Описание изобретения
Область техники.
Изобретение относится к области автоматизированного контроля и управления движением беспилотных летательных аппаратов и беспилотных транспортных средств (БЛА-ТС) в нижнем сегменте воздушного, наземном и надводном пространстве.
Уровень техники.
Возрастающая интенсивность движения беспилотных транспортных средств, в первую очередь БЛА, и рост опасности инцидентов использования дронов требуют создания системы регулирования воздушного движения беспилотной транспортной техники.
Массовое производство автомобилей с функцией летающего аппарата еще более усложняет воздушное и наземное движение и требует новых форм организации воздушной и наземной координации эксплуатации транспортных средств, основывающейся на централизации планирования и контроля общего регулирования транспортных потоков, использования разрешительной системы воздушного и наземного движения БЛА-ТС.
В настоящее время БЛА-ТС не находятся под системой контроля использования воздушного и наземного пространства. Органы внутренних дел (МВД), Единая система организации воздушного движения (ЕС ОрВД), другие структуры не осуществляют контроль движения БЛА-ТС, технические возможности их обнаружения на современном этапе ограничены.
Индикация и отображение БЛА для контроля уполномоченными органами использования воздушного пространства (ИВП) и ОрВД на современном этапе могут осуществляться несколькими способами, основывающимися на трансляции БЛА своих координат, установленных с использованием сигналов глобальной навигационной спутниковой системы (ГНСС) ГЛОНАСС/GPS/других систем спутниковой навигации. Сигналы могут транслироваться БЛА с использованием системы авиационной связи вторичной радиолокации и ADS-B (АЗН-В), описан ICAO документом Cir326/AN188, также передачей потоковых сигналов бортовыми транспондерами через мобильные GSM/GPRS сети связи (патент RU 2609625), с использованием комбинированных способов.
Индикация обеспечивает односторонность решения задачи контроля за ИВП и ОрВД, отражая динамику движения и нарушения эксплуатантом БЛА-ТС правил полетов, например, не соблюдение запрета ИВП, введенного в отдельном сегменте. Воздействовать или предупредить эксплуатанта беспилотника об ограничениях ИВП орган ОрВД не может, т.к. технически канала для прямой связи, как и отображающей индикации, в настоящее время не предусмотрено.
Таким образом, для обеспечения организации воздушного и наземного движения беспилотных аппаратов и транспортных средств существует потребность в обеспечении электротехнической связи между структурами, регулирующими движение транспортных средств, и эксплуатантами (владельцами) беспилотников для контроля, предупреждения и исключения несанкционированных действий. Осуществление полноценного ОрВД для беспилотных аппаратов создаст надежные условия их ускоренной интеграции в единое с пилотируемой авиацией воздушное пространство и расширения их использования.
Учитывая малочисленность предложений по системам общей координации движения беспилотных транспортных средств, тем более, пока еще не введенных в эксплуатацию гибридных летающих беспилотных автомобилей, автором были рассмотрены наиболее близкие к тематике патенты и публикации с отдельными решениями вопросов моделирования маршрутов и организации потоков беспилотных и пилотируемых транспортных средств.
Известен «Способ дистанционного управления полетом беспилотного летательного аппарата и беспилотная авиационная система» (патент RU 2523613, G08G 5/00 (2006.01), опубликован 20.07.2014), в котором управление полетом БЛА производится в автономном режиме по запрограммированному маршруту, также предусмотрены передача команд с пункта управления. БЛА имеет возможность автономного управления посадкой с учетом этих данных и передачей полетной информации с борта на пункт управления. Существенным недостатком способа является то, что управление осуществляется оператором, передача данных производится по радиоканалу в зоне прямой радиовидимости, что снижает дальность использования БЛА, прямые радиоканалы для передачи команд являются менее помехозащищенными.
Известен «Способ управления беспилотным летательным аппаратом» (патент RU 2562890, 2014, B64C 39/00 (2006.01), опубликован 10.09.2015), при котором управление БПЛА, оборудованного бортовой автоматической системой управления, также осуществляют с наземного пульта, используя спутниковый канал связи для приема и передачи координат движения. Способ для малогабаритных БЛА является затратным, требующим дорогостоящей и энергоемкой спутниковой аппаратуры связи, дорогой линии связи, что делает беспилотник мало эффективным. К недостаткам также относятся отсутствие системы маршрутизации, участие человека, невозможность управления совокупностью беспилотников.
Известен «Способ определения оптимального маршрута движения транспортного средства» (Патент RU 2377658, 2008, МПК G08G 1/0969, опубликован 27.12.2009), заключающийся в том, что компьютер центральной станции (ЦС) формирует модельную электронную скоростную карту дорожной сети населенного пункта, также ЦС по радиоканалам получает от ТС, оборудованных навигационными приборами, данные о своем местонахождении и скорости, на основании чего компьютер ЦС определяет возникновение на дорожной сети «пробок», вычисляет оптимальный маршрут и передает его на компьютеры ТС абонентов для использования водителем. Данный способ относится только к автомобильным ТС, управляемым водителями, беспилотные ТС не рассматриваются. К недостаткам следует отнести низкую справочно-статистическую базу, основывающуюся только на скорости движения ТС, что не дает эффективного отражения трафика движения.
