Область техники
Настоящее изобретение относится к способу гашения колебания силовой передачи в транспортном средстве согласно ограничительной части по п. 1, к компьютерной программе для реализации способа согласно ограничительной части по п. 14 и к системе для гашения колебания силовой передачи согласно ограничительной части по п. 16.
Уровень техники
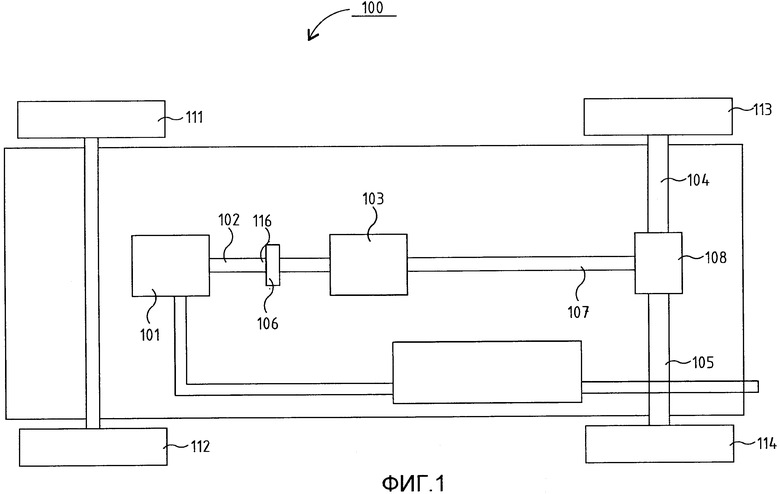
Фиг. 1 схематично изображает пример тяжелого транспортного средства 100, например грузовика, автобуса и т.п. Транспортное средство 100, схематично изображенное на фиг. 1, имеет пару передних колес 111, 112 и пару ведущих задних колес 113, 114. Оно также имеет силовую передачу с первичным движителем 101, который, например, может являться двигателем внутреннего сгорания, электродвигателем или их комбинацией, то есть так называемым гибридом. Первичный движитель 101, например, может быть соединен традиционным способом через выходной вал 102, ведущий от него к коробке 103 передач, возможно через муфту 106. Выходной вал 107 от коробки 103 передач приводит в движение ведущие колеса 113, 114 через редуктор 108, например традиционный дифференциал, и приводные валы 104, 105, которые соединены с упомянутым редуктором 108. Например, если первичный движитель 101 имеет вид электродвигателя, он также может быть соединен непосредственно с выходным валом 107 или приводными валами 104, 105.
Водитель транспортного средства, увеличивающий запрашиваемый крутящий момент для первичного движителя 101, например, посредством ввода через средства ввода, например, посредством нажатия педали акселератора, может вызвать относительно быстрое изменение крутящего момента в силовой передаче. Этому крутящему моменту сопротивляются ведущие колеса 113, 114 посредством их трения о землю и сопротивления перекатывания колес транспортного средства. Приводные валы 104, 105 таким образом подвержены относительно существенному моменту скручивания.
Среди прочего по соображениям стоимости и веса у приводных валов как правило не заданы размеры, чтобы справиться с этим существенным напряжением без влияния на них. Вследствие их относительной слабости приводные валы 104, 105 действуют вместо этого как пружины скручивания между ведущими колесами 103, 104 и редуктором 108.
Когда их сопротивление скручиванию больше не достаточно, чтобы сопротивляться крутящему моменту от силовой передачи, транспортное средство 100 начинает прокручиваться, после чего высвобождается сила пружинообразного скручивания в приводных валах 103, 104. Когда транспортное средство движется, эта высвобожденная сила может привести к колебаниям силовой передачи, заставляя транспортное средство качаться в продольном направлении, то есть в направлении его перемещения. Водитель транспортного средства, вероятно, сочтет это раскачивание очень неприятным. Он предпочтет мягкое и приятное впечатление от вождения, что также создает впечатление, что транспортное средство является качественным продуктом высокого технического уровня. Поэтому необходимо иметь возможность быстро обнаруживать и эффективно гасить такие колебания силовой передачи.
Предыдущие известные решения для гашения колебаний силовой передачи были технически сложны, что способствовало увеличенной вычислительной сложности и затратам реализации. Предыдущие известные сложные решения также привели к неэффективному гашению этих колебаний и, следовательно, к неудовлетворительным результатам, что касается гашения колебаний силовой передачи.
Краткое описание изобретения
Задача настоящего изобретения состоит в том, чтобы создать способ гашения колебаний силовой передачи. Эта задача достигается упомянутым выше способом согласно отличительной части пункта 1 формулы изобретения. Она также достигается посредством упомянутой выше компьютерной программы согласно отличительной части пункта 14 формулы изобретения. Она также достигается посредством упомянутой выше системы для гашения колебаний силовой передачи согласно отличительной части пункта 16 формулы изобретения.
В соответствии с настоящим изобретением эти колебания таким образом гасятся посредством использования изменения циклической вариации S скорости вращения первичного движителя. Запрашиваемый крутящий момент M, отправленный в первичный движитель транспортного средства, при этом изменяется посредством содействия к запрашиваемому крутящему моменту M, который оказывает гасящий эффект на колебания силовой передачи. Тот факт, что характер измененного запрашиваемого крутящего момента M определен на основе изменения циклической вариации S, означает, что колебания силовой передачи могут быть быстро погашены.
В соответствии с вариантом осуществления изобретения изменение циклической вариации S достигается посредством взятия производной от инвертированной версии наложенного изменения ωs скорости ω вращения первичного движителя. Производная дает в результате самую большую амплитуду измененного запрашиваемого крутящего момента M, когда инвертированная версия наложенного изменения ωs изменяется больше всего. Циклическая вариация запрашиваемого крутящего момента также в значительной степени инвертирована и смещена во времени от наложенных изменений скорости вращения первичного движителя. Общий результат состоит в том, что колебания силовой передачи быстро гасятся.
В соответствии с настоящим изобретением гашение колебаний силовой передачи использует только относящиеся к первичному движителю сигналы, которые уже используются при регулировании систем сегодняшних транспортных средств. Более определенно, изобретение использует скорость ω вращения первичного движителя. Это означает, что решение в соответствии с настоящим изобретением может быть реализовано с очень небольшой дополнительной сложностью и при вычислениях, и при фактической реализации.
