Изобретение относится к области автоматизированного управления движением транспортных средств (ТС), заключающегося в автоматическом формировании оптимального маршрута с учетом суммарных затрат проезда ТС по рекомендуемому маршруту.
Известен способ отображения местоположения ТС на электронной карте местности в радиосистемах диспетчерского управления движением наземного транспорта (патент РФ №2207632, опубликован 27.06.2003), в котором за счет использования временных опорных точек и определения их местоположения и местоположения ТС в опорной системе координат, в качестве которой выбирают плоскую прямоугольную декартову систему координат, а также использования редукции местоположения ТС на транспортный граф, обеспечивается, в конечном итоге, непосредственное преобразование радионавигационных координат ТС в дисплейные координаты.
Недостаток способа состоит в том, что он не может быть применен для определения оптимального маршрута ТС.
Известен способ, который реализован в автомобильном навигационном приборе, имеющем память для хранения электронной карты местности, бортовую ЭВМ, дисплей и приемник дорожной информации (патент Японии №08044997, опубликован 16.02.1996 г.). Способ заключается в том, что определяют текущие координаты ТС, вычисляют кратчайший маршрут от начальной до конечной точки и отображают его на дисплее. С помощью приемника дорожной информации получают на ТС радиосообщение с информацией о дорожных «пробках» и «затруднении в движении» на дорогах, которые отображают на дисплее изменением окраски дороги в местах «пробка» и «затруднение движения». Причем степень изменения окраски соответствует степени затруднения движения ТС.
Недостаток способа состоит в том, что он не может быть применен для автоматического определения оптимального маршрута ТС.
Наиболее близким по своей технической сущности к заявленному является «Способ определения оптимального маршрута движения транспортного средства» (Патент RU 2377658, 2008, МПК G08G 1/0969 (2006.01), G01C 21/34 (2006.01), опубликован 27.12.2009, Бюл. №36), заключающийся в том, что формируют модельную цифровую карту (МЦК) дорожной сети (ДС) (в патенте названной модельной электронной скоростной картой ДС) в виде совокупности узлов и ребер дорожного графа, содержащих их метрические данные и представляющих соответственно перекрестки и дороги ДС выделенного региона, вводят МЦК в память компьютера центральной станции (ЦС) и корректируют данные дорожного графа на основе информации об измененных знаках дорожного движения, снабженной средствами радиосвязи, и передают ее по каналам радиосвязи на транспортные средства (ТС), снабженные бортовым компьютером, средствами радиосвязи и навигации, принятую ТС модельную цифровую карту вводят в память бортового компьютера i-го ТС, где i - 1, 2, …, также в бортовой компьютер вводят данные о запланированном маршруте i-го ТС и передают их по каналу радиосвязи для ввода в память компьютера ЦС, формируют на ЦС, с учетом среднестатистической скорости VСТ движения ТС, определяемой семантическими характеристиками МЦК на каждом участке дороги (в патенте актуальные значения собственных средних скоростей), оптимальный маршрут для i-го TC в виде совокупности ребер, заключенных между узлами графа дорожной сети, и передают его по каналу радиосвязи на i-e TC, где отображают оптимальный маршрут и МЦК на компьютере TC, от TC на ЦС по каналам радиосвязи передают сведения о фактической скорости  (в патенте среднестатистический скоростной режим движения) и местоположении i-го TC, на основании которых и весов правых и левых поворотов на ЦС корректируют семантические данные МЦК с указанием наличия на ней «пробок» и «антипробок», месторасположения которых на МЦК передают на TC, движущиеся в пределах ДС выделенного региона, а также передают по каналу радиосвязи i-му TC откорректированный маршрут.
(в патенте среднестатистический скоростной режим движения) и местоположении i-го TC, на основании которых и весов правых и левых поворотов на ЦС корректируют семантические данные МЦК с указанием наличия на ней «пробок» и «антипробок», месторасположения которых на МЦК передают на TC, движущиеся в пределах ДС выделенного региона, а также передают по каналу радиосвязи i-му TC откорректированный маршрут.
