Изобретения относятся к области радиолокации, в частности, к радиолокационным средствам измерения параметров относительного движения космических аппаратов (КА) и могут быть использованы при стендовой отработке образца радиолокационной системы (РЛС) для:
1) построения модели отраженного сигнала и проведения моделирования с целью априорного определения качества работы выбранных алгоритмов оценки радиолокационного рельефа яркости (РРЯ), порожденного многоточечной целью;
2) синтеза основного оптимального алгоритма обработки принимаемого сигнала при работе РЛС;
3) построения тестового сигнала для оценки характеристик аппаратуры РЛС при формировании на входе приемного устройства сигналов, имитирующих отраженные сигналы от яркостного рельефа протяженной цели, имеющей различные характеристики;
4) оценки качества передачи РРЯ реальной аппаратурой РЛС и введения показателя качества (количественный признак) оценки точности воспроизведения радиолокационного рельефа пассивного космического объекта, позволяющего проводить содержательное сравнение как качества различных алгоритмов обработки, так и определять наиболее эффективные количественные характеристики параметров самих алгоритмов. Такое представление модели сигнала позволяет провести сравнение с другими алгоритмами по оценке работы алгоритмов на один и тот же входной сигнал для различных весовых функций. Причем в виде оценки качества можно взять вид отклика на модель входного сигнала по его виду или параметрам;
5) проведения указанных выше операций без оценки статистического распределения параметров множества мешающих отражений.
В известной литературе [1] стр. 147-243, [2] 233-250, [3] стр. 26-56, [4] стр. 81-108, [5] стр. 109-130 рассматриваются ПВ сигналы, отраженные от элементарных точечных рассеивателей, или, в крайнем случае, сигналы, попадающие во временной строб оценки амплитуды сигнала, отраженного от k-ой точки поверхности совместно с множеством других сигналов, отраженных от других точек, рассматриваемых как статистический ансамбль, и описываются характеристиками случайных процессов.
Построенные статистическими методами алгоритмы оценки верны, как это отмечают сами авторы [4], [5], в случае наблюдения объектов с однородной излучающей поверхностью, что существенно снижает эффективность таких алгоритмов при работе по стационарному неизвестному объекту.
Основными недостатками предлагаемых способов построения модели отраженного ПВ сигнала являются:
1) использование во всех случаях комплексной огибающей сигнала только от точечного отражателя;
2) неиспользование дополнительной информации о виде отраженных сигналов от точек, попадающих в строб анализа по задержке, при оценке амплитуды от k-ой точки отражения;
3) неучитывание очевидного факта, что комплексная огибающая отраженных сигналов формируется всеми сигналами, отраженными от различных точек поверхности, что приводит к приблизительности использования автокорреляционной модели при синтезировании фильтра обработки;
4) использование автокорреляционной модели (или функции неопределенности в этом случае) не позволяет достаточно убедительно проводить как сравнение различных алгоритмов обработки принимаемых сигналов (например, по критерию максимального разрешения при использовании одинаковых сигналов), так и определять наиболее оптимальные параметры (частота квантования, частота девиации, длительность импульса) самого алгоритма.
Наиболее близким к предлагаемому способу построения отраженных ПВ сигналов является способ формирования модели ПВ сигналов, приведенный в литературе [1] и [2], где канал формирования комплексного отклика на многоточечную цель можно реализовать в виде последовательного соединения канала согласованного приема и звена с передаточной корректирующей характеристикой, определяемой характеристикой помеховых сигналов. Недостатком такого способа формирования ПВ сигнала является тот факт, что выходной сигнал первого звена (с согласованного устройства) может быть существенно искажен.
В предлагаемом изобретении весовая функция для входного сигнала синтезируется в вычислительном устройстве (блоке формирования принимаемых ПВ сигналов), которая теоретически позволяет получить максимальное отношение с/ш по полезному сигналу и нулевой отклик по всем возможным сигналам переотражения.
Предлагаемый способ построения отраженных ПВ сигналов позволяет не только оптимизировать алгоритмы обработки в РЛС для любых видов переотражений, но и определить технические характеристики самих алгоритмов (частота излучения, частота девиации, частота квантования), а также провести моделирование с оценкой качества работы предлагаемого алгоритма.