Гашение колебаний силовой передачи основано на изменении циклической вариации S скорости ω вращения первичного движителя, что означает, что надежное гашение может быть произведено в значительной степени без задержек. В этом большое преимущество по сравнению с предыдущими известными системами, которые давали в результате ненадежное гашение с запозданием.
В соответствии с вариантом осуществления изобретения колебания силовой передачи обнаруживаются на основе изменения циклической вариации S таким образом, что колебание силовой передачи будет обнаружено, если заданное количество раз амплитуда изменения циклической вариации S поочередно будет выше положительного порогового значения Th1 и ниже отрицательного порогового значения Th2, и каждая пара последовательных восходящих/нисходящих пересечений порога происходит в пределах заданного периода T.
Общий результат настоящего изобретения состоит в очень эффективном обнаружении и гашении колебаний на основе анализа изменения циклической вариации S, достижимом с очень небольшой дополнительной сложности.
Краткое описание чертежей
Изобретение разъяснено более подробно ниже со ссылкой на приложенные чертежи, на которых аналогичные обозначения используются для аналогичных элементов. На чертежах:
фиг. 1 - транспортное средство;
фиг. 2a - графическая зависимость скорости вращения первичного движителя от времени;
фиг. 2b - графическая зависимость инвертированной версии наложенного циклического изменения скорости вращения первичного движителя от времени;
фиг. 2c - графическая зависимость производной инвертированной версии наложенного циклического изменения скорости вращения первичного движителя от времени;
фиг. 2d - графическая зависимость производной инвертированной версии наложенного циклического изменения скорости вращения первичного движителя от времени и пороговые значения;
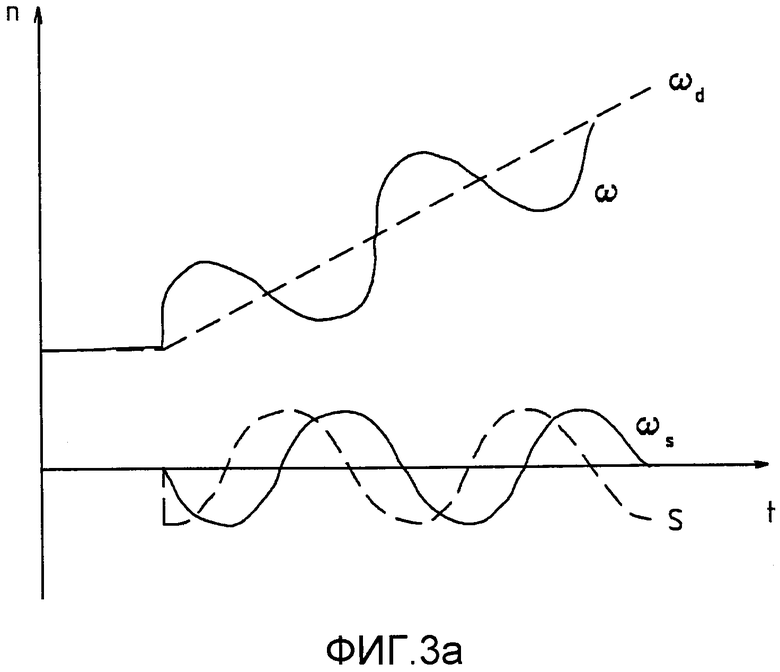
фиг. 3a - графическая зависимость гасящего колебание запрашиваемого крутящего момента от времени;
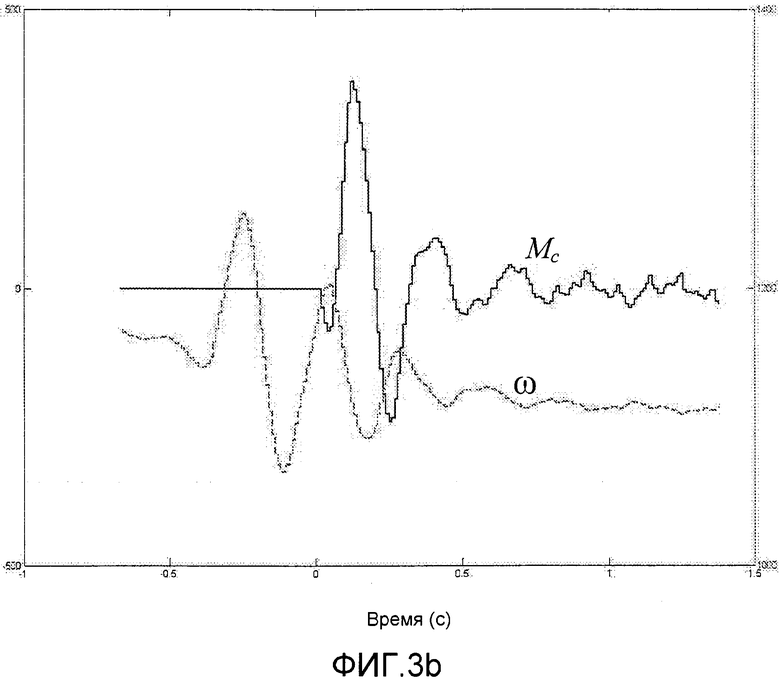
фиг. 3b - измеренное гашение колебания силовой передачи;
фиг. 4 - блок-схема последовательности операций для обнаружения и гашения колебания силовой передачи;
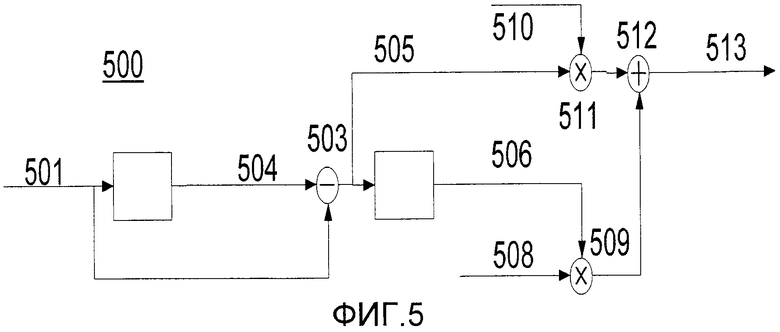
фиг. 5 - принципиальная схема для гашения колебания силовой передачи; и
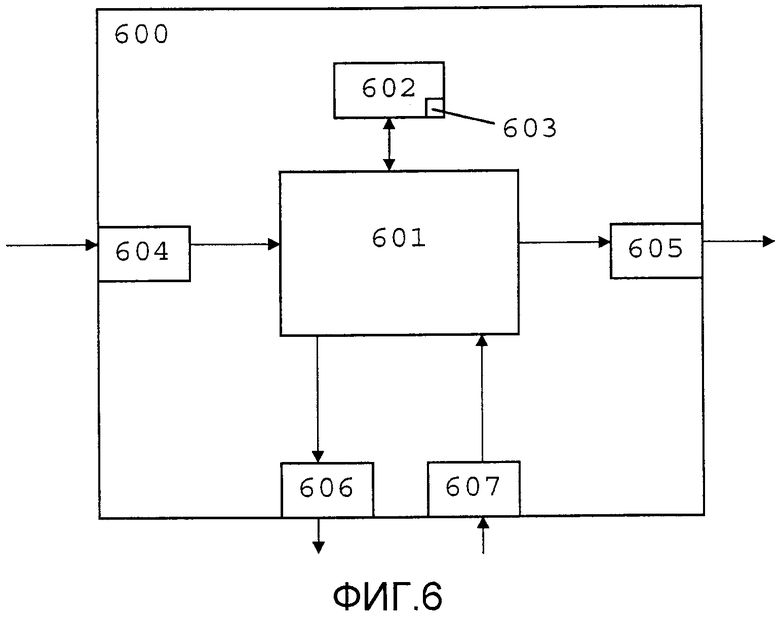
фиг. 6 - блок управления.
