Область техники, к которой относится изобретение
Транспортирование; воздухоплавание, авиация, космонавтика; летательные аппараты тяжелее воздуха.
Уровень техники
Управляемая посадка космических аппаратов в настоящее время влечет за собой высокие накладные расходы. Жесткие крылья шаттлов на участке выведения создавали дополнительное сопротивление и были уязвимы для пролетающих предметов, имели значительный вес, на участке входа в атмосферу требовали теплозащиты высоконагруженной конструкции, и лишь на этапе посадки приносили пользу возможностью маневра и точного приземления. Причем только при наличии в месте посадки бетонной посадочной полосы. Использующиеся сейчас парашюты Союзов описанных минусов не имеют, но не имеют и необходимого плюса. И если на Земле неточная посадка может быть компенсирована группой подбора, то где-нибудь на Марсе посадка вдалеке от требуемого места может оказаться фатальной.
Помочь выйти из описанной ситуации мог бы парашют-крыло. Благодаря наличию аэродинамического качества он обладает свойством планирующего полета, что позволяет решать задачи точной доставки грузов в труднодоступные районы, посадки космических летательных аппаратов (КЛА) на Землю и другие имеющие атмосферу планеты, спасения летательных аппаратов. При этом планирующий парашют компактно укладывается и имеет относительно малый вес.
Однако в ситуациях, когда масса десантируемого груза или спускаемого аппарата достаточно высока, или окружающая его атмосфера достаточно разряжена, потребная для мягкой безаэродромной посадки площадь планирующего парашюта оказывается столь большой, что это сильно замедляет наполнение купола, увеличивает амплитуду его нештатных эволюции и риск разрыва или запутывания его оболочки.
Бороться с этой неприятностью можно, придав перед посадкой крылу дополнительное вращение. Благодаря тому, что подъемная сила растет пропорционально квадрату скорости относительно среды, вращающееся крыло может обеспечить необходимое гашение скорости меньшей площадью.
Можно заставить крыло авторотировать при вращении относительно полезного груза, для чего потребуется перекосить купол относительно точек подвеса. Получившееся движение будет подобно полету семени клена. Но поскольку в нашем случае крыло мягкое и поддерживает форму с помощью строп, то перекосить его относительно полезного груза весьма затруднительно - форма крыла при этом сильно искажается.
Также сложно обеспечить авторотирующий управляемый спуск парашютирующей системе на основе купола с симметричным распределением лопастей относительно оси вращения. При этом несимметричное обтекание двухоболочкового ротора при раскрытии делает последнее весьма затруднительным.
Раскрытие изобретения
Есть возможность придать крылу вращение вокруг горизонтальной оси, подобно гребному колесу. Такого рода вращение ротора используется и предлагается, например, в ветроэнергетических установках с ортогональными роторами, в частности подобных изложенной в патенте РФ №2240444. Следует заметить, что без изменения циклического угла атаки вращение крыла не будет останавливаться и ротор может достигнуть высокой эффективности лишь при значении коэффициента быстроходности (величине отношения скорости крыла к скорости потока) приблизительно больше 3 [1].
Для сравнительной оценки эффективности несущих систем с неподвижным и вращающимся крылом мы можем опереться на известное выражение мощности ветродвигателя с ортогональным ротором [2]:
где Ср - коэффициент мощности; D - диаметр ротора; Н - размах его лопасти; V - скорость набегающего потока [м/с]; ρ - плотность среды [кг/м3]; ηобщ - задаваемый предварительно КПД. По статистике значение коэффициента мощности ветродвигателей с ортогональным ротором составляет 0,3-0,35. Ориентируясь по нижней границе, примем его равным 0,3. КПД оставим равным единице. Тогда разность скоростей потока перед и за ротором составит 
По закону сохранения импульса на ротор при этом будет действовать сила P=D·H·ρ·V·ΔV=0,112·D·H·ρ·V2.
Основываясь на том, что нам требуется одинаковая сила как от неподвижного крыла, так и от ротора, а также учитывая, что площадь неподвижного крыла Sкр можно выразить через его размах и удлинение λ, получим потребный для равенства коэффициент подъемной силы Су неподвижного крыла:
Для вполне реализуемых удлинения 4 и отношения двойной высоты стропления к размаху 1,6 потребный Су составит 1,4. Согласно практике рабочий Су как для лопасти, ротора, так и для неподвижного крыла, составляет порядка 0,5. Следовательно, мы можем заключить, что вращение крыла позволяет уменьшить его потребную площадь более чем в два раза.
