Изобретение относится к области транспортного машиностроения и может быть использовано при синтезе систем управления переключением передач трансмиссии транспортной машины.
Обеспечение качества переключения передач в трансмиссии транспортных машин решается разработчиками более 100 лет. Тем не менее, совершенствование эксплуатационных свойств транспортных машин требует дальнейшего повышения качества переходных процессов переключения передач, повышения долговечности механизмов, осуществляющих переключение. В процессе переключения необходимо выполнение ряда требований: ограничение работы буксования дисков, динамического момента, приращения температуры, длительности переходного процесса, обеспечение гашения колебаний, энергоэффективности и экологичности процесса.
В работе [Держанский В.Б., Тараторкин И.А., Абдулов С.В. Управление переключением передач в трансмиссии с тремя степенями свободы // Тракторы и сельхозмашины 2012. №7. С. 22-26., рис. 4, аналог] показано, что требование одновременного обеспечения минимумов работы буксования и динамического момента противоречиво. Например, функция работы буксования фрикциона с ростом длительности процесса возрастает до 10 раз, а коэффициент динамичности при этом снижается в 2,25 раза. Область оптимального управления процессом находится вблизи линии пересечения графических зависимостей работы буксования и динамического момента от относительной скорости вращения дисков и длительности процесса переключения. Существенное снижение момента достигается при управлении давлением рабочей жидкости в серводвигателе управления фрикционом по обратной связи - относительной скорости вращения элементов фрикциона. Но это решение не предотвращает возбуждение колебательных процессов и их гашение после завершения стадии кинематического выравнивания скоростей ведущих и ведомых элементов трансмиссии на включаемой передаче. В действительности, как показывают результаты экспериментального исследования, быстрое приложение нагрузки к элементам механической системы, например, в виде единичной функции, приводит к возбуждению колебаний системы на собственной частоте.
При использовании современных высокомоментных двигателей, возбуждаются вибрации при запуске, переключении передач. Это снижает уровень комфортабельности машины. Наиболее вероятно проявление этого эффекта при управлении двигателем в процессе переключения передач, а также при функционировании системы «старт-стоп». Эти низкочастотные колебания вполне закономерны и возбуждаются при резком увеличении движущего момента в динамической системе на низшей собственной частоте (первой - одноузловой формой колебаний). Данное явление называется эффектом Бонанса и описано в книге Fischer R. и др. (см. ниже). Энергия этих колебаний пропорциональна квадрату момента, деленному на удвоенное значение угловой жесткости системы. В процессе переключения передач (особенно низших) в трансмиссии транспортной машины действующий момент имеет максимальные значения, а приведенная угловая жесткость ограничена. Это приводит к интенсивному накоплению энергии колебаний с низкими собственными частотами при переключении на низших передачах. Энергия и амплитуда колебаний могут быть уменьшены при вариации параметров системы, повышающих собственную частоту. Однако это трудно реализуемо в реальных конструкциях. Наиболее близким по технической сути и достигаемым результатам является способ гашения колебаний, изложенный в работе Fischer R, 
 Najork R, Pollak В (2015) The Automotive Transmission Book, DOI 10.1007/978-3-319-05263-2 (прототип, рис. 2.28, стр. 78). Известный способ (прототип) заключается в гашении низкочастотных колебаний в трансмиссии транспортной машины на стадии после кинематического выравнивания скоростей ведущих и ведомых частей созданием противофазного управляющего воздействия на собственной частоте динамической системы, соответствующей низшей одноузловой форме колебаний, и в оценке качества переходных процессов, т.е. перерегулирования и длительности процесса на основе моделирования динамики системы при приложении единичного управляющего воздействия (быстрое приложение момента двигателя).