Описание предпочтительных вариантов осуществления изобретения
В соответствии с настоящим изобретением колебания силовой передачи могут быть обнаружены и погашены посредством анализа изменения циклической вариации S скорости ω вращения первичного движителя 101. Это включает в себя сначала определение этой циклической вариации S и затем анализ ее характера. Гашение колебания силовой передачи в соответствии с изобретением использует этот анализ изменения циклической вариации S посредством использования изменения циклической вариации S при получении гасящего колебания запрашиваемого крутящего момента M.
Транспортное средство 100 имеет первичный движитель 101, который сообщает крутящий момент. Сообщенный крутящий момент имеет отношение к запрашиваемому крутящему моменту M, который может являться прямым результатом ввода водителя, например, через педаль акселератора, или может быть востребован некоторой системой круиз-контроля или другим устройством, выполненным с возможностью требовать запрашиваемый крутящий момент от первичного движителя 101.
Обнаружение колебания силовой передачи может быть основано на изменении циклической вариации S. В соответствии с изобретением, если колебание силовой передачи обнаружено, первичному движителю передается запрашиваемый крутящий момент M с гасящей колебания характеристикой для противодействия колебаниям силовой передачи и их ослабления. Гасящая колебания характеристика здесь получается посредством использования изменения циклической вариации S. Обоснование гашения колебаний силовой передачи исключительно на скорости ω вращения первичного движителя имеет очень существенные преимущества относительно сложности реализации и эффективности гашения.
В соответствии с вариантом осуществления настоящего изобретения, это изменение циклической вариации S, умноженное по меньшей мере на один усиливающий коэффициент A1, прибавляется к первоначальному запрашиваемому крутящему моменту M0 для создания запрашиваемого крутящего момента M, который отправляют первичному движителю 101. При этом первоначальный запрашиваемый крутящий момент M0 основан на сигналах, например, от педали акселератора и/или круиз-контроля, как описано выше. По меньшей мере одному усиливающему коэффициенту A1 может быть задано любое подходящее значение, которое может быть постоянным или переменным, как описано более подробно ниже.
В соответствии с вариантом осуществления изобретения гашение колебания согласно изобретению производится только тогда, когда были обнаружены колебания силовой передачи. Это уменьшает сложность в системе в соответствии с изобретением.
В соответствии с вариантом осуществления изобретения считается, что имеется колебание силовой передачи, если амплитуда изменения циклической вариации, то есть амплитуда сигнала, имеющего отношение к изменению циклической вариации S, заданное количество раз поочередно оказывается выше положительного порогового значения Th1 и ниже отрицательного порогового значения Th2, и каждая пара последовательных восходящих и нисходящих пересечений порогов, то есть соответственно, выше этого положительного порогового значения Th1 и ниже этого отрицательного порогового значения Th2, имеет место в пределах заданного периода T. Таким образом, два последовательных восходящих и нисходящих пересечения порогов здесь разделены во времени не более чем на заданный период T.
Другими словами, считается, что имеются колебания силовой передачи, если в пределах заданного периода T со времени восходящего/нисходящего пересечения порога Th1, Th2 амплитуда изменения циклической вариации определенное количество раз оказывается ниже/выше другого порога Th1, Th2, которые имеют разные знаки. Таким образом, чтобы амплитуда изменения циклической вариации S чередовалась определенное количество раз, она будет иметь величину выше положительного порогового значения Th1 и величину ниже отрицательного порогового значения Th2 и сделает два последовательных пересечения порога в пределах заданного периода T.
Возможность с помощью этого варианта осуществления настоящего изобретения обнаружить колебания силовой передачи только на основе скорости ω вращения первичного движителя имеет большое преимущество в том, что эта скорость ω обычно доступна в любом случае в транспортном средстве. Предыдущие известные способы обнаружения колебания силовой передачи базировались также на дополнительных сигналах, например сигналах, имеющих отношение к скоростям колес, что приводит к обнаружению, которое включает в себя дополнительные датчики и большую сложность. Гашение колебаний силовой передачи также может быть основано исключительно на скорости ω вращения первичного движителя, и тем самым система гашения упрощается. Изменение циклической вариации S, произошедшее во время обнаружения, также может использоваться при гашении, таким образом посредством настоящего изобретения минимизируется вычислительная сложность.
Обнаружение колебаний силовой передачи в соответствии с изобретением иллюстрируется ниже со ссылкой на фиг. 2a-2d с использованием схематических и не ограничивающих примеров сигналов для разъяснения изобретения.
В соответствии с вариантом осуществления настоящего изобретения обнаружение основано на изменении циклической вариации S скорости ω вращения первичного движителя 101. Эта скорость ω вращения может быть определена посредством использования датчика 116, который может быть расположен близко к муфте 106, чтобы позволить ему обнаруживать скорость ω вращения, сообщаемую первичным движителем 101. Скорость ω вращения также может быть определена посредством использования модели, выполненной с возможностью облегчать достижение скорости ω вращения первичного движителя.