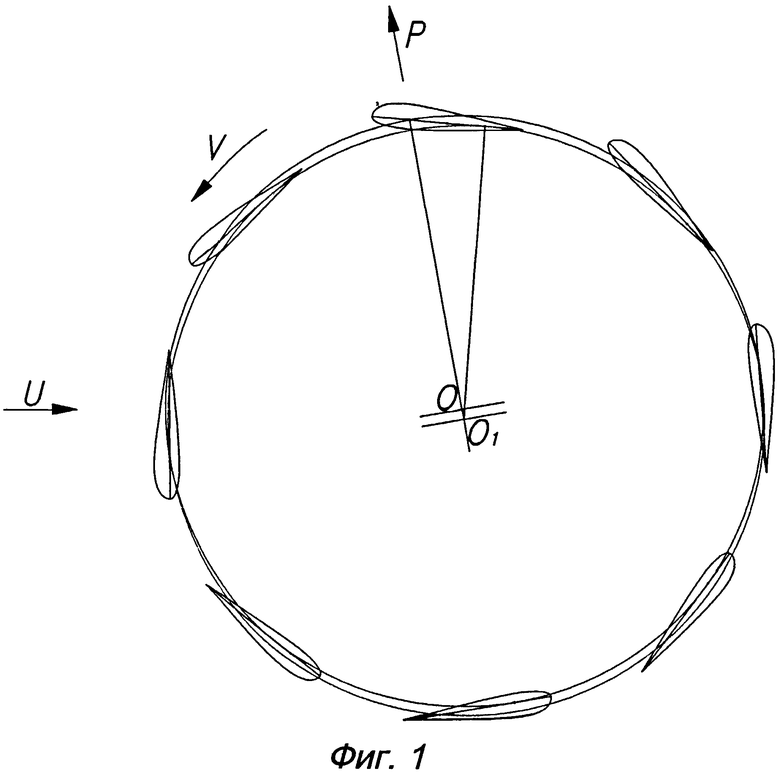
Для планирующего спуска и полета апробированы ортогональные роторы с качающимися лопастями в несущих системах летательных аппаратов, известных как циклокоптеры или цикложиры. Было установлено, что цикложир способен к авторотации при планирующем полете [9]. Кинематическая схема изменения установочного угла лопастей цикложира при авторотации представлена на Фиг.1.
Однако известные схемы цикложиров имеют многолопастные роторы, в связи с чем возникает вопрос, сможем ли мы инициировать и поддерживать вращение однолопастного ротора на основе крыла планирующей парашютной системы, тем более с учетом описанного выше ограничения на минимальную скорость крыла для самоподдержания вращения?
Ответ на этот вопрос дали спортсмены парапланеристы, освоившие фигуру аэробатики параплана под названием Infinity Tumble - непрерывное вращение купола по тангажу, поддерживаемое действиями пилота. Происходит эта фигура от аэробатического элемента Tumble, в котором выполняется один или несколько оборотов купола вокруг горизонтальной оси с использованием энергии предшествующего разгона. Подпитка энергией для продолжительного вращения производится, например, путем периодического подсрыва (и соответственно торможения) крыла так, чтобы пилот благодаря эффекту маятника слегка подлетал вверх, после чего клеванты отпускаются, и уходящий вниз пилот своим весом дает выходящему в зенит крылу дополнительный импульс на вращение. Работа клевантами ведется в связи с тем, что поддержание вращения циклическим изменением установочного угла крыла с помощью свободных концов с распространенной сейчас кинематикой превышало бы физические и координационные возможности пилота. Второй способ поддержания крыла в непрерывном вращении, доступный для крыльев с высокомоментными профилями, заключается в отталкивании от себя первых рядов свободных концов в моменты пролета крыла через зенит.
Уменьшить нагрузки на пилота или привод управления возможно при использовании свободных концов с компенсацией управляющего усилия. Принцип компенсации управляющих усилий изложен в патенте RU 2456210 и состоит в том, что при втягивании свободного конца одного из рядов строп в полиспастный механизм удлиняются один или несколько свободных концов других рядов.