Известен «Способ формирования рекомендуемых маршрутов движения транспортных средств» (патента RU 2459259, 2012, МПК G06Q, опубликован 20.08.2012), в котором авторами предлагается использовать центральную станцию (ЦС), снабженную средствами радиосвязи, телекоммуникационными средствами и компьютером, формирующую модельную цифровую карту и передающую ее на компьютеры головных транспортных средств колонн (КТС). Далее компьютер ЦС формирует рекомендуемые маршруты и также передает их на головные ТС колонн, при этом предполагается, что другие ТС будут регулироваться службой, обеспечивающей приоритет КТС. Данный способ не предполагает наличие беспилотных ТС, бортовой навигационной аппаратуры для ориентирования. Недостатками данной системы являются отсутствие оценки местоположения ТС и контроля со стороны ЦС за исполнением маршрута колонной, обязательное принудительное регулирование специальной службой движения ТС, снижающее эффективность общего дорожного движения.
Наиболее близкими по своей технической сущности к заявленным являются системы планирования воздушных потоков и моделирования ОрВД, используемые ЕС ОрВД Российской Федерации ([Электронный ресурс]. - URL: https://www.gkovd.ru/, дата обращения 05.01.2018). Техническое решение систем разработано и внедрено Государственным научно-исследовательским институтом авиационных систем (ГосНИИ АС) на основе «Автоматизированной системы планирования воздушного движения (АС ПВД)» и «Комплекса имитационного моделирования ОрВД» ([Электронный ресурс]. - URL: http://atm.gosniias.ru/ru/instruments.html, дата обращения 07.10.2016). Однако, данные системы предназначены для моделирования и планирования потоков пилотируемых магистральных самолетов в ВП классов А, С, в контуре планирования и управления обязательно наличие диспетчерского персонала, действующие системы и комплексы технически не могут реализовать управление БЛА-ТС на основе контроля соответствия динамических координат движения беспилотников заданным планом полета. Раскрытие изобретения.
Современные БЛА-ТС имеют дистанционные системы управления, подразделяемые на управление оператором, управление пилотажно-навигационным комплексом (автопилотом с программой автоматического пилотирования) или использующие комбинированный метод управления.
Во всех методах предполагается наличие оператора или оператора-программиста, осуществляющего прямой или отложенный запрограммированный способ управления БЛА-ТС. Учитывая существенный разрыв между ежегодным ростом количества БЛА-ТС в мире и количеством подготовленных операторов, также отсутствие стандартов, правил и систем технического контроля за использованием беспилотников, предлагается максимально автоматизировать процесс управления беспилотными средствами, минимизировать человеческий фактор в процессах одновременного управления большим количеством БЛА-ТС.
Результат достигается следующей технологией:
- вводится единая региональная система планирования и моделирования маршрутизации и контроля движения БЛА-ТС, осуществляемая региональным Центром контроля и управления движением (ЦКУД);
- по формализованной заявке эксплуатанта БЛА-ТС региональным ЦКУД планируется и моделируется в пространстве и во времени (график) 4-D маршрут движения БЛА-ТС;
- ЦКУД осуществляет передачу формализованного плана и расчетной 4-D модели маршрута на борт в систему пилотажно-навигационного комплекса (автопилота) БЛА-ТС;
- под управлением автопилота, включающего аппаратуру и программное обеспечение элементов искусственного видения и интеллекта, по программе и расчетной модели, полученного от ЦКУД плана 4-D маршрута, производится движение БЛА-ТС;
- в ЦКУД с борта БЛА передаются потоковой трансляцией динамические координаты движения беспилотника, установленные по сигналам ГНСС (ГЛОНАСС/GPS/др.системам), по которым ЦКУД автоматически отслеживает соответствие движения БЛА маршруту и графику, установленным планом движения;
- в случае отклонения БЛА-ТС от 4-D маршрута, траектории и графика, установленных планом, из ЦКУД по защищенному каналу автоматически направляются в автопилот БЛА-ТС формализованные сигналы корректировки параметров движения, такие как ускорение, торможение, другие команды автопилоту, с целью обеспечения соответствия координат движения, заданных планом;
- при значительном отклонении от плана движения, непредвиденных обстоятельствах или по команде эксплуатанта ЦКУД осуществляет остановку/посадку БЛА-ТС с последующим моделированием и планированием нового маршрута с учетом остатка топлива/зарядки на борту для силовой установки.
Таким образом, система автоматизированного управления БЛА-ТС позволяет организовать движения беспилотных и пилотируемых транспортных средств в едином пространстве, в дальнейшем поэтапно перейти полностью на автоматическую систему управления потоками транспортных средств с обеспечением безопасного движения, исключающего конфликты и инциденты в процессе перемещения. Для этого также необходимо введение системы нормативно-правового обеспечения, новых технических стандартов и нормативов для БЛА-ТС, новой структуры ВП G-класса, системы правил и ограничений движения на отдельных участках пространства и транспортной инфраструктуры и другие виды регулирования.