Najork R, Pollak В (2015) The Automotive Transmission Book, DOI 10.1007/978-3-319-05263-2 (прототип, рис. 2.28, стр. 78). Известный способ (прототип) заключается в гашении низкочастотных колебаний в трансмиссии транспортной машины на стадии после кинематического выравнивания скоростей ведущих и ведомых частей созданием противофазного управляющего воздействия на собственной частоте динамической системы, соответствующей низшей одноузловой форме колебаний, и в оценке качества переходных процессов, т.е. перерегулирования и длительности процесса на основе моделирования динамики системы при приложении единичного управляющего воздействия (быстрое приложение момента двигателя).
В прототипе предлагается корректировать функцию управляющего сигнала: делать ее наклонной (рамповидной RAMP - плавное повышение во времени момента двигателя) или ступенчатой, увязав длительность стадий управляющей функции с периодом (частотой) собственных колебаний динамической системы.
Однако создание плавного нарастания управляющей функции снижает динамические свойства транспортной машины (интенсивность разгона), а выбор амплитуд ступенчатой функции и их знаков недостаточно формализован и осуществляется интуитивно с учетом опыта исследователя, т.е. носит субъективный характер. В этом состоит основной недостаток метода. В настоящее время алгоритм выбора параметров ступенчатых функций, т.е. амплитуды и длительности импульсов (ступеней) формализован и излагается в так называемой теории построения Shaper-фильтров. Однако их эффективность, как и в способе, изложенном Фишером, обеспечивается лишь при нулевых начальных условиях. В реальных системах управления переключением передач транспортной машины начальные условия после кинематического выравнивания скоростей ведущих и ведомых элементов не являются нулевыми, формируются случайным образом в зависимости от совокупности факторов, определяемых крутящими моментами двигателя, сопротивления движению, а также колебательными процессами динамической системы.
В предлагаемом способе гашение колебаний осуществляется как в прототипе корректировкой функции управляющего сигнала. Новизна способа заключается в синтезе регулятора на основе расчета параметров перераспределения во времени управляющей функции в соответствии с алгоритмами ZV (Zero Vibration), ZVD (Zero Vibration and Derivative), ZVDD (Zero Vibration and Double Derivative), RAMP и др. Амплитуда и длительность ступеней управляющей функции, а также начало действия алгоритма, определяются начальными условиями колебательного процесса динамической системы, которые идентифицируются по сигнатурам первой и второй производных крутящего момента. При этом управляющий сигнал разрабатываемого регулятора принимается из условия, чтобы суммарная амплитуда ступенчатого воздействие на систему осталось неизменной:

где n - количество импульсов; Ai - амплитуда i-го импульса.
Основным параметром, определяющим качество работы регулятора, является степень подавления колебаний в системе. Оценка производится в виде отношения амплитуды остаточных колебаний в системе, в которой входной сигнал был сформирован синтезированным регулятором, к амплитуде остаточных колебаний, которые возникли бы в той же системе без преобразования входного сигнала. Степень подавления колебаний определяется следующими выражениями:


где ω частота колебаний; ε коэффициент демпфирования; ti время i-го импульса. Параметры регулятора Ai и ti получаются путем решения уравнения (2), задаваясь максимально допустимым уровнем колебаний V(ω,ε)max. При этом значения ω и ε обычно выбирают равными собственной частоте и коэффициенту демпфирования объекта управления, которые могут быть определены по математической модели или по результатам экспериментальных исследований.
