Изобретения относятся к области автоматизированного управления движением транспортных средств (ТС), заключающегося в автоматическом формировании рекомендуемых маршрутов движения ТС в составе колонн транспортных средств (КТС).
Известен способ отображения местоположения ТС на электронной карте местности в радиосистемах диспетчерского управления движением наземного транспорта (патент РФ №2207632, опубликован 27.06.2003), в котором за счет использования временных опорных точек и определения их местоположения и местоположения ТС в опорной системе координат, в качестве которой выбирают плоскую прямоугольную декартову систему координат, а также использования редукции местоположения ТС на транспортный граф, обеспечивается в конечном итоге непосредственное преобразование радионавигационных координат ТС в дисплейные координаты.
Недостаток способа состоит в том, что он не может быть применен для формирования рекомендуемых маршрутов движения КТС.
Известен способ, который реализован в автомобильном навигационном приборе, имеющем память для хранения электронной карты местности, бортовую ЭВМ, дисплей и приемник дорожной информации (патент Японии №08044997, опубликован 16.02.1996 г.). Способ заключается в том, что определяют текущие координаты ТС, вычисляют кратчайший маршрут от начальной до конечной точки и отображают его на дисплее. С помощью приемника дорожной информации получают на ТС радиосообщение с информацией о дорожных «пробках» и «затруднение в движении» на дорогах, которую отображают на дисплее изменением окраски дороги в местах «пробка» и «затруднение движения». Причем степень изменения окраски соответствует степени затруднения движения ТС.
Недостаток способа состоит в том, что он не может быть применен для автоматического формирования рекомендуемых маршрутов движения КТС.
Наиболее близким по своей технической сущности к заявленным является «Способ определения оптимального маршрута движения транспортного средства» (Патент RU 2377658, 2008, МПК G08G 1/0969 (2006.01), G01C 21/34 (2006.01), опубликован 27.12.2009 Бюл. №36), заключающийся в том, что формируют модельную электронную скоростную карту дорожной сети населенного пункта, отражающую среднестатистический скоростной режим движения на каждой дороге, которую вводят в память компьютера центральной станции (ЦС) и транслируют на компьютеры ТС абонентов по каналу радиосвязи, на ЦС получают от ТС сообщения о скоростях и местоположении находящихся в движении ТС, после чего корректируют модельную электронную скоростную карту дорожной сети населенного пункта путем внесения уточненных значений скоростей на каждой дороге, уточненную цифровую электронную карту передают абонентам и переопределяют рекомендуемый оптимальный маршрут и визуализируют на экране дисплея абонента ТС электронную карту, текущее положение ТС и предполагаемый маршрут движения ТС, в процессе движения по выбранному маршруту в случае изменения параметров электронной скоростной карты дорожной сети населенного пункта производят коррекцию оптимальных маршрутов движения до пункта назначения. Модельную электронную скоростную карту дорожной сети населенного пункта создают на базе дорожного графа, включающего сегменты линий, заключенные между узлами графа. Дорожный граф корректируют на основе информации об измененных знаках дорожного движения и данных о скоростях и местоположении ТС, получаемых ЦС от ТС по каналам радиосвязи. На основании полученных данных от ТС на ЦС формируют файлы фактических и планируемых «пробок» и «антипробок» и весов правых и левых поворотов, корректируют модельную электронную скоростную карту дорожной сети населенного пункта.
Недостатком ближайшего аналога является узкая область его применения, так как рекомендуемый маршрут движения может быть сформирован только для одиночного ТС, в то время как для ТС в составе нескольких КТС ближайший аналог не применим.
Техническим результатом изобретения является расширение области применения способа, то есть для формирования рекомендуемых маршрутов движения как для одиночных ТС, так и для нескольких КТС с учетом их рангов приоритета, установленных минимальной и максимальной скоростей.
Указанный технический результат в первом варианте достигается тем, что в известном способе формирования рекомендуемых маршрутов движения ТС, заключающемся в том, что формируют модельную цифровую карту дорожной сети в виде совокупности вершин и ребер графа, представляющих соответственно перекрестки и дороги реальной дорожной сети, модельную цифровую карту вводят в память компьютера ЦС, снабженной средствами радиосвязи, и передают ее по каналам радиосвязи на ТС, снабженные компьютером, средствами радиосвязи и навигации, с ТС передают по каналам радиосвязи на ЦС данные о своих начальной и конечной вершинах на модельной цифровой карте дорожной сети, подлежащих проезду, на основе этих данных в компьютере ЦС формируют рекомендуемые маршруты движения из начальной вершины в конечную вершину и по каналам радиосвязи передают их на соответствующие ТС, где на модельной цифровой карте посредством монитора визуализируют рекомендуемые маршруты движения и текущее положение ТС. Рекомендуемые маршруты движения формируют для движения K колонн транспортных средств, которые предварительно ранжируют в соответствии с рангом их приоритета. Вводят в память компьютера ЦС данные о характеристиках КТС, включающих ранг приоритета prk, где k=1, 2, …, K, каждой КТС, ее максимально  и минимально
и минимально  допустимые скорости движения, длину Lk КТС, определяемую количеством Nk и длиной
допустимые скорости движения, длину Lk КТС, определяемую количеством Nk и длиной  отдельных ТС, составляющих k-ю КТС, и предполагаемой дистанцией dk между ними. От каждой КТС на ЦС передают данные о запланированном времени прибытия
отдельных ТС, составляющих k-ю КТС, и предполагаемой дистанцией dk между ними. От каждой КТС на ЦС передают данные о запланированном времени прибытия  в конечную вершину и времени начала движения k-й КТС из начальной вершины. Для КТС, имеющей наивысший ранг приоритета prmax, формируют рекомендуемый маршрут движения, рассчитывают время занятости каждой вершины графа дорожной сети проезжающей по ним КТС с наивысшим рангом приоритета prmax, и запоминают это время в памяти компьютера ЦС. Последовательно, в соответствии с рангом приоритета КТС, для k-й КТС формируют рекомендуемый маршрут движения и передают его по каналам радиосвязи от компьютера ЦС для визуализации на компьютер головного ТС k-й КТС. Дополнительно организуют принудительное регулирование движения других ТС, перемещающихся вне состава КТС, предотвращающее возникновение помех и «пробок» на сформированных рекомендуемых маршрутах движения для колонн транспортных средств. Рекомендуемый маршрут движения k-й КТС формируют с учетом ранее установленных для нее значений минимальной и максимальной
в конечную вершину и времени начала движения k-й КТС из начальной вершины. Для КТС, имеющей наивысший ранг приоритета prmax, формируют рекомендуемый маршрут движения, рассчитывают время занятости каждой вершины графа дорожной сети проезжающей по ним КТС с наивысшим рангом приоритета prmax, и запоминают это время в памяти компьютера ЦС. Последовательно, в соответствии с рангом приоритета КТС, для k-й КТС формируют рекомендуемый маршрут движения и передают его по каналам радиосвязи от компьютера ЦС для визуализации на компьютер головного ТС k-й КТС. Дополнительно организуют принудительное регулирование движения других ТС, перемещающихся вне состава КТС, предотвращающее возникновение помех и «пробок» на сформированных рекомендуемых маршрутах движения для колонн транспортных средств. Рекомендуемый маршрут движения k-й КТС формируют с учетом ранее установленных для нее значений минимальной и максимальной  скоростей и занятости вершин графа дорожной сети проезжающими по ним КТС с более высокими рангами приоритета.
скоростей и занятости вершин графа дорожной сети проезжающими по ним КТС с более высокими рангами приоритета.
Благодаря перечисленной новой совокупности существенных признаков в первом варианте заявленного способа реализована возможность последовательного формирования рекомендуемых маршрутов движения ТС в составе КТС, обеспечивающих проезд КТС без взаимных помех и учитывающих как ранг их приоритета, так и установленные для них скорости движения.