Такое представление модели сигнала позволяет провести сравнение с другими алгоритмами по оценке работы алгоритмов на один и тот же входной сигнал для различных весовых функций. Причем в виде оценки качества можно взять вид отклика на модель входного сигнала по его виду или параметрам.
Техническим результатом предлагаемого изобретения является повышение точности измерения в условиях помех переотражения и, как следствие, снижение аварийности работы систем измерения параметров относительного движения КА.
Указанный технический результат достигается тем, что в предлагаемом способе формирования принимаемого пространственно-временного сигнала, отраженного от наблюдаемой многоточечной цели при работе радиолокационной системы, отраженные ПВ сигналы, отображающие по задержке произвольный рельеф радиолокационной яркости, формируют с помощью вычислительного устройства (ВУ) в виде матрицы комплексных чисел, каждая строка которой обозначает отсчеты ПВ сигнала, отраженного от одной точки и имеющего неизвестные амплитуду и начальную фазу, так, что все члены матрицы представляют собой различные комплексные числа, соответствующие наблюдаемым отраженным сигналам в пределах строба, равного длительности излучаемого сигнала, а передаваемый радиолокационной системе ПВ сигнал при этом представляют как сумму всех строк матрицы, относящихся к каждой наблюдаемой точке многоточечной цели, которая и определяет наблюдаемый радиолокационный рельеф. Далее передаваемый цифровой сигнал переносят на несущую частоту и излучают передающей антенной, принятый приемной антенной РЛС сигнал переводят в цифровую форму и обрабатывают в ВУ.
Для достижения названного технического результата предлагается стенд, имитирующий тестовые пространственно-временные сигналы, отраженные от наблюдаемой многоточечной цели, для отработки образца радиолокационной системы, который содержит вычислительное устройство (ВУ), выполненное с возможностью формирования матриц, строки которых представляют собой числовые комплексные векторы, имитирующие как полезный сигнал, так и все мешающие сигналы, складываемые как отсчеты комплексных чисел по всем столбцам матрицы, и представления полученной таким образом суммы в виде квадратурной цифровой последовательности.
Первый выход ВУ через цифро-аналоговый преобразователь (ЦАП) в виде двух аналоговых квадратурных составляющих соединен с первым входом квадратурного модулятора, выход которого соединен с входом усилителя, выход которого через передающую и приемную антенны по радиоканалу соединен с входом «модели отраженного ПВ сигнала» РЛС. Радиолокационная система содержит последовательно соединенные приемное устройство, вход «модели отраженного ПВ сигнала» которого соединен с одноименным входом РЛС, и аналого-цифровой преобразователь (АЦП), выход которого соединен с выходом РЛС и первым входом ВУ, второй выход которого является выходом стенда. Третий выход ВУ соединен с входом «управления режимом работы РЛС» радиолокационной системы, соединенным с одноименным входом приемного устройства. Стенд также содержит генератор ВЧ, выход которого соединен со вторым входом квадратурного модулятора и входом «немодулированного ВЧ сигнала» РЛС, соединенным с одноименным входом приемного устройства. Второй вход ВУ является входом стенда.
Вычислительное устройство содержит имитатор картины наблюдения, выход которого соединен с первым входом блока формирования различных излучаемых сигналов с параметрами fн, τимп, fдев, fкв, второй вход которого соединен со вторым входом ВУ, а выход соединен с первым выходом ВУ, а также блок формирования принимаемых ПВ сигналов, вход которого соединен с первым входом ВУ, а выход - со вторым выходом ВУ.
Предлагаемый способ построения модели ПВ сигнала учитывает основные мешающие сигналы в принимаемом сигнале РЛС, позволяет проводить синтез и анализ оптимальных алгоритмов работы РЛС, а также решает много других вопросов, связанных с многосигнальной ситуацией по смыслу задачи. Структура принимаемых сигналов в этом множестве априори известна и задается видом излучаемого сигнала по дальностной координате. Например, при излучении ЛЧМ-импульсного сигнала структура мешающих сигналов представляется как множество линейно-частотно модулированных сигналов, определяемых одними и теми же величинами длительности импульса и частотами девиации и квантования.
Модель излучаемого ЛЧМ сигнала: 
где α - амплитуда изучаемого сигнала,
ω0 - несущая частота сигнала,
FДЕВ - частота девиации,
τИМП - длительность импульса.