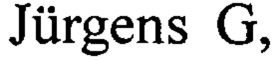
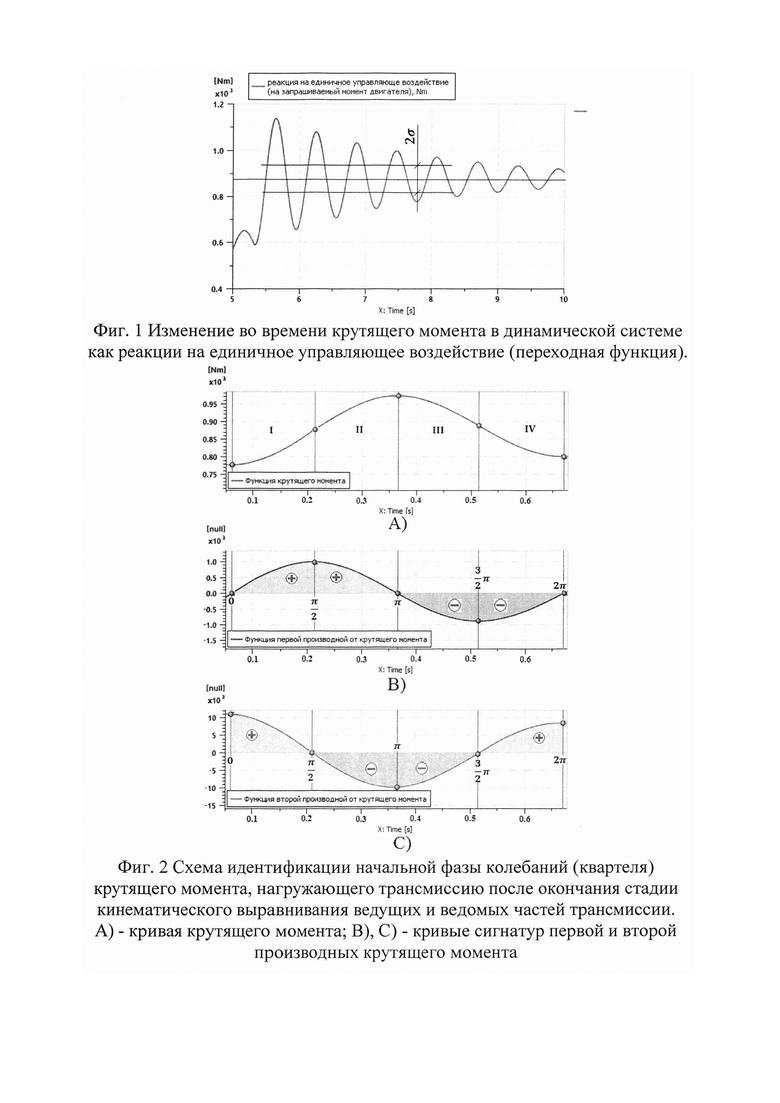
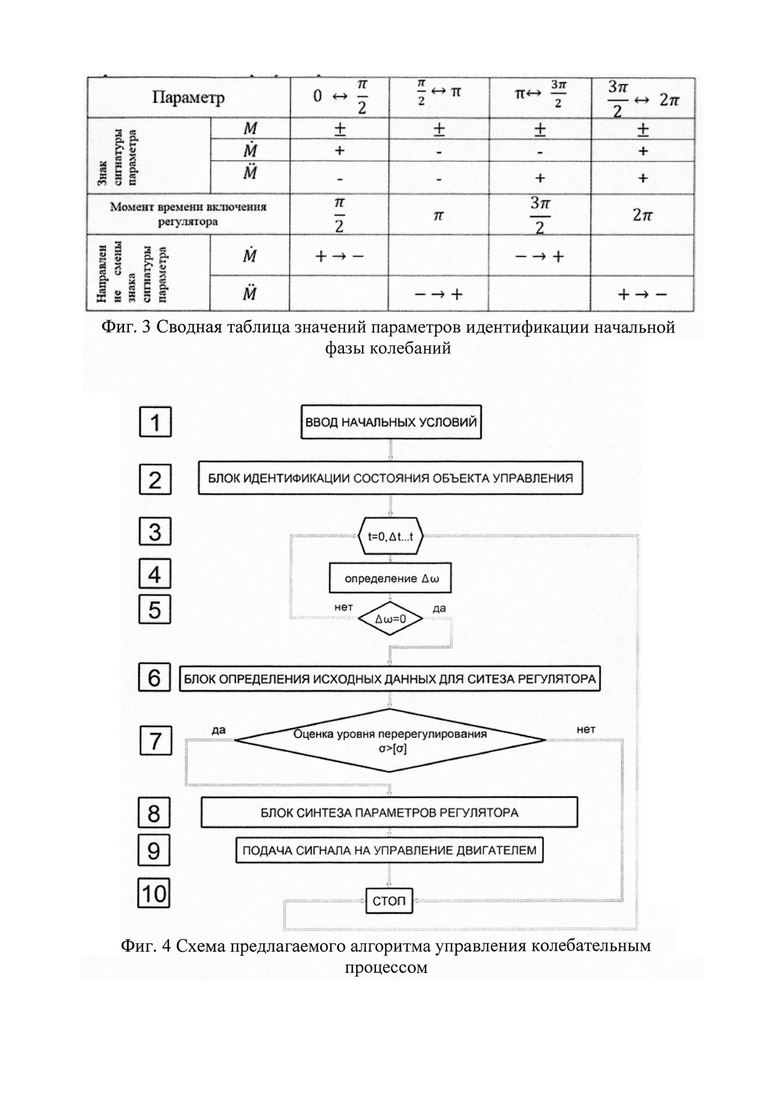
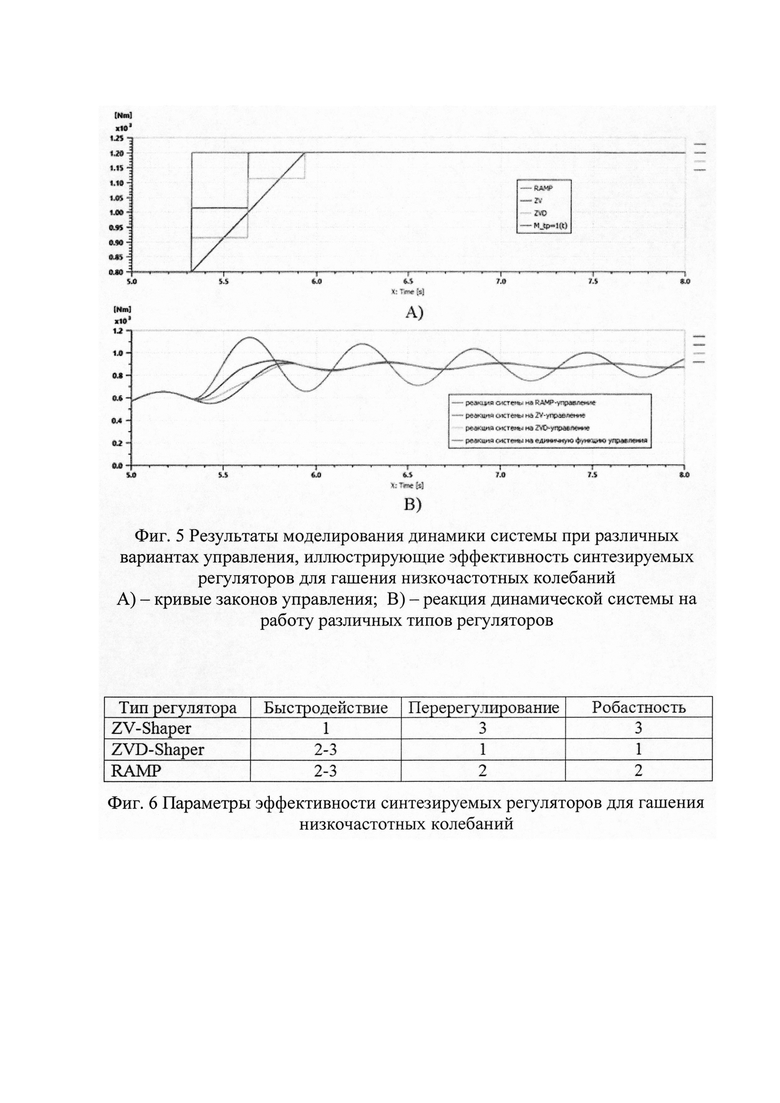
На фиг. 1 показано изменение во времени крутящего момента в динамической системе как реакции на единичное управляющее воздействие (переходная функция). На фиг. 2 приведена схема идентификации начальной фазы колебаний крутящего момента, нагружающего трансмиссию после окончания стадии кинематического выравнивания ведущих и ведомых частей трансмиссии. В таблице (фиг. 3) приведены значения сигнатур крутящего момента, его первой и второй производных, позволяющие определить номер четверти периода колебаний и момент времени включения управляющего воздействия. На фиг. 4 показана схема предлагаемого алгоритма управления колебательным процессом. На фиг. 5 приведены результаты моделирования динамики системы при различных вариантах управления, иллюстрирующие эффективность синтезируемых регуляторов для гашения низкочастотных колебаний. В таблице (фиг. 6) приведены результаты оценки эффективности рассматриваемых алгоритмов.