Основными элементами системы являются:
- Главный и региональные центры контроля и управлением движения (ЦКУД) БЛА-ТС, включающие систему автоматизированного моделирования маршрутов, контроля и управления движением, созданные и имеющие функции, подобные структурам системы ЕС ОрВД, планирующим потоки магистральных самолетов в ВП классов А, С;
программно-аппаратное обеспечение ЦКУД, обладающее достаточными вычислительными мощностями, для планирования и 4-D моделирования маршрутов БЛА-ТС, включающие программные средства расчета пропускной способности (ПС), анализа использования ВП, организации потоков воздушного движения;
- нормативно-правовое обеспечение, включающее законодательную базу, юридические и технические регламенты, определяющие требования к технике и технологиям организации движения БЛА-ТС, структуру и инфраструктуру воздушного и наземного пространства;
- базы данных, размещенные на серверах приложений и включающие данные регистрации БЛА-ТС, структуры ВП, 3D картографирования, цифровое отображение территориальной и пространственной инфраструктуры, сборники аэронавигационной, технической, метео информации для БЛА-ТС, установленные ограничения, запреты на ИВП, статистические, архивные данные полетов, другие данные;
- летательные, наземные, надводные и гибридные беспилотные аппараты и транспортные средства (БЛА-ТС), управляемые пилотажно-навигационным комплексом (автопилотом);
- бортовая аппаратура автопилота (пилотажно-навигационного комплекса) БЛА-ТС с элементами искусственного видения и интеллекта, совмещенная с транспондером (приемопередатчиком ГЛОНАСС/GPS-сигналов), ретранслирующая динамические координаты и другие данные через GSM/GPRS сети на телематические серверы ЦУД, также дополненная защищенным каналом приема управляющих сигналов от регулирующих органов (ЦКУД);
