Изобретение относится к области авиации, в частности к способу управления винтокрылыми летательными аппаратами, и может быть использовано как способ управления тягой в перспективных беспилотных летательных аппаратах вертикального взлета и посадки с циклическими движителями.
Известно устройство циклического движителя (далее - движителя), предназначенного для создания тяги в перспективных беспилотных летательных аппаратах вертикального взлета и посадки с циклическими движителями [1], выбранное в качестве прототипа. По прототипу, движитель состоит из лопастей, шарнирно закрепленных в опорах, вращающихся вокруг оси движителя. Лопасти вращаются по круговой траектории вокруг оси вращения приводного устройства, а также вокруг собственной оси закрепления. Установлен механизм управления углом установки лопастей: центральное устройство смещения соединено с каждой из лопастей через тяги и опорный узел, причем смещающее устройство задает ось вращения эксцентрикового подшипника, посредством которого устанавливается расстояние до оси движителя. Узел соединения тяги и лопасти расположен под постоянным углом к касательной движения лопасти при нулевом смещении лопасти. Технический результат прототипа заключается в снижении нагрузок, оказываемых на элементы движителя.
Недостаток данного решения заключается в том, что механизм управления установкой лопастей является массивным элементом в конструкции существующих движителей [2] и [3]. Массивность механизма определяется попыткой механически определить закон движения лопастей - циклограмму, что приводит к наличию эксцентрика, управляющих тяг, подшипниковых узлов, а также узлов для сопряжения со стороны лопасти. Помимо этого, механизм управления вносит вклад в суммарное лобовое сопротивление, создаваемое движителем. Кроме того, практически реализованные решения по управлению положением лопастей для беспилотных летательных аппаратов вертикального взлета и посадки с циклическими движителями обеспечивают перемещение лопасти по механически ограниченному математическому закону - циклоиде.
Указанные выше недостатки предполагается устранить посредством замены механизма управления углом установки лопастей. В предлагаемом устройстве управление углом установки лопастей осуществляют электронно посредством бортового вычислителя беспилотного летательного аппарата (фиг. 1).
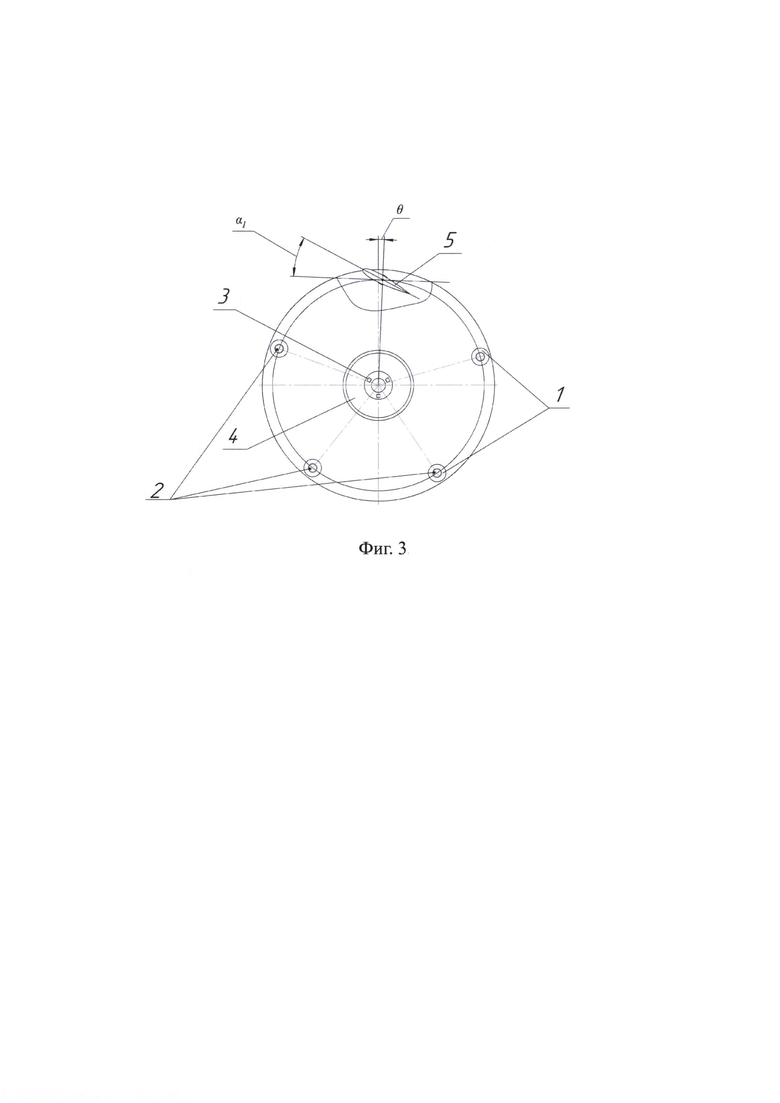
На фиг. 1 и фиг. 3 обозначены:
1 - электромеханические актуаторы;
2 - абсолютный датчик углового положения лопасти;
3 - абсолютный датчик углового положения оси движителя;
4 - электродвигатель;
5 - лопасти;
6 - опоры.