Для облегчения посадки на вращающемся мягком крыле можно использовать накопленную кинетическую энергию вращения для получения дополнительной подъемной силы путем придания профилю крыла дополнительной кривизны в верхнем секторе круга вращения. Для аккуратной посадки понадобится так дозировать прибавку кривизны профиля, чтобы крыло перестало вращаться в положении, близком к вертикальному, и на близкой к нулевой высоте целевой нагрузки.
Энергичное периодическое изменение установочного угла и кривизны крыла во время вращения способно само по себе создавать пропульсивную силу, поддерживая вращение крыла. Оно же способно придать функцию движителя мягкому не вращающемуся крылу без использования маховых движений консолями.
Подвести дополнительную энергию для вращения крыла и создания необходимой тяги можно, также закрепив свободные концы на вращающихся рычагах, работающих аналогично предплечьям спортсмена при тренировке со скакалкой.
Практика показывает, что наилучшими несущими свойствами при сильном изгибе обладает мягкое крыло со сдувом пограничного слоя с верхней поверхности в районе перегиба, достигаемым наличием в этом районе профилированной щели (патент RU 2389644). Отодвинуть начало срыва потока в область еще более сильного изгиба профиля крыла может помочь установка турбулизаторов (в виде нашивок на оболочке) в области перегиба, например, так как показано на фиг.2. На данной фигуре турбулизаторы обозначены поз.1, закрывающая их в обычном полете и подтягивающая воздухозаборник заднего сегмента крыла при раскрытии лента - поз.2, передний сегмент верхней оболочки - поз.3, задний сегмент верхней оболочки - поз.4, промежуточный сегмент верхней оболочки - поз.5, передний сегмент нервюры - поз.6, задний сегмент нервюры - поз.7.
Старт моторного полета с вращающимся крылом может производиться как с воздуха, так и с земли, например посредством прыжкового взлета. Импульс для прыжка летательного аппарата может передаваться как катапультным устройством, так и движителем на борту самого летательного аппарата. Перед прыжковым стартом крыло может быть разложено на земле. В последнем случае для уменьшения сопротивления строп и увеличения удлинения крыла можно использовать в его конструкции распорные элементы, подобные описанным в патенте RU 2444462. Для увеличения усилия на раскрытие консолей мягкого крыла с распорными элементами при его возможных сложениях (жесткости при подвороте прижимаются потоком к нижней кромке крыла, и давления наддува в полости крыла для раскрытия консоли может оказаться недостаточно) в вершинах или стыках ребер пирамид, образованных распорными элементами, могут устанавливаться упругие элементы, распирающие стержни в полетное положение. При этом следует заметить, что в связи с повышенными скоростями крыла при вращении, а также действием центробежных сил на находящийся в его полости воздух, сложения крыла при вращении менее вероятны, чем в конфигурации с неподвижным крылом.
Возможен также трубный старт аппарата для моторного полета с вращающимся крылом, когда как сам аппарат, так и крыло, уложенное в чехол (d-bag), в исходном состоянии находятся в капсуле-трубе. При выстреле аппарат с силой выталкивается из трубы, d-bag задерживается фалом и расчековывается, освобождая крыло. Накопленная при выстреле кинетическая энергия придает крылу первоначальный импульс на вращение.
В связи с цикличностью действия вращающегося крыла на летательный аппарат оптимальным представляется его использование для беспилотных машин. Однако адаптивный демпферный подвес обитаемого отсека может сделать полет аппарата описанного типа вполне комфортным и для человека.
Библиографический список
1. Фатеев Е.М. Ветродвигатели и ветротурбины / Е.М. Фатеев - М.: Сельхозгиз, 1957.
2. Синеглазов В.М., Алешкин С.С., Кульбака А.В. Анализ ветроэнергетических установок с вертикальной осью вращения. Електронiка та системи управлiння. 2012. №3(33) стр.67-74.
3. Редчиц Д.А. Аэродинамика вращающейся лопасти ротора Дарье. ВIСНИК ДHIПРОПЕТРОВСЬКОГО УНIВЕРСИТЕТУ, 2007, Серiя МЕХАНIКА. Випуск 11, том 2.
4. Яковлев А.И. Прогнозирование мощностных и моментных характеристик ветроколеса с вертикальной осью вращения и различными аэродинамическими профилями рабочих лопатей / А.И. Яковлев, М.А. Затучная, И.Г. Головчинер, А.А. Зайкин // Нетрадиционные источники, передающие системы и преобразование энергии. 1997.