- сеть службы приема заявок на управление ЦКУД БЛА-ТС, обеспечивающая начальную обработку формализованных заявленных планов полетов в ВП класса C/G;
- глобальные навигационные спутниковые системы (ГНСС) с передачей сигналов ГЛОНАСС или в сочетании ГЛОНАСС/GPS/др. систем и другие;
- сеть мобильной GSM/GPRS связи с распределенными базовыми станциями, специальной аппаратурой приема и ретрансляции сигналов мобильной радиосвязи в регионе.
Краткое описание чертежей.
Описание представлено со ссылками на графические изображения, на которых:
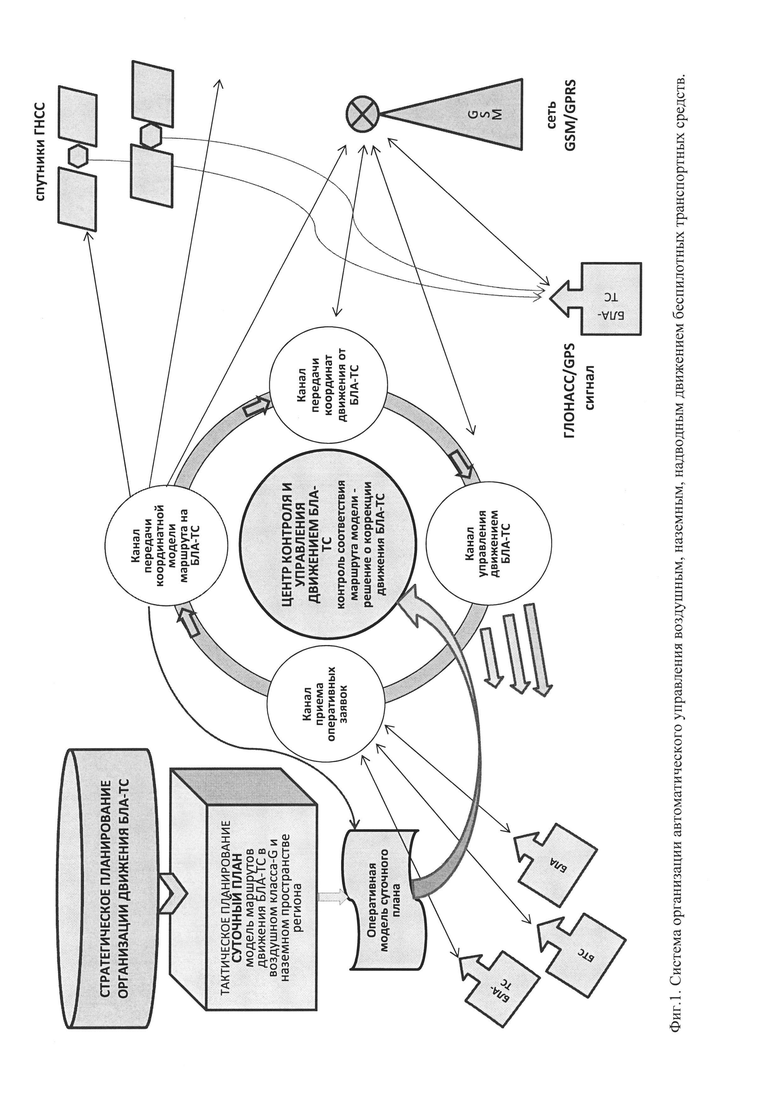
фиг. 1 - схематичный вид технологической последовательности действий, иллюстрирующий систему организации автоматического управления воздушным, наземным, надводным движением беспилотных транспортных средств на основе автоматизированного планирования, моделирования и контроля маршрутов;
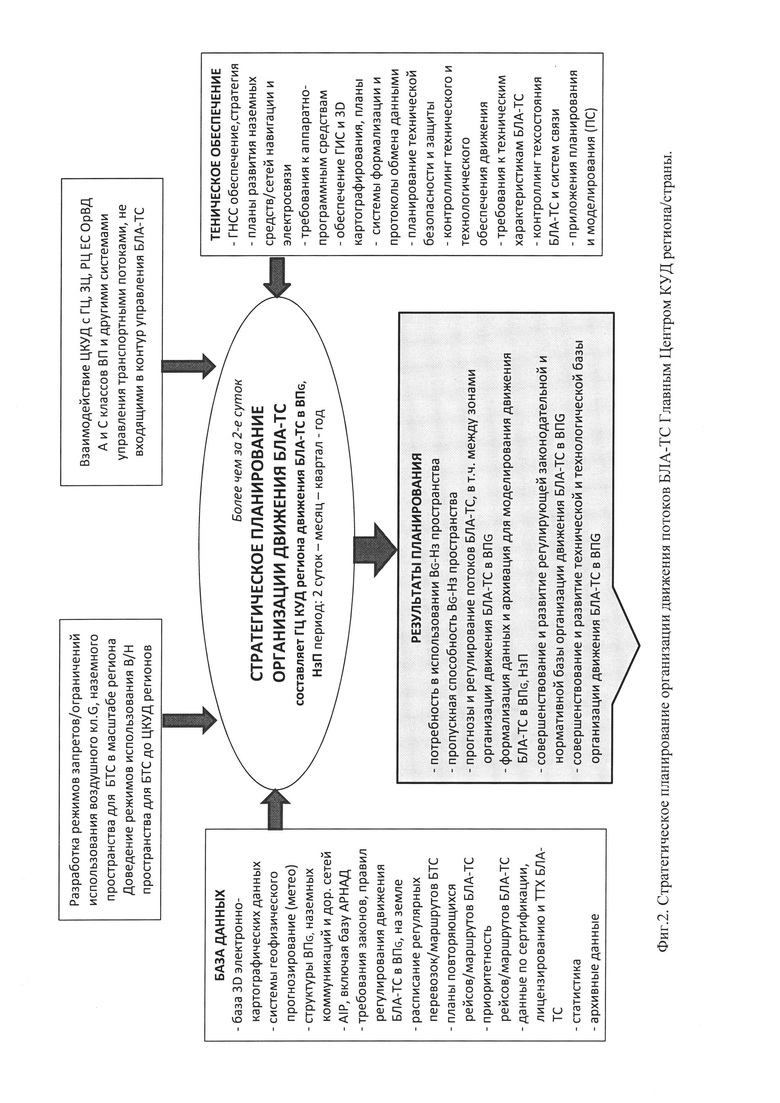
фиг. 2 - логическая блок-схема стратегического планирования организации движения потоков БПЛА Главным Центром КУД региона;
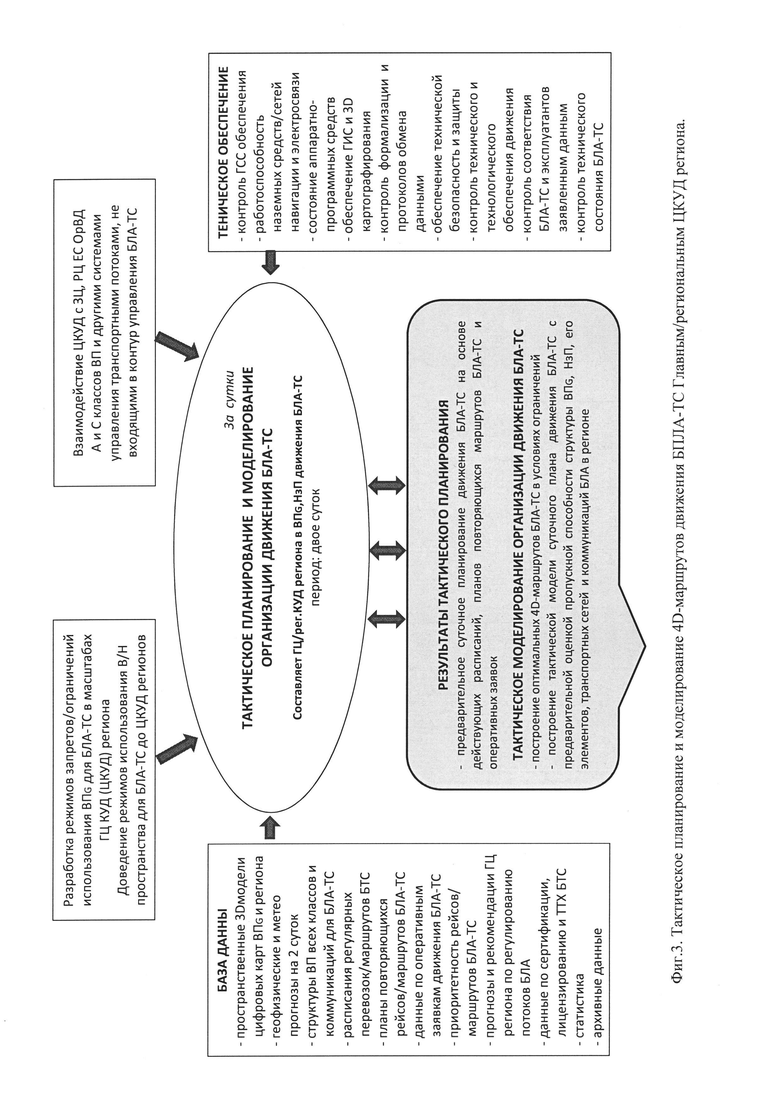
фиг. 3 - логическая блок-схема тактического планирования и моделирования 4D-маршрутов движения БЛА Главным/региональным Центром КУД региона;
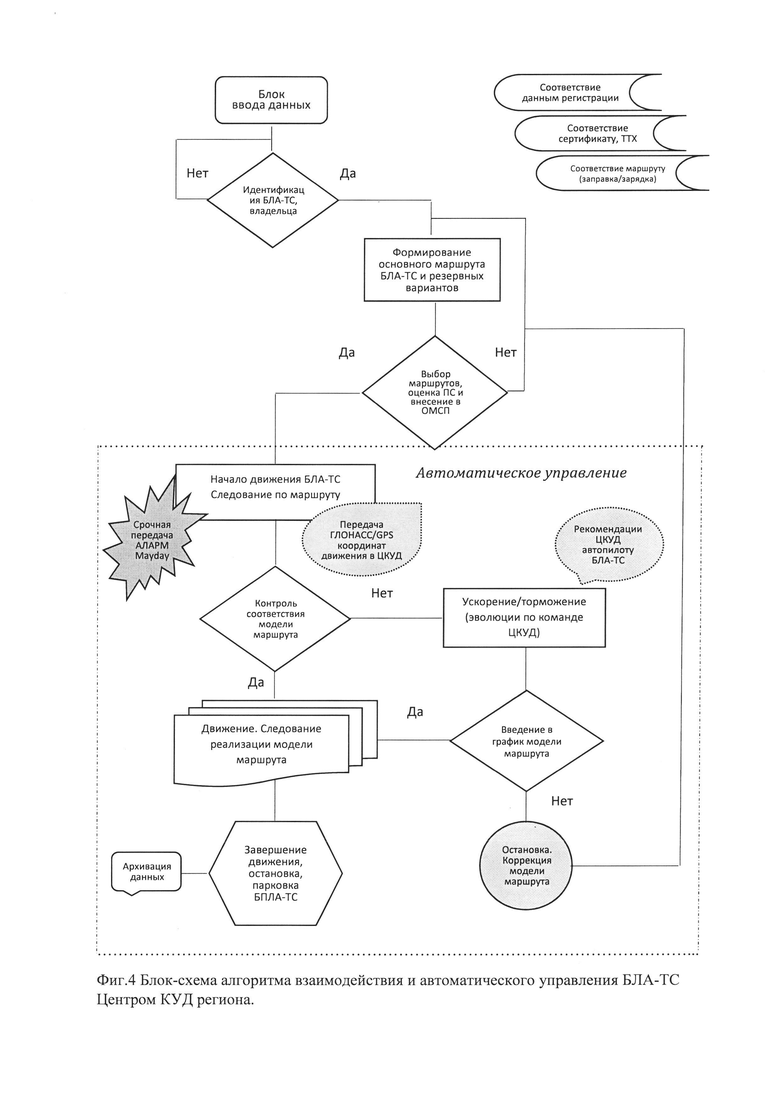
фиг. 4 - блок-схема алгоритма взаимодействия и автоматического управления БПЛА Центром КУД региона;
фиг. 5 - иллюстрация маршрута полета БЛА с обходом запретных зон над городскими сооружениями (собором, башней, стадионом).
Подробное описание осуществления изобретения.