Недостатком ближайшего аналога является относительная низкая точность определения оптимального маршрута в силу однокритериального подхода к определению маршрута движения.
Кроме того, в способе-прототипе не достигается оптимизация выбранного маршрута с учетом минимальных затрат на его проезд.
Техническим результатом изобретения является повышение точности определения оптимального маршрута, обеспечивающего минимальные затраты на проезд по нему TC.
Указанный технический результат достигается тем, что в известном способе определения оптимальности маршрута TC, заключающегося в том, что формируют МЦК ДС, в виде совокупности узлов и ребер графа, содержащих их метрические данные, представляющих соответственно перекрестки и дороги ДС выделенного региона, вводят МЦК в память компьютера ЦС, снабженной средствами радиосвязи, и передают ее по каналам радиосвязи на TC, снабженные бортовым компьютером, средствами радиосвязи и навигации, принятую TC МЦК вводят в память бортового компьютера i-го TC, где i - 1, 2, …, также в бортовой компьютер вводят данные о запланированном маршруте i-го TC и передают их по каналу радиосвязи для ввода в память компьютера ЦС, формируют на ЦС, с учетом среднестатистической скорости VСТ движения TC, определяемой семантическими характеристиками МЦК на каждом участке дороги, оптимальный маршрут для i-го TC в виде совокупности ребер, заключенных между узлами графа дорожной сети, и передают его по каналу радиосвязи на i-е ТС, где отображают оптимальный маршрут и МЦК на компьютере ТС, от ТС на ЦС по каналам радиосвязи передают сведения о фактической скорости  и местоположении i-го TC, на основании которых на ЦС корректируют семантические данные МЦК с указанием наличия на ней «пробок» и «антипробок», месторасположения которых на МЦК передают на ТС, движущиеся в пределах ДС выделенного региона, а также передают по каналу радиосвязи i-му ТС откорректированный маршрут. Предварительно в память компьютера ЦС вводят дополнительные семантические данные о всех дорогах на ДС выделенного региона и данные о метеоусловиях на ДС, в память компьютера i-го ТС дополнительно вводят его характеристики и передают эти характеристики по каналу радиосвязи на ЦС, где их вводят в память ее компьютера, при формировании на МЦК маршрута движения i-го ТС дополнительно вычисляют возможный расход топлива при проезде каждого ребра дорожного графа, рассчитывают время, затрачиваемое на проезд по каждому ребру дорожного графа, стоимость
и местоположении i-го TC, на основании которых на ЦС корректируют семантические данные МЦК с указанием наличия на ней «пробок» и «антипробок», месторасположения которых на МЦК передают на ТС, движущиеся в пределах ДС выделенного региона, а также передают по каналу радиосвязи i-му ТС откорректированный маршрут. Предварительно в память компьютера ЦС вводят дополнительные семантические данные о всех дорогах на ДС выделенного региона и данные о метеоусловиях на ДС, в память компьютера i-го ТС дополнительно вводят его характеристики и передают эти характеристики по каналу радиосвязи на ЦС, где их вводят в память ее компьютера, при формировании на МЦК маршрута движения i-го ТС дополнительно вычисляют возможный расход топлива при проезде каждого ребра дорожного графа, рассчитывают время, затрачиваемое на проезд по каждому ребру дорожного графа, стоимость  аренды ТС при движении по каждому из альтернативных маршрутов и стоимость эксплуатационных расходов
аренды ТС при движении по каждому из альтернативных маршрутов и стоимость эксплуатационных расходов  , а на i-e TC передают оптимальный маршрут, обеспечивающий минимизацию суммарных затрат SΣ на проезд по нему TC, причем корректировку маршрута i-го TC на МЦК выполняют с учетом минимизации суммарных затрат SΣ на проезд по нему i-го TC. В качестве семантических данных дороги участка сети используют рельеф, класс дороги, тип дорожного покрытия, ширину участка дороги, соответствующие каждому ребру участка ДС, а также условия проезда по каждому ребру при соответствующих метеоусловиях, которые задают в виде корректирующих коэффициентов К таблично. Метеоусловия на ДС передают на ЦС по телекоммуникационным каналам от метеостанций службы прогноза. Суммарные затраты SΣ, необходимые для проезда по маршруту движения, вычисляют по формуле:
, а на i-e TC передают оптимальный маршрут, обеспечивающий минимизацию суммарных затрат SΣ на проезд по нему TC, причем корректировку маршрута i-го TC на МЦК выполняют с учетом минимизации суммарных затрат SΣ на проезд по нему i-го TC. В качестве семантических данных дороги участка сети используют рельеф, класс дороги, тип дорожного покрытия, ширину участка дороги, соответствующие каждому ребру участка ДС, а также условия проезда по каждому ребру при соответствующих метеоусловиях, которые задают в виде корректирующих коэффициентов К таблично. Метеоусловия на ДС передают на ЦС по телекоммуникационным каналам от метеостанций службы прогноза. Суммарные затраты SΣ, необходимые для проезда по маршруту движения, вычисляют по формуле:
SΣ=ST+SA
Для определения наличия «пробок» или «антипробок» на соответствующем ребре дорожного графа вычисляют разницу между среднестатистической VСТ и фактической VФ скоростями движения транспорта на этом ребре и при выполнении условия  фиксируют наличие «пробки», а при выполнении условия
фиксируют наличие «пробки», а при выполнении условия  фиксируют наличие «антипробок», где
фиксируют наличие «антипробок», где  - предварительно заданная минимальная разница между VСТ и VФ, которую предварительно заносят в память компьютера ЦС. Информацию о наличии «пробок» или «антипробок» на ЦС по телекоммуникационным каналам передают службы эксплуатации дорог, и/или службы регулирования движения, и/или другие службы, деятельность которых влияет на движение, с учетом планируемых и фактически выполняемых работ, ограничивающих движение на дорогах. В качестве эксплуатационных характеристик ТС используют данные об имеющемся объеме заправки топливом, цену единицы объема топлива, расход топлива в зависимости от скорости движения ТС и режима его эксплуатации и стоимость аренды ТС в единицу времени. На бортовом компьютере ТС дополнительно отображают местоположения автозаправочных станций, станций технического обслуживания и другие объекты вдоль выбранного маршрута движения для i-го ТС.
- предварительно заданная минимальная разница между VСТ и VФ, которую предварительно заносят в память компьютера ЦС. Информацию о наличии «пробок» или «антипробок» на ЦС по телекоммуникационным каналам передают службы эксплуатации дорог, и/или службы регулирования движения, и/или другие службы, деятельность которых влияет на движение, с учетом планируемых и фактически выполняемых работ, ограничивающих движение на дорогах. В качестве эксплуатационных характеристик ТС используют данные об имеющемся объеме заправки топливом, цену единицы объема топлива, расход топлива в зависимости от скорости движения ТС и режима его эксплуатации и стоимость аренды ТС в единицу времени. На бортовом компьютере ТС дополнительно отображают местоположения автозаправочных станций, станций технического обслуживания и другие объекты вдоль выбранного маршрута движения для i-го ТС.
Благодаря перечисленной новой совокупности существенных признаков в заявленном способе реализован многокритериальный подход, обеспечивающий учет как времени, затрачиваемого транспортным средством при движении по рекомендованному маршруту, и, следовательно, учет затрат на аренду транспортного средства, так и учет расхода топлива, необходимого для преодоления маршрута, и, следовательно, учет затрат на эксплуатационные расходы. Это определяет возможность более точного определения оптимального маршрута по критерию минимизации суммарных затрат на проезд по нему транспортного средства, то есть возможность достижения сформулированного технического результата.