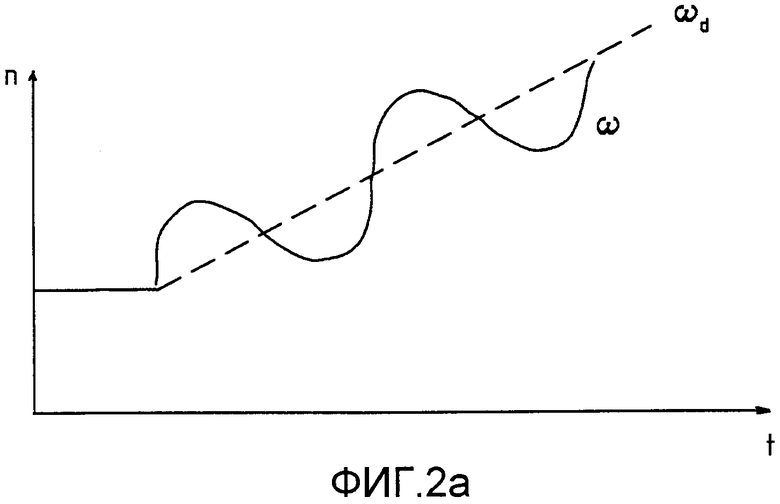
Когда возникает колебание силовой передачи, скорость ω вращения первичного движителя 101 может содержать наложенную циклическую вариацию. Фиг. 2a схематично изображает пример изменения требуемой скорости ωd вращения первичного движителя (прерывистая линия) относительно времени. Эта скорость ωd вращения в этом примере сначала равна первой скорости, например, 500 оборотов в минуту, после чего линейно увеличивается со временем. Фиг. 2a также изображает пример фактического характера скорости ω вращения (непрерывная линия), измеренной датчиком 116 или определенной некоторым другим способом, например, посредством модели для скорости ω вращения.
Фиг. 2a показывает скорость ω вращения первичного движителя, содержащую требуемую скорость ωd вращения и наложенную циклическую вариацию. Раскачивание в продольном направлении транспортного средства 100 имеет отношение к этой наложенной циклической вариации.
При обнаружении колебаний силовой передачи обычно доступ имеется не к требуемой скорости ωd вращения, а только к сигналу, соответствующему скорости ω вращения. В соответствии с вариантом осуществления настоящего изобретения требуемая скорость ωd вращения может быть достигнута посредством пропускания сигнала для скорости ω вращения через фильтр, более конкретно через низкочастотный (LP) фильтр. Когда низкочастотный фильтр выбран таким образом, что наложенные циклические вариации скорости ω вращения выше ее полосы пропускания, характер требуемой скорости ωd вращения таким образом может быть определен посредством этой низкочастотной фильтрации.
В соответствии с вариантом осуществления настоящего изобретения затем может быть получена инвертированная версия наложенной циклической вариации ωs скорости ω вращения посредством вычитания скорости ω вращения из требуемой скорости ωd вращения. Инвертированная версия наложенной циклической вариации, полученная в результате этого вычитания, схематично изображена на фиг. 2b. Поскольку скорость ω вращения была вычтена из требуемой скорости ωd вращения, инвертированная версия наложенной циклической вариации ωs располагается вокруг скорости 0 оборотов в минуту, то есть вокруг оси X на фиг. 2b. Поскольку скорость ω вращения была вычтена из требуемой скорости ωd вращения, инвертированная версия наложенной циклической вариации ωs также имеет характер, посредством которого форма волны инвертированной версии наложенной циклической вариации ωs в значительной степени инвертирована относительно формы волны циклической вариации скорости ω вращения.
Специалист в соответствующей области техники поймет, что упомянутое выше вычитание также может быть сделано, например, посредством сначала инвертирования, то есть изменения знака амплитуды сигнала для скорости ω вращения и затем добавления сигнала для требуемой скорости ωd вращения. Вычитание также может быть сделано, например, посредством вычитания сигнала для требуемой скорости ωd вращения из сигнала для скорости ω вращения и затем инвертирования, то есть изменения знака сигнала для результата этого вычитания.
В соответствии с другим вариантом осуществления настоящего изобретения инвертированная версия наложенной циклической вариации ωs альтернативно определяется посредством модели для нее. В соответствии с вариантом осуществления эта модель для определения инвертированной версии наложенной циклической вариации ωs принимает форму "модели с двумя массами", содержащей две колебательные массы со слабым звеном между ними. Две колебательные массы смоделированы таким образом, что первая представляет первичный движитель 101, и вторая представляет колеса 111, 112, 113, 114 и окружение транспортного средства. Каждая из первой и второй колебательных масс согласно модели имеет соответствующий вес и вращается с соответствующей скоростью. На первую и вторую колебательные массы соответственно действуют первый и второй крутящие моменты, первый крутящий момент сообщается крутящим моментом первичного движителя, компенсируемым посредством сцепления, и второй крутящий момент является крутящим моментом, посредством которого окружение действует на транспортное средство. Слабое звено между этими колебательными массами моделируется как демпфированная пружина.
В целом эта модель имеет три состояния, первое состояние представляет скорость ω вращения первичного движителя, второе состояние представляет скорость вращения колес, и третье состояние представляет угловую разность между ними, то есть поворот приводных валов. С помощью этой модели возможно получить скорость ω вращения и упругий поворот и определить на их основе инвертированную версию наложенной циклической вариации ωs.
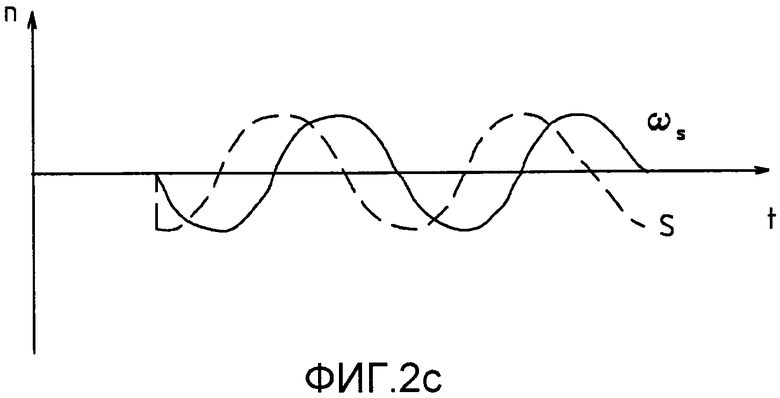
Как упомянуто выше, колебания силовой передачи могут быть обнаружены посредством анализа изменения циклической вариации S скорости ω вращения первичного движителя 101. Чтобы получить изменения циклической вариации S для скорости ω вращения на основе инвертированной версии наложенной циклической вариации ωs, последняя берется как производная по времени в соответствии с вариантом осуществления настоящего изобретения. Инвертированная версия наложенной циклической вариации ωs (непрерывная линия) и ее производная, то есть изменение циклической вариации S для скорости ω вращения (прерывистая линия), схематично изображены на фиг. 2c. Когда изменение циклической вариации S принимает форму производной инвертированной версии наложенной циклической вариации ωs, оно представляет изменение инвертированной версии наложенной циклической вариации ωs во времени.
