аналога состоит в том, что он имеет узкую область применения, в частности, в случаях, когда в регионе, в котором сформирована ДС, расположены ПОО (химические предприятия, базы хранения токсичных газов и т.п.) и возможно, в случае ЧС на ПОО, возникновение зон, в пределах которых уровни вредных веществ, содержащихся в выбросах ПОО, будут превышать предельно допустимые уровни опасные для проезда по ним ТС с людьми.
Заявленное техническое решение расширяет арсенал средств данного назначения, в частности для формирования оптимального и безопасного маршрута движения ТС по ДС, в которой в силу ЧС могут возникать экологически опасные зоны.
Указанный технический результат достигается тем, что в известном способе определения оптимального маршрута ТС, заключающегося в том, что формируют МЦК ДС в виде совокупности У и Р графа, содержащих их метрические и семантические данные и представляющих соответственно перекрестки и дороги ДС, вводят МЦК в память компьютера ЦС, снабженной средствами радиосвязи и навигации, и передают МЦК по каналам радиосвязи на ТС, находящиеся в пределах ДС и снабженные БК, средствами радиосвязи и навигации, принятую i-ым, где i=1, 2, …, N, ТС МЦК вводят в память его БК, кроме того, в БК i-го ТС вводят характеристики ТС и данные о запланированном маршруте движения i-го ТС, которые передают по каналу радиосвязи на ЦС, и вводят их в память компьютера ЦС, с учетом полученных данных от i-го ТС и среднестатистической скорости VCT движения ТС по ДС на ЦС формируют в виде совокупности Р, заключенных между У графа ДС, маршрут движения для i-го ТС, который обеспечивает минимизацию суммарных затрат 



Благодаря перечисленной новой совокупности существенных признаков в заявленном способе реализован подход формирования оптимальных маршрутов движения ТС при образовании на указанных маршрутах зон с уровнем ВВ, превышающим ПДУ, вследствие возникновения ЧС на ПОО.