Для управления углом установки лопастей на оси вращения каждой лопасти 5, шарнирно закрепленной в опорах 6, устанавливаются электромеханические актуаторы 1, либо пара актуаторов на обоих краях оси, работающих при ширине полосы пропускания управляющих сигналов кратно выше частоты вращения движителя. Каждая лопасть оснащена абсолютным датчиком углового положения лопасти 2. На оси вращения движителя устанавливают абсолютный датчик углового положения оси движителя 3. Вращение движителя обеспечивает электродвигатель 4. Информационное и силовое сопряжение движителя с бортовым комплексом управления беспилотным летательным аппаратом осуществляется посредством токосъемников. Управление движителем - цифровое, через бортовой вычислитель беспилотного летательного аппарата.
Алгоритм управления движителем представлен на фиг. 2. Информация об угловом положении движителя (угол 6) поступает на бортовой вычислитель в составе данных объективного контроля беспилотного летательного аппарата. На основании данных объективного контроля и заданных оператором параметров вычислитель формирует вектор навигационного решения f(θ, …)=[α1, α2, …, αn], включающий в себя оптимальные уставки положений каждой из лопастей движителя α1, α2, …, αn для каждого n-лопастного движителя беспилотного летательного аппарата. Варианты размещения движителей на беспилотном летательном аппарате приведены в различных публикациях (например, figure 2 b, figure 4, 5 в [3]).
На фиг. 3 показаны α1 - уставка углового положения лопасти относительно касательной к траектории вращения лопасти движителя, θ-угловое положение вала движителя.
Предлагаемый способ позволяет снизить количество механически нагруженных элементов движителя, снизить количество вынесенных за пределы движителя элементов, оказывающих влияние на лобовое сопротивление, обеспечивается гибкость выбора математического закона движения лопастей (циклограммы) для различных режимов полета беспилотного летательного аппарата (взлет и посадка, крейсерский скоростной полет), достичь максимально возможной тяги. Также реализуется возможность флюгирования движителя.
Источники информации
1. Antriebsvorrichtung für ein Fluggerät: заявка DE102017011890 A1. ФРГ: МПК В64С 11/006 / Winderl М., Lanser S.; заявитель Cyclotech GmbH; заявл. 14.12.17; опубл. 19.06.19.
2. Min S., Lee С.H., Seung M., Kim Y, Hur C, Kim S. Experimental Study of a Quadrotor Cyclocopter // Journal of the American Helicopter Society. 2015. Vol. 60, No. 3. Pp. 1-10//JAHS.60.032010.