Заявленный способ поясняется чертежами, на которых показаны:
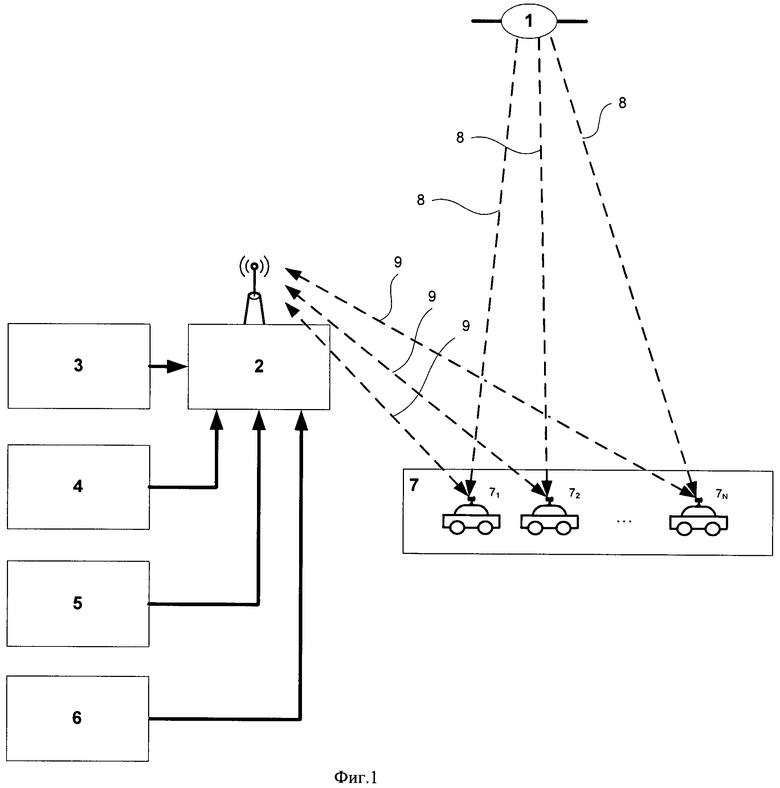
фиг.1 - общая структурная схема управления и выбора маршрута движения транспортным средством;
фиг.2 - схема дорог на выделенном участке дорожной сети;
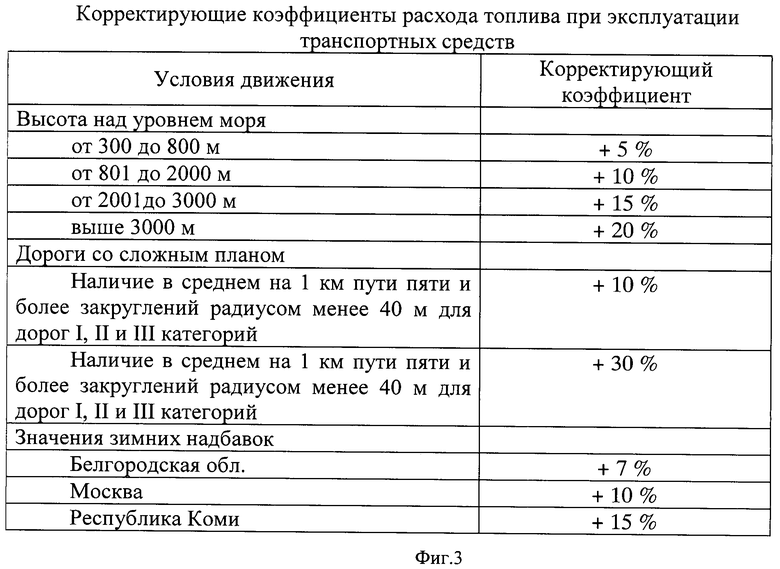
фиг.3 - коэффициенты расхода топлива при эксплуатации транспортных средств.
Заявленный способ реализуется следующим образом.