Указанный технический результат во втором варианте достигается тем, что в известном способе формирования рекомендуемых маршрутов движения ТС, заключающегося в том, что формируют модельную цифровую карту дорожной сети в виде совокупности вершин и ребер графа, представляющих соответственно перекрестки и дороги реальной дорожной сети, модельную цифровую карту вводят в память компьютера ЦС, снабженной средствами радиосвязи, и передают ее по каналам радиосвязи на ТС, снабженные компьютером, средствами радиосвязи и навигации, с ТС передают по каналам радиосвязи на ЦС данные о своих начальной и конечной вершинах на модельной цифровой карте дорожной сети, подлежащих проезду, на основе этих данных в компьютере ЦС формируют рекомендуемые маршруты движения из начальной вершины в конечную вершину и по каналам радиосвязи передают их на соответствующие ТС, где на модельной цифровой карте посредством монитора визуализируют рекомендуемые маршруты движения и текущее положение ТС. Рекомендуемые маршруты движения формируют для движения К колонн транспортных средств, которые предварительно ранжируют в соответствии с рангом их приоритета, далее вводят в память компьютера ЦС данные о характеристиках КТС, включающие ранг приоритета prk, где k=1, 2, …, K, каждой КТС, ее максимально  и минимально допустимые скорости движения, длину Lk, КТС, определяемую количеством Nk и длиной
и минимально допустимые скорости движения, длину Lk, КТС, определяемую количеством Nk и длиной  отдельных ТС, составляющих k-ю КТС, и предполагаемой дистанцией dk между ними. От каждой КТС на ЦС передают данные о запланированном времени прибытия
отдельных ТС, составляющих k-ю КТС, и предполагаемой дистанцией dk между ними. От каждой КТС на ЦС передают данные о запланированном времени прибытия  в конечную вершину и времени начала движения k-й КТС из начальной вершины. Для каждой k-й КТС формируют по Q≥2 наименее протяженных предварительных маршрутов протяженностью
в конечную вершину и времени начала движения k-й КТС из начальной вершины. Для каждой k-й КТС формируют по Q≥2 наименее протяженных предварительных маршрутов протяженностью  где q=1,2,…, Q, из которых один кратчайший
где q=1,2,…, Q, из которых один кратчайший  . Выполняют перебор возможных комбинаций маршрутов R=QK. В каждой комбинации маршрутов вычисляют время прибытия
. Выполняют перебор возможных комбинаций маршрутов R=QK. В каждой комбинации маршрутов вычисляют время прибытия  k-й КТС в свою конечную вершину и сравнивают
k-й КТС в свою конечную вершину и сравнивают  с запланированным
с запланированным  . При
. При  число 0 предварительных маршрутов последовательно увеличивают на единицу до тех пор, пока будет выполнено условие
число 0 предварительных маршрутов последовательно увеличивают на единицу до тех пор, пока будет выполнено условие  для каждой k-й КТС в r-й комбинации маршрутов, где r=1,2,…, R. После чего перебор комбинаций маршрутов завершают, а рекомендуемые маршруты движения r-й комбинации маршрутов передают по каналам радиосвязи для визуализации на компьютере головного ТС k-й КТС. Дополнительно организуют принудительное регулирование движения других ТС, перемещающихся вне состава КТС, предотвращающее возникновение помех и «пробок» на сформированных рекомендуемых маршрутах движения для колонн транспортных средств. В r-й комбинации маршрутов время прибытия в свою конечную вершину