Показанный на фиг. 1 схематичный вид технологической последовательности действий иллюстрирует систему организации автоматического управления воздушным, наземным, надводным движением беспилотных транспортных средств. Основой системы организации являются Главный и региональные Центры контроля и управлением движения (ЦКУД) БЛА-ТС, которые после получения формализованной заявки эксплуатанта автоматически моделируют воздушную обстановку на период выполнения полета/движения беспилотника, оценивают пропускную способность сети, моделируют маршрут с использованием цифровой картографии. Центры ведут контроль и организацию управления движением потоков беспилотных аппаратов, аналогично структурам системы ОрВД, планирующим потоки магистральных пилотируемых самолетов в ВП классов А, С.
Система автоматизированного моделирования маршрутов, контроля и управления движением БПЛА-ТС базируется на планировании потоков и 4-D моделирования маршрутов беспилотников, которые обеспечиваются программно-аппаратным комплексом ЦКУД, включающим программные средства расчета пропускной способности (ПС), анализа и планирования ИВП, планирования организации потоков воздушного движения. Для гармонизации данных и соблюдения временных интервалов баз данных, включая расписание, повторяющиеся полеты и маршруты, планирование производится в три этапа:
- стратегическое планирование с началом разработки от нескольких месяцев до года;
- тактическое планирование с составлением суточного плана полетов за 2-е суток до календарной даты искомых суток;
- оперативное планирование и моделирование маршрутов БЛА-ТС на сутки на основе тактического суточного плана движения и оперативных заявок, поступающих от эксплуатантов в режиме реального времени.