В результате исследования динамики переключения передач транспортных машин установлено, что тип синтезируемых алгоритмов определяется в зависимости от приоритетности требуемых характеристик качества переходных процессов (перерегулирования, робастности, быстродействия).
Результаты совместного анализа перерегулирования, быстродействия и робастности различных Input Shapers позволяет сделать заключение о неоднозначности оценки по отдельным параметрам. Например, лучшее быстродействие демонстрирует ZV-Shaper. При этом он же является наихудшем с точки зрения робастности, т.е. при вариации собственной частоты эффективность алгоритма существенно снижается. Сопоставимое значение показателя робастности демонстрирует RAMP-алгоритм, но при этом его показатели быстродействия равны соответствующим показателям ZVD-алгоритма и существенно уступают ZV-алгоритму. Лучшие показатели перерегулирования демонстрирует ZVD-Shaper, худшие ZV-Shaper и сопоставимые с ним RAMP-алгоритм. Результаты оценки эффективности различных алгоритмов по свойствам перерегулирования, быстродействия и робастности сведены в таблицу на фиг. 6.
Из приведенных результатов следует, что ни один из рассмотренных алгоритмов не обеспечивает наилучшего качества по всем трем параметрам. Выбор типа алгоритма может быть осуществлен в зависимости от приоритета параметра оценки качества переходного процесса.
При приложении момента в виде единичной функции после окончания стадии кинематического выравнивания динамический момент во времени изменяется по гармоническому затухающему закону в соответствии с дифференциальным уравнением второго порядка:

где  - момент инерции; b - коэффициент демпфирования; с - жесткость; ϕ - угловая координата; Mtp=1(t) - единичное управляющее воздействие. Решение данного уравнения описывается выражением:
- момент инерции; b - коэффициент демпфирования; с - жесткость; ϕ - угловая координата; Mtp=1(t) - единичное управляющее воздействие. Решение данного уравнения описывается выражением:

где K - коэффициент усиления, равный  ; ε - фаза колебания; ωс - собственная частота системы (модуль мнимой части корней характеристического уравнения); α - реальная часть корней характеристического уравнения. Временная функция, характеризующая качество переходного процесса представлена на фиг. 1. Если величина перерегулирования превышает допустимый интервал 2σ (см. фиг. 1), то необходимо синтезировать регулятор.
; ε - фаза колебания; ωс - собственная частота системы (модуль мнимой части корней характеристического уравнения); α - реальная часть корней характеристического уравнения. Временная функция, характеризующая качество переходного процесса представлена на фиг. 1. Если величина перерегулирования превышает допустимый интервал 2σ (см. фиг. 1), то необходимо синтезировать регулятор.