5. Абрамовский Е.Р. Аэродинамика ветродвигателей / Е.Р. Абрамовский, С.В. Городько, Н.В. Свиридов // ВIСНИК ДНIПРОПЕТРОВСЬКОГО УНIВЕРСИТЕТУ, 1987.
6. Грузинов В.И. и др. Крыльчатые движители. Изд-во Судостроение, 1973 г.
7. Кривцов B.C. Неисчерпаемая энергия: учеб.: в 4-х кн. Ветроэлектрогенераторы / B.C. Кривцов, A.M. Олейников, А.И. Яковлев. - X.: Нац. аэрокосм. ун-т ХАИ; Севастополь: Севаст. нац. техн. ун-т. - Кн. 1. - 2003.
8. Кривцов B.C. Неисчерпаемая энергия: учеб.: в 4-х кн. Ветроэнергетика / B.C. Кривцов, A.M. Олейников, А.И. Яковлев. - X.: Нац. аэрокосм. ун-т ХАИ, Севастополь: Севаст. нац. техн. ун-т. - Кн.2. - 2004.
9. «The Cyclogyro», Vertiflight, The American Helicopter Society, 2005, Vol.51; No.2, pages 16-19.
10. Sachse, H., "Kirsten-Boeing Propeller," NACA Technical Memorandum No.351, 1926.
11. Kirsten, F., "Cycloidal Propulsion Applied to Aircraft," Transactions of the American society of Mechanical Engineers, Vol.50, No. AER-50-12, 1928, pp.25-47.114.
12. Shackleton, W., The Rohrbach Rotating Wing Aeroplane, Flight, pp.1087-1090, 1122-1124, November 1933.
13. Strandgren, С., "The Theory of the Strandgren Cyclogyro," NACA Report 727, 1933.
14. Wheatley, J., "Simplified Analysis of the Cyclogyro Rotating Wing System," NACA Report 467, 1933.
15. Wheatley, J., "Rotating-wing Aircraft Compared to Conventional Airplanes," S. A. E. Journal (Transactions), Vol.34-35, April 1934, pp.115-116.
16. Wheatley, J., Choice of Airfoils for Rotating Wing Aircraft, Journal of the Aeronautical Sciences, Vol.1, No.2, April 1934, pp.88-90.
17. Crowe, J., The Problem of Vertical Flight: An Examination of the Characteristics of the Helicopter in Comparison with the Autogiro and Cyclogiro, Aircraft Engineering and Aerospace Technology, Vol.6, No.11, pp.292-296, 1934.
18. Windley, R., and Wheatley, J.В., "Wind Tunnel Tests of a Cyclogiro Rotor," NACA Technical Note 528, 1935.
19. Kirsten, F., "Cycloidal Propulsion in Air," Bulletin No.79, Engineering Experiment Station Series, University of Washington, March 1935.
20. Rumph, L., Static Thrust Analysis of the Cyclogiro Lifting System, M.S. Thesis, Aeronautical Engineering, Georgia Institute of Technology, 1936.
21. Garrick, I., «Propulsion of a Flapping and Oscillating Airfoil,» NACA Technical Report 567, 1937.
22. Eastman, F., Cottas, N., Barkheines, G., "Wind Tunnel Tests on a High Pitch Cyclogyro," University of Washington Aeronautical Laboratory Report 191-A, 1943.
23. Heuver, H. and Hage, R., Analytical Study of the Performance of a Cycloidal Propeller and Preliminary Survey of a Fighter-Type Design, AAF Materiel Center Command Memorandum Report No.ENG-51/P706-84, 1943.
24. Bushler, G., Foshag, W., "USAAVLABS Technical Report 69-13: Review and Preliminary Evaluation of Lifting Horizontal-Axis Rotating-Wing Aeronautical Systems (HARWAS)," U.S. Army Aviation Materiel Laboratories Fort Eustis, Virginia, Contract DAAJ02-67-C-0046, Aerophysics Company, Washington DC, March 1969.