Возможность реализации способа можно показать на системе, отображенной на фиг.1, которая включает навигационную систему, размещенную на космическом объекте, центральную станцию 2, снабженную компьютером и средствами связи, метеостанцию 3, снабженную средствами связи с центральной станцией 2, службу эксплуатации дорог 4, снабженную средствами связи с центральной станцией 2, службу регулирования движения 5, снабженную средствами связи с центральной станцией 2, другие службы 6, деятельность которых влияет на движение и которые также снабжены средствами связи с ЦС 2, совокупность ТС абонентов 71, 72, …, каждое из которых снабжено средствами радиосвязи и навигации, обеспечивающими прием радиоданных по каналам 8 от спутников связи, определение своих координат и передачу данных по радиоканалу 9 на ЦС 2 о местоположении, а также прием данных от ЦС 2 о фактической и прогнозируемой ситуации на ДС.
Первоначально вводят на ЦС и ТС исходные данные. На ЦС 2 формируют МЦК, содержащую метрические (Метрика объекта описывается координатами точек в заданной системе координат, определяющей его местоположение и плановое очертание. // ГОСТ Р 51607-2000) данные выделенного региона ДС (см. фиг.2), в виде совокупности узлов 10 и ребер графа 11, соответственно представляющих перекрестки и дороги, учитывающие среднестатистическую скорость VСТ движения ТС на каждом участке дороги. Затем на ЦС 2 вводят семантические (Семантика объекта описывает его сущность и свойства. // ГОСТ Р 51607-2000) характеристики участков дорог, которые задают через корректирующие коэффициенты расхода топлива, определяющие рельеф, класс дороги, тип дорожного покрытия, ширину каждого из участков дорог ДС выделенного региона (см. фиг.2). Также на ЦС 2 задаются корректирующие коэффициенты, характеризующие климатические условия движения выделенного региона (сезон года, гололедица, ветер и т.д. и т.п.). Корректирующие коэффициенты условия движения задают таблично (фиг.3). Дополнительно в память компьютера i-го ТС вводят его характеристики, включающие имеющийся объем заправки топливом, стоимость топлива , расход топлива в зависимости от скорости движения i-го ТС и режима эксплуатации, стоимость  аренды ТС в единицу времени.
аренды ТС в единицу времени.
От ЦС по каналам радиосвязи 9 передают на ТС 71, 72, … МЦК, которую вводят в память бортового компьютера i-го ТС, где i - 1, 2, …,. Затем в бортовой компьютер i-го ТС вводят данные о его запланированном маршруте i-го ТС и передают их по каналу радиосвязи 9 на ЦС 2 для ввода в память компьютера. Дополнительно (единожды) по каналу радиосвязи на ЦС передают характеристики i-го ТС, где их вводят в память компьютера. На ЦС 2 формируют оптимальный маршрут 14 для i-го ТС в виде совокупности ребер 11, заключенных между узлами графа 10 ДС, для которого вычисляется суммарная стоимость проезда SΣ маршрута, и передают его по каналу радиосвязи 9 на i-е ТС, где отображают оптимальный маршрут и МЦК. От ТС 71, 72, … на ЦС 2 по каналу радиосвязи 9 передают сведения о фактической скорости и местоположении i-х ТС, на основании которых на ЦС 2 корректируют МЦК (см. фиг.2), с указанием наличия на ней «пробок» 12 и «антипробок» 13, транслируют откорректированную МЦК для всех ТС 71, 72, …, двигающихся в пределах выделенного региона сети, и передают по каналу радиосвязи i-му ТС откорректированный маршрут 15.
При формировании на МЦК маршрута движения i-го абонента дополнительно вычисляют возможный расход топлива и его стоимость при проезде каждого ребра дорожного графа, рассчитывают время, затрачиваемое на проезд по каждому ребру дорожного графа, и стоимость аренды i-го ТС при движении по каждому из альтернативных маршрутов, а на i-e ТС передают маршрут, обеспечивающий минимизацию суммарных затрат на проезд по нему ТС. Корректировку на МЦК маршрута i-го TC также выполняют с учетом минимизации суммарных затрат на проезд по нему i-го ТС, на котором дополнительно отображают пункты расположения автозаправочных станций.