для каждой k-й КТС в r-й комбинации маршрутов, где r=1,2,…, R. После чего перебор комбинаций маршрутов завершают, а рекомендуемые маршруты движения r-й комбинации маршрутов передают по каналам радиосвязи для визуализации на компьютере головного ТС k-й КТС. Дополнительно организуют принудительное регулирование движения других ТС, перемещающихся вне состава КТС, предотвращающее возникновение помех и «пробок» на сформированных рекомендуемых маршрутах движения для колонн транспортных средств. В r-й комбинации маршрутов время прибытия в свою конечную вершину  первоначально вычисляют для КТС, имеющей наивысший ранг приоритета prmax, затем время занятости каждой вершины графа дорожной сети проезжающей по ним КТС с наивысшим рангом приоритета prmax запоминают в памяти компьютера ЦС, после чего последовательно, в соответствии с рангом приоритета КТС и с учетом ранее установленных для каждой КТС значений минимальной и максимальной
первоначально вычисляют для КТС, имеющей наивысший ранг приоритета prmax, затем время занятости каждой вершины графа дорожной сети проезжающей по ним КТС с наивысшим рангом приоритета prmax запоминают в памяти компьютера ЦС, после чего последовательно, в соответствии с рангом приоритета КТС и с учетом ранее установленных для каждой КТС значений минимальной и максимальной  скоростей, а также занятости вершин графа дорожной сети проезжающими по ним КТС с более высокими рангами приоритета вычисляют время прибытия
скоростей, а также занятости вершин графа дорожной сети проезжающими по ним КТС с более высокими рангами приоритета вычисляют время прибытия  в свою конечную вершину остальных КТС, движущихся по маршрутам, определенным r-й комбинацией маршрутов.
в свою конечную вершину остальных КТС, движущихся по маршрутам, определенным r-й комбинацией маршрутов.
Благодаря перечисленной новой совокупности существенных признаков во втором варианте заявленного способа реализована возможность формирования рекомендуемых маршрутов движения ТС в составе КТС с соблюдением требуемого времени прибытия в пункт назначения каждой КТС, при одновременном учете ранга приоритета КТС и установленной для них скорости движения.
Заявленные способы поясняются чертежами, на которых показаны:
фиг.1 - общая структурная схема управления и формирования рекомендуемых маршрутов движения КТС;
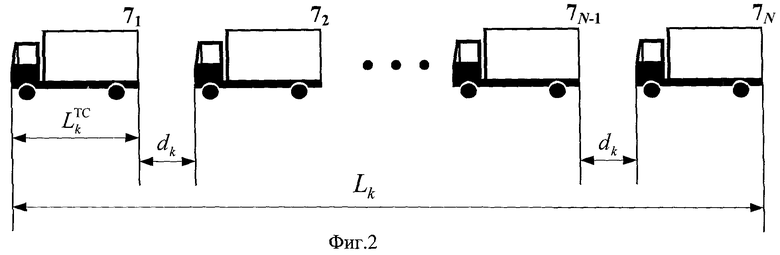
фиг.2 - основные характеристики КТС;
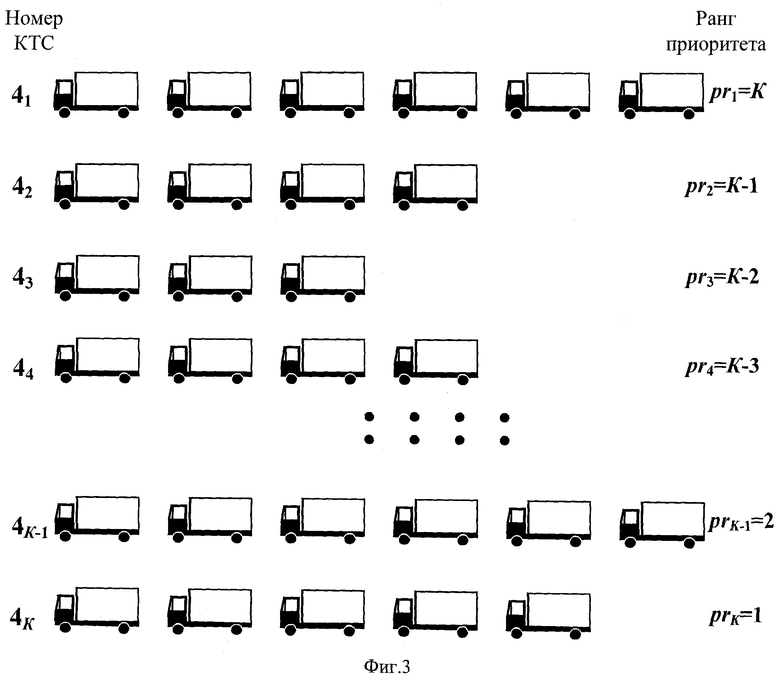
фиг.3 - распределение рангов приоритета между КТС;
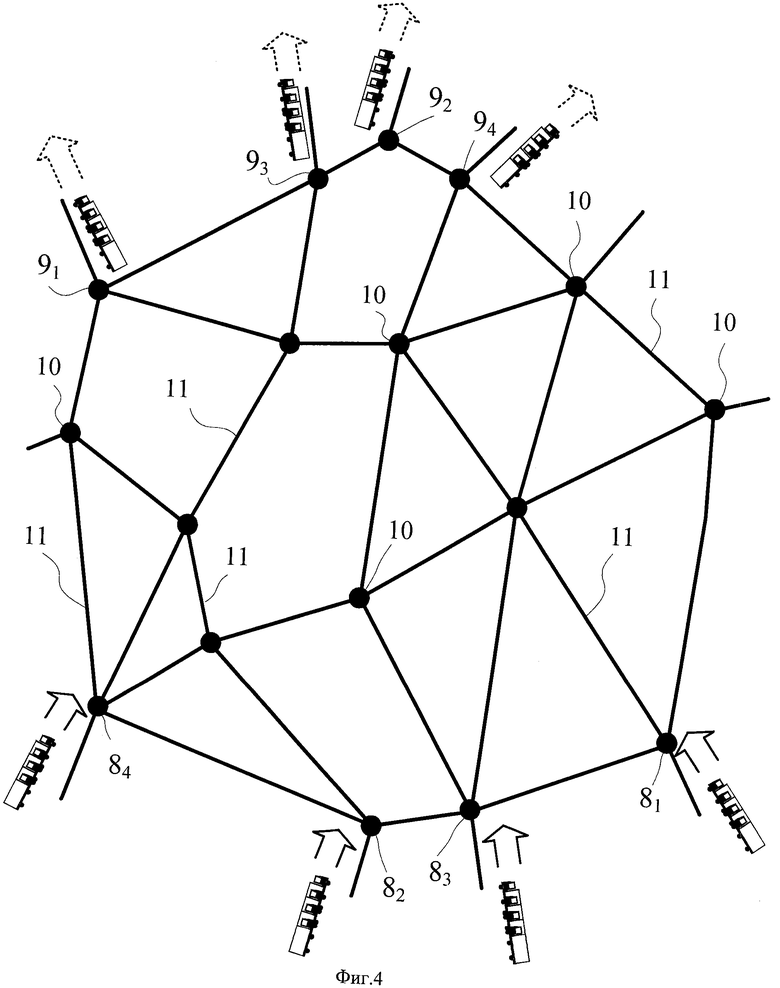
фиг.4 - схема дорог на выделенном участке дорожной сети;
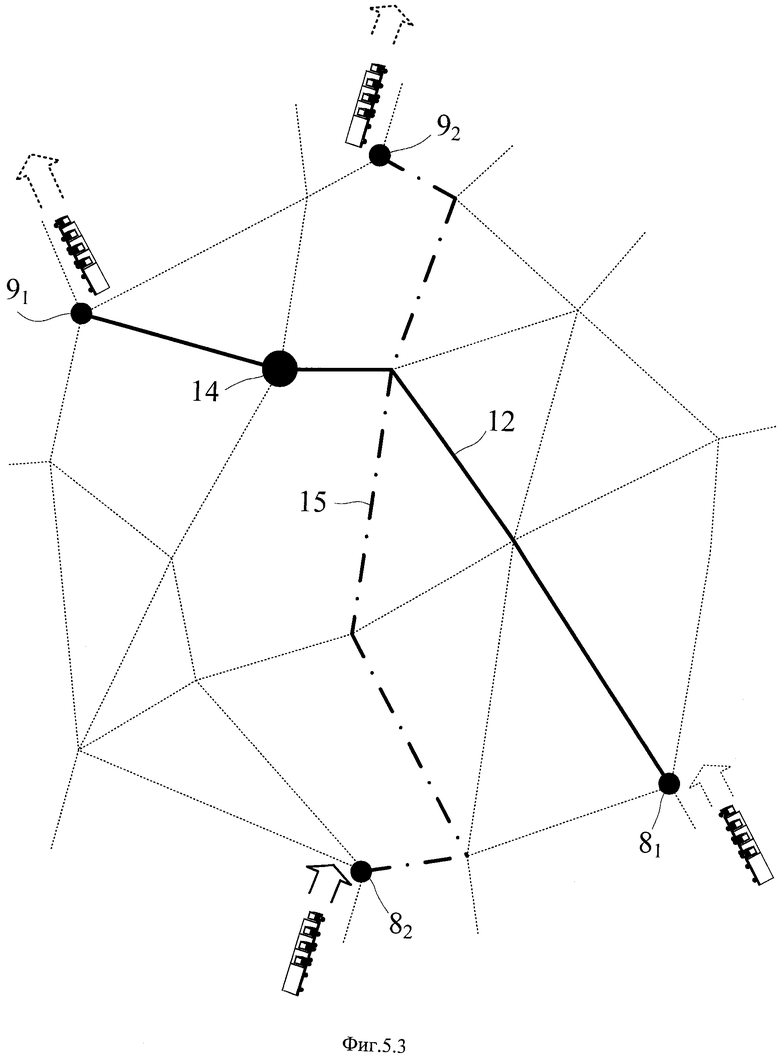
фиг.5.1, 5.2, 5.3 - варианты формирования рекомендуемых маршрутов движения на выделенном участке дорожной сети;
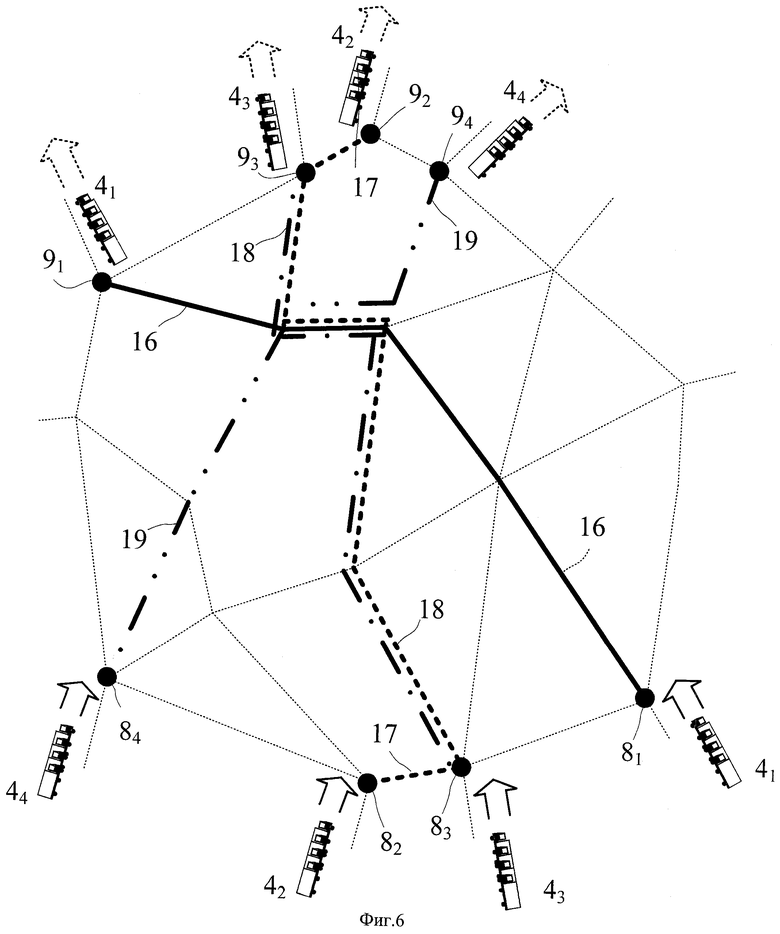
