Настоящее изобретение относится, в частности, к устройству определения положения этажа лифтовой системы в соответствии с вводной частью пункта 1 формулы изобретения.
Из публикации 0847953 A1 известно устройство, причем при помощи этого устройства можно определить, когда кабина лифта достигает этажа. Это устройство содержит два постоянных магнита, идентично выровненных, причем эти магниты расположены в месте, характеризующем этаж, датчик магнитного поля для восприятия магнитного поля, генерируемого постоянными магнитами, а также блок оценки для оценки сигнала отдатчика магнитного поля.
Целью настоящего изобретения является, в частности, предоставление простого и экономичного устройства для надежного определения положения этажа в лифтовой системе. Эта цель достигается в соответствии с изобретением при помощи признаков, приведенных в пункте 1 формулы изобретения. Дополнительные варианты осуществления наглядно показаны в независимых пунктах формулы изобретения и в зависимых пунктах формулы изобретения.
Изобретение относится к устройству определения положения этажа лифтовой системы, содержащему по меньшей мере первый блок датчиков, который содержит первый датчик Холла и предназначен для цели распознавания по меньшей мере одного признака положения этажа, и содержит блок оценки, который предназначен для цели оценки признака положения этажа с целью генерирования сигнала этажа.
Предлагается, чтобы блок датчиков содержит по меньшей мере второй датчик Холла и блок оценки, предназначенный для цели оценки по меньшей мере двух признаков положения этажа для генерирования сигнала этажа. Путем использования по меньшей мере второго датчика Холла достигается простое и экономичное решение для падежного распознавания признака положения этажа.
Термин «признак положения этажа» следует понимать в этом контексте, в частности, как сигнал от датчика Холла на основании магнитного средства, причем это магнитное средство закреплено в месте, которое характеризует положение этажа. Термин «сигнал этажа» следует понимать в этом контексте как электрический или электронный сигнал, в частности триггерный сигнал, который предназначен для целей индикации, что достигнуто определенное относительное положение между кабиной лифта и этажом. Термин «блок оценки» следует понимать в этом контексте в значении, в частности, электронного блока для обработки аналоговых и/или цифровых электрических сигналов. Термин «предназначен для цели» следует понимать в этом контексте, в частности, в значении специально оборудованного, осуществленного и/или запрограммированного. Термин «магнитное средство» следует понимать в этом контексте, в частности, в значении средств для генерирования магнитного поля, в частности постоянных магнитов цилиндрической формы. Предпочтительно, по меньшей мере два датчика Холла расположены в известном пространственном расстоянии в двумерной плоскости, в результате чего возможно определение положения этажа чрезвычайно точно. Пространственное расстояние между датчиками Холла предпочтительно должно составлять от 50 до 100% от полной ширины на половине максимума (FWHM) сигнала от датчиков.
Термин «полная ширина на половине максимума» следует понимать в этом контексте, в частности, как пространственное расстояние двух положений датчика Холла, при котором сигнал от датчика Холла соответствует 50% максимальной амплитуды, генерируемой между положениями при помощи магнитного средства.
Кроме того, предлагается, чтобы устройство определения положения этажа содержало систему абсолютного положения и блок синхронизации, который предназначен для генерирования сигнала этажа и для синхронизации показаний данных абсолютного положения системы абсолютного положения с сигналом этажа, вследствие чего возможно определение и проверка абсолютного положения этажа быстрым и простым способом. Термин «система абсолютного положения» следует понимать в этом контексте как уже известную систему для определения абсолютного положения кабины лифта внутри лифтовой шахты приблизительного в соответствии с публикацией WO 03/01 1733 А1, в которой детально описан способ функционирования системы абсолютного положения. Термин «блок синхронизации» следует понимать в этом контексте в значении, в частности, электронного блока для обработки в основном цифровых электрических сигналов. Предпочтительно, блок оценки и блок синхронизации могут быть осуществлены одним целым, по меньшей мере, частично. Однако в принципе возможно также раздельное разделение этих блоков.