Суммарную стоимость проезда SΣ маршрута на выделенном участке ДС вычисляют по формуле:
 ,
,
где  и - стоимость соответственно расходуемого топлива и аренды i-го ТС за время, затраченное на проезд по рекомендованному маршруту.
и - стоимость соответственно расходуемого топлива и аренды i-го ТС за время, затраченное на проезд по рекомендованному маршруту.
Для определения наличия «пробок» 12 или «антипробок» 13 на соответствующем ребре дорожного графа вычисляют разницу между среднестатистической VСТ и фактической VФ скоростями движения транспорта на этом ребре и при фиксируют наличие «пробки», а при  фиксируют наличие «антипробок», где
фиксируют наличие «антипробок», где  - предварительно заданная минимальная разница между VСТ и VФ, которая предварительно заносится в память компьютера ЦС.
- предварительно заданная минимальная разница между VСТ и VФ, которая предварительно заносится в память компьютера ЦС.
Статические «пробки» или «антипробки» на ЦС передают службы эксплуатации дорог, службы регулирования движения и др. службы, деятельность которых влияет на движение, с учетом планируемых и фактически выполняемых работ.
Расход топлива вычисляют по формуле:
Qн=0,01·HS·S·(1+0,01·К),
где Qн - нормативный расход топлива (литры), HS - базовая норма расхода топлива на пробег автомобиля (л/100 км), S - пробег автомобиля (км), К - суммарная относительная надбавка или снижение корректирующих коэффициентов к норме в процентах (фиг.3). (Нормы расхода топлива и смазочных материалов на автомобильном транспорте (РЗ112194-0366-03), утвержденные Минтрансом России 29.04.2003.)
Благодаря новой совокупности перечисленных признаков в заявленном способе реализована возможность компромиссного учета движения ТС как с точки зрения аренды автомобиля (время проезда), так и затрат, связанных с расходом топлива, что позволяет произвести выбор оптимального маршрута, обладающего минимальными суммарными затратами.
Реализация указанного способа позволит существенно снизить затраты при организации как перевозок логистическими компаниями, так и индивидуальным лицам, эксплуатирующим транспортное средство.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОЖНОЙ СЕТИ | 2014 |
|
RU2551294C1 |
| СПОСОБ ФОРМИРОВАНИЯ РЕКОМЕНДУЕМЫХ МАРШРУТОВ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ (ВАРИАНТЫ) | 2011 |
|
RU2459259C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2377658C1 |
| СПОСОБ АГРЕГАЦИИ МНОЖЕСТВЕННЫХ ПРОЕЗДОВ ПО МАРШРУТУ ДЛЯ РАСЧЁТА ОПТИМАЛЬНЫХ ПРОФИЛЕЙ СКОРОСТИ ДЛЯ ГОРОДСКОГО РЕЛЬСОВОГО ТРАНСПОРТА | 2023 |
|
RU2798951C1 |
| Способ формирования рекомендуемых маршрутов следования железнодорожных вагонов | 2020 |
|
RU2745549C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ТРАНСПОРТНЫХ СРЕДСТВ ЦЕНТРОМ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ В ВОЗДУШНОМ, НАЗЕМНОМ ПРОСТРАНСТВЕ | 2018 |
|
RU2676519C1 |
| ИМИТАЦИОННАЯ МОДЕЛЬ ДВИЖЕНИЯ ТРАНСПОРТНЫХ И ПЕШЕХОДНЫХ ПОТОКОВ В ГОРОДСКИХ УСЛОВИЯХ НА ОСНОВЕ АГЕНТНО-ОРИЕНТИРОВАННОГО ПОДХОДА | 2015 |
|
RU2601133C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 2004 |
|
RU2266571C2 |
| Система контроля транспортных средств с возможностью осуществления обратной связи | 2015 |
|
RU2633663C2 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ ТОПОГЕОДЕЗИЧЕСКОЙ ИНФОРМАЦИИ НА ОСНОВЕ ЦИФРОВЫХ КАРТ МЕСТНОСТИ (ЦКМ) | 2011 |
|
RU2452000C1 |

Изобретение относится к области автоматизированного управления движением транспортных средств (ТС). Техническим результатом при реализации способа является повышение точности определения оптимального маршрута. Предварительно на центральной станции (ЦС), снабженной средствами радиосвязи, телекоммуникационными средствами и компьютером, в память последнего вводят исходные данные о характере дорог дорожной сети выделенного региона и данные метеоусловий. На ЦС формируют модельную цифровую карту и передают ее на ТС, каждое из которых снабжено средствами радиосвязи и навигации. От ТС на ЦС передают данные о маршруте движения и характеристики ТС. На основании данных о маршруте движения и данных, получаемых от метеостанции, служб эксплуатации дорог, служб регулирования движения и других служб, деятельность которых влияет на движение, корректируют модельную цифровую карту и маршрут движения ТС с учетом минимизации суммарных затрат, необходимых для проезда маршрута на выделенном участке дорожной сети. Измененный маршрут движения передают на ТС для отображения. 7 з.п. ф-лы, 3 ил.