фиг.6 - кратчайшие маршруты КТС на выделенном участке дорожной сети;
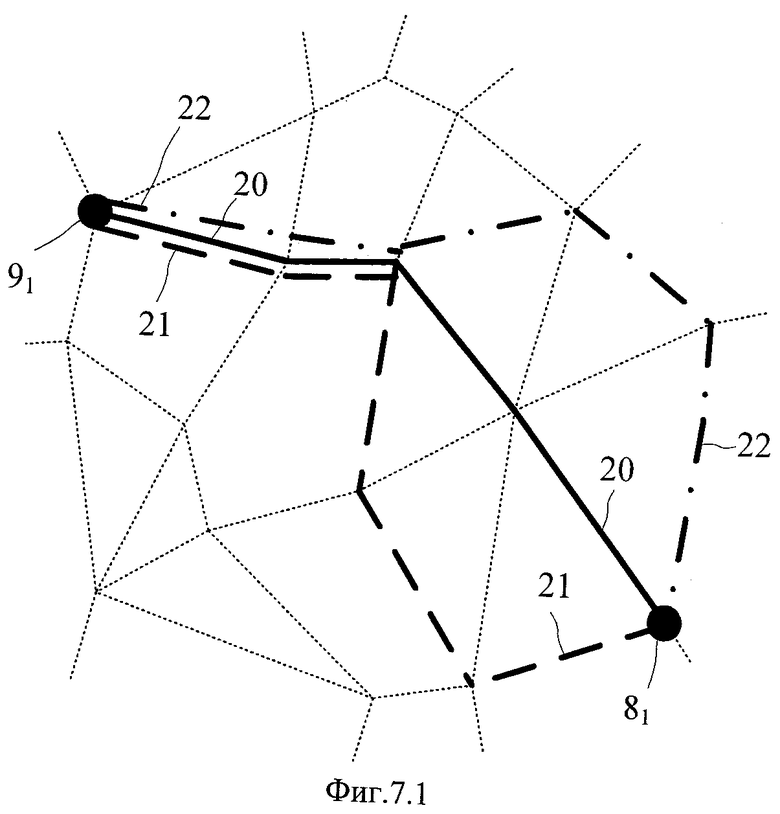
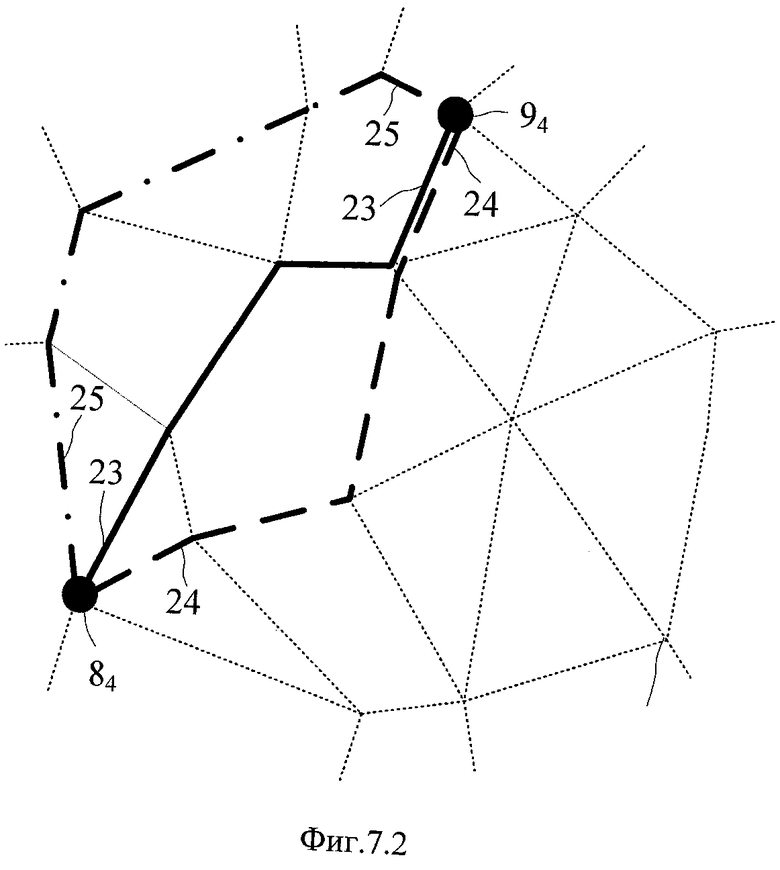
фиг.7.1, 7.2 - варианты формирования трех предварительных маршрутов КТС;
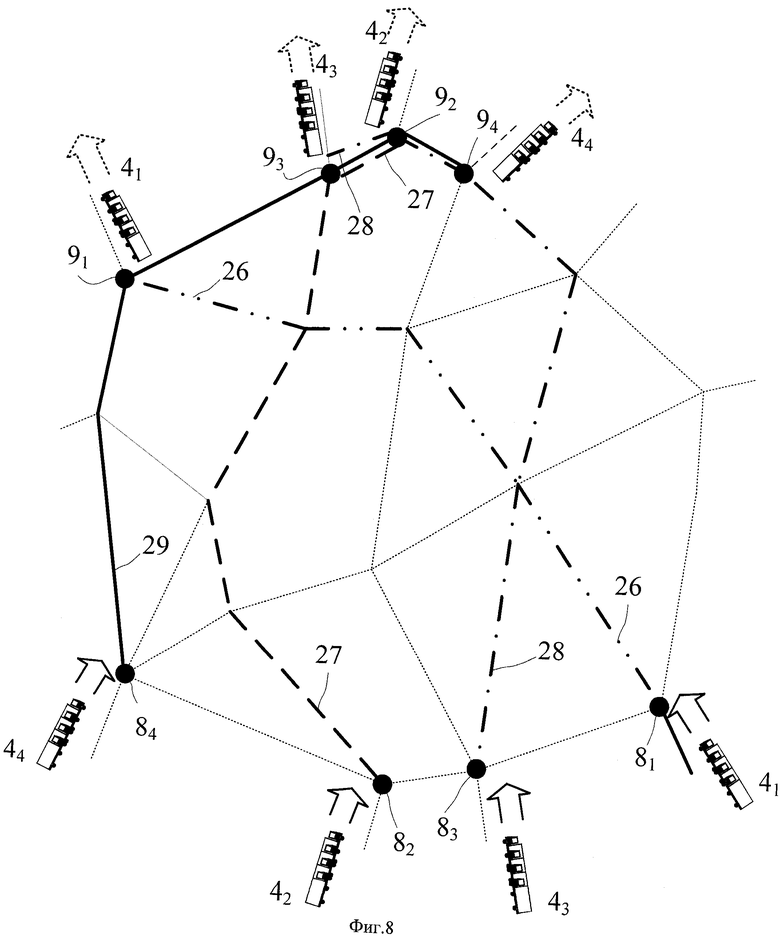
фиг.8 - вариант формирования рекомендуемых маршрутов движения КТС.
Заявленный способ в первом варианте реализуют следующим образом.
Возможность реализации способа в первом варианте можно показать на системе, отображенной на фиг.1, которая включает навигационную систему, размещенную на космическом объекте 1, ЦС 2, снабженную компьютером и средствами связи, службу регулирования движения 3, снабженную средствами связи с ЦС 2, множество K КТС 41,42,…, 4K, каждая из которых снабжена средствами радиосвязи и навигации, обеспечивающими прием радиоданных по каналам 51,52,…, 5K от спутников связи, определение своих координат и передачу данных по радиоканалам 61,62,…, 6K на ЦС 2 о местоположении, а также прием данных от ЦС 2 о сформированных рекомендуемых маршрутах движения.
Первоначально вводят на ЦС 2 и КТС 41,42,…, 4K исходные данные. В компьютер головного ТС 7 k-й КТС 4k вводят ее основные характеристики (см. фиг.2): длину ТС  , количество ТС 7 Nk и предполагаемую дистанцию dk между ТС 7 в k-й колонне 4k; максимально
, количество ТС 7 Nk и предполагаемую дистанцию dk между ТС 7 в k-й колонне 4k; максимально  и минимально допустимые скорости движения, а также (см. фиг.4) начальные 8k и конечные 9k вершины на модельной цифровой карте дорожной сети подлежащих проезду k-х КТС 4k, запланированное время прибытия в конечную 9 вершину
и минимально допустимые скорости движения, а также (см. фиг.4) начальные 8k и конечные 9k вершины на модельной цифровой карте дорожной сети подлежащих проезду k-х КТС 4k, запланированное время прибытия в конечную 9 вершину  .
.
На ЦС 2 формируют модельную цифровую карту дорожной сети в виде совокупности вершин 10 и ребер 11 графа дорожной сети, представляющих соответственно перекрестки и дороги реальной дорожной сети.
От ЦС 2 по каналам радиосвязи 6 передают на КТС 41,42,…, 4K модельную цифровую карту дорожной сети, которую вводят в память компьютера головного ТС 7 k-й КТС 4k. На ЦС 2 от k-й КТС 4k по каналам радиосвязи 6 передают ее основные характеристики, данные о начальной 8k и конечной 9k вершинах, запланированном времени прибытия  в конечную 9k вершину, времени начала движения из начальной 8k вершины, а также максимально
в конечную 9k вершину, времени начала движения из начальной 8k вершины, а также максимально  и минимально допустимые скорости движения.
и минимально допустимые скорости движения.
В компьютере ЦС 2 на основе данных о начальных 8k и конечных 9k вершинах, времени начала движения и запланированном времени прибытия все КТС 4 ранжируют в соответствии с рангом приоритета prk (см. фиг.3). В память компьютера ЦС 2 для каждой k-й КТС 4k записывают значение ранга приоритета prk и длину Lk каждой k-й КТС 4k, рассчитанную с использованием значений основных характеристик k-й КТС 4k на основании формулы:
 .
.