В преимущественном варианте осуществления блок оценки содержит по меньшей мере одну электронную схему, предназначенную для цели сравнения амплитуд аналоговых сигналов от по меньшей мере двух датчиков Холла и, в случае идентичных амплитуд, изменения по меньшей мере одного состояния цифрового переключения, вследствие чего распознавание согласования абсолютных положений по высоте блока датчиков и магнитного средства в лифтовой шахте в положении, которое характеризует этаж, точно рассчитано по времени, и упомянутое согласование может быть обработано в таком виде, который обеспечивает чрезвычайно простую дальнейшую обработку. Предпочтительно алгебраический знак одного из сигналов по меньшей мере от двух датчиков Холла может быть реверсирован (инвертирован) при помощи электронной схемы и сложен с сигналом от второго датчика Холла. Специалистам в данной области техники известны традиционные способы вычитания аналоговых сигналов при помощи электронных устройств. Вследствие этого, идентичные уровни сигнала от двух датчиков Холла могут быть предпочтительно преобразованы в уровень сигнала величины ноль, причем такой уровень сигнала может быть обнаружен простейшим образом. В частности, нулем дифференциального усиления сигналов от двух датчиков Холла в электронной схеме можно компенсировать амплитуду сигналов, которые находятся на различных уровнях вследствие различной чувствительности датчиков и/или вследствие различного большого наименьшего пространственного расстояния к магнитному средству, вследствие чего может быть повышена точность устройства определения положения этажа. Усиления, необходимые для компенсации амплитуд, могут быть определены во время пробного запуска кабины лифта.
Дополнительно предлагается, чтобы блок датчиков содержал по меньшей мере третий датчик Холла, и блок оценки предназначен для оценки по меньшей мере трех признаков положения этажа для генерирования сигнала этажа. При использовании третьего датчика Холла преимущественно возможно исключение ошибочных интерпретаций сигналов от двух других датчиков Холла, вследствие чего надежность устройства определения положения этажа повышается простым и экономичным способом. Предпочтительно третий датчик Холла может быть установлен в среднем положении относительно двух других датчиков Холла, так что любое согласование амплитуд сигналов от первых двух датчиков Холла с дополнительным условием, которое должно одновременно удовлетворяться, может быть объединено с минимальной амплитудой сигнала третьего датчика Холла с целью повышения надежности устройства определения положения этажа. Использование информации от системы абсолютного положения может дать преимущество для цели перемещения кабины лифта вблизи магнитного средства в положение, характеризующее этаж, для недопущения ошибочных интерпретаций сигналов от трех датчиков Холла в результате наличия нолей рассеяния и смежных силовых линий магнитного средства. Термин «вблизи» следует понимать в этом контексте, как положение с наименьшим пространственным расстоянием трех датчиков Холла относительно магнитного средства, причем пространственное расстояние соответствует среднему пространственному расстоянию двух лежащих по краям датчиков Холла.
В варианте осуществления, предложенном далее, блок оценки преимущество содержит по меньшей мере одну электронную схему компаратора, предназначенную для цели оцифровки аналогового сигнала от по меньшей мере одного из по меньшей мере трех датчиков Холла, вследствие чего условия сигналов от датчиков Холла могут быть оценены особенно просто в электронном виде. Предпочтительно минимальная величина положительной амплитуды сигнала от по меньшей мере одного из датчиков Холла может быть определена, как пороговая величина компаратора, а максимальное значение отрицательной амплитуды сигнала от по меньшей мере одного из датчиков Холла может быть определено как дальнейшая пороговая величина компаратора, вследствие чего перемещение по меньшей мере одного из датчиков Холла ближе к магнитному средству в положение, характеризующее этаж, преимущественно может быть определено особенно просто путем изменения уровня напряжения на выходе компаратора. Уровень напряжения на выходе компаратора может быть использован преимущественно для цели определения ситуаций близости блока датчиков к магнитному средству и для цели фильтрации в схеме совпадений любых ошибочных сигналов переключения, которые могут возникнуть от оценки других датчиков Холла. Электронная схема компаратора может быть выполнена в виде отдельных компараторов или как двухпорогового компаратора. Специалистам в данной области техники известны традиционные способы, используемые для этих целей.