Для корректного применения одного из алгоритмов перераспределения управляющего воздействия необходимо определить момент времени включения регулятора. Для этого по значению крутящего момента в трансмиссии (фиг. 2, график А) и знакам (сигнатурам) первой (фиг. 2, график В) и второй (фиг. 2, график С) производных необходимо определить, в какой четверти периода собственного колебания (квартиле) происходит колебательное движение динамической системы. Результаты идентификации квартилей по значению крутящего момента и знакам сигнатур его производных сведены в таблицу (фиг. 3). Например, если процесс осуществляется в первом квартиле, то знак первой производной крутящего момента положительный, а знак второй производной отрицательный. Если процесс осуществляется во втором квартиле, то знаки первой и второй производной крутящего момента отрицательные. Если процесс происходит в третьем квартиле, то знак первой производной отрицательный, а знак второй производной положительный. Если процесс происходит в четвертом квартиле, то знаки первой и второй производной момента положительные. Данные соотношения приведены в таблице на фиг. 2, строки 1-4. При этом момент времени включения регулятора определяется так же по значениям сигнатур (изменению знаков сигнатур) соответствующих производных динамического момента (таблица на фиг. 3, строки 5-7). Например, при нахождении в первой четверти периода момент времени включения регулятора  определяется нулевым значением первой производной момента (знак производной меняется с плюса на минус); при нахождении во второй четверти периода, момент времени включения регулятора (π) определяется нулевым значением второй производной момента (знак производной меняется с минуса на плюс); при нахождении в третьей четверти периода, момент времени включения регулятора
определяется нулевым значением первой производной момента (знак производной меняется с плюса на минус); при нахождении во второй четверти периода, момент времени включения регулятора (π) определяется нулевым значением второй производной момента (знак производной меняется с минуса на плюс); при нахождении в третьей четверти периода, момент времени включения регулятора  определяется нулевым значением первой производной момента (знак производной меняется с минуса на плюс); при нахождении в четвертой четверти периода, момент времени включения регулятора (2π) определяется нулевым значением второй производной момента (знак производной меняется с плюса на минус).
определяется нулевым значением первой производной момента (знак производной меняется с минуса на плюс); при нахождении в четвертой четверти периода, момент времени включения регулятора (2π) определяется нулевым значением второй производной момента (знак производной меняется с плюса на минус).
После определения момента времени включения регулятора предлагаемая система управления работает по алгоритму, схема которого приведена на фиг. 4. Для реализации алгоритма вводятся начальные условия (блок 1), включающие в себя таблицу значений собственных частот по передачам, как функций номера включенной передачи и схемы подключения мостов  ; допустимые значения параметров перерегулирования по передачам σj, [%] и коэффициенты демпфирования рассматриваемых модальных форм αj. Циклическая программа управления предусматривает определение собственной частоты системы как функции номера включенной передачи и схемы включения ведущих мостов (блок 2). При этом принимаются во внимание Nj - номер включенной передачи; Kсх - идентификатор схемы включения ведущих мостов;
; допустимые значения параметров перерегулирования по передачам σj, [%] и коэффициенты демпфирования рассматриваемых модальных форм αj. Циклическая программа управления предусматривает определение собственной частоты системы как функции номера включенной передачи и схемы включения ведущих мостов (блок 2). При этом принимаются во внимание Nj - номер включенной передачи; Kсх - идентификатор схемы включения ведущих мостов;  - собственная частота динамической системы, как функция Nj и Kсх для включаемой передачи; αj - коэффициент демпфирования данной формы колебания (определяется экспериментально);
- собственная частота динамической системы, как функция Nj и Kсх для включаемой передачи; αj - коэффициент демпфирования данной формы колебания (определяется экспериментально);  - относительная скорость вращения ведущих и ведомых элементов трансмиссии на включаемой передаче; PR - приоритетный параметр, характеризующий качество переходного процесса: -перерегулирование σ, [%], быстродействие ts, [с], - робастность. Затем формируется циклическая программа по времени t с шагом Δt (блок 3). Кроме того, измеряется относительная угловая скорость ведущих и ведомых элементов трансмиссии, их разность (блок 4), позволяющая идентифицировать окончание стадии кинематического выравнивания. После достижения кинематического выравнивания Δω=0 (блок 5) в блоке 6 осуществляется запрос информационно-измерительной управляющей системой (ИИУС) машины требуемого момента двигателя Mtp, обеспечивающего необходимое ускорение движения
- относительная скорость вращения ведущих и ведомых элементов трансмиссии на включаемой передаче; PR - приоритетный параметр, характеризующий качество переходного процесса: -перерегулирование σ, [%], быстродействие ts, [с], - робастность. Затем формируется циклическая программа по времени t с шагом Δt (блок 3). Кроме того, измеряется относительная угловая скорость ведущих и ведомых элементов трансмиссии, их разность (блок 4), позволяющая идентифицировать окончание стадии кинематического выравнивания. После достижения кинематического выравнивания Δω=0 (блок 5) в блоке 6 осуществляется запрос информационно-измерительной управляющей системой (ИИУС) машины требуемого момента двигателя Mtp, обеспечивающего необходимое ускорение движения  в заданных условиях движения, по уравнению 4 определяется расчетный крутящий момент в трансмиссии как реакция на единичное управляющее воздействие (параметры переходного процесса (σ, ts).