Заявленный способ поясняется чертежами, на которых показаны:
фиг.1 - Общая структурная схема управления и выбора маршрута движения транспортным средством;
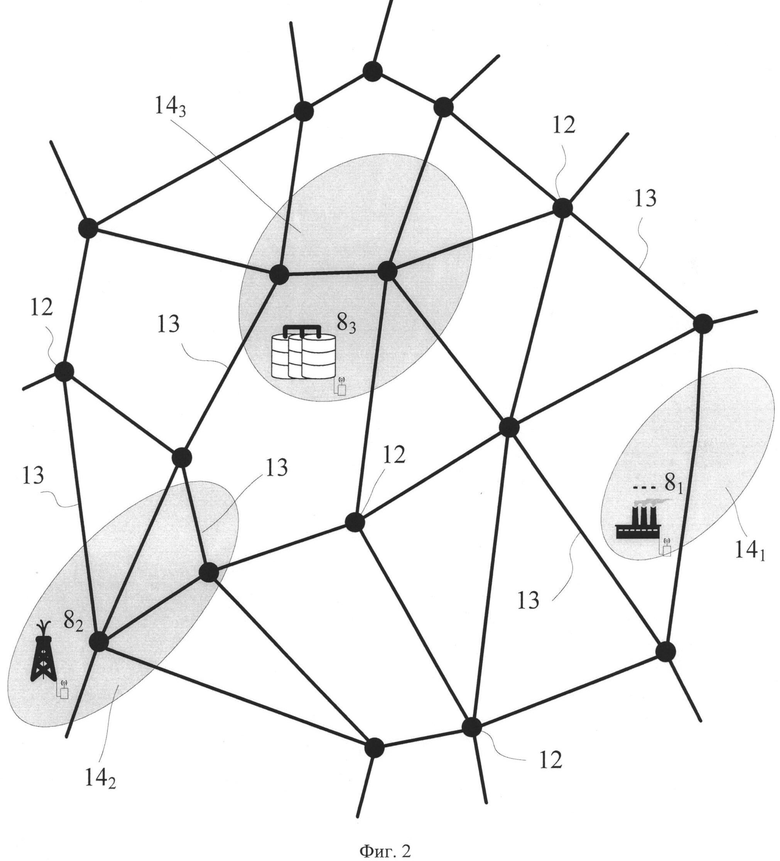
фиг.2 - Схема дорог и потенциально-опасных объектов дорожной сети;
фиг.3 - Вариант формирования маршрута движения транспортного средства при нахождении потенциально-опасных объектов в состоянии «норма»;
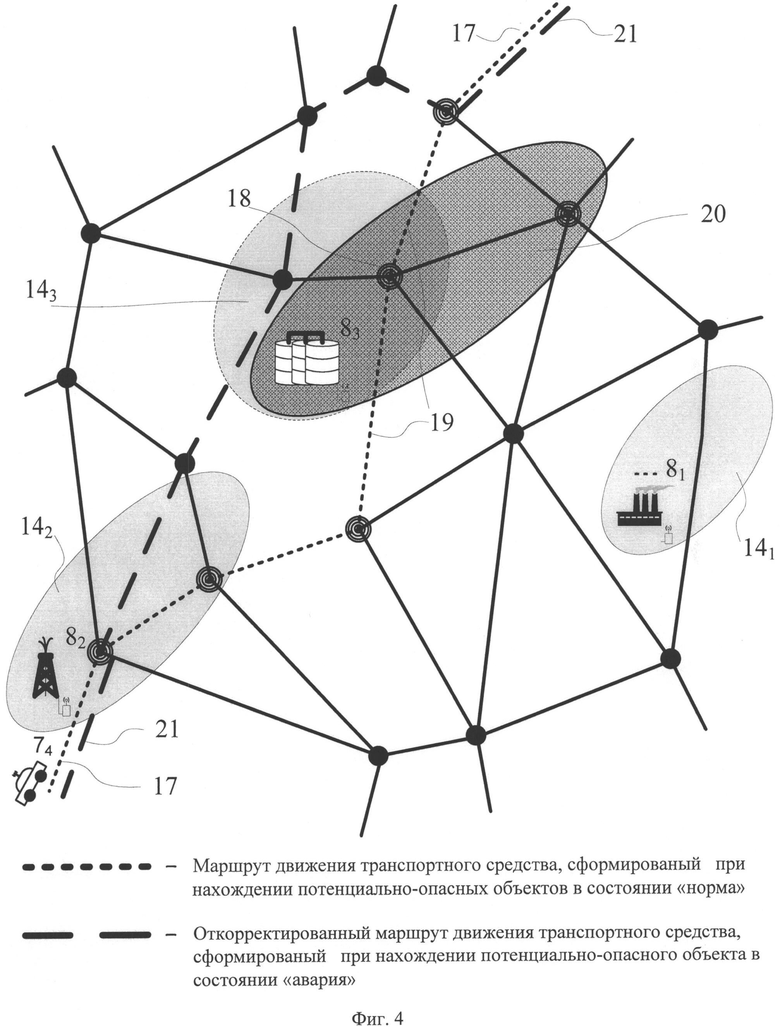
фиг.4 - Вариант формирования маршрута движения транспортного средства при нахождении потенциально-опасного объекта в состоянии «авария».
Заявленный способ реализуют следующим образом.
Возможность реализации способа можно показать на системе, отображенной на фиг.1, которая включает навигационную систему, размещенную на космическом объекте 1, центральную станцию 2, снабженную компьютером и средствами связи, метеостанцию 3, снабженную средствами связи с ЦС 2, службу эксплуатации дорог 4, снабженную средствами связи с ЦС 2, службу регулирования движения 5, снабженную средствами связи с ЦС 2, другие службы 6, деятельность которых влияет на движение и которые также снабжены средствами связи с ЦС 2, совокупность ТС 71, 72, …, 7N, каждое из которых снабжено средствами радиосвязи и навигации, обеспечивающими прием радиоданных по каналам 9 от космического объекта 1, определение своих координат и передачу данных по радиоканалам 10 на ЦС 2 о местоположении и фактической скорости, а также прием данных от ЦС 2 о фактической и прогнозируемой ситуации на ДС, систему мониторинга состояния потенциально-опасных объектов, которая включает совокупность потенциально-опасных объектов 81, 82, …, 8M, находящихся в пределах ДС и снабженных ДКС, которые по каналам радиосвязи 11 через установленные временные интервалы T0 передают на ЦС 2 данные о состоянии ПОО 8.