Дополнительно предлагается, чтобы блок датчиков содержал по меньшей мере четвертый и пятый датчики Холла, и блок оценки предназначен для оценки по меньшей мере пяти признаков положения этажа для генерирования сигнала этажа. При использовании четвертого и пятого датчиков Холла возможно преимущественное исключение дальнейших возможных ошибочных интерпретаций сигналов от первого и от второго датчиков Холла, вследствие чего надежность устройства определения положения этажа в дальнейшем повышается простым и экономичным способом. Предпочтительно, четвертый и пятый датчики Холла расположены в каждом случае в положении снаружи ряда датчиков Холла, вследствие чего возможно предпочтительным способом по сигналам от этих датчиков сделать вывод о полярности магнитного поля, генерируемого магнитным средством в положении, характеризующем этаж.
В предпочтительном варианте осуществления блок синхронизации содержит средства для определения совпадения во времени скомбинированных и оцифрованных сигналов от датчиков Холла, вследствие чего точно распознается момент согласования абсолютных положений блока латников и магнитного средства в положении, характеризующем этаж, и могут быть надежно исключены простым и экономичным способом ошибочные интерпретации сигналов от датчиков Холла.
Предлагается, чтобы блок датчиков содержит по меньшей мере два магнитных средства, распределенных на одном этаже. При использовании двух магнитных средств в положениях, характеризующих этаж, возможно повышение надежности устройства определения положения этажа простым и экономичным способом. Преимущественно, тот факт, что блок датчиков распознает первое магнитное средство, может быть использован как указание на то, что кабина лифта находится вблизи этажа, вследствие чего сравнительно небольшая длина перемещения кабины лифта ко второму магнитному средству этажа может быть определена чрезвычайно точным образом путем использования сигналов от датчиков Холла, причем сигналы сгенерированы вторым магнитным средством.