Анализ изменения циклической вариации S включает в себя использование по меньшей мере двух порогов, имеющих отношение к его амплитуде. В соответствии с изобретением, считается, что имеется колебание силовой передачи, если заданное количество раз амплитуда изменения циклической вариации поочередно становится выше/ниже (то есть пересекает) двух соответствующих положительного и отрицательного пороговых значений Th1, Th2, и если заданное количество раз каждое из двух последовательных восходящего/нисходящего пересечений порогов происходит в пределах заданного периода T друг от друга. Таким образом, чтобы колебание силовой передачи считалось обнаруженным, все последовательные пересечения могут быть разделены во времени не более чем на заданный период T.
Подходящие пороговые значения Th1, Th2 могут быть получены опытным путем, то есть посредством тестов, или смоделированы. Подходящие продолжительности заданного периода T также могут быть получены опытным путем, то есть посредством тестов, или смоделированы. Продолжительность заданного периода T и/или пороговые значения Th1, Th2 зависят от частоты инвертированных наложенных циклических вариаций ωs и/или уровня шума датчиков в системе. В общих чертах, выбранные пороговые значения Th1, Th2 и/или период T должны быть такими, чтобы избегать неправильного обнаружения колебаний силовой передачи вследствие неустойчивых сигналов и т.д.
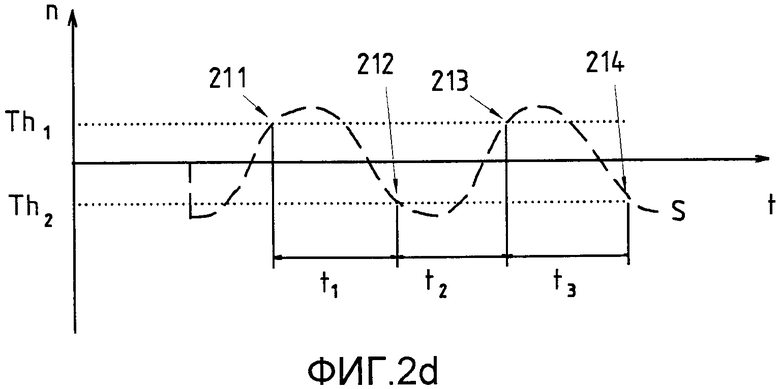
Фиг. 2d изображает изменение циклической вариации S (прерывистая линия) относительно времени и два порога Th1, Th2, то есть первый порог с положительным значением Th1 и второй порог с отрицательным значением Th1, Th2. В соответствии с настоящим изобретением колебание силовой передачи считается обнаруженным, если заданное количество раз изменение циклической вариации S с чередованием знаков оказывается выше/ниже этих порогов Th1, Th2, и если все последовательные восходящие/нисходящие пересечения 211/212, 212/213 и 213/214 порогов происходят в пределах заданного периода T от соответствующих последних восходящих/нисходящих пересечений 211, 212 и 213.
Как можно видеть в примере на фиг. 2d, изменение циклической вариации S первоначально в момент 211 имеет положительную амплитуду больше первого порогового значения Th1 в начале первого периода t1. Во второй момент 212, такой что первый период t1 короче заданного периода T, то есть t1<T, изменение циклической вариации S имеет амплитуду ниже второго порогового значения Th2. В третий момент 213, который здесь имеет место в пределах периода t2, который длится от предыдущего нисходящего пересечения в момент 212 и короче заданного периода T, то есть t2<T, изменение циклической вариации S имеет положительную амплитуду, которая снова больше первого порогового значения Th1.
В примере, описанном выше со ссылкой на фиг. 2d, количество восходящих/нисходящих пересечений порога для обнаружения задано равным трем, и когда амплитуда в третий раз в момент 213 становится выше/ниже порогового значения Th1, Th2, выше/ниже которого была амплитуда изменения циклической вариации S, и когда пороговые значения с чередующимися знаками, то есть амплитуда соответственно была выше и ниже положительного первого порогового значения Th1 и отрицательного второго порогового значения Th2, и период t1, t2, который прошел между всеми последовательными восходящими/нисходящими пересечениями порогов, находится в пределах заданного периода T, в соответствии с настоящим изобретением считается, что обнаружено колебание силовой передачи.
Обнаружение, описанное выше со ссылкой на фиг. 2a-2d, безусловно может быть модифицировано в пределах объема независимых заявлений. Например, количество восходящих/нисходящих пересечений порогов Th1, Th2 может представлять собой любое соответствующее число. Таким образом, обнаружение может иметь место при одном или более восходящих/нисходящих пересечений порогов Th1, Th2. Как описано выше со ссылкой на фиг. 2d, обнаружение может иметь место, например, при трех восходящих/нисходящих пересечениях с чередованием знаков. Однако количество восходящих/нисходящих пересечений порогов Th1, Th2 для обнаружения колебания силовой передачи также может быть определено, например, равным четырем, и в этом случае, чтобы имело место обнаружение, период между восходящим пересечением в третий момент 213 и нисходящим пересечением в четвертый момент 214, когда отрицательное второе пороговое значение Th2 снова пересекается, аналогичным образом не может быть больше заданного периода T.
Последовательность восходящих/нисходящих пересечений порога также может быть изменена таким образом, чтобы первое пересечение порога имело место в направлении вниз, то есть амплитуда изменения циклической вариации S становится ниже отрицательного второго порогового значения Th2.
Обычно надежность обнаружения увеличивается посредством увеличения заданного количества восходящих/нисходящих пересечений порога. Однако их увеличение означает, что обнаружение несколько задерживается. Таким образом, система может быть откалибрована по-разному для разных применений и удовлетворять разным требованиям относительно надежности и задержки обнаружения.