Эквивалентное комплексное представление имеет вид:
С учетом наличия в канале обработки приемника квадратурного детектора, а также с учетом использования цифровой обработки модель излучаемого сигнала может быть представлена вектором с комплексными координатами по месту квантования  где i=1,2 … n,
где i=1,2 … n,  - вектор в комплексном пространстве, z0i - координаты по осям (отсчеты).
- вектор в комплексном пространстве, z0i - координаты по осям (отсчеты).
Модель принимаемого сигнала может быть представлена в виде аддитивной смеси полезного сигнала, его отражений и шума:

В этом выражении первое слагаемое можно считать полезным сигналом, второе - помехой (мешающие сигналы), третье - шумом. Видно, что в общем случае принимаемый сигнал нельзя представлять сигналом, отраженным от одной точки, и помимо полезного сигнала на вход приемника поступают помехи и шумы. Известно, что согласованный фильтр является оптимальным приемником лишь в случаях, когда аддитивные помехи, типа белого шума, превалируют над мешающими отражениями. Если же уровень последних относительно велик, структуры оптимального сигнала и оптимального приемника будут более сложными и существенно зависят от конкретной обстановки. Необходимая априорная информация конкретной обстановки предполагает знание взаимного расположения полезных и мешающих отражателей по месту и времени, уровень и характер помех. Практический опыт и теоретические исследования, приведенные в существующей литературе, показывают, что все эти сигналы представляют линейную комбинацию, и оптимальный приемник может быть описан операцией интегрирования произведения приходящего сигнала и весовой функции, отличной от согласованной фильтрации (несогласованная фильтрация) [6].
В этом случае задача синтеза может быть решена как задача разрешения сигнала  , принимаемого в совокупности с га-другими сигналами, время прихода которых неизвестно. Для получения содержательного решения принимаемый сигнал представлен как пространственно-временной сигнал и может быть описан в виде матрицы
, принимаемого в совокупности с га-другими сигналами, время прихода которых неизвестно. Для получения содержательного решения принимаемый сигнал представлен как пространственно-временной сигнал и может быть описан в виде матрицы  , строки которой определяют полезный сигнал и все мешающие сигналы, попадающие во временной строб, определяемый длительностью излучаемого сигнала.
, строки которой определяют полезный сигнал и все мешающие сигналы, попадающие во временной строб, определяемый длительностью излучаемого сигнала.
В этом случае можно построить оптимальную опорную функцию (оптимальный фильтр), используя критерий получения максимума отклика фильтра на полезный сигнал при подавлении всех мешающих сигналов  .
.
В предлагаемом способе проквантованные по времени и амплитуде отраженные сигналы представляются в виде матрицы комплексных чисел. Строки такой матрицы являются разными сигналами, отраженными от различных точек наблюдаемого объекта и образующими на выходе РЛС рельефное изображение по задержке, которое должно соответствовать р/л яркостному рельефу наблюдаемого объекта.
Можно считать, что каждая такая строка является комплексным вектором в естественном базисе линейного пространства. Точная оценка амплитуды этого вектора невозможна без учета влияния всех сопутствующих сигналов, попадающих во временной строб длительности излучаемого импульса.