В предпочтительном варианте осуществления устройство определения положении этажа содержит по меньшей мере второй блок датчиков, который функционирует независимо от первого блока датчиков для генерирования резервного сигнала этажа, так что достигается повышенная надежность относительно определения положения этажа простым и экономичным способом.
Лифтовая система, содержащая по меньшей мере одну кабину лифта и содержащая устройство определения положения этажа, где по меньшей мере первый блок датчиков расположен на кабине лифта, вследствие чего достигается чрезвычайно простое и экономичное решение вместе со сравнительно небольшими затратами на установку. Однако в принципе было бы возможным расположение, в котором магнитное средство установлено в положении, характеризующем кабину лифта, и по меньшей мере первый блок датчиков установлен в положении, характеризующем этаж.
Дальнейшие преимущества очевидны из последующего описания чертежей. Чертежи иллюстрируют примерные варианты осуществления изобретения.
Описания и пункты формулы изобретения включают комбинацию многочисленных признаков. Специалисты в данной области техники могут также рассматривать признаки по отдельности подходящим образом для целенаправленного создания дальнейших комбинаций. На чертежах:
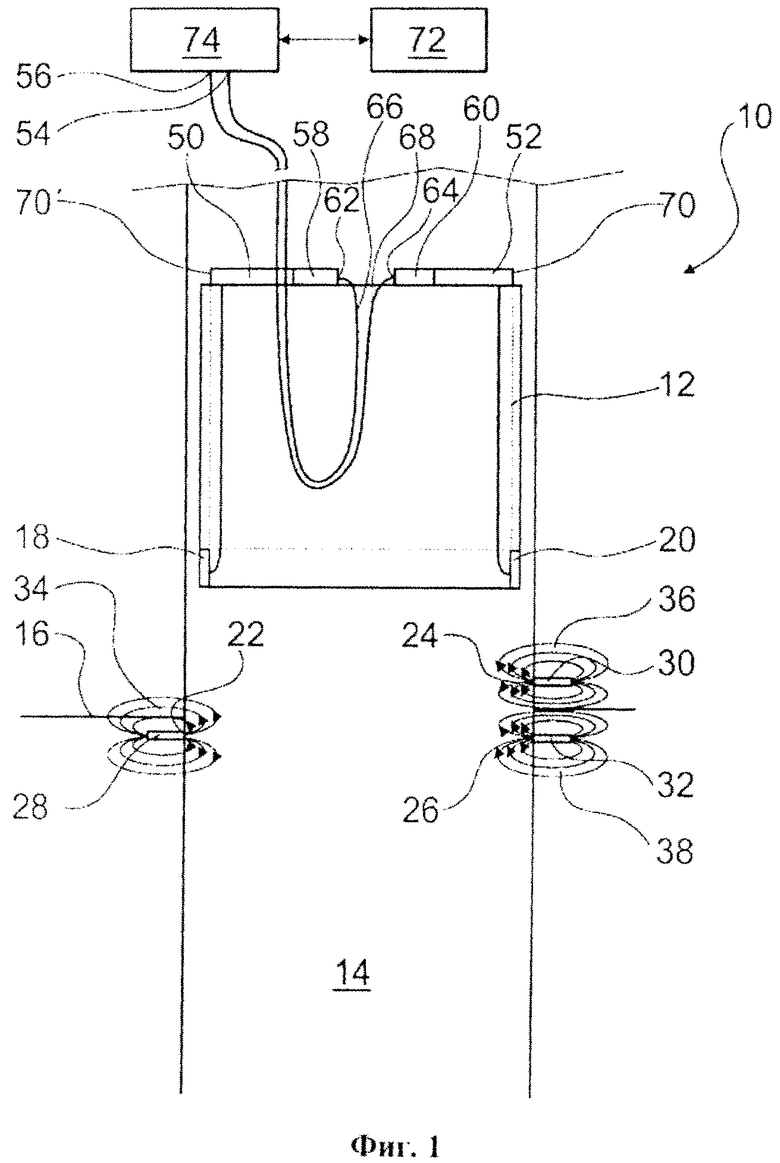
Фиг.1 показывает часть лифтовой системы с кабиной лифта в лифтовой шахте;
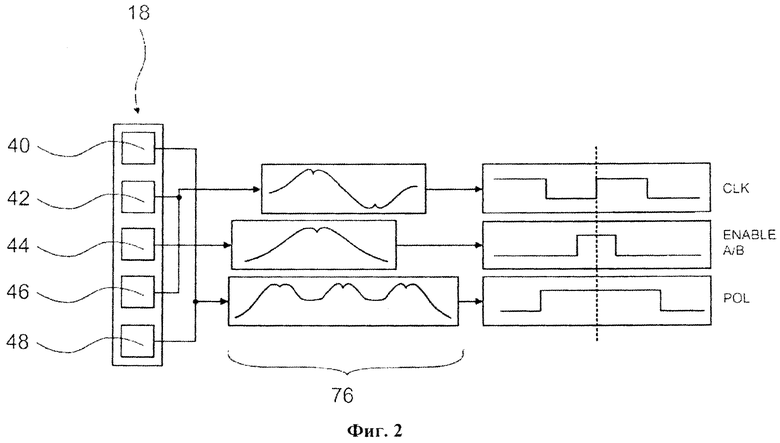
Фиг.2 показывает блок датчиков, содержащий пять датчиками Холла, и схематическую иллюстрацию процесса оценки их сигналов; и
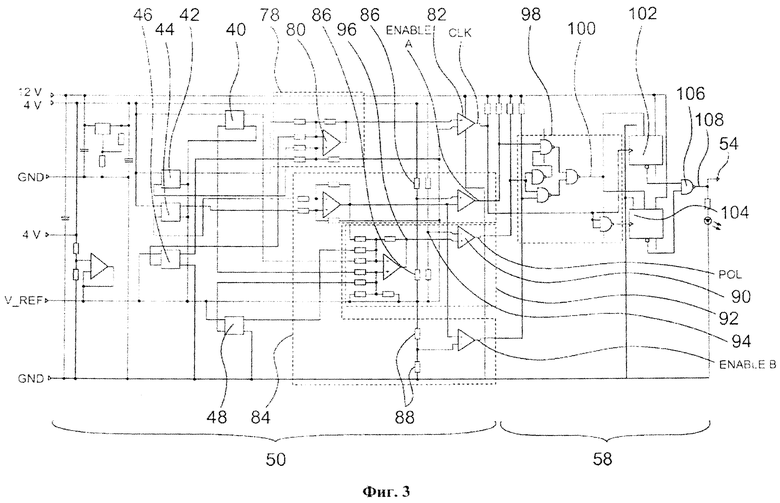
Фиг.3 показывает диаграмму электронной схемы блока оценки и блока синхронизации.