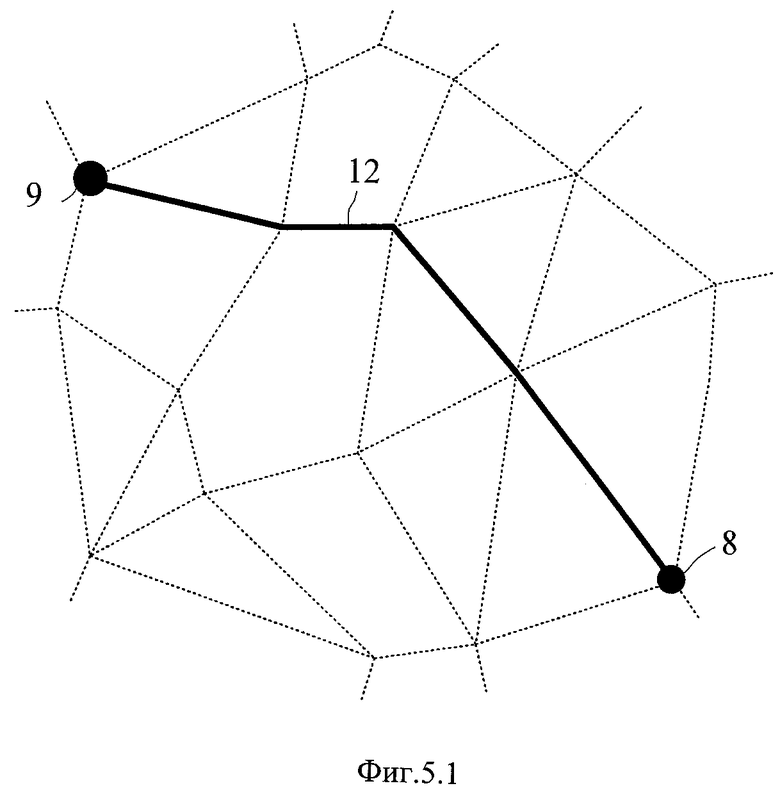
После чего (см. фиг.5.1) для КТС 41, имеющей наивысший ранг приоритета prmax=pr1=K, формируют рекомендуемый маршрут 12 движения из начальной 81 в конечную 91 вершину. Поочередно, рассчитывая время проезда каждой вершины 10 и каждого ребра 11 графа дорожной сети сформированного рекомендуемого маршрута 12 движения, определяют время занятости каждой вершины маршрута 12, которое показывает на каком временном интервале вершина занята проездом по ней KTC 41. Время занятости вершин рекомендуемого маршрута и рекомендуемый маршрут 12 движения КТС 41 записывают в память компьютера ЦС 2.
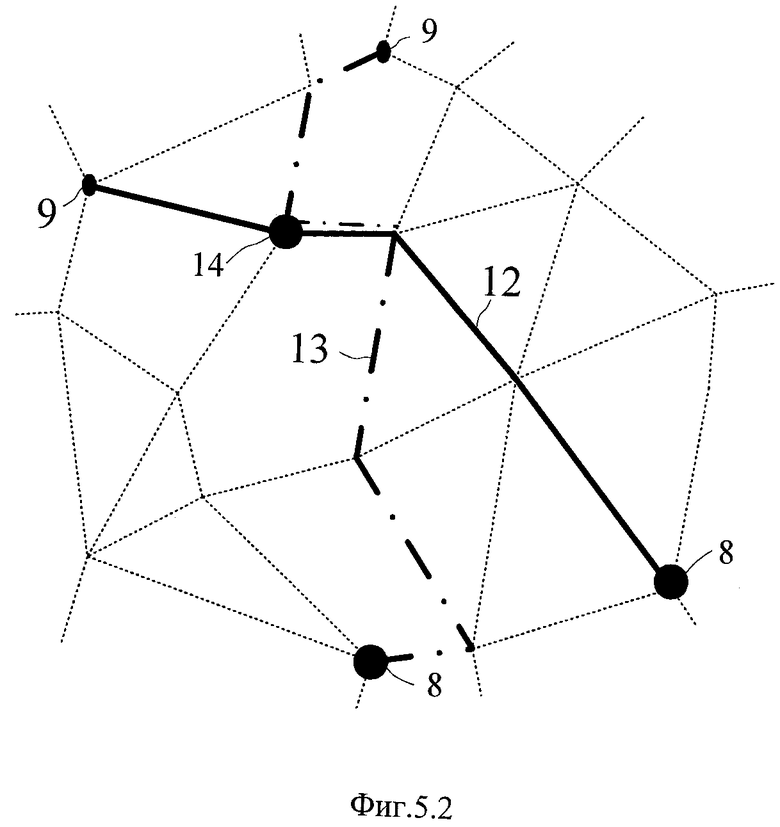
Затем (см. фиг.5.2) для КТС 42, имеющей ранг приоритета pr2=K-1, формируют рекомендуемый маршрут движения 13 из начальной 82 в конечную 92 вершину. При этом учитывают время занятости вершин проездом через них КТС 41, а также максимально  и минимально допустимые скорости движения КТС 42. Если КТС 42, следуя по маршруту, будет проезжать через вершину 14 на временном интервале Δt2, не создавая помех для движения КТС 41, которая занимает вершину 14 на временном интервале Δt1, то есть Δt1 и Δt2 не пересекаются (Δt1∩Δt2=⌀), то формируют рекомендуемый маршрут 13 движения, отображенный на фиг.5.2. Если же КТС 42 будет создавать помеху для движения KTC 41 - Δt1∩Δt2≠⌀, то для КТС 42 (см. фиг.5.3) из начальной 82 в конечную 92 вершину формируют рекомендуемый маршрут 15. Рекомендуемый маршрут 15 движения не включает в себя вершину 14, то есть КТС 42, двигаясь по рекомендуемому маршруту 15, не создаст помех для движения KTC 41. Время занятости вершин рекомендуемого маршрута и рекомендуемый маршрут 15 движения КТС 42 записывают в память компьютера ЦС 2.
и минимально допустимые скорости движения КТС 42. Если КТС 42, следуя по маршруту, будет проезжать через вершину 14 на временном интервале Δt2, не создавая помех для движения КТС 41, которая занимает вершину 14 на временном интервале Δt1, то есть Δt1 и Δt2 не пересекаются (Δt1∩Δt2=⌀), то формируют рекомендуемый маршрут 13 движения, отображенный на фиг.5.2. Если же КТС 42 будет создавать помеху для движения KTC 41 - Δt1∩Δt2≠⌀, то для КТС 42 (см. фиг.5.3) из начальной 82 в конечную 92 вершину формируют рекомендуемый маршрут 15. Рекомендуемый маршрут 15 движения не включает в себя вершину 14, то есть КТС 42, двигаясь по рекомендуемому маршруту 15, не создаст помех для движения KTC 41. Время занятости вершин рекомендуемого маршрута и рекомендуемый маршрут 15 движения КТС 42 записывают в память компьютера ЦС 2.
Кроме объезда (исключения из маршрута) вершины маршрута, на которой k-я КТС КТС 4k создает помеху для движения других КТС 4 с более высокими рангами приоритета, допускается варьирование скоростью движения k-й КТС 4k на ребрах графа дорожной сети, предшествующих вышеуказанной вершине в рекомендуемом маршруте движения. Варьирование скорости движения k-й КТС 4k допускается в пределах минимальной и максимальной  скоростей. Изменение скорости движения направлено на то, чтобы k-я КТС 4k могла проехать через "занятую" вершину, после ее "освобождения", проезжающей по ней КТС 4 с более высоким рангом приоритета.
скоростей. Изменение скорости движения направлено на то, чтобы k-я КТС 4k могла проехать через "занятую" вершину, после ее "освобождения", проезжающей по ней КТС 4 с более высоким рангом приоритета.
Далее последовательно в соответствии рангами приоритета КТС 4, учитывая время занятости вершин графа дорожной сети КТС 4 с более высоким рангом приоритета, формируют рекомендуемые маршруты движения для остальных КТС 4.
От ЦС 2 по каналам радиосвязи 6 на каждое головное ТС 7 k-й КТС 4k передают соответствующий рекомендуемый маршрут движения. На модельной цифровой карте посредством монитора компьютера головного ТС 7 визуализируют рекомендуемый маршрут движения.
С целью предотвращения возникновения помех при движении КТС 4 по сформированным рекомендуемым маршрутам со стороны ТС 7, перемещающихся вне состава КТС 4, силами службы регулирования движения 3 организуют принудительное регулирование движения. Регулирование заключается в освобождении участков дорог на время проезда по ним КТС 4, движущихся по сформированным рекомендуемым маршрутам, от одиночных ТС 7.
Благодаря новой совокупности перечисленных признаков в заявленном способе в первом варианте реализована возможность последовательного формирования рекомендуемых маршрутов движения КТС 4 с учетом их взаимного влияния на условия перемещения.
Реализация способа в первом варианте позволит спланировать перемещения КТС 4 таким образом, что движение всех КТС 4 будет осуществляться со скоростью в заданных пределах.
Заявленный способ во втором варианте реализуют следующим образом.
Возможность реализации способа во втором варианте можно показать на системе, отображенной на фиг.1, которая включает навигационную систему, размещенную на космическом объекте 1, ЦС 2, снабженную компьютером и средствами связи, службу регулирования движения 3, снабженную средствами связи с ЦС 2, множество K КТС 41,42,…, 4K, каждая из которых снабжена средствами радиосвязи и навигации, обеспечивающими прием радиоданных по каналам 51,52,…, 5K от спутников связи, определение своих координат и передачу данных по радиоканалам 61,62,…, 6K на ЦС 2 о местоположении, а также прием данных от ЦС 2 о сформированных рекомендуемых маршрутах движения.
