Предлагаемое устройство относится к области обработки радиосигналов и может быть использовано в радиолокационной технике, использующей сигналы с линейной частотной модуляцией, для моноимпульсного измерения радиальной скорости движущегося объекта одновременно с определением дальности до него.
Известны способы и радиолокационные станции измерения радиальной скорости объектов, которые являются аналогами предлагаемого устройства (патенты РФ №№2236694, 2211460, 2315333, 2362182, 2389040, 2427003, 2389039, 2060514, 2191405, 2429503, 2251710, 2309431). Эти способы основаны на использовании сигналов без внутриимпульсной модуляции.
Известен радиолокатор с линейной частотной модуляцией зондирующего сигнала (заявка на изобретение РФ №93032921), основным недостатком которого является отсутствие возможности измерения радиальной скорости объекта одновременно с определением дальности до него.
Известно устройство, являющееся прототипом предлагаемого устройства - "Измеритель скорости линейного изменения частоты внутри импульса" (патент РФ №2010243), содержащее блок формирования, информационный вход которого соединен с шиной входных сигналов, два счетчика и блок вычитания, отличающееся тем, что с целью повышения точности, в него введены блок управления и синхронизации, две цифровые линии задержки, N+1 элементов "И" и блок ждущего мультивибратора, причем счетчики выполнены в виде реверсивных, выход блока формирования подключен к суммирующему входу первого реверсивного счетчика и входу первой цифровой линии задержки, выход которой соединен с вычитающим входом первого счетчика, суммирующим входом второго реверсивного счетчика и входом второй цифровой линии задержки, выход которой подключен к вычитающему входу второго реверсивного счетчика и первому входу (N+1)-го элемента "И", выход которого через блок ждущего мультивибратора соединен со вторыми входами элементов "И" с первого по N-й, выходы первого и второго реверсивных счетчиков соединены соответственно с первой и второй группами входов блока вычитания, выходы которого с первого по N-й соединены с первыми входами соответствующих элементов "И", выходы которых подключены к выходам измерителя, первый выход блока управления и синхронизации соединен с управляющим входом блока формирования, а второй выход - с синхронизирующими входами первой и второй цифровых линий задержки и вторым входом (N+l)-го элемента "И".
Недостатком данного устройства является отсутствие возможности измерения величины отклонения скорости линейного изменения частоты внутри импульса при отражении его от движущегося объекта, которая пропорциональна значению радиальной скорости движущегося объекта.
Таким образом, целью изобретения является измерение радиальной скорости движущегося объекта по одному импульсу за счет измерения величины отклонения скорости линейного изменения частоты внутри импульса при отражении его от движущегося объекта.
Цель достигается тем, что в состав устройства включены два идентичных канала обработки зондирующего и отраженного линейно-частотно модулируемых импульсов, подключенных к первому и второму выходам электронного ключа, каждый канал состоит из последовательно соединенных: полосового фильтра, перемножителя (на один вход которого поступает линейно-частотно модулируемый импульс с выхода полосового фильтра, а на второй вход - тот же импульс, но задержанный в линии задержки), интегратора [1], схемы фазовой автоподстройки частоты [2], измерителя частоты. При этом выход измерителя частоты из состава каждого канала соединен с входом устройства сравнения, предназначенного для определения разности скоростей линейного изменения частоты внутри зондирующего и отраженного импульсов, выход устройства сравнения соединен с решающим устройством, которое на основе вычисленного значения разности скоростей линейного изменения частоты внутри зондирующего и отраженного импульсов принимает решение о радиальной скорости объекта.
Технической задачей данного изобретения является обеспечение возможности радиолокационной станции моноимпульсного измерения радиальной скорости объекта за счет вычисления разности скоростей линейного изменения частоты внутри зондирующего и отраженного линейно-частотно модулируемых импульсов, при сохранении возможности радиолокационной станции измерения дальности до объекта.
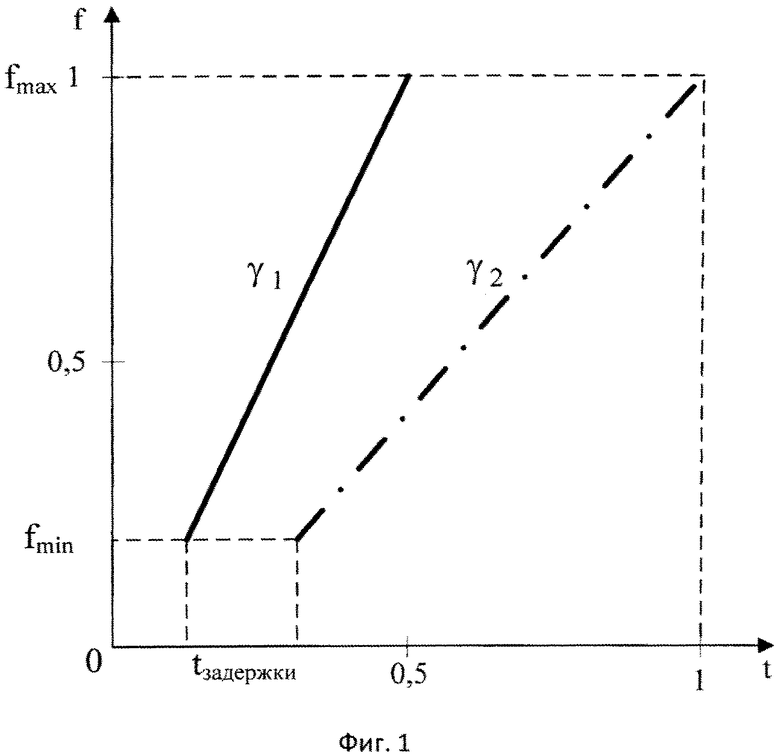
Известно, что мгновенная частота внутри зондирующего линейно-частотно модулируемого импульса изменяется во времени по закону:

где ƒ0 - несущая частота, τu - длительность импульса, γ1 - скорость линейного изменения частоты внутри зондирующего линейно-частотно модулируемого импульса.
Скорость линейного изменения частоты внутри зондирующего линейно-частотно модулируемого импульса рассчитывается по формуле:

где Δƒд - девиация частоты, ƒmax, ƒmin - максимальное и минимальное значение частоты импульса соответственно.
При отражении от движущегося с радиальной скоростью vr объекта все спектральные составляющие импульсов с частотой ƒ смещаются по частоте на величину Δƒ0, определяемую эффектом Доплера [3]:

где λ - длина волны, с - скорость света.
Следовательно, в отраженном от движущегося объекта линейно-частотно модулируемом импульсе значение частот ƒmax и ƒmin изменяется на величину

что соответствует скорости линейного изменения частоты внутри отраженного от движущегося объекта импульса γ2 (фиг. 1)

Из (5) следует, что радиальная скорость движущегося объекта может быть определена по формуле:

Следовательно, при известном значении γ1, измеренная величина отклонения Δγ позволяет вычислить радиальную скорость движущегося объекта vr:

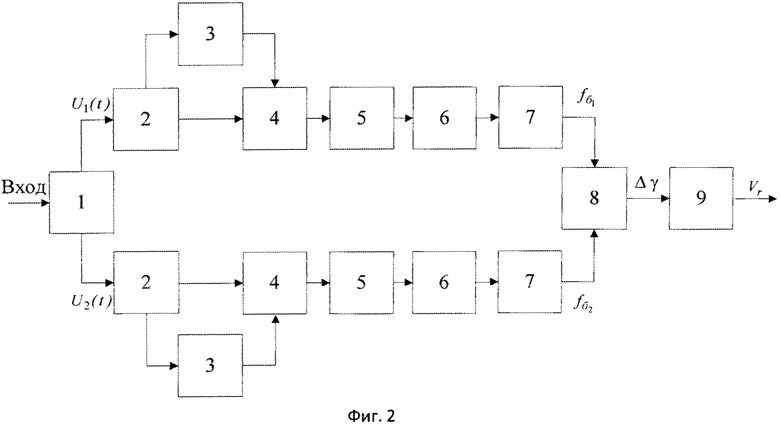
Для вычисления vr предлагается устройство, структурная схема которого представлена на фиг. 2.
На рисунке и в тексте приняты следующие обозначения:
1. Электронный ключ;
2. Полосовой фильтр;
3. Линия задержки;
4. Перемножитель;
5. Интегратор;
6. Схема фазовой автоподстройки частоты;
7. Измеритель частоты;
8. Устройство сравнения;
9. Решающее устройство.
Устройство работает следующим образом.
Поступающие на электронный ключ 1 зондирующий линейно-частотно модулируемый импульс U1(t) и отраженный от движущегося объекта линейно-частотно модулируемый импульс U2(t) коммутируются с соответствующим каналом обработки. Управление электронным ключом осуществляется синхронизатором радиолокационной станции [4].
Зондирующий линейно-частотно модулируемый импульс U1(t) поступает через полосовой фильтр 2 на первый вход перемножителя 4, на второй вход которого поступает этот же импульс, но задержанный в линии задержки 3 на τ3:

Перемножитель 4 подключен к входу интегратора 5, который дает на своем выходе сигнал с частотой биений ƒб, которая прямопропорционально зависит от скорости изменения частоты линейно-частотно модулируемого импульса и от времени задержки автокоррелятора:

Для измерения частоты радиоимпульсной последовательности, выделяемой на выходе интегратора 5, она преобразуется в непрерывный гармонический сигнал той же частоты с помощью схемы фазовой автоподстройки частоты 6 [2]. Полученный на выходе схемы фазовой автоподстройки частоты 6 непрерывный гармонический сигнал поступает на вход измерителя частоты 7, в котором определяется частота биений 
Второй канал аналогичен по принципу действия первому, но в нем происходит определение частоты биений 
С выходов элементов 7 обоих каскадов, измеренные значения ƒб поступают на вход устройства сравнения 8, в котором вычисляются скорости линейного изменения частоты внутри каждого поступившего импульса:

после чего определяется величина отклонения значения линейного изменения частоты внутри отраженного от объекта импульса относительно зондирующего импульса:

Полученное значение Δγ с выхода элемента 8 поступает на вход решающего устройства 9, которое рассчитывает радиальную скорость объекта vr по формуле (7).
Сравнение предложенного технического решения с прототипом и аналогами позволяет сделать вывод, что оно соответствует критерию новизны и обладает существенными отличиями. Положительный эффект достигается за счет введения указанных дополнительных узлов, обеспечивающих возможность вычисления величины отклонения значения линейного изменения частоты внутри отраженного от движущегося объекта импульса относительно зондирующего импульса, что позволяет радиолокационной станции измерять по одному импульсу радиальную скорость движущегося объекта одновременно с определением дальности до него.
На основании приведенного описания и структурной схемы предлагаемое устройство может быть изготовлено из известных комплектующих изделий с применением известного в радиоэлектронной промышленности технологического оборудования и использовано в радиолокационной станции с линейно-частотно модулируемыми сигналами для измерения радиальной скорости объекта одновременно с определением дальности до него.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ОБЪЕКТА ДИНАМИЧЕСКОЙ СИСТЕМОЙ РАДИОТЕХНИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2660160C1 |
| Способ радиолокационного моноимпульсного измерения дальности и радиальной скорости целей при зондировании сигналом с линейной частотной модуляцией | 2022 |
|
RU2796220C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСТОЯННОЙ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ПО ДАЛЬНОСТИ В ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С КВАЗИСЛУЧАЙНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2491572C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ДАЛЬНОСТИ ОБЪЕКТА | 2007 |
|
RU2393499C2 |
| СПОСОБ И УСТРОЙСТВО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ ПО УГЛОВЫМ НАПРАВЛЕНИЯМ В ОБЗОРНЫХ РЛС | 2011 |
|
RU2480782C1 |
| СИСТЕМА СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ С ИЗМЕРЕНИЕМ ДАЛЬНОСТИ, РАДИАЛЬНОЙ СКОРОСТИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ | 2016 |
|
RU2626380C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И РАДИАЛЬНОЙ СКОРОСТИ В РЛС С ЗОНДИРУЮЩИМ СОСТАВНЫМ ПСЕВДОСЛУЧАЙНЫМ ЛЧМ ИМПУЛЬСОМ | 2014 |
|
RU2553272C1 |
| РАЗНЕСЕННАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СО СТОРОННИМ ПОДСВЕТОМ СЕТЕЙ СОТОВОЙ СВЯЗИ СТАНДАРТА GSM | 2013 |
|
RU2563872C2 |
Изобретение относится к области обработки радиосигналов и может быть использовано в радиолокационной технике. Достигаемый технический результат - обеспечение возможности измерения радиальной скорости движущегося объекта при сохранении возможности измерения дальности до объекта. Указанный результат достигается за счет того, что устройство моноимпульсного измерения радиальной скорости объектов состоит из двух идентичных каналов обработки зондирующего и отраженного линейно-частотно модулированных (ЛЧМ) импульсов, подключенных к первому и второму выходам электронного ключа, при этом поступающие на электронный ключ зондирующий ЛЧМ импульс и отраженный от движущегося объекта ЛЧМ импульс коммутируются с соответствующим каналом обработки, причем каждый из каналов обработки состоит из последовательно соединенных полосового фильтра, перемножителя, на один вход которого с выхода полосового фильтра поступает ЛЧМ импульс, а на второй вход - тот же импульс, но задержанный в линии задержки, интегратора, схемы фазовой автоподстройки частоты, измерителя частоты, при этом выход измерителя частоты из состава каждого канала соединен с входом устройства сравнения, выход которого соединен с решающим устройством. 2 ил.
Устройство моноимпульсного измерения радиальной скорости объектов, состоящее из двух идентичных каналов обработки зондирующего и отраженного линейно-частотно модулированных импульсов, подключенных к первому и второму выходам электронного ключа, при этом поступающие на электронный ключ зондирующий линейно-частотно модулированный импульс и отраженный от движущегося объекта линейно-частотно модулированный импульс коммутируются с соответствующим каналом обработки, причем каждый из каналов обработки состоит из последовательно соединенных полосового фильтра, перемножителя, на один вход которого с выхода полосового фильтра поступает линейно-частотно модулированный импульс, а на второй вход - тот же импульс, но задержанный в линии задержки, интегратора, схемы фазовой автоподстройки частоты, измерителя частоты, при этом выход измерителя частоты из состава каждого канала соединен с входом устройства сравнения, выход которого соединен с решающим устройством.
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЛИНЕЙНОГО ИЗМЕНЕНИЯ ЧАСТОТЫ ВНУТРИ ИМПУЛЬСА | 1989 |
|
RU2010243C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| Ламповый вольтметр | 1940 |
|
SU61680A1 |
| JP 2012093321 A, 17.05.2012 | |||
| Устройство для уборки вырезанных из забоя блоков к камнерезной машине | 1984 |
|
SU1229347A1 |