На фигуре 1 показана часть лифтовой системы 10 с кабиной 12 лифта, которая может перемещаться по лифтовой шахте 14. Два блока 18, 20 датчиков, работающих функционально независимо друг от друга, расположены в отдельных кожухах на одной из сторон кабины 12 лифта, которая находится вблизи этажа 16, чьи блоки датчиков предназначены для определения каждый раз признаков положения этажа с каждой стороны. Признак положения этажа распознается при помощи первого блока 18 датчиков благодаря тому, что магнитное средство 28 расположено в лифтовой шахте 14 в положении 22, характеризующем этаж 16, чье магнитное средство выполнено в виде постоянною магнита и чье магнитное поле 34 генерирует электрические сигналы в датчиках 40, 42, 44, 46, 48 Холла во время приближения первого блока 18 датчиков, который содержит пять датчиков 40, 42, 44, 46, 48 Холла. Для этой цели предусмотрено, что второй блок 20 датчиков проходит мимо двух магнитных средств 30, 32, чьи магнитные средства выполнены в каждом случае в виде постоянных магнитов и расположены в положениях 24, 26, характеризующих этаж 16, и генерируют в каждом случае магнитные поля 36 и 38. Каждый из блоков 18, 20 датчиков электрически связан с блоками 50, 52 оценки соответственно, причем блок оценки предназначен для цели оценки пяти признаков положения этажа в каждом случае блока 18, 20 датчиков с целью генерирования сигналов 54, 56 этажа.
Второй блок 20 датчиков, работающий независимо от первого блока 18 датчиков, использован из соображений безопасности для генерирования резервного сигнала 56 этажа.
Каждый из двух независимых блоков 50, 52 оценки электрически связан с блоком 58, 60 синхронизации и расположен в общем корпусе 70, 70'. Блоки 58, 60 синхронизации предназначены для целей генерирования сигналов 54, 56 этажа от электрических сигналов от соответствующих блоков 50, 52 оценки и для синхронизации показаний данных абсолютного положения от системы 72 абсолютного положения с сигналами 54, 56 этажа. С этой целью проведен сигнальный кабель 66, 68 в каждом случае от выхода 62, 64 блоков 58, 60 синхронизации к блоку 74 управления, подключенному к системе 72 абсолютного положения таким способом, который делает возможной передачу данных, причем система абсолютного положения здесь детально не описана, и ее детали не показаны на фигуре 1. Термин «блок управления» следует понимать в этом контексте, в частности, как устройство, содержащее арифметическо-логический блок, блок памяти и рабочую программу, хранящуюся в упомянутом блоке памяти. Термин «управление» следует понимать в этом контексте как целенаправленное приведение в действие в абсолютном процессе управления и/или также в процессе управления с обратной связью. Блок 74 управления предназначен для цели проверки сигналов 54, 56 этажа блоков 58, 60 синхронизации после их получения и в случае, если выполняются условия, хранимые в блоке 74 управления относительно согласования во времени двух сигналов 54, 56 этажа, для повторного считывания данных абсолютного положения системы 72 абсолютного положения и сохранения упомянутых данных в элементе памяти блока 74 управления.
Примерный вариант осуществления устройства определения положения этажа, показанный на фигуре 1, содержит из соображений резервирования два блока 18, 20 датчиков, работающих независимо друг от друга, независимые магнитные средства 28. а также 30 и 32, два независимых блока 50, 52 оценки и два независимых блока 58. 60 синхронизации, с целью генерирования сигналов 54, 56 этажа. В принципе, устройство определения положения этажа может, однако, также быть сконфигурировано с отдельным блоком 18 или 20 датчиков, одним магнитным средством 28 или 30 и 32, одним блоком 50 или 52 оценки и одним блоком 58 или 60 синхронизации для генерирования сигнала 54 или 56 этажа, что не нарушает замысел изобретения.