25. Boschma, J., "Cycloidal Propulsion for UAV VTOL Applications", Naval Air Warfare Center SBIR Report N98-022, 1998.
26. Gibbens, R., Boschma, J., and Sullivan, C., "Construction and Testing of a New Aircraft Cycloidal Propeller," AIAA Paper AIAA-1999-3906, AIAA Lighter-Than-Air Systems Technology Conference, Norfolk, VA, 1999.
27. McNabb, M., Development of a Cycloidal Propulsion Computer Model and Comparison with Experiment, Master′s thesis, Mississippi State University, December 2001.
28. Boschma, J., "Modern Aviation Applications for Cycloidal Propulsion", AIAA-2001-5267, Aircraft, Technology Integration, and Operations Forum, 1st, Los Angeles, CA, Oct. 16-18, 2001.
29. McNabb, M., and Boschma, J., "Cycloidal Fan (CycloRan) for Shipboard Applications", ShipTech 2003 Proceedings, 2003.
30. Losilevskii, G., and Levy, Y., Aerodynamics of the Cyclogiro, AIAA-2003-3473, 33rd AIAA Fluid Dynamics Conference and Exhibit, Orlando, Florida, 2003.
31. Kim, S., Yun, C., Kim, D., Yoon, Y., and Park, I., Design and Performance Tests of Cycloidal Propulsion Systems. AIAA-2003-1786, 44th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Norfolk, Virginia, 2003.
32. Gibbens, R., "Improvements in Airship Control Using Vertical Axis Propellers," AIAA 3rd Annual Aviation Technology, Integration, and Operations Tech. AIAA-2003-6853, 3rd Annual Aviation Technology, Integration, and Operations (ATIO) Forum, Denver, Colorado, 2003.
33. Onda, M., Matsuuchi, K., Ohtsuka, N., and Kimura, Y., "Cycloidal Propeller and its Application to Advanced LTA Vehicles," AIAA 3rd Annual Aviation Technology, Integration, and Operations Tech, 2003.
34. Yun, C., Park, 1., Lee, H., Jung, J., and Hwang, I., "Design of a New Unmanned Aerial Vehicle Cyclocopter." 60th American Helicopter Society Forum, pp.24-35, 2004.
35. Prouty, R.W., "The Cyclogyro" pp.16-19, Vertiflite Vol.51, No.2, American Helicopter Society, 2005.
36. Parsons, E., "Investigation and Characterization of a Cycloidal Rotor for Application to a Micro-Air Vehicle," Masters Thesis, Aerospace Engineering Dept., University of Maryland, College Park, MD, 2005.
37. Yun, C., Park, I., Seong Hwang, I., Kim, S., Thrust control mechanism of VTOL UAV cyclocopter with cycloidal blades system, Journaj of Intelligent Material Systems and Structures 16 (11-12), pp.937-943, 2005.
38. Iosilevski, G., and Levy, Y., Experimental and Numerical Study of Cyclogiro Aerodynamics, AIAA Journal, Vol.44, No.12, pp.2866-2870, 2006.
39. Yu, H., Bin, L., and Rong, H., "The Research on the Performance of Cyclogyro", AIAA paper AIAA-2006-7704, 2006.
40. Hwang, I., Hwang, C., Min, S., Jeong, I., Lee, Y., and Kim, S., "Efficiency Improvement of Cycloidal Wind Turbine by Active Control of Blade Motion", Proceedings of the SPIE, Article # 617311, 2006.
41. Наrа, N., Tanaka, K., Ohtake, H., Wang, H., Development of a Flying Robot with Pantograph-based Variable Wing Mechanism, 2007 IEEE International Conference on Robotics and Automation, pp.349-354.
42. Siegel, S., Seidel, J., Cohen, K., and McLaughlin, Т., "A Cycloidal Propeller Using Dynamic Lift," AIAA Paper 2007-4232, pp.1682-1695, 2007.
43. Sirohi, J., Parsons, E., & Chopra, I. (2007). Hover Performance of a Cycloidal Rotor for a Micro Air Vehicle. Journal of American Helicopter Society. Vol.52. (3). July. pp.263-279.
44. Tanaka, K., Suzuki, R., Emaru, Т., Higashi, Y., and Wang, H. "Development of a cyclogyro-based flying robot with variable attack angle mechanisms," IEEE/ASME Transactions on Mechatronics, Vol.12,, No.5, pp.565-570, 2007.