Первоначально вводят на ЦС 2 и КТС 41,42,… 4K исходные данные. В компьютер головного ТС 7 k-й КТС 4k вводят ее основные характеристики (см. фиг.2): длину ТС 7  , количество ТС 7 Nk и предполагаемую дистанцию dk между ТС 7 в k-й колонне 4k; максимально
, количество ТС 7 Nk и предполагаемую дистанцию dk между ТС 7 в k-й колонне 4k; максимально  и минимально допустимые скорости движения, а также (см. фиг.4) начальные 8k и конечные 9k вершины k-x КТС 4k, запланированное время прибытия в конечную 9k вершину
и минимально допустимые скорости движения, а также (см. фиг.4) начальные 8k и конечные 9k вершины k-x КТС 4k, запланированное время прибытия в конечную 9k вершину  .
.
На ЦС 2 формируют модельную цифровую карту дорожной сети в виде совокупности вершин 10 и ребер 11 графа дорожной сети, представляющих соответственно перекрестки и дороги реальной дорожной сети.
От ЦС 2 по каналам радиосвязи 6 передают на КТС 41,42,…, 4K модельную цифровую карту дорожной сети, которую вводят в память компьютера головного ТС 7 k-й КТС 4k. На ЦС 2 от k-й КТС 4k по каналам радиосвязи 6 передают ее основные характеристики, данные о начальной 8k и конечной 9k вершинах на модельной цифровой карте дорожной сети, подлежащих проезду, запланированном времени прибытия  в конечную 9k, вершину, времени начала движения из начальной 8k вершины, а также максимально
в конечную 9k, вершину, времени начала движения из начальной 8k вершины, а также максимально  и минимально допустимые скорости движения.
и минимально допустимые скорости движения.
В компьютере ЦС 2 на основе данных о начальных 8k и конечных 9k, вершинах, времени начала движения и запланированном времени прибытия все КТС 4 ранжируют в соответствии с рангом приоритета prk (см. фиг.3). В память компьютера ЦС 2 для каждой k-й КТС 4k записывают значение ранга приоритета prk и длину Lk каждой k-й КТС 4k, рассчитанную с использованием значений основных характеристик k-й КТС 4k на основании формулы:
 .
.
После чего для каждой k-й КТС 4k формируют по Q≥2 наименее протяженных предварительных маршрутов протяженностью  , где q=1,2,…, Q, из которых один кратчайший
, где q=1,2,…, Q, из которых один кратчайший  . Порядок расчета подобных маршрутов известен, смотри Н.Кристофидес, Теория графов. Алгоритмический подход. «Мир», 1978. Глава 8.5. Нахождение К кратчайших путей между двумя заданными вершинами. С.193-196.
. Порядок расчета подобных маршрутов известен, смотри Н.Кристофидес, Теория графов. Алгоритмический подход. «Мир», 1978. Глава 8.5. Нахождение К кратчайших путей между двумя заданными вершинами. С.193-196.
На фиг.6 отображены кратчайшие маршруты  16,
16,  17,
17,  18 и
18 и  19 КТС 41, 42, 43, 44 из их начальных 81, 82, 83, 84 вершин в соответствующие конечные 91, 92, 93, 94 вершины.
19 КТС 41, 42, 43, 44 из их начальных 81, 82, 83, 84 вершин в соответствующие конечные 91, 92, 93, 94 вершины.
На фиг.7.1 отображены предварительные маршруты  20,
20,  21 и
21 и  22 КТС 41 из начальной 81 вершины в конечную 91 вершину. Причем маршрут
22 КТС 41 из начальной 81 вершины в конечную 91 вершину. Причем маршрут  20 является кратчайшим и
20 является кратчайшим и  .
.
На фиг.7.2 отображены предварительные маршруты  23,
23,  24 и
24 и  25 КТС 44 из начальной 84 вершины в конечную 94 вершину. Причем маршрут
25 КТС 44 из начальной 84 вершины в конечную 94 вершину. Причем маршрут  23 является кратчайшим и
23 является кратчайшим и 
Затем составляют R=QK возможных комбинаций маршрутов. В примере (см. фиг.6, 7.1 и 7.2) представлено четыре КТС 41, 42, 43, 44, для каждой КТС 4 формируют по три предварительных маршрута (Q=3), следовательно, количество возможных комбинаций маршрутов будет равно: R=34=81. Запись комбинации маршрутов, состоящих из кратчайших маршрутов для каждой k-й КТС 4k имеет вид:  . Запись всех возможных комбинаций маршрутов имеет вид:
. Запись всех возможных комбинаций маршрутов имеет вид:
 ,
,  ,
,
 ,
,  ,…,
,…,
 .
.
Далее выполняют перебор возможных комбинаций маршрутов, вычисляя в каждой комбинации время прибытия  всех КТС 41, 42, 43, 44 в свои конечные вершины 91, 92, 93, 94. В r-й комбинации маршрутов, где r=1, 2, …, R, для КТС 41, имеющей наивысший ранг приоритета prmax=pr1=K, рассчитывают время проезда каждой вершины и каждого ребра q-го предварительного маршрута КТС 41, определяют время прибытия
всех КТС 41, 42, 43, 44 в свои конечные вершины 91, 92, 93, 94. В r-й комбинации маршрутов, где r=1, 2, …, R, для КТС 41, имеющей наивысший ранг приоритета prmax=pr1=K, рассчитывают время проезда каждой вершины и каждого ребра q-го предварительного маршрута КТС 41, определяют время прибытия  в конечную вершину 91 и время занятости каждой вершины графа дорожной сети, входящей в q-й предварительный маршрут КТС 41. Время занятости вершины показывает на каком временном интервале вершина занята проездом по ней КТС 41. Время занятости вершин входящих в q-й предварительный маршрут КТС 41 записывают в память компьютера ЦС 2.
в конечную вершину 91 и время занятости каждой вершины графа дорожной сети, входящей в q-й предварительный маршрут КТС 41. Время занятости вершины показывает на каком временном интервале вершина занята проездом по ней КТС 41. Время занятости вершин входящих в q-й предварительный маршрут КТС 41 записывают в память компьютера ЦС 2.
После чего для КТС 43, имеющей ранг приоритета pr2=К-1, определяют времена занятости вершин, входящих в q-й предварительный маршрут КТС 42 из r-й комбинации маршрутов, и сверяют их с интервалами занятости вершин предварительного маршрута КТС 41. Если КТС 42, следуя по q-му предварительному маршруту (см. фиг.5.2), будет проезжать через вершину 14 на временном интервале Δt2, не создавая помех для движения KTC 41, которая занимает вершину 14 на временном интервале Δt1 то есть Δt1 и Δt2 не пересекаются (Δt1∩Δt2=⌀), то вычисляют время прибытия  в конечную 92 вершину для KTC 42, а время занятости вершин, входящих в q-й предварительный маршрут KTC 42 из r-й комбинации маршрутов, записывают в память компьютера ЦС 2.
в конечную 92 вершину для KTC 42, а время занятости вершин, входящих в q-й предварительный маршрут KTC 42 из r-й комбинации маршрутов, записывают в память компьютера ЦС 2.
Последовательно в соответствии приоритетами KTC 4, проверяя отсутствие пересечения временных интервалов k-й KTC 4k с интервалами KTC 4 более высоких рангов приоритета (Δtk∩Δtk-1=⌀, где r=1,2,…, k-1), вычисляют времена прибытия  остальных KTC 4 в свои конечные вершины 9, а времена занятости вершин, входящих в q-е предварительные маршруты из r-й комбинации маршрутов, записывают в память компьютера ЦС 2. При проверке отсутствия пересечения временных интервалов для k-й колонны 4k ее временные интервалы сравнивают со всеми временными интервалами KTC 4 более высокого ранга приоритета - 41,42,…, 4K-1.
остальных KTC 4 в свои конечные вершины 9, а времена занятости вершин, входящих в q-е предварительные маршруты из r-й комбинации маршрутов, записывают в память компьютера ЦС 2. При проверке отсутствия пересечения временных интервалов для k-й колонны 4k ее временные интервалы сравнивают со всеми временными интервалами KTC 4 более высокого ранга приоритета - 41,42,…, 4K-1.
Если же k-я KTC 4k будет создавать помеху для движения KTC 4 с более высокими рангами приоритета - Δtk∩Δtk-1≠⌀, а варьирование скоростью движения k-й KTC 4k в пределах минимальной  и максимальной
и максимальной  скоростей на ребрах графа дорожной сети, предшествующих вышеуказанной вершине в q-м предварительном маршруте из r-й комбинации маршрутов, с целью устранения помехи (проезд через "занятую" вершину, после ее "освобождения" проезжающей по ней KTC 4 с более высоким рангом приоритета) не приводит к требуемому результату, то время прибытия k-й KTC 4k в ее конечную вершину 9k считают большим, чем запланированное время прибытия
скоростей на ребрах графа дорожной сети, предшествующих вышеуказанной вершине в q-м предварительном маршруте из r-й комбинации маршрутов, с целью устранения помехи (проезд через "занятую" вершину, после ее "освобождения" проезжающей по ней KTC 4 с более высоким рангом приоритета) не приводит к требуемому результату, то время прибытия k-й KTC 4k в ее конечную вершину 9k считают большим, чем запланированное время прибытия  .