Предлагаемые изобретения иллюстрируются рисунками и чертежами, представленными на фигурах 1-5, на которых изображены:
на фиг. 1 - структура построения модели принимаемого ПВ сигнала:
а) - яркостной рельеф наблюдаемой картины;
б) - амплитуды точек изображения яркостного рельефа, соответствующего наблюдаемой картине;
в) - вид отраженного комплексного сигнала на выходе квадратурного модулятора;
на фиг. 2 - модель формирования матрицы принимаемого сигнала для различных дальностей сближаемых объектов;
на фиг. 3 - математическая модель отраженного сигнала от точки К;
на фиг. 4 - совокупность матриц для множества принимаемых сигналов;
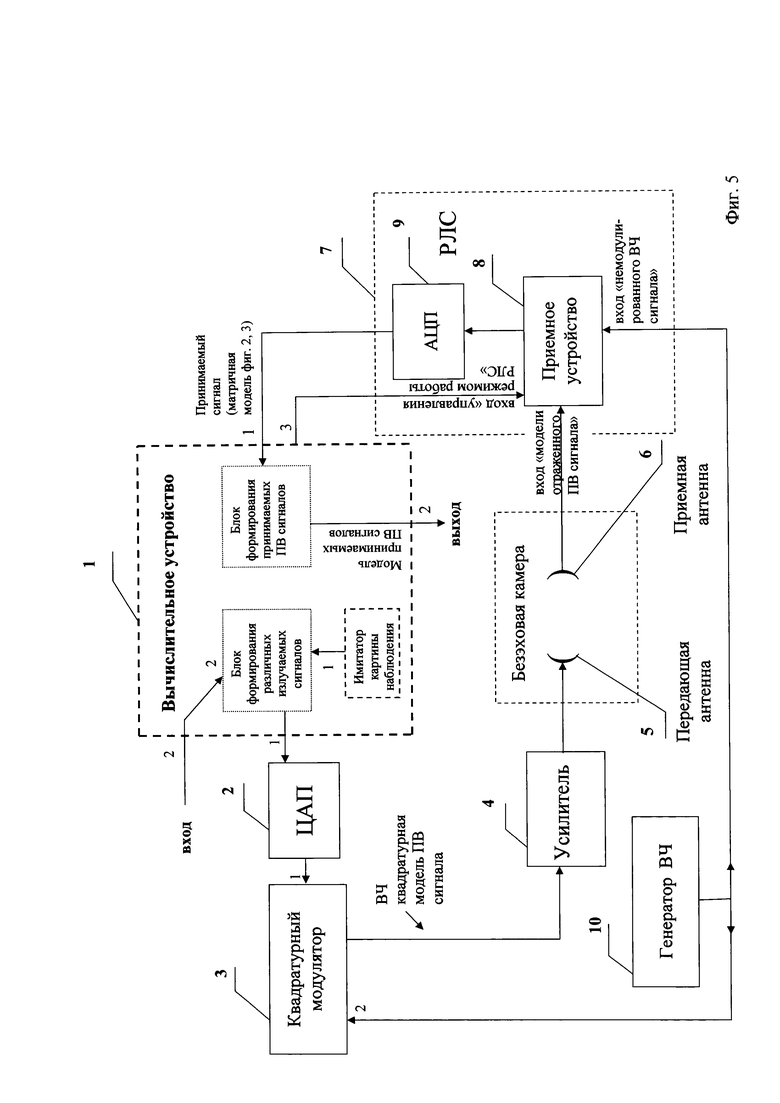
на фиг. 5 - структурная схема стенда.
Рассмотрим фиг. 1а). На определенных расстояниях расположены участки отражающей поверхности, имеющие различные эффективные площади рассеяния (ЭПР, размерность - м2); по горизонтальной оси показаны расстояния между этими участками (размерность - м).
На фиг. 1б) показаны амплитуды точек эталонного (сплошная линия) и произвольного (пунктирная линия) изображения (размерность - В), соответствующего наблюдаемой картине (фиг. 1а).
На фиг. 1в) представлен вид отраженного комплексного сигнала на выходе квадратурного модулятора. Для восстановления с наименьшей погрешностью наблюдаемого р/л рельефа яркости необходимо рассматривать матрицу сигналов, в которую входит помимо сигнала, для которого в данный момент оценивается амплитуда и фаза, еще n-е количество «урезанных» в пределах строба мешающих сигналов (вектора строки матрицы, расположенные вверху и внизу, - это сигналы, отраженные от точек, лежащих ближе и дальше по времени). И сигнал, отраженный от протяженной точечной цели, может быть представлен как последовательность таких матриц для каждой точки, описывающих всю протяженную цель (см. фиг. 2).
При неизвестности амплитуд и начальных фаз каждого из сигналов, отраженных от точек поверхности и попадающих в строб оценки амплитуды сигнала, отраженного от любой точки, можно видеть, что все эти матрицы по структуре одинаковы. Таким образом, для поиска оптимального фильтра достаточно рассмотреть только одну матрицу, которая определяется только структурой излучаемого сигнала.
На фиг. 3 и 4 представлена математическая модель отраженного сигнала от точки К поверхности, где n - количество отсчетов в принимаемом импульсном сигнале, αi - неизвестная амплитуда отраженного сигнала, является постоянной величиной для каждой фиксированной точки.
Предлагаемый способ осуществляют в следующей последовательности.
Сначала в вычислительном устройстве в блоке формирования различных излучаемых сигналов во временной области формируют излучаемый сигнал с заданными параметрами fн, τимп, fдев, fкв, в частности, сложный ЛЧМ сигнал (широкополосный с ограниченным спектром),  ; затем преобразуют в цифровой вид.