На фигуре 2 показан один из блоков 18 датчиков с фигуры 1 с пятью датчиками 40, 42, 44, 46 48 Холла и схематическая иллюстрация процесса оценки. Пять датчиков 40, 42, 44, 46, 48 Холла расположены по прямой вертикальной линии на постоянных пространственных расстояниях около 8 мм от середины датчика к середине датчика, так что, когда они проходят мимо магнитного средства 28 с фигуры 1 на наименьшем боковом пространственном расстоянии около 5 мм, они воспринимают один за другим магнитное поле 34, генерируемое магнитным средством 28, причем магнитное средство расположен в положении 22, характеризующем этаж 16.
Пять датчиков 40, 42, 44, 46, 48 Холла характеризуются в соответствии с последовательной оценкой их аналоговых сигналов 76 в блоке 50 оценки. Два датчика 42 и 46 Холла являются основными датчиками и расположены во втором и четвертом положениях блока 18 датчиков. Датчик 44 Холла описан как датчик разрешения и расположен по центру. Датчики 40 и 48 Холла размещены в крайних положениях в расположении датчиков 40, 42, 44, 46, 48 и вместе с датчиком 44 Холла характеризуются как датчики полярности.
В средней части на фигуре 2 показана схематическая иллюстрация аналоговых сигналов 76 от датчиков 40, 42, 44, 46, 48 Холла, причем сигналы скомбинированы для целей оценки, по мере того как упомянутые датчики Холла проходят мимо магнитного средства 28 с фигуры 1 в положении 22, характеризующем положение этажа 16. Аналоговые сигналы 76 от пяти датчиков 40, 42, 44, 46, 48 Холла обрабатываются в электронной схеме блока 50 оценки в соответствии со средней частью фигуры 3. В правой части фигуры 2 показаны цифровые сигналы CLK, ENABLE A, ENABLE В и POL, полученные от скомбинированных аналоговых сигналов 76 от пяти датчиков 40. 42, 44, 46, 48 Холла и подаваемые на блок 58 синхронизации, показанный в правой части фигуры 3. Ниже приведено объяснение того, как получают цифровые сигналы CLK, ENABLE A, ENABLE В и POL.
Блок 50 оценки на фигуре 3 содержит электронную схему 78, предназначенную с целью сравнения амплитуд аналоговых сигналов 76 от датчиков 42 и 46 Холла и на случай изменения состояния цифрового переключения идентичной амплитудой. Сигнал CLK формируется путем вычитания аналогового сигнала 76 от датчика 46 Холла из аналогового сигнала от датчика 42 Холла в операционном усилителе 80. Путем регулировки электрического сопротивления в цепи операционного усилителя 80 компенсируются обнаруженные во время пробного запуска разные чувствительности и разные минимальные пространственные расстояния между датчиками 42 и 46 Холла и магнитным средством 28. Вследствие этого, идентичная амплитуда на входах операционного усилителя 80 соответствует идентичным пространственным расстояниям датчиков 42 и 46 Холла от магнитного средства 28, которое расположено в положении 22, характеризующем этаж 16. Способы, необходимые для определения сопротивлений, известны специалистам в данной области техники. Переход через нуль разности в сигналах 76 от датчиков 42 и 46 Холла приводит к изменению выходного напряжения операционного усилителя 80. Состояние цифрового переключения следующего операционного усилителя 82, подключенного далее с целью генерирования сигнала CLK, изменяется с уровнем выходного напряжения операционного усилителя 80 относительно опорного напряжения V _REF.
Для генерирования цифровых сигналов ENABLE A и UNABLE В блок 50 оценки содержит электронную схему 84 компаратора, предназначенного для цели оцифровки аналогового сигнала 76 от датчика 44 Холла. При помощи резистивной схемы 86 операционного усилителя сигнал ENABLE А=«1» генерируется в том случае, если аналоговый сигнал 76 от датчика 44 Холла превышает положительную пороговую величину +60 мВ. При помощи резистивной схемы 88 еще одного операционного усилителя сигнал ENABLE В =«1» генерируется в том случае, если аналоговый сигнал 76 от датчика 44 Холла ниже отрицательной пороговой величины -60 мВ.
