Изобретение относится к области авиации, в частности к конструкции приводов несущих винтов многовинтового летательного аппарата.
Известен аналог – многовинтовой летательный аппарат – GB2566095B, 04.09.2017, содержащий по меньшей мере два пропеллера, которые создают аэродинамическую тягу летательному аппарату, источник механической энергии, например, двигатель внутреннего сгорания, выходной вал с приводом от источника механической энергии, по меньшей мере один регулируемый насос, механически соединенный с выходным валом, по меньшей мере два гидромотора, каждый из которых приводит в движение соответствующий пропеллер, по меньшей мере два гидромотора гидравлически соединены с одним регулируемым насосом.
Недостатком аналога является повышенная масса летательного аппарата, обусловленная применением регулируемого насоса. Регулируемый насос подразумевает применение редуктора, который имеет большой вес. Это снижает полезную массу летательного аппарата, а для некоторых летательных аппаратов делает взлет невозможным, например, для схемы квадрокоптера, так как в нём необходимо применение как минимум двух регулируемых насосов.
Известен аналог – многовинтовой летательный аппарат – WO2016068767A1, дата приоритета 30.10.2014, содержащий по меньшей мере три пропеллера с фиксированным шагом, каждый из которых имеет привод от отдельного гидромотора, имеются гидронасосы, гидравлически соединенные с гидромоторами, имеется регулятор расхода жидкости, который установлен на выходе из гидронасоса, имеется двигатель внутреннего сгорания, имеется вал с приводом от двигателя внутреннего сгорания, механически соединенный с гидронасосами, гидронасосы расположены с одной стороны относительно двигателя внутреннего сгорания.
Недостатком аналога является большая масса регулятора расхода жидкости, так как регулятор включён в магистраль высокого давления , что увеличивает массу летательного аппарата и снижает полезную массу летательного аппарата.
Известен аналог – квадрокоптер с гидравлическим приводом несущих винтов с фиксированным шагом лопастей – RU181367, дата приоритета 26.12.2017, принятый в качестве прототипа, содержащий маршевый двигатель внутреннего сгорания, четыре несущих винта с фиксированным шагом лопастей и привод, передающий энергию от двигателя к несущим винтам, отличающийся тем, что использован регулируемый гидравлический привод, состоящий из независимых гидравлических контуров, равных по количеству несущим винтам, каждый независимый гидравлический контур содержит регулируемый гидронасос, подающий рабочую жидкость высокого давления по напорной магистрали на вход исполнительного гидромотора, выход из которого по сливной магистрали низкого давления связан со входом регулируемого насоса, на сливной магистрали в области воздушного потока несущего винта расположен воздушно-масляный теплообменный аппарат, на выходных валах маршевого двигателя и исполнительных гидромоторов расположены датчики частоты вращения.
Недостатком прототипа является повышенная масса летательного аппарата, обусловленная применением регулируемого насоса. Регулируемый насос подразумевает применение редуктора, который имеет большой вес. Это снижает полезную массу летательного аппарата, снижает маневренность летательного аппарата, снижает его устойчивость полете, снижает безопасность полёта. В некоторых случаях это делает взлет невозможным. Другим недостатком является расположение насосов с одной стороны относительно двигателя внутреннего сгорания, что ухудшает балансировку летательного аппарата, негативно влияя на безопасность полёта и маневренность, а также повышает требования к распределению массы полезного груза для обеспечения устойчивости и возможности полета.
Технический результат изобретения заключается в повышении безопасности полета летательного аппарата, повышении полезной взлетной массы летательного аппарата, повышении его маневренности и устойчивости в полёте, обеспечении оптимальной балансировки, при которой снижаются требования по распределению массы полезного груза на борту летательного аппарата, повышении КПД трансмиссии.