; затем преобразуют в цифровой вид.
Поскольку цель многоточечная, то в блоке формирования различных излучаемых сигналов формируют множество этих сигналов, сдвинутых по времени. Затем с помощью имитатора картины наблюдения сигналы модулируют по амплитуде и фазе. От каждой точки отражения имеем сигнал в виде множества матриц, которые складываются по вертикали для каждой точки (фиг. 3). Получаемый сигнал в виде последовательности чисел передают с выхода вычислительного устройства в ЦАП (фиг. 5), откуда аналоговый сигнал поступает на квадратурный модулятор, на выходе которого имеем высокочастотный сигнал с заданной амплитудой и фазой. Далее через усилитель, передающую и приемную антенны сигнал поступает на вход приемного устройства РЛС. Затем высокочастотный сигнал подают на АЦП, где он демодулируется и принимает цифровой вид. В этот сигнал уже входит шум приемного устройства. Далее цифровой сигнал поступает на вычислительное устройство в блок формирования принимаемых пространственно-временных сигналов, который выделяет сигнал, и на выходе которого получают модель принимаемых пространственно-временных сигналов, представляющих собой временную последовательность комплексных чисел, характеризующих достаточно точно амплитуды сигналов, отраженных от всех точек n, определяемых длительностью импульса и частотой квантования.
Предлагаемое устройство (стенд, имитирующий тестовые пространственно-временные сигналы, отраженные от наблюдаемой многоточечной цели, для отработки образца радиолокационной системы) содержит (фиг. 5) вычислительное устройство (1), первый выход которого через цифро-аналоговый преобразователь (2) в виде двух аналоговых квадратурных составляющих соединен с первым входом квадратурного модулятора (3), выход которого соединен с входом усилителя (4), выход которого через передающую (5) и приемную (6) антенны по радиоканалу соединен с входом «модели отраженного ПВ сигнала» радиолокационной системы (7). РЛС (7) содержит последовательно соединенные приемное устройство (8), вход «модели отраженного ПВ сигнала» которого соединен с одноименным входом РЛС (7), и аналого-цифровой преобразователь (9), выход которого соединен с выходом РЛС (7) и первым входом ВУ (1). Второй выход ВУ (1) является выходом стенда, третий выход ВУ (1) соединен с входом «управления режимом работы РЛС» радиолокационной системы (7), соединенным с одноименным входом приемного устройства (8). Стенд также содержит генератор ВЧ (10), выход которого соединен со вторым входом квадратурного модулятора (3) и входом «немодулированного ВЧ сигнала» РЛС (7), соединенным с одноименным входом приемного устройства (8). Второй вход ВУ (1) является входом стенда.
Вычислительное устройство (1) содержит имитатор картины наблюдения, выход которого соединен с первым входом блока формирования различных излучаемых сигналов, второй вход которого соединен со вторым входом ВУ (1), а выход соединен с первым выходом ВУ (1), а также блок формирования принимаемых пространственно-временных сигналов, вход которого соединен с первым входом ВУ (1), а выход - со вторым выходом ВУ (1).
Стенд работает следующим образом.
Тестовый цифровой сигнал, сформированный в вычислительном устройстве (1) (с помощью имитатора картины наблюдения и блока формирования различных излучаемых сигналов) в виде последовательности чисел, передают с выхода вычислительного устройства (1) в ЦАП (2), откуда аналоговый сигнал в виде двух аналоговых квадратурных составляющих поступает на вход квадратурного модулятора (3), на выходе которого получают сигнал с заданной амплитудой и фазой, который через усилитель (4), передающую (5) и приемную (6) антенны по радиоканалу поступает в приемное устройство (8) РЛС (7). Затем высокочастотный сигнал подают на АЦП (9), где он демодулируется и оцифровывается. Далее цифровой сигнал поступает в блок формирования принимаемых пространственно-временных сигналов вычислительного устройства (1), который выделяет сигнал, и на втором выходе ВУ (1) получают модель принимаемых пространственно-временных сигналов, представляющих собой временную последовательность комплексных чисел, характеризующих достаточно точно амплитуды сигналов, отраженных от всех точек n, определяемых длительностью импульса и частотой квантования.