Первоначально задают значения ПДУ ВВ в зонах расположения ПОО 8, рассчитывают прогнозируемые площади зон 141, 142, …, 14M (см. фиг.2), в пределах которых уровни ВВ могут превысить ПДУ в случае возникновения на ПОО 8 ЧС. Расчет прогнозируемых площадей для каждой зоны 14 вычисляют с учетом розы ветров в районе расположения ПОО 8, которая представляет собой статистическую векторную диаграмму, характеризующую вероятностное направление ветра в данном месте по результатам многолетних наблюдений (см. фиг.1). Порядок расчета подобных зон известен, см., например, «Методика расчета концентраций в атмосферном воздухе вредных веществ, содержащихся в выбросах предприятий». Государственный комитет СССР по гидрометеорологии и контролю природной среды. Ленинград: Гидрометеоиздат, 1987 г. или Г.П. Саков. Оценка состояния объектов народного хозяйства в условиях воздействия поражающих факторов ОМП, производственных аварий и катастроф. Учебное пособие. Новогорск: ВЦОК ГО, 1989.
Вводят исходные данные на ЦС 2 и характеристики ТС 7 в их БК. На ЦС 2 формируют МЦК ДС в виде совокупности узлов 12 и ребер 13 графа, содержащих их метрические и семантические данные и представляющих соответственно перекрестки и дороги ДС (см. фиг.2).
От ЦС 2 по каналам радиосвязи 10 передают на ТС 7 МЦК, которую вводят в память бортового компьютера i-го ТС 7. Затем в бортовой компьютер i-го ТС 7 вводят данные о запланированном маршруте движения i-го ТС 7 и передают их по каналу радиосвязи 10 на ЦС 2 для ввода в память компьютера.
Если на ЦС 2 от всех ДКС на ПОО 8 каналам радиосвязи 11 получен сигнал «норма», то на ЦС 2 с учетом полученных данных от i-го ТС 74 и среднестатистической скорости VCT движения транспортных средств 7 по ДС формируют в виде совокупности ребер 15, заключенных между узлами 16 графа ДС (см. фиг.3), маршрут движения для i-го ТС 74, который обеспечивает минимизацию суммарных затрат 


Сформированный маршрут движения для i-го ТС 7 от ЦС 2 по каналам радиосвязи 10 передают на i-ое ТС 7, где с помощью бортового компьютера его отображают на МЦК.
От i-го ТС 7 на ЦС 2 по каналам радиосвязи 10 передают сведения о фактической скорости
Данные о состоянии ДКС по каналам радиосвязи 11 передают через установленные временные интервалы, например через T0=1 мин, на ЦС 2. Конкретные значения T0 для каждого ПОО 8 выбирают с учетом прогнозируемой скорости распространения площади зоны, в пределах которой уровень ВВ может превысить ПДУ в случае возникновения на ПОО 8 ЧС. Прогнозируемая скорость распространения площади зоны зависит от конкретных метеорологических условий в районе расположения ПОО 8, например, чем выше скорость ветра в районе j-го ПОО 8, тем меньше период передачи сигналов от ДКС на j-ом ПОО 8 по каналам радиосвязи 11 на ЦС 2.