.
После вышеуказанных расчетов в r-й комбинации маршрутов сверяют полученные времена прибытия каждой k-й KTC 4k  в свою конечную вершину 9k с запланированными временами прибытия каждой k-й KTC 4k
в свою конечную вершину 9k с запланированными временами прибытия каждой k-й KTC 4k  . Если выполняется неравенство
. Если выполняется неравенство  хотя бы для одного q-го маршрута из в r-й комбинации маршрутов, то переходят к оценке очередной (r+1)-й комбинации маршрутов.
хотя бы для одного q-го маршрута из в r-й комбинации маршрутов, то переходят к оценке очередной (r+1)-й комбинации маршрутов.
Если ни в одной из R=QK возможных комбинаций маршрутов не выполняется условие  для каждой k-й КТС 4k, то число Q предварительных маршрутов последовательно увеличивают на единицу до тех пор, пока будет выполнено условие
для каждой k-й КТС 4k, то число Q предварительных маршрутов последовательно увеличивают на единицу до тех пор, пока будет выполнено условие  для каждой k-й КТС 4k в r-й комбинации маршрутов. На фиг.8 изображен вариант рекомендуемых маршрутов движения КТС 4, при которых для всех четырех КТС 41, 42, 43, 44 выполнено условие
для каждой k-й КТС 4k в r-й комбинации маршрутов. На фиг.8 изображен вариант рекомендуемых маршрутов движения КТС 4, при которых для всех четырех КТС 41, 42, 43, 44 выполнено условие  движение КТС 41 из начальной 81 в конечную 91 вершину должно осуществляться по рекомендуемому маршруту 26; движение КТС 42 начальной 82 в конечную 92 вершину должно осуществляться по рекомендуемому маршруту 27; движение КТС 43 из начальной 83 в конечную 94 вершину должно осуществляться по рекомендуемому маршруту 28; движение КТС 44 из начальной 84 в конечную 94 вершину должно осуществляться по рекомендуемому маршруту 29.
движение КТС 41 из начальной 81 в конечную 91 вершину должно осуществляться по рекомендуемому маршруту 26; движение КТС 42 начальной 82 в конечную 92 вершину должно осуществляться по рекомендуемому маршруту 27; движение КТС 43 из начальной 83 в конечную 94 вершину должно осуществляться по рекомендуемому маршруту 28; движение КТС 44 из начальной 84 в конечную 94 вершину должно осуществляться по рекомендуемому маршруту 29.
После этого перебор комбинаций маршрутов завершают, а рекомендуемые маршруты r-й комбинации от ЦС 2 передают по каналам радиосвязи 61,62,…, 6K на соответствующие головные ТС 7 k-x КТС 41,42,…, 4K На модельной цифровой карте посредством монитора компьютера головного ТС 7 визуализируют рекомендуемый маршрут движения и текущее положение k-й КТС 4k.
С целью предотвращения возникновения помех при движении КТС 4 по сформированным рекомендуемым маршрутам со стороны ТС 7, перемещающихся вне состава КТС 4, силами службы регулирования движения 3 организуют принудительное регулирование движения. Регулирование заключается в освобождении участков дорог на время проезда по ним КТС 4, движущихся по сформированным рекомендуемым маршрутам, от одиночных ТС 7.
Благодаря новой совокупности перечисленных признаков в заявленном способе во втором варианте реализована возможность формирования рекомендуемых маршрутов движения КТС 4 с учетом их взаимного влияния на условия перемещения и соблюдения условия прибытия всех КТС 4 в установленные сроки.
Реализация способа во втором варианте позволит спланировать своевременное перемещения всех КТС 4 таким образом, что их движение будет осуществляться со скоростью в заданных пределах, без взаимных помех и с учетом ранга приоритета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования рекомендуемых маршрутов следования железнодорожных вагонов | 2020 |
|
RU2745549C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2444794C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОЖНОЙ СЕТИ | 2014 |
|
RU2551294C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ТРАНСПОРТНЫХ СРЕДСТВ ЦЕНТРОМ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ В ВОЗДУШНОМ, НАЗЕМНОМ ПРОСТРАНСТВЕ | 2018 |
|
RU2676519C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2377658C1 |
| СПОСОБ АГРЕГАЦИИ МНОЖЕСТВЕННЫХ ПРОЕЗДОВ ПО МАРШРУТУ ДЛЯ РАСЧЁТА ОПТИМАЛЬНЫХ ПРОФИЛЕЙ СКОРОСТИ ДЛЯ ГОРОДСКОГО РЕЛЬСОВОГО ТРАНСПОРТА | 2023 |
|
RU2798951C1 |
| Система контроля транспортных средств с возможностью осуществления обратной связи | 2015 |
|
RU2633663C2 |
| СПОСОБ СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ О ТРАНСПОРТНЫХ ПОТОКАХ НА АВТОДОРОГАХ С ИСПОЛЬЗОВАНИЕМ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ДАННЫХ | 2010 |
|
RU2442963C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА И УСТРОЙСТВО | 2011 |
|
RU2484533C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2395122C2 |
Изобретения относятся к области автоматизированного управления движением транспортных средств (ТС) и колонн транспортных средств (КТС). Технический результат заключается в обеспечении регулирования маршрутов движения как ТС, так и колонн с ТС, с учетом их рангов приоритета и установленных скоростей движения. В способе используют центральную станцию (ЦС), снабженную средствами радиосвязи, телекоммуникационными средствами и компьютером, формируют модельную цифровую карту и передают ее на компьютеры головных транспортных средств КТС, снабженных средствами радиосвязи и навигации. Компьютер ЦС на основании полученных данных о характеристиках, местонахождении и требуемом месте назначения, формирует рекомендуемые маршруты движения и передает их на головные ТС соответствующих КТС. Дополнительно организуют принудительное регулирование движения других ТС, перемещающихся вне состава КТС. В первом варианте способа реализована возможность последовательного формирования рекомендуемых маршрутов движения ТС в составе КТС, обеспечивающих проезд КТС без взаимных помех и учитывающих как ранг их приоритета, так и установленные для них скорости движения, а во втором варианте обеспечивает возможность формирования рекомендуемых маршрутов с соблюдением требуемого времени прибытия в пункт назначения каждой КТС. 2 н. и 2 з.п. ф-лы, 8 ил.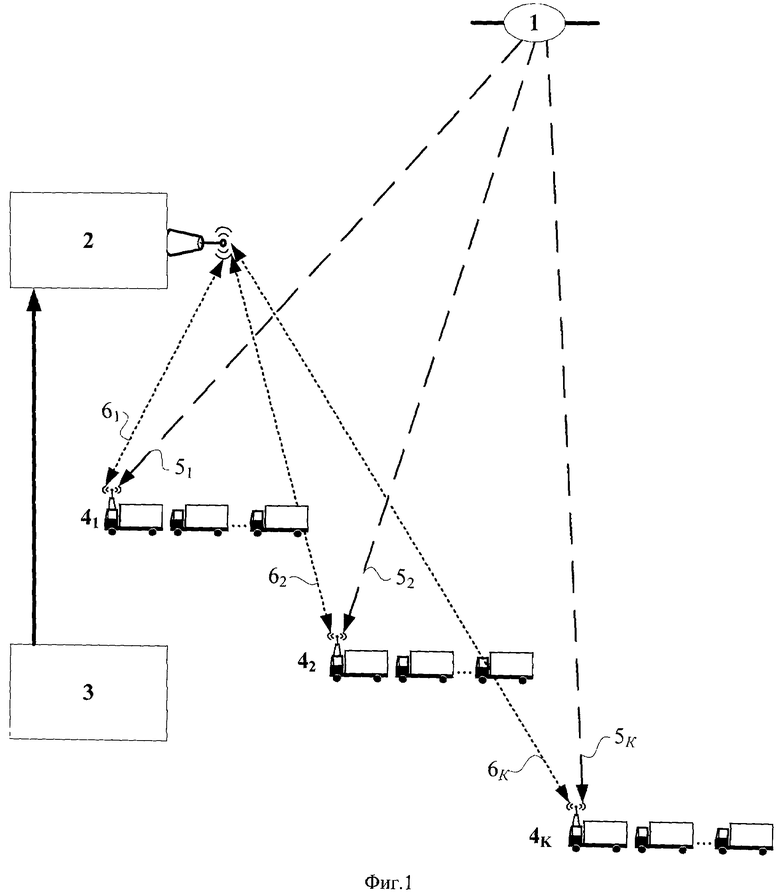
1. Способ формирования рекомендуемых маршрутов движения транспортных средств (ТС), заключающийся в том, что формируют модельную цифровую карту дорожной сети в виде совокупности вершин и ребер графа, представляющих соответственно перекрестки и дороги реальной дорожной сети, модельную цифровую карту вводят в память компьютера центральной станции, снабженной средствами радиосвязи, и передают ее по каналам радиосвязи на ТС, снабженные компьютером, средствами радиосвязи и навигации, с ТС передают по каналам радиосвязи на центральную станцию данные о своих начальной и конечной вершинах на модельной цифровой карте дорожной сети, подлежащих проезду, на основе этих данных в компьютере центральной станции формируют рекомендуемые маршруты движения из начальной вершины в конечную вершину и по каналам радиосвязи передают их на соответствующие ТС, где на модельной цифровой карте посредством монитора визуализируют рекомендуемые маршруты и текущее положение ТС, отличающийся тем, что рекомендуемые маршруты формируют для движения К колонн транспортных средств (КТС), которые предварительно ранжируют в соответствии с рангом их приоритета, далее вводят в память компьютера центральной станции данные о характеристиках КТС, включающие ранг приоритета prk, где k=1, 2,…, К, каждой КТС, ее максимально и минимально  допустимые скорости движения, длину Lk КТС, определяемую количеством Nk и длиной отдельных ТС, составляющих k-ю КТС, и предполагаемой дистанцией dk между ними, затем от каждой КТС на центральную станцию передают данные о запланированном времени прибытия в конечную вершину и времени начала движения k-й КТС из начальной вершины, далее для КТС, имеющей наивысший ранг приоритета prmax, формируют рекомендуемый маршрут, рассчитывают время занятости каждой вершины графа дорожной сети проезжающей по ним КТС с наивысшим рангом приоритета prmax и запоминают это время в памяти компьютера центральной станции, после чего последовательно в соответствии с рангом приоритета КТС для k-й КТС формируют рекомендуемый маршрут и передают его по каналам радиосвязи от компьютера центральной станции для визуализации на компьютер головного ТС k-й КТС, причем дополнительно организуют принудительное регулирование движения других ТС, перемещающихся вне состава КТС, предотвращающее возникновение помех и «пробок» на сформированных рекомендуемых маршрутах для колонн транспортных средств.