Еще один операционный усилитель 90 представляет еще одну схему 92 компаратора, в которой сравнивается опорное напряжение 94, установленное фиксированным, с амплитудой 96, скомбинированной от сигналов от датчиков 40, 44 и 48 Холла, и которая изменяет свой выход цифрового переключения в том случае, если скомбинированная амплитуда 96 превышает опорное напряжение 94 и/или меньше него. Выходное напряжение операционного усилителя 90 представляет цифровой сигнал POL.
Блок 58 синхронизации содержит логическую схему 98 из электронных логических модулей в качестве средства определения совпадения во времени между скомбинированными и оцифрованными сигналами от датчиков 40, 42, 44, 46, 48, т.е. цифровых сигналов CLK, ENABLE A, ENABLE В и POL. Выход 100 этой логической схемы 98 переключается на логическую «1» уровня напряжения в случае, если сигнал ENABLE A равен «1» и сигнал POL равен «0» либо если сигнал ENABLE'B равен «1» и сигнал POL равен «1». Это логическое условие гарантирует, что блок 50 оценки будет реагировать только в том случае, если блок 18 датчиков размещен поблизости от магнитного средства 28. Выход логической схемы 100 подается на входы сброса двух D-тригтеров 102, 104, которые реагируют на положительный передний фронт и тактовые входы которых управляются в каждом случае сигналом СЕК и/или инвертированным сигналом СЕК. Два инвертированных выхода данных D-триггеров оцениваются в логическом элементе 106 с логической НЕ-И, что соответствует условию ИЛИ для неинвертированных выходов данных. В случае идентичной амплитуды сигналов с датчиков 42 и 46 Холла и в случае выполнения логических условий для сигналов ENABLE A, ENABLE В и POL выход 108 логического элемента 106 с НЕ-И переключается в логическую «1» и генерирует сигнал 54 этажа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ЛИФТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2384511C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ УРОВНЯ ПОЛОЖЕНИЯ ЛИФТА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2184694C2 |
| СИСТЕМА ПИТАНИЯ ЛИФТА И ЗДАНИЯ С УПРАВЛЕНИЕМ ВТОРИЧНЫМ ИСТОЧНИКОМ ПИТАНИЯ | 2008 |
|
RU2490201C2 |
| Гидравлический лифт | 1990 |
|
SU1779235A3 |
| СИСТЕМА УПРАВЛЕНИЯ ДОСТУПОМ К ЛИФТУ | 2011 |
|
RU2564555C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЛИФТОМ | 2010 |
|
RU2499759C2 |
| Способ дистанционного контроля лифтов и устройство для его осуществления | 2016 |
|
RU2661256C2 |
| Способ автофазировки датчика углового положения ротора электродвигателя системы лифтового привода | 2020 |
|
RU2758200C1 |
| СИСТЕМА ЗАЩИТЫ ЛИФТА ОТ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2491224C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ЛИФТАМИ, СПОСОБ АНОНИМНОГО НАБЛЮДЕНИЯ ЗА ПАССАЖИРАМИ | 2006 |
|
RU2447008C2 |
Изобретение относится к устройству определения положения этажа лифтовой системы. Устройство определения положения этажа лифтовой системы, содержащее по меньшей мере первый блок датчиков, который содержит первый датчик Холла и предназначен для распознавания по меньшей мере одного признака положения этажа, и содержащее по меньшей мере один блок оценки. Причем блок оценки признака положения этажа служит для генерирования сигнала этажа, где блок датчиков содержит по меньшей мере второй датчик Холла. Блок оценки содержит по меньшей мере одну электронную схему, которая предназначена для сравнения амплитуд аналоговых сигналов от по меньшей мере двух датчиков Холла. В случае, если амплитуды сигналов идентичны, блок оценки измененяет, по меньшей мере, состояние одного цифрового переключения. Лифтовая система имеет по меньшей мере одну кабину лифта, содержащую устройство определения положения этажа, по меньшей мере первый блок датчиков размещен на кабине лифта. Способ определения положения этажа с устройством определения положения этажа состоит в том, что для генерирования сигнала этажа оценивают признаки положения этажа от по меньшей мере двух датчиков Холла. Достигается повышение надежности работы лифта. 3 н. и 8 з. п. ф-лы, 3 ил.