45. Benedict, M., Chopra, I., Ramasamy, M., Leishman. J.G., Experimental investigation of the cycloidal-rotor, concept for a hovering micro air vehicle, Annual Forum Proceedings - AHS International 2, pp.11071-1092, 2008.
46. Hwang, I., Min, S., Lee, Y., and Kirn, S., "Development of a Four-Rotor Cyclocopter", Journal of Aircraft, Vol.45, pp.2151-2157, 2008.
47. Hara, N., Tanaka, К., Ohtake, H., Wang, H.O., Development of a flying robot with a pantograph-based variable wing mechanism, IEEE Transactions on Robotics 25 (1), pp.79-87, 2009.
48. Boirum, С., and Post, S., Review of Historic and Modern Cyclogyro Design, AIAA, 2009.
49. Higashi, Y., Tanaka, K., and Ohtake, H. (2010) Construction of Simulation Model of a Flying Robot with Variable Attack Angle Mechanism. Transaction of the Japan Society of Mechanical Engineers, Part C. pp.361-370.
50. Benedict, M., Ramasamy, M., & Chopra, I. (2010). Improving the Aerodynamic Performance of Micro-Air-Vehicle-Scale Cycloidal Rotor: An Experimental Approach. Journal of Aircraft. Vol.47. No.4. July/August, pp.1117-1125.
51. Benedict, M., Ramasamy, M., Chopra, 1., & Leishman, J. G. (2010). Performance of a Cycloidal Rotor Concept for Micro Air Vehicle Applications. Journal of American Helicopter Society. Vol.55. No.2. April pp.022002-1-022002-14.
52. Benedict, M., Gupta, R., and Chopra, I., (2011) Design, development and flight testing of a twin-rotor cyclocopter micro air vehicle. American Helicopter Society Annual Forum, pp.135-148.
53. 45th AIAA/ASME/SAE/ASEE Joint Propulsion Conference. Review of Historic and Modern Cyclogyro Design. Curtis Boirum, Scott Post. Bradley University. Chapter DOI: 10.2514/6.2009-5023. Publication Date: 02 August 2009-05 August 2009.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления тягой беспилотного летательного аппарата вертикального взлета и посадки с циклическими движителями | 2022 |
|
RU2781315C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2016 |
|
RU2619679C9 |
| ПОДВЕСКА, АВТОСТАБИЛИЗИРУЮЩАЯ МЯГКОЕ ПРИВЯЗНОЕ КРЫЛО (ВАРИАНТЫ) | 2010 |
|
RU2456210C2 |
| КОНСТРУКТИВНЫЕ ЭЛЕМЕНТЫ ДЛЯ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С МЯГКИМ КРЫЛОМ | 2015 |
|
RU2584353C1 |
| ТРЕУГОЛЬНОЕ КРЫЛО ДЛЯ СВЕРХЗВУКОВЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2487050C1 |
| УСТРОЙСТВО ДЛЯ ОСЛАБЛЕНИЯ ВИХРЕВОГО СЛЕДА МЕХАНИЗИРОВАННОГО КРЫЛА (ВАРИАНТЫ) | 1998 |
|
RU2174483C2 |