1. Способ определения оптимального маршрута транспортного средства, заключающийся в том, что формируют модельную цифровую карту дорожной сети в виде совокупности узлов и ребер графа, содержащих их метрические данные и представляющих соответственно перекрестки и дороги дорожной сети выделенного региона, вводят модельную цифровую карту в память компьютера центральной станции, снабженной средствами радиосвязи, и передают ее по каналам радиосвязи на транспортные средства, снабженные бортовым компьютером, средствами радиосвязи и навигации, принятую транспортными средствами модельную цифровую карту вводят в память бортового компьютера 1-го транспортного средства, где i - 1, 2, …, также в бортовой компьютер вводят данные о запланированном маршруте i-го транспортного средства и передают их по каналу радиосвязи для ввода в память компьютера центральной станции, формируют на центральной станции с учетом среднестатистической скорости VCT движения транспортного средства, определяемой семантическими характеристиками модельной цифровой карты на каждом участке дороги, оптимальный маршрут для i-го транспортного средства в виде совокупности ребер, заключенных между узлами графа дорожной сети, и передают его по каналу радиосвязи на i-е транспортное средство, где отображают оптимальный маршрут и модельную цифровую карту на компьютере транспортного средства, от транспортных средств на центральную станцию по каналам радиосвязи передают сведения о фактической скорости  и местоположении i-го транспортного средства, на основании которых на центральной станции корректируют семантические данные модельной цифровой карты с указанием наличия на ней «пробок» и «антипробок», месторасположения которых на модельной цифровой карте передают на транспортные средства, движущиеся в пределах дорожной сети выделенного региона, а также передают по каналу радиосвязи i-му транспортному средству откорректированный маршрут, отличающийся тем, что предварительно в память компьютера центральной станции вводят дополнительные семантические данные о всех дорогах на дорожной сети выделенного региона и данные о метеоусловиях на дорожной сети, в память компьютера i-го транспортного средства дополнительно вводят его характеристики и передают эти характеристики по каналу радиосвязи на центральную станцию, где их вводят в память ее компьютера, при формировании на модельной цифровой карте маршрута движения i-го транспортного средства дополнительно вычисляют возможный расход топлива при проезде каждого ребра дорожного графа, рассчитывают время, затрачиваемое на проезд по каждому ребру дорожного графа, стоимость
и местоположении i-го транспортного средства, на основании которых на центральной станции корректируют семантические данные модельной цифровой карты с указанием наличия на ней «пробок» и «антипробок», месторасположения которых на модельной цифровой карте передают на транспортные средства, движущиеся в пределах дорожной сети выделенного региона, а также передают по каналу радиосвязи i-му транспортному средству откорректированный маршрут, отличающийся тем, что предварительно в память компьютера центральной станции вводят дополнительные семантические данные о всех дорогах на дорожной сети выделенного региона и данные о метеоусловиях на дорожной сети, в память компьютера i-го транспортного средства дополнительно вводят его характеристики и передают эти характеристики по каналу радиосвязи на центральную станцию, где их вводят в память ее компьютера, при формировании на модельной цифровой карте маршрута движения i-го транспортного средства дополнительно вычисляют возможный расход топлива при проезде каждого ребра дорожного графа, рассчитывают время, затрачиваемое на проезд по каждому ребру дорожного графа, стоимость  аренды i-го транспортного средства при движении по каждому из альтернативных маршрутов и стоимость эксплуатационных расходов
аренды i-го транспортного средства при движении по каждому из альтернативных маршрутов и стоимость эксплуатационных расходов  , а на i-e транспортное средство передают оптимальный маршрут, обеспечивающий минимизацию суммарных затрат S∑ на проезд по нему транспортного средства, причем корректировку маршрута i-го транспортного средства на модельной цифровой карте выполняют с учетом минимизации суммарных затрат S∑ на проезд по нему i-го транспортного средства.