1. Устройство определения положения этажа лифтовой системы (10), содержащее по меньшей мере первый блок (18) датчиков, который содержит первый датчик (42) Холла и который предназначен для распознавания по меньшей мере одного признака положения этажа, и содержащее по меньшей мере один блок (50) оценки, который предназначен для цели оценки признака положения этажа для генерирования сигнала (54) этажа, где блок (18) датчиков содержит по меньшей мере второй датчик (46) Холла, и блок (50) оценки предназначен для цели оценки по меньшей мере двух признаков положения этажа для генерирования сигнала (54) этажа, отличающееся тем, что блок (50) оценки содержит по меньшей мере одну электронную схему (78), которая предназначена для цели сравнения амплитуд аналоговых сигналов (76) от по меньшей мере двух датчиков (42, 46) Холла и, в случае идентичной амплитуды, изменения, по меньшей мере, состояния одного цифрового переключения.
2. Устройство определения положения этажа по п.1, отличающееся системой (72) абсолютного положения и блоком (58) синхронизации, который предназначен для цели генерирования сигнала (54) этажа и для синхронизации показаний данных абсолютного положения системы (72) абсолютного положения с сигналом (54) этажа.
3. Устройство определения положения этажа по любому из предыдущих пунктов, отличающееся тем, что блок (18) датчиков содержит по меньшей мере третий датчик (44) Холла, и блок (50) оценки предназначен для цели оценки по меньшей мере трех признаков положения этажа для генерирования сигнала (54) этажа.
4. Устройство определения положения этажа по п.1 или 2, отличающееся тем, что блок (50) оценки содержит по меньшей мере одну электронную схему (84, 92) компаратора, которая предназначена для цели оцифровки аналогового сигнала (76) от по меньшей мере одного из по меньшей мере трех датчиков (42, 44, 46) Холла.
5. Устройство определения положения этажа по п.3, отличающееся тем, что блок (18) датчиков содержит по меньшей мере четвертый и пятый датчики (40, 48) Холла, и блок (50) оценки предназначен для цели оценки по меньшей мере пяти признаков положения этажа для генерирования сигнала (54) этажа.
6. Устройство определения положения этажа по п.3, отличающееся тем, что блок (58) синхронизации содержит средства для определения совпадения во времени скомбинированных и оцифрованных сигналов от датчиков (40, 42, 44, 46, 48) Холла.
7. Устройство определения положения этажа по п.1 или 2, отличающееся тем, что блок (20) датчиков содержит по меньшей мере два магнитных средства (30, 32), которые распределены на одном этаже (16).
8. Устройство определения положения этажа по п.1 или 2, отличающееся по меньшей мере вторым блоком (20) датчиков, который работает независимо от первого блока (18) датчиков для генерирования резервного сигнала (56) этажа.
9. Лифтовая система (10), содержащая по меньшей мере одну кабину (12) лифта и содержащая устройство определения положения этажа по одному из предыдущих пунктов, отличающаяся тем, что по меньшей мере первый блок (18) датчиков размещен на кабине (12) лифта.
10. Способ определения положения этажа с устройством определения положения этажа по любому из пп.1-8, отличающийся тем, что для генерирования сигнала (54) этажа оценивают признаки положения этажа от по меньшей мере двух датчиков (42, 46) Холла.
11. Способ по п.10, отличающийся тем, что сигнал (54, 56) этажа по меньшей мере инициирует абсолютное положение, заданное посредством системы (72) абсолютного положения, в блоке (74) управления.
| US 2004216320 A1, 04.11.2004; | |||
| Хлопкоуборочная машина | 1978 |
|
SU847953A1 |
| EA 201100081 A1, 31.10.2011 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ УРОВНЯ ПОЛОЖЕНИЯ ЛИФТА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2184694C2 |