При получении на ЦС 2 от ДКС на j-ом ПОО 8 по каналам радиосвязи 11 сигнала «авария» уточняют прогнозируемую площадь j-ой зоны 143 с учетом фактических метеоусловий, в качестве которых учитывают силу и направление ветра, влажность и давление воздуха, наличие гидрометеоров (см. фиг.4). Корректируют для i-го ТС 74 маршрут движения 17, исключающий проезд У 18 и Р 19 графа ДС, находящихся в уточненной прогнозируемой зоне 20 с уровнем ВВ, превышающим ПДУ, передают повторно откорректированный маршрут движения 21 для i-го ТС 74.
В случае возникновения на ПОО 8 ЧС на БК ТС 7 дополнительно отображают местоположения зон 14, в пределах которых уровни ВВ могут превысить ПДУ, что позволит участникам движения заблаговременно отказаться от проезда по зараженным зонам.
Для i-го ТС 7, которое в момент возникновения ЧС на ПОО 8 находится в зоне с уровнем ВВ, превышающим ПДУ, на ЦС 2 в момент получения по каналам радиосвязи 11 сигнала «авария» формируют маршрут движения, который обеспечивает выезд из указанной зоны за минимальное время. Сформированный маршрут движения для такого i-го ТС 7 по каналам радиосвязи 10 передают на i-ое ТС 7.
Корректировка всех маршрутов движения ТС 7 вследствие возникновения ЧС на ПОО 8 на ЦС 2 производится с учетом возможного образования «пробок» на участках ДС из-за массового объезда и выезда из зараженных зон 20. Движение ТС 2 по таким маршрутам позволяет избежать создания «пробок» в пределах ДС, особенно в местах, где участники движения могут быть подвержены воздействию неблагоприятных факторов вследствие распространения зон 20 с уровнем ВВ, превышающим ПДУ.
Таким образом, предпринятая совокупность действий обеспечивает формирование таких маршрутов движения ТС, следование по которым позволяет совершать объезд транспортными средствами зон с уровнями ВВ, превышающими ПДУ, вследствие возникновения ЧС на ПОО, а также выезд за минимальное время из зараженной зоны, если ТС на момент возникновения ЧС на ПОО находится в ней.
Реализация указанного способа позволит существенно снизить потенциальный ущерб, который может быть нанесен участникам дорожного движения вследствие воздействия неблагоприятных факторов при возникновении чрезвычайных ЧС на ПОО.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444794C1 |
| СПОСОБ ФОРМИРОВАНИЯ РЕКОМЕНДУЕМЫХ МАРШРУТОВ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2011 |
|
RU2459259C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2377658C1 |
| Способ формирования рекомендуемых маршрутов следования железнодорожных вагонов | 2020 |
|
RU2745549C1 |
| СПОСОБ АГРЕГАЦИИ МНОЖЕСТВЕННЫХ ПРОЕЗДОВ ПО МАРШРУТУ ДЛЯ РАСЧЁТА ОПТИМАЛЬНЫХ ПРОФИЛЕЙ СКОРОСТИ ДЛЯ ГОРОДСКОГО РЕЛЬСОВОГО ТРАНСПОРТА | 2023 |
|
RU2798951C1 |
| Устройство для контроля движения транспортных средств | 1990 |
|
SU1836714A3 |