в заданных условиях движения, по уравнению 4 определяется расчетный крутящий момент в трансмиссии как реакция на единичное управляющее воздействие (параметры переходного процесса (σ, ts).
В блоке 7 осуществляется сравнение степени перерегулирования σ с допустимым значением. Если перерегулирование превышает допустимое значение, то выполняется в блоке 8 синтез параметров силового перераспределения управляющего сигнала Ai и ti (амплитуды и длительности их действия) для типа регулятора (Shaper-фильтра), обеспечивающего требуемое значение приоритетного параметра качества переходного процесса (перерегулирование, быстродействие или робастность). Для выделения функции момента (измеренного), соответствующего первой одноузловой форме колебаний осуществляется фильтрация применением режекторного фильтра на собственной частоте ωc системы с полосой пропускания ±(Δ%)⋅ωc. В этом выражении Δ% - учитывает возможность варьирования собственной частоты системы и определяет приоритетность выбранного регулятора по степени его робастности. Например, как показывают результаты моделирования для первой передачи автомобиля массой 3 т, для ZV-Shaper при заданном уровне перерегулирования 10% полоса пропускания Δ% ≈ ±5; для ZVD-Shaper при заданном уровне перерегулирования 10% полоса пропускания составляет Δ% ≈ ±20%; для ZVDD-Shaper при заданном уровне перерегулирования 10% полоса пропускания Δ% ≈ ±30%.
Далее, по сигнатурам полученного (отфильтрованного) крутящего момента, его первой и второй производных, определяется номер текущего квартеля колебательного процесса и его временных границ. Правая граница интервала определяет момент времени приложения управляющего силового воздействия синтезированного регулятора.
После этого осуществляется передача параметров синтезированного регулятора в систему управления подачей топлива двигателя (блок 9). На этом работа алгоритма заканчивается (блок 10).
На фиг. 5 представлены результаты моделирования динамики системы при управлении тремя регуляторами. Результаты моделирования иллюстрируют эффективность синтезируемых регуляторов для гашения низкочастотных колебаний. Из графиков на фиг. 5 и результатов обработки экспериментальных данных сведенных в таблицу (фиг. 6) следует, что ZVD-алгоритм обеспечивает наивысшую эффективность по ограничению перерегулирования при приемлемых значениях быстродействия и робастности. В целом анализ полученных результатов свидетельствует об эффективности перераспределения управляющего крутящего момента при переключении передач.