На фиг. 2 отображены основные составляющие стратегического планирования организации движения потоков БЛА-ТС Главным ЦКУД региона. Стратегическое планирование осуществляется на основе обширной базы данных цифровых 3-D карт поверхности земли и профилей классифицированного воздушного пространства, нормативных документов, предписаний и требований, действующих расписаний, планов повторяющихся полетов и других данных, включая данные принадлежности, сертификации и лицензирования эксплуатации БЛА-ТС. Главным и региональными ЦКУД должны вестись и контролироваться системы запретов и ограничений на использование сегментов и частей ВП, наземных и надводных территорий, проводиться согласования вопросов движения беспилотных средств со смежными центрами.
Предполагается, что обеспечение автоматизации осуществляется на основе надежности и современности оборудования, технических и программных средств. В системе стратегического планирования должна быть отражена стратегия развития технического и технологического обеспечения управления беспилотниками. Данное обеспечение представлено на фиг. 2 блоком «Техническое обеспечение».
Результатом стратегического планирования должны стать анализ потребностей будущих периодов в использовании воздушного и наземного пространства, оценка пропускной способности сегментов и элементов пространства, прогнозы по регулированию потоков БЛА-ТС.
На фиг. 3 представлен порядок формирования Главным и/или зональным/региональным ЦКУД тактического суточного плана движения БЛА-ТС за сутки до его календарного наступления. Структура блоков формирования тактического суточного плана аналогична стратегическим. Используются базы новейших данных по формированию плана движения.
На фиг. 4 представлена блок-схема алгоритма взаимодействия и автоматического управления БЛА-ТС Центром КУД региона. На этапе направления заявки от эксплуатанта БЛА-ТС на обслуживание и управление в ЦКУД региона, заявка, формализованная по действующему протоколу, попадает в сеть службы приема заявок на управление БЛА-ТС, производящей начальную обработку заявленных планов полетов в ВП класса G и/или маршрутов движения по наземному (надводному) пространству. После идентификации БЛА-ТС и эксплуатанта, проведения оценки технического состояния и степени удовлетворения требованиям по необходимому уровню заправки/зарядки топлива/энергии для бортовой силовой установки заявленному маршрута, заявка передается в ЦКУД региона.
Центр КУД автоматически моделирует маршрут и интегрирует данные маршрута в модель суточного плана движения, одновременно оценивая пропускную способность пространства.
Объектом изобретения является выделение в отдельную операцию на этапе разработки суточного плана ресурса моделирования 4-D маршрутов с одновременной оценкой пропускной способности сегментов воздушного и наземного пространства, через которые моделируется данный маршрут.
По результатам интеграции модели в план автоматически назначается время отправления и начинается движение БЛА-ТС, которое может быть прервано специальной командой ЦКУД или эксплуатантом. Одновременно с началом движения транспондер БЛА-ТС, устанавливая свое местоположение по сигналам ГНСС (ГЛОНАСС/GPS/др.систем), начинает трансляцию собственных сигналов с динамически меняющимися координатами через сеть мобильной GSM/GPRS связи или другую сеть, например, через сеть сертифицированных наземных приемников ADS-B (АЗН-В), на телематические серверы ЦКУД.
Центр КУД, получая сигналы с текущими координатами от транспондера БПЛА-ТС автоматически сравнивает их с установленными координатами модели маршрута в суточном плане. При обнаружении допустимых расхождений между динамическими координатами и данными 4-D маршрута, включая временной фактор установленного графика движения, ЦКУД автоматически направляет по защищенному каналу GSM/GPRS сети связи или другой сети автопилоту БЛА-ТС сигналы, корректирующие ход движения. При значительном отклонении от плана движения/модели маршрута, непредвиденных обстоятельствах или по команде эксплуатанта ЦКУД осуществляет остановку/посадку БЛА-ТС с последующим моделированием и планированием нового маршрута с учетом остатка топлива/зарядки на борту для силовой установки.
Объектом изобретения является принцип автоматического контроля и корректировки движения БЛА-ТС Центром КУД путем сравнения фактических динамических координат движения беспилотника с установленными координатами и графиком его плана движения и модели маршрута, с последующей корректировкой параметров движения при расхождении координат и/или графика движения.
На фиг. 5 изображена иллюстрация маршрута полета БЛА с обходом запретных зон над городскими сооружениями (собором, башней, стадионом). Система моделирования 4-D маршрутов, расчета пропускной способности сегментов воздушного и наземного пространства должны учитывать запреты и ограничения на использование пространства.
Формула изобретения.