Получение таких результатов стало возможным благодаря появлению высокоэффективной вычислительной техники, что позволило, в частности, при нахождении алгоритма обработки обойтись одной временной областью без перехода в частотную область.
Литература
1. Кук Ч., Бернфельд М. Радиолокационные сигналы. М: «Советское радио», 1971 г.
2. Фалькович С.Е., Пономарев В.И., Шкварко Ю.В. Оптимальный прием пространственно-временных сигналов в радиоканалах с рассеянием. М.: Радио и связь, 1989 г.
3. Кондратенков Г.С., Фролов А.Ю. Радиовидение. М.: Радиотехника, 2005.
4. Радиолокационные системы воздушной разведки, дешифрование радиолокационных изображений. Под ред. Школьного Л.А. Издание ВВИА им. проф. Н.Е. Жуковского, 2008 г.
5. Ian G.Gumming, Frank Н. Wong. Digital processing of Synthetic Aperture Radar Data. - 2005 Artech House Boston/London.
6. Ширман Я.Д., Манжос B.H. Теория и техника обработки радиолокационной информации на фоне помех. М: Радио и связь, 1981 г.
Группа изобретений относится к области радиолокации, в частности к радиолокационным (р/л) средствам измерения параметров относительного движения космических аппаратов (КА). Техническим результатом является повышение точности измерения в условиях помех переотражения и снижение аварийности работы систем измерения параметров относительного движения КА. Способ заключается в формировании матричной модели пространственно-временного сигнала, отраженного от элементов конструкции с неизвестными характеристиками р/л отражения. Такой сигнал может быть представлен в виде матрицы комплексных чисел, каждая строка которой представляет сигнал, отраженный от одной точки отражающей поверхности, так что оценки амплитуд сигналов от всех элементов наблюдаемого участка образуют р/л изображение получаемого рельефа. Стенд, имитирующий тестовые сигналы для отработки образца радиолокационной системы, содержит вычислительное устройство, формирующее матрицы, строки которых представляют собой числовые комплексные векторы, имитирующие как полезный сигнал, так и все мешающие сигналы, складываемые как отсчеты комплексных чисел по всем столбцам матрицы, и представляющее полученные таким образом суммы в виде квадратурной цифровой последовательности. 2 н. и 1 з.п. ф-лы, 5 ил.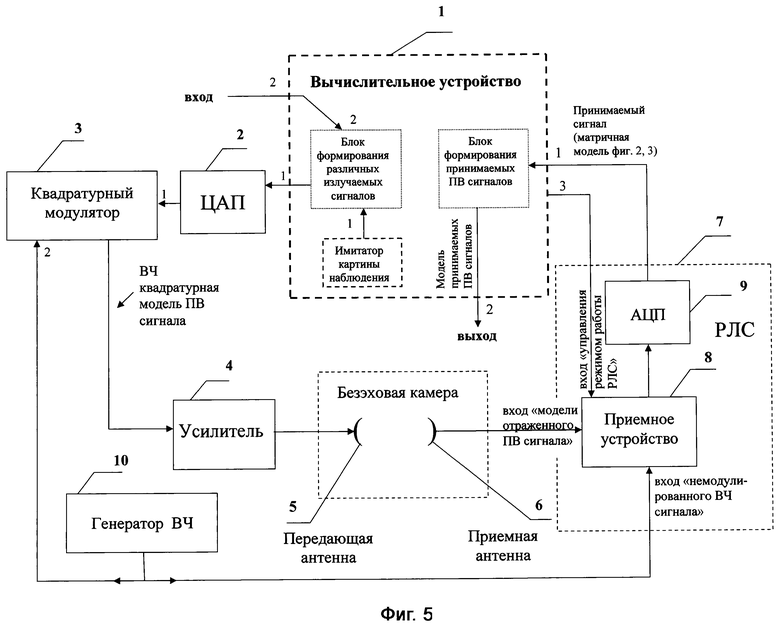
1. Способ формирования принимаемого пространственно-временного (ПВ) сигнала, отраженного от наблюдаемой многоточечной цели при работе радиолокационной системы (РЛС), заключающийся в том, что отраженные ПВ сигналы, отображающие по задержке произвольный рельеф радиолокационной яркости, формируют с помощью вычислительного устройства (ВУ) в виде матрицы комплексных чисел, каждая строка которой обозначает отсчеты ПВ сигнала, отраженного от одной точки и имеющего неизвестные амплитуду и начальную фазу, так, что все члены матрицы представляют собой различные комплексные числа, соответствующие наблюдаемым отраженным сигналам в пределах строба, равного длительности излучаемого сигнала, а передаваемый радиолокационной системе ПВ сигнал при этом представляют как сумму всех строк матрицы, относящихся к каждой наблюдаемой точке многоточечной цели, которая и определяет наблюдаемый радиолокационный рельеф, далее передаваемый цифровой сигнал переносят на несущую частоту и излучают передающей антенной, принятый приемной антенной РЛС сигнал переводят в цифровую форму и обрабатывают в ВУ.