Гашение колебаний силовой передачи в соответствии с изобретением на основе изменения циклической вариации S проиллюстрировано ниже с использованием схематических и не ограничивающих примеров сигналов для разъяснения изобретения.
Фиг. 3a схематично изображает пример зависимости требуемой скорости ωd вращения первичного движителя (прерывистая линия) от времени и пример скорости ω вращения первичного движителя (непрерывная линия). Она также изображает инвертированную версию наложенной циклической вариации ωs (непрерывная линия) и изменение циклической вариации S (прерывистая линия), которая получена посредством взятия производной от инвертированной версии наложенной циклической вариации ωs.
Как ясно показывает фиг. 3a, изменение циклической вариации S смещено по времени от инвертированной наложенной циклической вариации ωs. Тот факт, что изменение циклической вариации S получено посредством взятия производной от инвертированной наложенной циклической вариации ωs, означает также, что изменение циклической вариации S является самым большим, то есть имеет самые большие положительные и отрицательные амплитуды, когда скорость ω вращения соответственно увеличивается и уменьшается больше всего. Изменение циклической вариации S таким образом достигает самой большой амплитуды, когда скорость ω вращения изменяется больше всего.
Другими словами, изменение циклической вариации S для инвертированной наложенной циклической вариации ωs будет находиться в значительной степени в противофазе по отношению к соответствующему изменению циклической вариации скорости ω вращения, то есть будет в противофазе по отношению к соответствующей производной от этой скорости. Это может быть также быть выражено как изменение циклической вариации S для инвертированной наложенной циклической вариации ωs, которая в значительной степени инвертирована относительно соответствующего изменения циклической вариации для скорости ω вращения. Изменение циклической вариации S находится при этом в значительной степени в противофазе, то есть является в значительной степени инвертированным относительно соответствующего изменения циклической вариации (производной по времени) для скорости ω вращения, поскольку скорость ω вращения в соответствии с изобретением вычтена из требуемой скорости вращения ωd при получении изменения циклической вариации S.
Эффект от этого, когда изменение циклической вариации S затем используется для создания гасящего колебания запрашиваемого крутящего момента M для первичного движителя 101 транспортного средства 100, состоит в том, что гасящий колебания запрашиваемый крутящий момент M предполагает относительно наименьшее значение, когда скорость ω вращения увеличивается больше всего. Это означает, что колебания силовой передачи могут быть погашены очень эффективно посредством применения настоящего изобретения.
Фиг. 3b изображает измеренные данные из транспортного средства, когда активирован способ гашения колебаний силовой передачи в соответствии с изобретением. Непрерывная линия представляет здесь содействующий крутящий момент Mc из настоящего изобретения, то есть сигнал 513 на фиг. 5. Прерывистая линия представляет скорость ω вращения первичного движителя. Измеренные данные показывают, что гашение колебаний в соответствии с изобретением активируется, когда обнаружены колебания силовой передачи, то есть когда изменение циклической вариации S пересекло пороги с чередованием знаков определенное количество раз, и последовательные пересечения порогов разделены во времени не более чем на заданный период T. Схема показывает, что содействующий крутящий момент Mc из способа в соответствии с изобретением основан на производной от наложенной циклической вариации ωs и таким образом смещен по времени по направлению к скорости ω вращения таким образом, что форма волны содействующего крутящего момента Mc в значительной степени инвертирована и усилена относительно изменения циклической вариации (производной) скорости ω вращения, после чего колебания могут быть эффективно погашены.
Фиг. 4 является блок-схемой последовательности операций для способа в соответствии с изобретением. На первом этапе 401 способ начинается. На втором этапе 402 определяется изменение циклической вариации S скорости ω вращения первичного движителя 101.
На третьем этапе 403 способа создается гасящий колебания запрашиваемый крутящий момент M. Этому запрашиваемому крутящему моменту M дается гасящая колебания характеристика посредством использования изменения циклической вариации S, определенного на втором этапе 402 способа.
В соответствии с вариантом осуществления изобретения способ также содержит дополнительный этап после второго этапа 402 и перед третьим этапом 403. На этом дополнительном этапе колебание силовой передачи обнаруживается на основе изменения циклической вариации S. В соответствии с вариантом осуществления изобретения колебание силовой передачи считается обнаруженным, если амплитуда изменения циклической вариации S заданное количество раз поочередно оказывается выше положительного порогового значения Th1 и ниже отрицательного порогового значения Th2, и каждая пара последовательных восходящих/нисходящих пересечений порогов имеет место в пределах заданного периода T.
Настоящее изобретение также имеет отношение к системе для гашения колебания силовой передачи на транспортном средстве 100, снабженном первичным движителем 101, который вращается со скоростью ω, также называемой скоростью ω вращения или скоростью ω вращения первичного движителя. Система содержит блок определения и блок крутящего момента. Блок определения выполнен с возможностью определять характер изменения циклической вариации S скорости ω вращения. Блок крутящего момента, который запрашивает крутящий момент от первичного движителя 101, выполнен с возможностью использовать изменение циклической вариации S, чтобы задать этому запрашиваемому крутящему моменту M гасящую колебания характеристику, как описано выше относительно способа в соответствии с изобретением.
В соответствии с настоящим изобретением система содержит также блок обнаружения, выполненный с возможностью обнаруживать, имеется ли колебание силовой передачи. В соответствии с вариантом осуществления системы для изобретения блок обнаружения выполнен с возможностью полагать, что имеется колебание силовой передачи, если изменение циклической вариации S имеет амплитуду, которая заданное количество раз поочередно оказывается выше положительного порогового значения Th1 и ниже отрицательного порогового значения Th2, и если все пары последовательных восходящих/нисходящих пересечений порогов имеет место в пределах заданного периода T, как описано выше относительно способа в соответствии с изобретением.
Фиг. 5 является принципиальной схемой 500 для возможной реализации гашения в соответствии с изобретением. Скорость ω вращения первичного движителя, которая может быть измерена, например, датчиком 116, передается на фильтр 502 и блок 503 вычитания посредством соединения с ними в виде входного сигнала 501.
Как описано выше, требуемая скорость ωd вращения достигается посредством сигнала, представляющего скорость ω вращения, отфильтрованного фильтром 502. Требуемая скорость ωd вращения, таким образом, служит в качестве выходного сигнала 504 из фильтра 502 и может рассматриваться как по меньшей мере полустатический компонент скорости ω вращения.