| УСТРОЙСТВО БЕСКОНТАКТНОГО ВОЗБУЖДЕНИЯ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2017 |
|
RU2682582C1 |
| ПЛОСКОЕ ШУМОГЛУШАЩЕЕ СОПЛО ВОЗДУШНО-РЕАКТИВНОГО ДВИГАТЕЛЯ | 1999 |
|
RU2153091C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПО КРУГУ АВИАЦИОННОЙ БУКСИРОВОЧНОЙ ТРОСОВОЙ СИСТЕМЫ | 2011 |
|
RU2466062C1 |
| СИЛОВАЯ УСТАНОВКА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА ЛЕГЧЕ ВОЗДУХА | 1995 |
|
RU2125950C1 |
Изобретение относится к области авиации. Способ десантирования полезного груза с помощью крыла характеризуется тем, что на участке траектории спуска накопленная кинетическая энергия расходуется на придание крылу дополнительного импульса на вращение вперед. Крыло совершает полный оборот вокруг полезного груза и переходит в режим авторотации, вращаясь вокруг горизонтальной оси. Управление режимом авторотации и траекторией спуска осуществляется путем циклического изменения установочных углов атаки и кривизны профиля консолей крыла. Изобретение направлено на увеличение эффективности использования площади мягкого крыла в системах планирующего спуска и моторного полета. 2 з.п. ф-лы, 2 ил.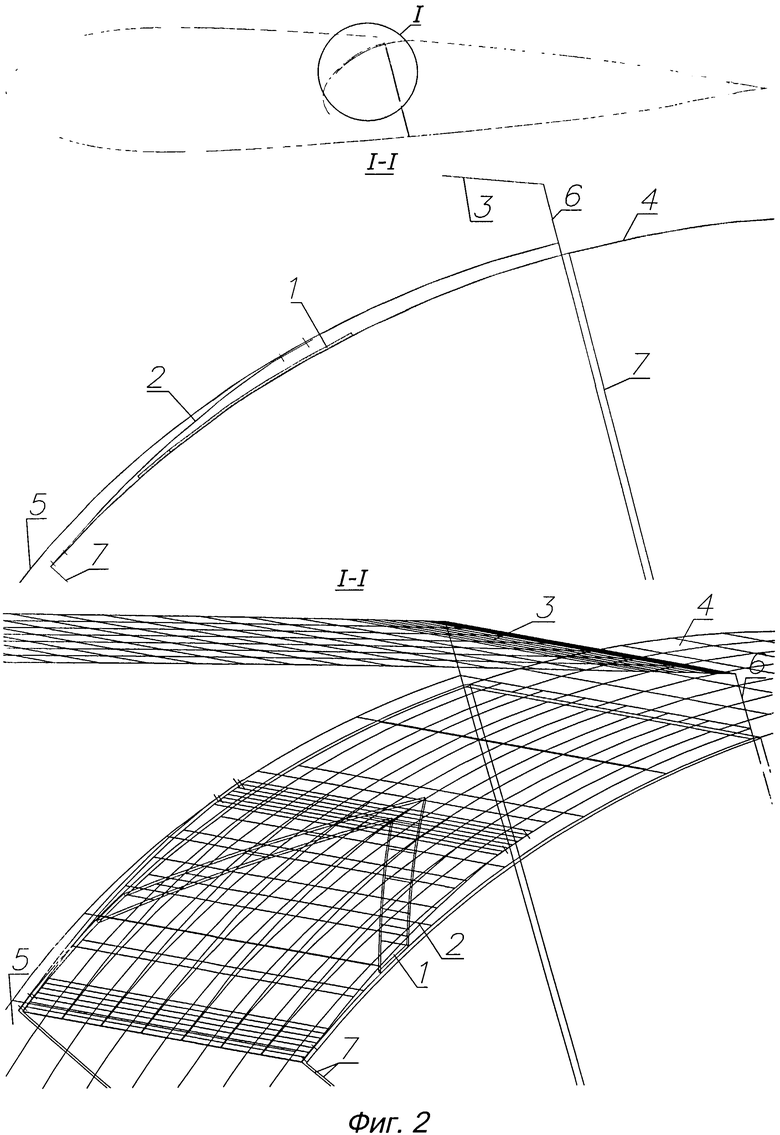
1. Способ десантирования полезного груза с помощью крыла, отличающийся тем, что на некотором участке траектории спуска накопленная кинетическая энергия расходуется на придание крылу дополнительного импульса на вращение вперед, в результате чего крыло совершает полный оборот вокруг полезного груза и переходит в режим авторотации, вращаясь вокруг горизонтальной оси, при этом управление режимом авторотации и траекторией спуска осуществляется путем циклического изменения установочных углов атаки и кривизны профиля консолей крыла.
2. Способ по п.1, отличающийся тем, что непосредственно перед посадкой накопленная кинетическая энергия вращения преобразуется в дополнительную подъемную силу путем придания профилю крыла дополнительной кривизны в верхнем секторе круга вращения так, чтобы крыло перестало вращаться в положении, близком к вертикальному, и на близкой к нулевой высоте платформы с полезным грузом.
3. Способ по п.1, отличающийся тем, что крыло на некотором участке полета переводится из режима авторотации в режим тягового и подъемного движителя путем передачи циклического момента от двигателя на крыло прикрепленными к свободным концам рычагами с осью вращения выше центра масс платформы с полезным грузом.
| US 4844384 A, 04.07.1989 | |||
| US 6164594 A1, 26.12.2000 | |||
| ПАРАШЮТ | 1929 |
|
SU19467A1 |