допустимые скорости движения, длину Lk КТС, определяемую количеством Nk и длиной отдельных ТС, составляющих k-ю КТС, и предполагаемой дистанцией dk между ними, затем от каждой КТС на центральную станцию передают данные о запланированном времени прибытия в конечную вершину и времени начала движения k-й КТС из начальной вершины, далее для КТС, имеющей наивысший ранг приоритета prmax, формируют рекомендуемый маршрут, рассчитывают время занятости каждой вершины графа дорожной сети проезжающей по ним КТС с наивысшим рангом приоритета prmax и запоминают это время в памяти компьютера центральной станции, после чего последовательно в соответствии с рангом приоритета КТС для k-й КТС формируют рекомендуемый маршрут и передают его по каналам радиосвязи от компьютера центральной станции для визуализации на компьютер головного ТС k-й КТС, причем дополнительно организуют принудительное регулирование движения других ТС, перемещающихся вне состава КТС, предотвращающее возникновение помех и «пробок» на сформированных рекомендуемых маршрутах для колонн транспортных средств.
2. Способ по п.1, отличающийся тем, что рекомендуемый маршрут k-й КТС формируют с учетом ранее установленных для нее значений минимальной и максимальной скоростей и занятости вершин графа дорожной сети проезжающими по ним КТС с более высокими рангами приоритета.
3. Способ формирования рекомендуемых маршрутов движения транспортных средств (ТС), заключающийся в том, что формируют модельную цифровую карту дорожной сети в виде совокупности вершин и ребер графа, представляющих соответственно перекрестки и дороги реальной дорожной сети, модельную цифровую карту вводят в память компьютера центральной станции, снабженной средствами радиосвязи, и передают ее по каналам радиосвязи на ТС, снабженные компьютером, средствами радиосвязи и навигации, с ТС передают по каналам радиосвязи на центральную станцию данные о своих начальной и конечной вершинах на модельной цифровой карте дорожной сети, подлежащих проезду, на основе этих данных в компьютере центральной станции формируют рекомендуемые маршруты движения из начальной вершины в конечную вершину и по каналам радиосвязи передают их на соответствующие ТС, где на модельной цифровой карте посредством монитора визуализируют рекомендуемые маршруты и текущее положение ТС, отличающийся тем, что рекомендуемые маршруты формируют для движения К колонн транспортных средств (КТС), которые предварительно ранжируют в соответствии с рангом их приоритета, далее вводят в память компьютера центральной станции данные о характеристиках КТС, включающие ранг приоритета prk, где k=1, 2,…, К, каждой КТС, ее максимально и минимально допустимые скорости движения, длину Lk КТС, определяемую количеством Nk и длиной отдельных ТС, составляющих k-ю КТС, и предполагаемой дистанцией dk между ними, затем от каждой КТС на центральную станцию передают данные о запланированном времени прибытия в конечную вершину и времени начала движения k-й КТС из начальной вершины, после чего для каждой k-й КТС формируют по Q≥2 наименее протяженных предварительных маршрутов протяженностью , где q=1, 2,…, Q, из которых один кратчайший , далее выполняют перебор возможных комбинаций маршрутов R=QK, в каждой комбинации маршрутов вычисляют время прибытия  k-й КТС в свою конечную вершину и сравнивают
k-й КТС в свою конечную вершину и сравнивают  с запланированным , при число Q предварительных маршрутов последовательно увеличивают на единицу до тех пор, пока будет выполнено условие для каждой k-й КТС в r-й комбинации маршрутов, где r=1, 2,…, R, после чего перебор комбинаций маршрутов завершают, а рекомендуемые маршруты r-й комбинации передают по каналам радиосвязи для визуализации на компьютере головного ТС k-й КТС, причем дополнительно организуют принудительное регулирование движения других ТС, перемещающихся вне состава КТС, предотвращающее возникновение помех и «пробок» на сформированных рекомендуемых маршрутах для колонн транспортных средств.
с запланированным , при число Q предварительных маршрутов последовательно увеличивают на единицу до тех пор, пока будет выполнено условие для каждой k-й КТС в r-й комбинации маршрутов, где r=1, 2,…, R, после чего перебор комбинаций маршрутов завершают, а рекомендуемые маршруты r-й комбинации передают по каналам радиосвязи для визуализации на компьютере головного ТС k-й КТС, причем дополнительно организуют принудительное регулирование движения других ТС, перемещающихся вне состава КТС, предотвращающее возникновение помех и «пробок» на сформированных рекомендуемых маршрутах для колонн транспортных средств.
4. Способ по п.3, отличающийся тем, что в r-й комбинации маршрутов время прибытия в свою конечную вершину  первоначально вычисляют для КТС, имеющей наивысший ранг приоритета prmax, затем время занятости каждой вершины графа дорожной сети проезжающей по ним КТС с prmax запоминают в памяти компьютера центральной станции, после чего последовательно в соответствии с рангом приоритета КТС и с учетом ранее установленных для каждой КТС значений минимальной
первоначально вычисляют для КТС, имеющей наивысший ранг приоритета prmax, затем время занятости каждой вершины графа дорожной сети проезжающей по ним КТС с prmax запоминают в памяти компьютера центральной станции, после чего последовательно в соответствии с рангом приоритета КТС и с учетом ранее установленных для каждой КТС значений минимальной  и максимальной скоростей, а также занятости вершин графа дорожной сети проезжающими по ним КТС с более высокими рангами приоритета вычисляют время прибытия в свои конечные вершины остальных КТС, движущихся по маршрутам, определенных r-й комбинацией маршрутов.
и максимальной скоростей, а также занятости вершин графа дорожной сети проезжающими по ним КТС с более высокими рангами приоритета вычисляют время прибытия в свои конечные вершины остальных КТС, движущихся по маршрутам, определенных r-й комбинацией маршрутов.
| Устройство для определения места замыкания на корпус обмотки возбуждения синхронной машины | 1984 |
|
SU1274059A1 |
| ЕР 0772174 А1, 07.05.1997 | |||
| ЕР 2000770 А1, 10 12.2008 | |||
| Устройство для обрезки сучьев с поваленных деревьев | 1981 |
|
SU1030167A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИМАЛЬНОГО МАРШРУТА ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В УСЛОВИЯХ НАСЕЛЕННОГО ПУНКТА | 1999 |
|
RU2153194C1 |