3. Schwaiger M., Wills D. D-Dalus VTOL - efficiency increase in forward flight // Aircraft Engineering and Aerospace Technology. 2015. Vol.88. No. 5. Pp.594-604. / AEAT-04-2015-0104.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОПЛАНОМ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2795885C1 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| СИЛОВАЯ УСТАНОВКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРОВАННЫМ УПРАВЛЕНИЕМ (ВАРИАНТЫ) | 2023 |
|
RU2820238C1 |
| Мультикоптер вертикального взлета и посадки с импеллерными движителями | 2020 |
|
RU2761991C2 |
| Устройство для позиционирования беспилотного летательного аппарата на посадочной площадке | 2019 |
|
RU2707465C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Способ работы крыльчатого движителя и устройство для его осуществления | 2019 |
|
RU2720699C1 |
| ТЕЙЛСИТТЕР | 2019 |
|
RU2775087C2 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| РОТОР "ВОЗДУШНОЕ КОЛЕСО". ГИРОСТАБИЛИЗИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ИСПОЛЬЗУЮЩИЕ РОТОР "ВОЗДУШНОЕ КОЛЕСО", НАЗЕМНОЕ/ПАЛУБНОЕ УСТРОЙСТВО ИХ ЗАПУСКА | 2013 |
|
RU2538737C9 |

Изобретение относится к способу управления тягой беспилотного летательного аппарата вертикального взлета и посадки с циклическими движителями. Для управления тягой приводят во вращение лопасти, вращающиеся вокруг собственной оси, а также вращающиеся вокруг оси движителя, приводимого во вращение электродвигателями. Управление углом установки лопастей движителя осуществляют электронно посредством бортового вычислителя беспилотного летательного аппарата, обрабатывающего сигналы датчиков углового положения, при помощи электромеханических актуаторов, которыми снабжена каждая лопасть. Обеспечиваются оптимальные уставки положений лопастей для каждого движителя, снижение лобового сопротивления на элементы движителя за счет уменьшения количества его механически нагруженных элементов. 3 ил.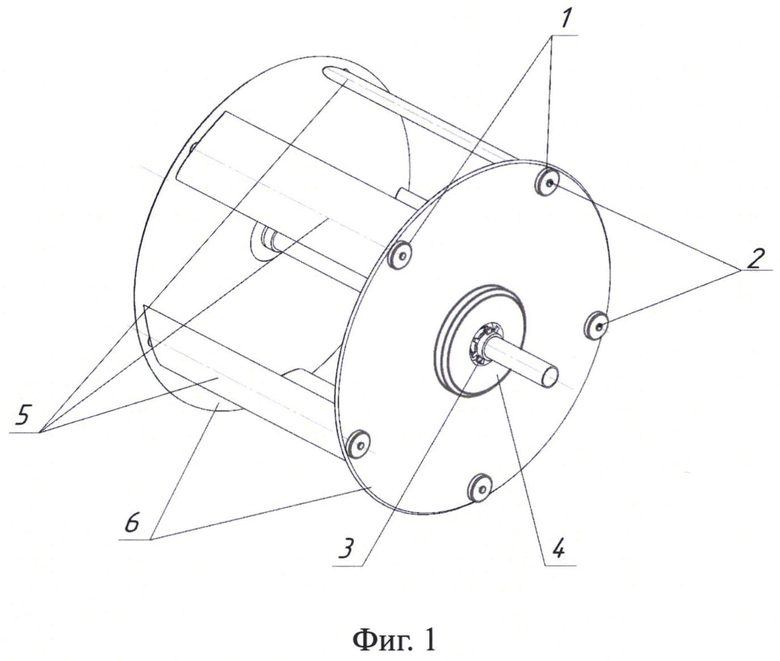
Способ управления тягой беспилотного летательного аппарата вертикального взлета и посадки с циклическими движителями, состоящими из лопастей, вращающихся вокруг собственной оси, а также вращающихся вокруг оси движителя, приводимого во вращение электродвигателем, отличающийся тем, что управление углом установки лопастей движителя осуществляют электронно посредством бортового вычислителя беспилотного летательного аппарата, для чего, каждую лопасть циклического движителя снабжают электромеханическим актуатором, работающим при ширине полосы пропускания управляющих сигналов кратно выше частоты вращения движителя; ось каждой лопасти и ось движителя оснащают абсолютными датчиками углового положения; информационное и силовое сопряжение движителей с бортовым комплексом управления беспилотного летательного аппарата осуществляют посредством токосъемников; по данным углового положения каждого движителя, а также заданных оператором параметров, вычислитель формирует вектор навигационного решения, включающий в себя оптимальные уставки положений лопастей для каждого движителя.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2016 |
|
RU2682954C1 |
| Моторный опрокидный плуг | 1930 |
|
SU33053A1 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| US 11161596 B2, 02.11.2021 | |||
| US 10800513 B2, 13.10.2020. | |||