В блоке 503 вычитания скорость ω вращения вычитается из требуемой скорости ωd вращения, и инвертированная наложенная циклическая вариация ωs извлекается как выходной сигнал 505 из блока 503 вычитания.
Как упомянуто выше, колебания силовой передачи могут быть обнаружены посредством анализа изменения циклической вариации S скорости ω 501 вращения первичного движителя 101. Это изменение циклической вариации S получено как выходной сигнал 506 из блока 507 взятия производной, в котором берется производная по времени от инвертированной наложенной циклической вариации ωs.
Изменение циклической вариации S затем умножается на усиливающий коэффициент A1 в умножителе 509, усиливающий коэффициент A1 служит в нем в качестве входного сигнала 508 и добавляется в сумматоре 512 к усиленной версии инвертированной наложенной циклической вариации ωs, последняя была усилена посредством усиливающего коэффициента A2 в умножителе 511, в котором усиливающий коэффициент A2 служит в качестве входного сигнала 510. Усиливающие коэффициенты A1, A2 могут быть постоянными и/или переменными.
Выходной сигнал 513 от сумматора 512 сообщает содействующий крутящий момент Mc запрашиваемому крутящему моменту M для первичного движителя 101. Посредством изобретения этот содействующий крутящий момент Mc обеспечивается гасящей колебания характеристикой, которая может использоваться для гашения колебаний силовой передачи, когда этот содействующий крутящий момент Mc добавляется к первоначальному запрашиваемому крутящему моменту M0, который основан, например, на сигналах от педали акселератора и/или круиз-контроля, как описано выше.
Постоянные величины для одного или более усиливающих коэффициентов A1, A2 могут быть получены опытным путем и откалиброваны в транспортном средстве посредством эксперимента.
В соответствии с вариантом осуществления один или более этих усиливающих коэффициентов A1, A2 принимают вид стандартизированных значений с величинами, подходящими для предотвращения слишком больших значений выходного сигнала 513, то есть для содействующего крутящего момента Mc. Это может быть сделано, например, посредством стандартизации усиливающих коэффициентов A1, A2 посредством максимального допустимого значения X для выходного сигнала 513.
Если выходной сигнал 513, получающийся в результате сложения 505*510+506*508, имеет значение, которое больше максимального допустимого значения X, эта стандартизация, например, может быть сделана следующим образом:
508'=508*(X/(505*510+506*508))
510'=510*(X/(505*510+506*508))
где 508' и 510' - соответствующие стандартизированные входные сигналы, имеющие отношение к стандартизированным усиливающим коэффициентам A1' и A2'. Значения для стандартизированных входных сигналов 508' и 510' могут быть определены во время или после обнаружения колебаний силовой передачи, поскольку выходные сигналы 505, 506 уже доступны во время обнаружения. Если стандартизированные входные сигналы 508' и 510' определяются во время фазы обнаружения, то есть прежде чем будет извлечен выходной сигнал 513, они могут быть стандартизированы по направлению к самому большому мыслимому значению, которое имел бы выходной сигнал 513, если бы было активировано гашение колебаний силовой передачи.
Если выходные сигналы 513 имеют значение, которое не больше максимального допустимого значения X, используются не стандартизированные входные сигналы 508 и 510, которые имеют соответствующие не стандартизированные усиливающие коэффициенты A1 и A2.
Как описано выше, специалист в соответствующей области техники поймет, что вычитание скорости ω вращения первичного движителя из требуемой скорости ωd вращения первичного движителя для получения инвертированной наложенной циклической вариации ωs также может быть сделано другими способами, отличающимися от определенного посредством блока 503 вычитания. Например, инвертор может использоваться в комбинации с сумматором для выполнения той же самой функции. При этом важно то, что содействующему крутящему моменту задается такая гасящая колебания характеристика, что ее характер изменения в значительной степени инвертирован и смещен во времени относительно наложенных циклических вариаций скорости ω вращения первичного движителя, и, как поймет специалист в соответствующей области техники, это может быть сделано разнообразными способами.
Фиг. 6 изображает блок управления в соответствии с настоящим изобретением. Ради простоты показан только один блок 600 управления, но транспортные средства рассматриваемого здесь типа часто имеют относительно большое количество блоков управления, например, для управления первичным движителем, коробкой передач и т.д., как хорошо известно специалисту в соответствующей области техники.
Таким образом, настоящее изобретение может быть реализовано в блоке 600 управления, но также может быть реализовано полностью или частично в одном или более других блоках управления на транспортном средстве или вне его. Блоки управления рассматриваемого здесь типа обычно выполнены с возможностью принимать сигналы датчиков от различных частей транспортного средства. Управляющие сигналы, сформированные блоками управления, обычно зависят также от сигналов от других блоков управления и от сигналов от компонентов. В частности, блок управления выполнен с возможностью принимать сигналы от датчика 116 для скорости вращения первичного движителя, который может быть расположен, например, близко к муфте 106.
Блоки управления рассматриваемого здесь типа также обычно выполнены с возможностью доставлять управляющие сигналы к различным частям и компонентам транспортного средства, например, в настоящем примере к блоку управления первичного движителя, чтобы запросить управление его крутящим моментом.
Управление часто задается запрограммированными командами, обычно принимающими вид компьютерной программы, которая при ее исполнении на компьютере или в блоке управления заставляет компьютер или блок управления производить требуемые формы управления, например этапы способа в соответствии с настоящим изобретением. Компьютерная программа обычно принимает вид компьютерного программного продукта 603, который хранится на цифровом носителе 602, например, в постоянном запоминающем устройстве (ПЗУ), программируемом запоминающем устройстве (ППЗУ), стираемом программируемом запоминающем устройстве (СППЗУ), флэш-памяти, электрически стираемом программируемом запоминающем устройстве (ЭСППЗУ), накопителе на жестком диске и т.д., находящемся в блоке управления или соединенном с ним, и который исполняется блоком управления. Посредством изменения компьютерных программных команд таким образом возможно изменить поведение транспортного средства в конкретной ситуации.