| Система контроля транспортных средств с возможностью осуществления обратной связи | 2015 |
|
RU2633663C2 |
| СПОСОБ И УСТРОЙСТВО ОЦЕНКИ РАЗВЕДЫВАТЕЛЬНОЙ ДОСТУПНОСТИ УЗЛОВ КОММУТАЦИИ СЕТИ РАДИОСВЯЗИ | 2020 |
|
RU2751583C1 |
| СПОСОБ ОПЕРАТИВНОГО СОСТАВЛЕНИЯ МОБИЛИЗАЦИОННЫХ КАРТ ПРИ ЛИКВИДАЦИИ ПОСЛЕДСТВИЙ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2014 |
|
RU2559340C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ТРАНСПОРТНЫХ СРЕДСТВ ЦЕНТРОМ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ В ВОЗДУШНОМ, НАЗЕМНОМ ПРОСТРАНСТВЕ | 2018 |
|
RU2676519C1 |

Изобретение относится к области автоматизированного управления движением транспортных средств (ТС). Способ заключается в автоматическом формировании маршрута движения (МД) ТС с минимизацией последствий воздействия неблагоприятных факторов на участников движения. Предварительно задают значения предельно допустимых уровней (ПДУ) вредных веществ (ВВ), содержащихся в выбросах потенциально-опасных объектов (ПОО) в зонах расположения ПОО. От ПОО передают на центральную станцию (ЦС) сигналы о состоянии ПОО. Рассчитывают прогнозируемые площади зон (ППЗ). На ЦС вводят исходные данные о характере дорог дорожной сети (ДС), формируют модельную цифровую карту (МЦК) ДС и передают ее на ТС. От ТС на ЦС передают данные о запланированном МД и характеристиках ТС. Если от ПОО не получен сигнал «авария», то на ЦС для ТС формируют МД. Затем корректируют МЦК и МД ТС с учетом минимизации суммарных затрат, необходимых для перемещения по сформированному МД. Если от ПОО получен сигнал «авария», то с учетом фактических метеоусловий уточняют ППЗ и корректируют для ТС МД, исключающий проезд участков ДС. Передают повторно откорректированный МД для ТС. Технический результат заключается в формировании оптимального и безопасного маршрута движений ТС по ДС. 3 з.п. ф-лы, 4 ил.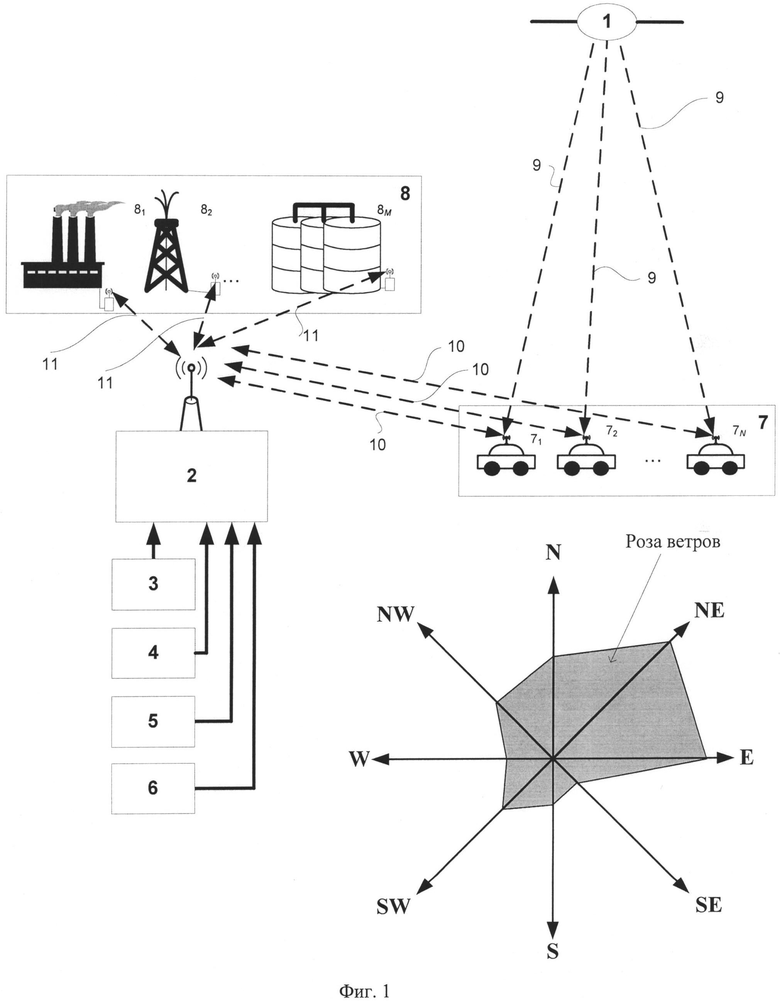
1. Способ формирования маршрута движения транспортного средства (ТС) на дорожной сети (ДС), заключающийся в том, что формируют модельную цифровую карту (МЦК) ДС в виде совокупности узлов (У) и ребер (Р) графа, содержащих их метрические и семантические данные и представляющих соответственно перекрестки и дороги ДС, вводят МЦК в память компьютера центральной станции (ЦС), снабженной средствами радиосвязи и навигации, и передают МЦК по каналам радиосвязи на ТС, находящиеся в пределах ДС и снабженные бортовым компьютером (БК), средствами радиосвязи и навигации, принятую i-ым, где i=1,2,…,N, ТС МЦК вводят в память его БК, кроме того, в БК i-го ТС вводят характеристики ТС и данные о запланированном маршруте движения i-го ТС, которые передают по каналу радиосвязи на ЦС и вводят их в память компьютера ЦС, с учетом полученных данных от i-го ТС и среднестатистической скорости VCT движения ТС по ДС на ЦС формируют в виде совокупности