1. Система автоматического управления движением беспилотных летательных аппаратов - транспортных средств (БЛА-ТС) региональным Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств по заявке эксплуатанта БЛА-ТС, на основе модели маршрута, рассчитанной ЦКУД, включенной в суточный план движения и направленной ЦКУД в виде формализованного плана движения автопилоту БПЛА-ТС, и выполняемого автопилотом движения БЛА-ТС с передачей динамических координат, установленных по сигналам ГНСС (ГЛОНАСС/GPS/др.систем), транспондером беспилотника в ЦКУД, под контролем ЦКУД, осуществляющим постоянное сравнение динамических координат БЛА-ТС с координатами плана движения и модели маршрута, и управлением автопилотом БЛА-ТС командами корректировки параметров движения и маршрута, поступающими из ЦКУД сигналами по защищенному каналу связи, до остановки БЛА-ТС.
2. Система автоматического управления движением беспилотных летательных аппаратов - транспортных средств (БЛА-ТС) региональным Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств по п. 1, отличающаяся тем, что передачей динамических координат, установленных по сигналам ГНСС (ГЛОНАСС/GPS/ др.систем), транспондером беспилотника в ЦКУД по каналам сети мобильной GSM/GPRS связи.
3. Система автоматического управления движением беспилотных летательных аппаратов - транспортных средств (БЛА-ТС) региональным Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств по п. 1, отличающаяся тем, что передачей динамических координат, установленных по сигналам ГНСС (ГЛОНАСС/GPS/ др.систем) транспондером беспилотника в ЦКУД по каналам сети авиационной связи, используемой в системах вторичной радиолокации и ADS-B (АЗН-В).
4. Система автоматического управления движением беспилотных летательных аппаратов - транспортных средств (БЛА-ТС) региональным Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств по п. 1, отличающаяся тем, что передачей динамических координат, установленных по сигналам ГНСС (ГЛОНАСС/GPS/ др.систем) комбинированным транспондером беспилотника в ЦКУД по каналам сетей мобильной GSM/GPRS связи, авиационной связи системы ADS-B (АЗН-В), комбинированные сети электротехнической связи.
5. Система автоматического управления движением беспилотных летательных аппаратов - транспортных средств (БЛА-ТС) региональным Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств по п. 1, отличающаяся тем, что управлением автопилотом БЛА-ТС командами корректировки параметров движения и маршрута, поступающими из ЦКУД сигналами по защищенным каналам сетей мобильной GSM/GPRS связи и/или авиационной связи системы ADS-B (АЗН-В).
6. Система автоматического управления движением беспилотных летательных аппаратов - транспортных средств (БЛА-ТС) региональным Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств по п. 1, отличающаяся тем, что модель маршрута БПЛА-ТС, рассчитанная ЦКУД, включенная в суточный план движения и направленная ЦКУД в виде формализованного плана движения автопилоту БПЛА-ТС, может отражать комбинированный 4-D маршрут, включающий движение беспилотника(ов) по наземной, надводной поверхности, движение в воздухе.
7. Система автоматического управления движением беспилотных летательных аппаратов - транспортных средств (БЛА-ТС) региональным Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств по п. 1, отличающаяся тем, что модель 4-D маршрута БЛА-ТС, рассчитанная ЦКУД с учетом требуемой пропускной способности сегментов воздушного, наземного пространства, и включенная ЦКУД в суточный план движения, который является уточненным результатом стратегического и оперативного планирования.
8. Система автоматического управления движением беспилотных летательных аппаратов - транспортных средств (БЛА-ТС) региональным Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств по п. 1, отличающаяся тем, что Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств, взаимодействующим и подчиняющимся Главному/Зональному/региональному ЦКУД района/страны.
9. Система автоматического управления движением беспилотных летательных аппаратов - транспортных средств (БЛА-ТС) региональным Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств по п. 1, отличающаяся тем, что на основе модели 4-D маршрута БЛА-ТС, рассчитанной ЦКУД, включенной в суточный план движения, который составлен с учетом приоритетности и категорированности маршрутов для экстренных служб и других видов ТС, имеющих литерные преимущества.
10. Система автоматического управления движением беспилотных летательных аппаратов - транспортных средств (БЛА-ТС) региональным Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств по п. 1, отличающаяся тем, что по заявке эксплуатанта БЛА-ТС, на основе модели маршрута, рассчитанной ЦКУД для движения БЛА-ТС по воздушному и наземному пространству, включающему транспортные коммуникации и транспортную инфраструктуру всех видов транспорта.