Блок 600 управления дополнительно обеспечен соответствующими устройствами 604, 607, 605 и 606 для приема и отправки входных и выходных сигналов. Эти входные и выходные сигналы содержать формы волны, импульсы или другие атрибуты, которые устройства 604, 607, приема входных сигналов могут обнаружить как информацию, и которые могут быть преобразованы в сигналы, обрабатываемыее блоком 601 вычисления. Затем эти сигналы передаются блоку 601 вычисления. Устройства 605, 606 отправки выходных сигналов выполнены с возможностью преобразовывать сигналы, принятые от блока 601 вычисления, для того чтобы, например, посредством их модуляции создать выходные сигналы, которые могут быть переданы другим частям системы, например первичному движителю 101, для гашения колебаний силовой передачи.
Каждое из соединений с соответствующими устройствами для приема и отправки входных и выходных сигналов принимать вид одного или более из кабелей, шин данных, например шины CAN (локальной сети контроллеров), шины MOST (шины передачи данных мультимедийных систем) или какой-либо другой конфигурации шин, или беспроводного соединения. Соединения для входных сигналов и выходных сигналов и между фильтром 502, блоком 507 взятия производной, блоком 503 вычитания, множителями 511, 509 и сумматором 512, изображенными на фиг. 5, могут принимать вид одного или более из этих кабелей, шин или беспроводных соединений.
Специалист в соответствующей области техники поймет, что упомянутый выше компьютер может принимать вид блока 601 вычисления, и что упомянутая выше память может принимать вид блока 602 памяти.
Специалист в соответствующей области техники также поймет, что описанная выше система может быть модифицирована в соответствии с различными вариантами осуществления способа в соответствии с изобретением. Изобретение также имеет отношение к автомобилю 100, например, грузовику или автобусу, снабженному по меньшей мере одной системой в соответствии с изобретением.
Настоящее изобретение не ограничено описанными выше вариантами осуществления, но имеет отношение и содержит все варианты осуществления в защищенном объеме независимых пунктов приложенной формулы изобретения.

Определяют изменение циклической вариации S скорости ω вращения двигателя. Циклическую вариацию S используют для задания запрашиваемому крутящему моменту M гасящей колебания характеристики. Достигается гашение колебаний силовой передачи. 3 н. и 16 з.п. ф-лы, 6 ил.
1. Способ гашения колебания силовой передачи в транспортном средстве (100), снабженном двигателем (101), который сообщает крутящий момент, имеющий отношение к запрашиваемому крутящему моменту M, и вращается со скоростью ω, отличающийся тем, что определяют изменение циклической вариации S скорости ω вращения двигателя (101), причем циклическую вариацию S используют для задания запрашиваемому крутящему моменту M гасящей колебания характеристики.
2. Способ по п. 1, отличающийся тем, что гасящую колебания характеристику получают посредством сложения изменения циклической вариации S, умноженного на по меньшей мере один усиливающий коэффициент A1, с первоначальным запрашиваемым крутящим моментом M0.
3. Способ по п. 2, отличающийся тем, что первоначальный запрашиваемый крутящий момент M0 получают от педали акселератора и/или круиз-контроля.
4. Способ по любому из пп. 1-3, отличающийся тем, что гасящий колебания запрашиваемый крутящий момент M определяют только тогда, когда были обнаружены колебания силовой передачи.
5. Способ по п. 4, отличающийся тем, что обнаружение колебаний силовой передачи устанавливают на основе изменения циклической вариации S.
6. Способ по п. 5, отличающийся тем, что обнаружение считают показывающим, что имеется колебание силовой передачи, если для заданного количества раз амплитуда изменения циклической вариации S поочередно оказывается выше положительного порогового значения Th1 и ниже отрицательного порогового значения Th2, и если все последовательные восходящие пересечения положительного порогового значения Th1 и нисходящие пересечения отрицательного порогового значения Th2 разделены во времени не более чем на заданный период T.
7. Способ по любому из пп. 1-3 или 5-6, отличающийся тем, что изменение циклической вариации S основывается на скорости ω вращения двигателя (101).
8. Способ по п. 4, отличающийся тем, что изменение циклической вариации S основывается на скорости ω вращения двигателя (101).
9. Способ по п. 7, отличающийся тем, что скорость ω вращения содержит требуемую скорость ωd вращения и наложенную циклическую вариацию.
10. Способ по п. 9, отличающийся тем, что требуемую скорость ωd вращения определяют посредством фильтрации скорости ω вращения.
11. Способ по п. 9 или 10, отличающийся тем, что инвертированную версию наложенной циклической вариации ωs определяют посредством вычитания скорости ω вращения из требуемой скорости ωd вращения.
12. Способ по п. 9 или 10, отличающийся тем, что инвертированную версию наложенной циклической вариации ωs определяют посредство модели инвертированной версии наложенной циклической вариации ωs.
13. Способ по п. 10, отличающийся тем, что изменение циклической вариации S определяют посредством взятия производной по времени от инвертированной версии наложенной циклической вариации ωs.
14. Способ по п. 11, отличающийся тем, что изменение циклической вариации S определяют посредством взятия производной по времени от инвертированной версии наложенной циклической вариации ωs.
15. Способ по любому из пп. 1-3, 5-6, 8-10 или 13-14, отличающийся тем, что скорость ω вращения определяют посредством датчика (116), выполненного с возможностью определения скорости ω вращения, и/или модели для скорости ω вращения.
16. Система для гашения колебаний силовой передачи в транспортном средстве (100), обеспеченном двигателем (101), который сообщает крутящий момент, относящийся к запрашиваемому крутящему моменту M, и вращается со скоростью ω, отличающаяся тем, что она содержит
блок определения, выполненный с возможностью определения изменения циклической вариации S скорости ω вращения двигателя (101), и
блок крутящего момента, выполненный с возможностью использования упомянутого изменения циклической вариации S для задания запрашиваемому крутящему моменту M гасящей колебания характеристики.
17. Система по п. 16, отличающаяся тем, что блок крутящего момента выполнен с возможностью прибавления изменения циклической вариации S, умноженного на по меньшей мере один усиливающий коэффициент A1, к первоначальному запрашиваемому крутящему моменту M0, тем самым получая гасящую колебания характеристику.
18. Транспортное средство (100), отличающееся тем, что оно содержит систему по п. 16 или 17.
19. Транспортное средство (100) по п. 18, отличающееся тем, что оно представляет собой автомобиль, грузовик или автобус.
| DE 4009791 A1, 02.10.1991 | |||
| УПАКОВКА | 2001 |
|
RU2275315C2 |
| JP 2010059978 A, 18.03.2010 | |||