Технический результат достигается тем, что квадрокоптер с гидравлическим приводом несущих винтов с фиксированным шагом лопастей содержит маршевый двигатель внутреннего сгорания, четыре несущих винта с фиксированным шагом лопастей и гидравлический привод несущего винта, передающий энергию от двигателя внутреннего сгорания к несущим винтам, содержащий гидравлический контур, в который входит гидронасос, подающий рабочую жидкость по напорной магистрали высокого давления на вход исполнительного гидромотора, выход из которого по сливной магистрали низкого давления связан со входом гидронасоса, гидравлический привод содержит два шестеренчатых гидронасоса, имеющих прямой привод без редукции от двигателя внутреннего сгорания, каждый из гидронасосов имеет два независимых входа и два независимых выхода, питает два исполнительных гидромотора, перед каждым входом гидронасоса в сливной магистрали низкого давления установлен регулятор расхода рабочей жидкости, насосы расположены по разные стороны относительно двигателя внутреннего сгорания, отношение производительности гидронасоса к производительности гидромотора находится в диапазоне от 1:1,5 до 1:3.
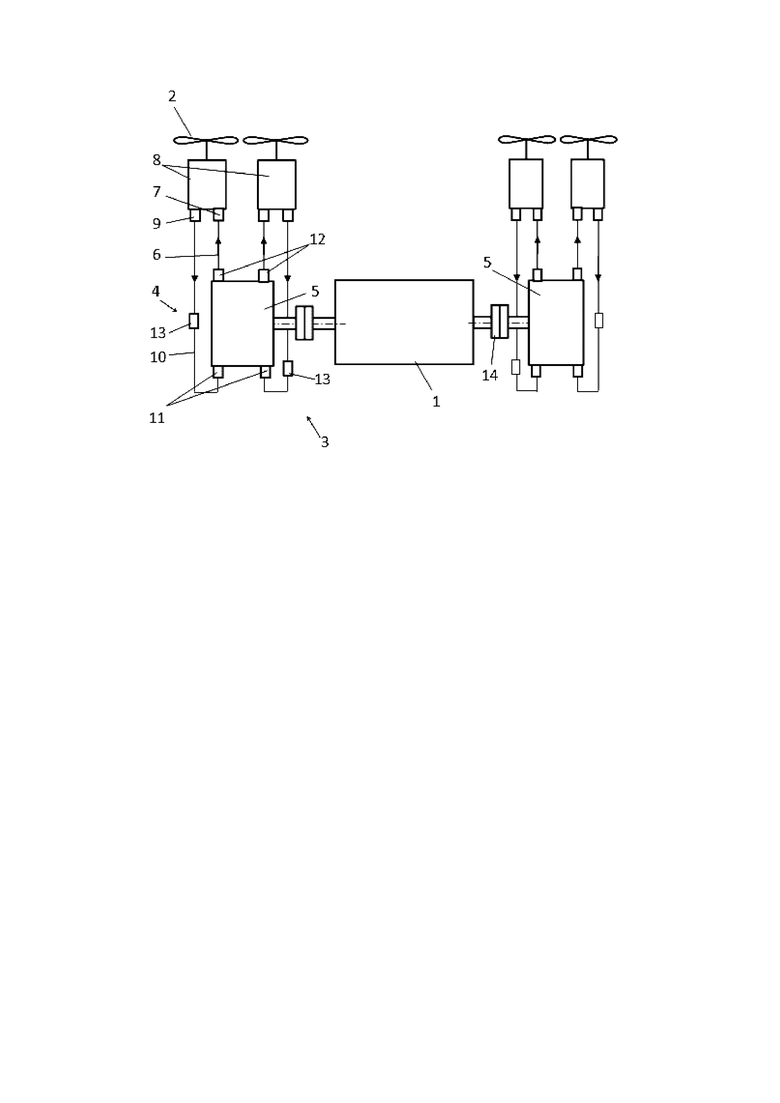
На чертеже изображена схема квадрокоптера с гидравлическим приводом несущих винтов с фиксированным шагом лопастей.
Квадрокоптер с гидравлическим приводом несущих винтов с фиксированным шагом лопастей содержит маршевый двигатель внутреннего сгорания 1, четыре несущих винта 2 с фиксированным шагом лопастей и гидравлический привод 3 несущего винта 2, передающий энергию от двигателя внутреннего сгорания 1 к несущим винтам 2, содержащий гидравлический контур 4, в который входит гидронасос 5, подающий рабочую жидкость по напорной магистрали высокого давления 6 на вход 7 исполнительного гидромотора 8, выход 9 из которого по сливной магистрали низкого давления 10 связан со входом 11 гидронасоса 5, гидравлический привод 3 содержит два шестеренчатых гидронасоса 5, имеющих прямой привод без редукции от двигателя внутреннего сгорания 1, каждый из гидронасосов 5 имеет два независимых входа 11 и два независимых выхода 12, питает два исполнительных гидромотора 8, перед каждым входом 11 гидронасоса 5 в сливной магистрали низкого давления 10 установлен регулятор расхода рабочей жидкости 13, насосы 5 расположены по разные стороны относительно двигателя внутреннего сгорания 1, отношение производительности гидронасоса 5 к производительности гидромотора 8 находится в диапазоне от 1:1,5 до 1:3.