Изобретение относится к способу автоматического управления движением беспилотных летательных аппаратов – транспортных средств (БЛА – ТС) региональным Центром контроля и управления движением (ЦКУД). Для осуществления способа по заявке эксплуатанта БЛА-ТС рассчитывают модель маршрута БЛА-ТС, включают его в суточный план движения и направляют в виде формализованного плана движения автопилоту БЛА – ТС для осуществления движения по маршруту. При движении по маршруту определяют динамические координаты по сигналам ГНСС и передают их с помощью транспондера БЛА-ТС в ЦКУД, где сравнивают их с координатами плана движения и моделью маршрута. В случае несовпадения координат передают команды автопилоту БЛА-ТС по защищенному каналу связи для корректировки параметров движения и маршрута на всем цикле движения до остановки БЛА-ТС. Обеспечивается автоматизация процесса управления БЛА-ТС, минимизация человеческого фактора в процессе управления большим количеством БЛА-ТС. 8 з.п. ф-лы, 5 ил.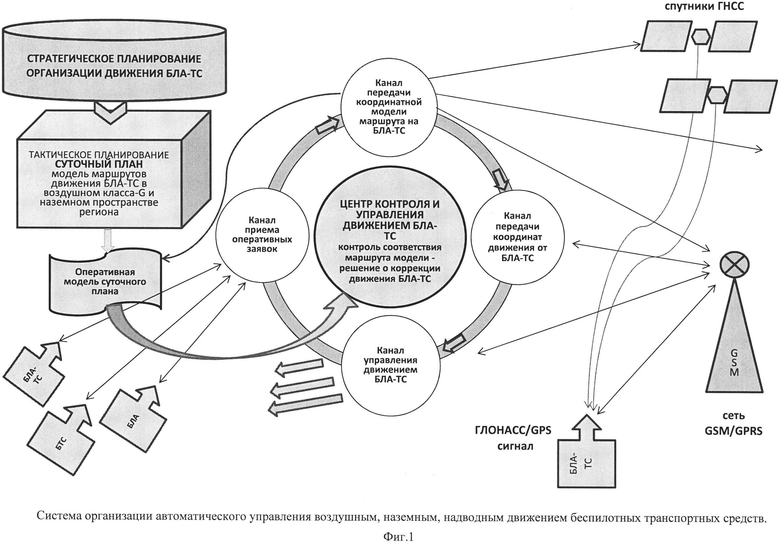
1. Способ автоматического управления движением беспилотных летательных аппаратов - транспортных средств (БЛА-ТС) региональным Центром контроля и управления движением (ЦКУД) беспилотных транспортных средств, заключающийся в том, что в ЦКУД по заявке эксплуатанта БЛА-ТС рассчитывают модель маршрута БЛА-ТС, включают его в суточный план движения и направляют в виде формализованного плана движения автопилоту БЛА-ТС, с помощью которого осуществляется движение по маршруту, при движении по маршруту определяют динамические координаты по сигналам ГНСС и передают их с помощью транспондера БЛА-ТС в ЦКУД, в котором осуществляется сравнение полученных динамических координат с координатами плана движения и моделью маршрута, в случае несовпадения координат от ЦКУД передают команды автопилоту БЛА-ТС по защищенному каналу связи для корректировки параметров движения и маршрута на всем цикле движения до остановки БЛА-ТС.
2. Способ по п. 1, отличающийся тем, что передача динамических координат, определенных по сигналам ГНСС, от БЛА в ЦКУД осуществляется с помощью транспондера по каналам сети мобильной GSM/GPRS связи.
3. Способ по п.1, отличающийся тем, что передача динамических координат, определенных по сигналам ГНСС, от БЛА в ЦКУД осуществляется с помощью транспондера по каналам сети авиационной связи, используемой в системах вторичной радиолокации и ADS-B (АЗН-В).
4. Способ по п. 1, отличающийся тем, что передача динамических координат, определенных по сигналам ГНСС, от БЛА в ЦКУД осуществляется комбинированным транспондером БЛА по каналам сетей мобильной GSM/GPRS связи, авиационной связи системы ADS-B (АЗН-В), спутниковой или комбинированной сети электротехнической связи.
5. Способ по п.1, отличающийся тем, что управление автопилотом БЛА-ТС осуществляется командами корректировки параметров движения и маршрута, поступающими из ЦКУД сигналами по защищенным каналам сетей мобильной GSM/GPRS связи, и/или авиационной связи системы ADS-B (АЗН-В), и/или спутниковой связи.
6. Способ по п.1, отличающийся тем, что модель маршрута БПЛА-ТС, рассчитанная в ЦКУД, включенная в суточный план движения и направленная ЦКУД в виде формализованного плана движения автопилоту БПЛА-ТС, может отражать комбинированный 4-D маршрут, включающий движение БЛА-ТС по наземной, надводной поверхности и в воздухе.
7. Способ по п.1, отличающийся тем, что в ЦКУД рассчитывают модель 4-D маршрута БЛА-ТС с учетом требуемой пропускной способности сегментов воздушного, наземного пространств и включают ее в суточный план движения, который является уточненным результатом стратегического и оперативного планирования.
8. Способ по п.1, отличающийся тем, что на основе модели 4-D маршрута БЛА-ТС в ЦКУД рассчитывают суточный план движения с учетом приоритетности и категорированности маршрутов для экстренных служб и других видов ТС, имеющих литерные преимущества.
9. Способ по п.1, отличающийся тем, что по заявке эксплуатанта БЛА-ТС в ЦКУД рассчитывают модель маршрута для движения БЛА-ТС по воздушному и/или наземному пространству, включающему транспортные коммуникации и транспортную инфраструктуру всех видов транспорта.
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЭКСПЛУАТАЦИЕЙ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОГО ПОЛЕТА С ВЫЯВЛЕНИЕМ СЛУЧАЕВ НЕСАНКЦИОНИРОВАННОГО ИЗМЕНЕНИЯ ТРАФИКА ПОЛЕТА | 2017 |
|
RU2662611C1 |
| US 9754496 B2, 05.09.2017 | |||
| US 9821910 B1, 21.11.2017 | |||
| US 20170248969 A1, 31.08.2017. | |||