, а на i-e транспортное средство передают оптимальный маршрут, обеспечивающий минимизацию суммарных затрат S∑ на проезд по нему транспортного средства, причем корректировку маршрута i-го транспортного средства на модельной цифровой карте выполняют с учетом минимизации суммарных затрат S∑ на проезд по нему i-го транспортного средства.
2. Способ по п.1, отличающийся тем, что в качестве семантических данных дороги участка сети используют рельеф, класс дороги, тип дорожного покрытия, ширину участка дороги, соответствующие каждому ребру участка дорожной сети, а также условия проезда по каждому ребру при соответствующих метеоусловиях, которые задают в виде корректирующих коэффициентов К таблично.
3. Способ по п.1, отличающийся тем, что метеоусловия на дорожной сети передают на центральную станцию по телекоммуникационным каналам от метеостанций службы прогноза.
4. Способ по п.1, отличающийся тем, что суммарные затраты S∑, необходимые для проезда по маршруту движения, вычисляют по формуле:

5. Способ по п.1, отличающийся тем, что для определения наличия «пробок» или «антипробок» на соответствующем ребре дорожного графа вычисляют разницу между среднестатистической VCT и фактической VФ скоростями движения транспорта на этом ребре и при выполнении условия  фиксируют наличие «пробки», а при выполнении условия
фиксируют наличие «пробки», а при выполнении условия  фиксируют наличие «антипробок», где
фиксируют наличие «антипробок», где  - предварительно заданная минимальная разница между VCT и VФ, которую предварительно заносят в память компьютера центральной станции.
- предварительно заданная минимальная разница между VCT и VФ, которую предварительно заносят в память компьютера центральной станции.
6. Способ по п.1, отличающийся тем, что информацию о наличие «пробок» или «антипробок» на центральную станцию по телекоммуникационным каналам передают службы эксплуатации дорог, и/или службы регулирования движения, и/или другие службы, деятельность которых влияет на движение, с учетом планируемых и фактически выполняемых работ, ограничивающих движение на дорогах.
7. Способ по п.1, отличающийся тем, что в качестве эксплуатационных характеристик транспортного средства используют данные об имеющемся объеме заправки топливом, цену единицы объема топлива, расход топлива в зависимости от скорости движения транспортного средства и режима его эксплуатации и стоимость аренды транспортного средства в единицу времени.
8. Способ по п.1, отличающийся тем, что, на бортовом компьютере транспортного средства дополнительно отображают местоположения автозаправочных станций, станций технического обслуживания и другие объекты вдоль выбранного маршрута движения для i-го транспортного средства.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2377658C1 |
| НАВИГАЦИОННЫЙ СЕРВЕР, НАВИГАЦИОННОЕ УСТРОЙСТВО И НАВИГАЦИОННАЯ СИСТЕМА | 2007 |
|
RU2402820C1 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО, ОТОБРАЖАЮЩЕЕ ИНФОРМАЦИЮ О ДВИЖЕНИИ | 2005 |
|
RU2354935C2 |
| JP 8044997 А, 16.02.1996. | |||