Р, заключенных между У графа ДС, маршрут движения для i-го ТС, который обеспечивает минимизацию суммарных затрат , затрачиваемых при перемещении ТС от места нахождения в пункт назначения, где - стоимость эксплуатационных расходов при перемещении i-го ТС по сформированному маршруту движения, а - стоимость аренды i-го ТС при перемещении по сформированному маршруту движения, по каналу радиосвязи сформированный маршрут движения i-го ТС передают на i-е ТС, где с помощью БК его отображают на МЦК, от i-го ТС на ЦС по каналам радиосвязи передают сведения о фактической скорости и местоположении i-го ТС, с учетом которых на ЦС корректируют МЦК с указанием на ней «пробок» и «антипробок», по данным откорректированной МЦК на ЦС корректируют маршрут движения i-го ТС с учетом минимизации суммарных затрат SΣ на проезд i-го ТС по нему, откорректированные МЦК и маршруты движения ТС по каналам радиосвязи передают на ТС, находящиеся в пределах ДС, отличающийся тем, что дополнительно формируют систему мониторинга состояния потенциально-опасных объектов (ПОО), находящихся в пределах ДС, которые снабжены средствами радиосвязи и установленными на них датчиками контроля состояния (ДКС) объекта, находящимися в состоянии «норма» при отсутствии на объекте чрезвычайных ситуаций (ЧС) или «авария» при их наличии, задают предельно допустимые уровни (ПДУ) вредных веществ (ВВ), содержащихся в выбросах j-го ПОО, где j-1,2,…,М, в зоне его расположения, рассчитывают прогнозируемые площади j-ых зон, в пределах которых уровни ВВ могут превысить ПДУ в случае возникновения на j-ом ПОО ЧС, данные о состоянии ДКС передают через установленные временные интервалы Т0 на ЦС, при получении на ЦС от ДКС на j-ом ПОО сигнала «авария» с учетом фактических метеоусловий уточняют прогнозируемую площадь j-ой зоны и корректируют для i-го ТС маршрут движения, исключающий проезд У и Р графа ДС, находящихся в уточненной j-ой зоне с уровнем ВВ, превышающим ПДУ, передают повторно откорректированный маршрут движения для i-го ТС.
2. Способ по п.1, отличающийся тем, что в случае возникновения на j-ом ПОО ЧС на БК ТС дополнительно отображают местоположение j-ой зоны, в пределах которой уровень ВВ превышает ПДУ.
3. Способ по п.1, отличающийся тем, что прогнозируемую площадь j-ой зоны, в пределах которой уровень ВВ может превышать ПДУ, для j-ого ПОО рассчитывают с учетом розы ветров в районе расположения j-го ПОО.
4. Способ по п.1, отличающийся тем, что при уточнении прогнозируемой j-ой зоны в качестве фактических метеоусловий учитывают силу и направление ветра, влажность и давление воздуха, наличие гидрометеоров.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444794C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2377658C1 |
| JP H10307042 A, 17.11.1998 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