В то же время из результатов моделирования динамики энерго-силовой установки рассматриваемого объекта исследования следует, что для первых трех передач целесообразно применение ZVD-Shaper. При требовании более высокого быстродействия возможно применение ZV-Shaper. Для передач начиная с 4-й и выше целесообразно применение RAMP-алгоритма. При этом время нарастания управляющего воздействия должно соответствовать периоду собственной частоты для данной передачи. Приложение управляющего воздействия за время меньшее длительности периода приводит к резкому ухудшению показателей перерегулирования и робастности. Приложение управляющего воздействия за время превышающее длительность периода собственных колебаний приводит к неприемлемому снижению динамики разгона.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2534128C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРИВЕДЕННОГО МОМЕНТА ИНЕРЦИИ ДОТРАНСФОРМАТОРНОЙ ЗОНЫ ГИДРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2015 |
|
RU2581891C1 |
| Способ расчетно-экспериментального определения динамического момента в энергосиловом блоке транспортной машины | 2021 |
|
RU2767210C1 |
| Способ исключения резонансных режимов в фрикционных дисках гидромеханической трансмиссии транспортной машины | 2019 |
|
RU2728584C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕБУЕМОГО ПОВОРАЧИВАЮЩЕГО МОМЕНТА СИСТЕМЫ УПРАВЛЕНИЯ ПОВОРОТОМ ГУСЕНИЧНОЙ МАШИНЫ | 2017 |
|
RU2665159C1 |
| СПОСОБ ИСКЛЮЧЕНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ МЕТАЛЛОКЕРАМИЧЕСКИХ ДИСКОВ ГИДРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2012 |
|
RU2499927C1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Система регулирования | 1988 |
|
SU1654777A1 |
| Самонастраивающаяся робастная система управления | 2023 |
|
RU2819264C1 |
| ГИДРОМЕХАНИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ | 2013 |
|
RU2545841C2 |
Изобретение относится к способу гашения низкочастотных колебаний в трансмиссии транспортной машины на стадии после кинематического выравнивания скоростей ведущих и ведомых частей. Способ заключается в создании противофазного управляющего воздействия на собственной частоте динамической системы, соответствующей низшей одноузловой форме колебаний. Новизна заключается в синтезе регулятора на основе расчета параметров перераспределения во времени управляющей функции в соответствии с алгоритмами ZV (Zero Vibration), ZVD (Zero Vibration and Derivative), ZVDD (Zero Vibration and Double Derivative), RAMP и др. Амплитуда и длительность ступеней управляющей функции (управляющего момента), а также начало действия алгоритма определяются начальными условиями колебательного процесса динамической системы, которые идентифицируются по сигнатурам первой и второй производных крутящего момента. Тип регулятора (Shaper-фильтра) определяется на основе выбора приоритетного параметра, характеризующего качество переходного процесса - перерегулирования, быстродействия или робастности. Достигается повышение эксплуатационных свойств транспортных машин, таких как интенсивность разгона, уровень комфортабельности. 6 ил.
Способ гашения низкочастотных колебаний в трансмиссии транспортной машины на стадии после кинематического выравнивания скоростей ведущих и ведомых частей заключается в создании противофазного управляющего воздействия на собственной частоте динамической системы, соответствующей низшей одноузловой форме колебаний, отличается тем, что в алгоритм работы системы дополнительно введен блок идентификации номера включаемой передачи, схемы включения ведущих мостов и разности относительной скорости ведущих и ведомых элементов системы, определяющей момент времени окончания стадии кинематического выравнивания; после этого осуществляется запрос ИИУС требуемого момента двигателя на данной передаче для обеспечения движения с заданным ускорением; задается величина допустимого перерегулирования момента; прогнозируются реакция системы на единичное управляющее воздействие, то есть параметры качества переходного процесса при быстром приложении момента; при превышении допустимой степени перерегулирования выполняется расчет параметров силового перераспределения управляющего крутящего момента для выбранного алгоритма управления, например ZV, ZVD, ZVDD, RAMP,то есть амплитуд и длительностей их действия с учетом начальной фазы колебания, соответствующей низшей одноузловой форме, определяемой по значениям сигнатур первой и второй производных момента; сформированный сигнал, соответствующий установленным значениям параметров силового перераспределения, передается на блок управления моментом двигателя.
| СПОСОБ ГАШЕНИЯ КРУТИЛЬНЫХ КОЛЕБАНИЙ ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2009 |
|
RU2412389C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГАШЕНИЕМ КОЛЕБАНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2412839C2 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ В МЕХАНИЧЕСКОЙ ТРАНСМИССИИ ВЕРТОЛЕТА | 1979 |
|
RU906124C |
| Автоматический стопор для канатов или цепей | 1926 |
|
SU5524A1 |