2. Стенд, имитирующий тестовые пространственно-временные сигналы, отраженные от наблюдаемой многоточечной цели, для отработки образца радиолокационной системы (РЛС), содержащий вычислительное устройство (ВУ), выполненное с возможностью формирования матриц, строки которых представляют собой числовые комплексные векторы, имитирующие как полезный сигнал, так и все мешающие сигналы, складываемые как отсчеты комплексных чисел по всем столбцам матрицы, и представления полученной таким образом суммы в виде квадратурной цифровой последовательности, при этом первый выход ВУ через цифро-аналоговый преобразователь (ЦАП) в виде двух аналоговых квадратурных составляющих соединен с первым входом квадратурного модулятора, выход которого соединен с входом усилителя, выход которого через передающую и приемную антенны по радиоканалу соединен с входом «модели отраженного ПВ сигнала» РЛС, содержащей последовательно соединенные приемное устройство, вход «модели отраженного ПВ сигнала» которого соединен с одноименным входом РЛС, и аналого-цифровой преобразователь (АЦП), выход которого соединен с выходом РЛС и первым входом ВУ, второй выход которого является выходом стенда, третий выход ВУ соединен с входом «управления режимом работы РЛС» РЛС, соединенным с одноименным входом приемного устройства, а также генератор ВЧ, выход которого соединен со вторым входом квадратурного модулятора и входом «немодулированного ВЧ сигнала» РЛС, соединенным с одноименным входом приемного устройства, второй вход ВУ является входом стенда.
3. Стенд по п. 2, отличающийся тем, что вычислительное устройство (ВУ) содержит имитатор картины наблюдения, выход которого соединен с первым входом блока формирования различных излучаемых сигналов, второй вход которого соединен со вторым входом ВУ, а выход соединен с первым выходом ВУ, а также блок формирования принимаемых пространственно-временных сигналов, вход которого соединен с первым входом ВУ, а выход - со вторым выходом ВУ.
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТРАЖАТЕЛЬНЫХ ХАРАКТЕРИСТИК И КООРДИНАТ ЭЛЕМЕНТОВ ОБЪЕМА ПРОТЯЖЕННОГО ОБЪЕКТА ПРИ ЕГО СВЕРХШИРОКОПОЛОСНОМ ЗОНДИРОВАНИИ | 2011 |
|
RU2482510C1 |
| СИСТЕМА И СПОСОБ ТРЕХМЕРНОЙ ВИЗУАЛИЗАЦИИ ЯРКОСТНОЙ РАДИОЛОКАЦИОННОЙ КАРТЫ МЕСТНОСТИ | 2012 |
|
RU2513122C2 |
| СПОСОБ ФОРМИРОВАНИЯ ТРЕХМЕРНОГО ИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ И ВОЗДУШНОЙ ОБСТАНОВКИ С ПОМОЩЬЮ АНТЕННОЙ РЕШЕТКИ | 2013 |
|
RU2539558C1 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2009 |
|
RU2407034C9 |
| US 7688248 B2, 30.03.2010 | |||
| US 6563451 B1, 13.05.2003 | |||
| KR 20000017043 A, 25.03.2000 | |||
| ПИЛЬНОЕ УСТРОЙСТВО к МАШИНЕ ДЛЯ ПОВАЛА И ТРЕЛЕВКИ ДЕРЕВЬЕВ | 0 |
|
SU189247A1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ МИГРАЦИИ ЦЕЛЕЙ ПО ДАЛЬНОСТИ | 2017 |
|
RU2673679C1 |
| Передняя вилка мотоцикла | 1959 |
|
SU124820A1 |
| US 8704705 B2, 22.04.2014 | |||
| US 5892479 A, 06.04.1999. | |||