Рассмотрим пример конкретной реализации квадрокоптера с гидравлическим приводом несущих винтов с фиксированным шагом лопастей. В примере конкретной реализации в качестве маршевого двигателя внутреннего сгорания 1 применён двухтактный двухцилиндровый Rotax 503/MZ202. В качестве гидронасосов 5 применены тандемы шестеренчатых насосов НШ 6. Применение шестерёнчатых насосов обеспечивает достижение большей мощности при малых габаритах и весе, что позволяет повысить полезную массу летательного аппарата. Простота конструкции насоса обеспечивает его надежную работу. Данный тип насоса работает в больших диапазонах частоты вращения, необходимых для данного применения. Шестеренчатые насосы позволяют изготовление тандема насосов для создания требуемых для летательного аппарата характеристик расхода. В качестве гидромоторов 8 применены аксиально-поршневые гидромоторы 310.12.01. Вал каждого гидронасоса 5 соединен с валом двигателя внутреннего сгорания 1 через муфту 14, без редуктора. Отношение производительности гидронасоса 5 к производительности гидромотора 8 находится в диапазоне от 1:1,5 до 1:3. Этим отношением достигается редукция - достигается разница между оборотами двигателя ДВС и оборотами винтов 2, при которых летательный аппарат имеет максимальную подъёмную силу и поэтому он может подняться в воздух. За счет этого соотношения обеспечивается возможность применения гидронасосов 5 с прямым приводом без редукции от двигателя внутреннего сгорания 1, что снижает массу летательного аппарата, повышает полезную взлетную массу летательного аппарата. Отсутствие редуктора увеличивает надёжность летательного аппарата. При уменьшении редукции менее значения 1:1,5 необходимо уменьшение диаметра винтов 2. При уменьшении диаметра винтов 2, уменьшается их подъёмная сила, что негативно сказывается на характеристиках летательного аппарата, вплоть до невозможности взлёта. При увеличении редукции больше значения 1:3 увеличивается диаметр винта 2 и подъёмная сила летательного аппарата, но увеличиваются габариты, что ухудшает манёвренность летательного аппарата. Расположение гидронасосов 5 по обе стороны от двигателя внутреннего сгорания 1 позволяет распределить нагрузку на вал гидронасосов 5, обеспечивает оптимальную весовую балансировку летательного аппарата. Благодаря такому расположению гидронасосов 5 уменьшается расстояние от гидронасоса 5 до гидромотора 8, что приводит к уменьшению потерь в напорной магистрали высокого давления 6 и к более высокому КПД трансмиссии. Регулятор расхода рабочей жидкости 13 представляет из себя регулируемый дистанционно клапан. Он служит для управления оборотами винта 2. Благодаря тому, что регулятор расхода рабочей жидкости 13 установлен перед входом 11 гидронасоса 5 в сливной магистрали низкого давления 10 нагрузка на него не большая, так как в сливной магистрали давление жидкости меньше, чем в напорной. Благодаря этому регулятор расхода рабочей жидкости 13 менее нагружен и выполняется более лёгким, что обеспечивает повышение полезной взлетной массы летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мультироторная летающая платформа с гидроприводом вращения несущих винтов | 2022 |
|
RU2799957C1 |
| СПОСОБ РАБОТЫ ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2024 |
|
RU2833362C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| МНОГОВИНТОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2693616C2 |
| Трансмиссия вертолёта соосной схемы несущих винтов | 2019 |
|
RU2732932C1 |
| ГИДРОПРИВОД МНОГОВИНТОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2808657C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2018 |
|
RU2699452C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2024 |
|
RU2838699C1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА МАШИНЫ С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2529111C1 |
| МАХОЛЕТ "ПЧЕЛА" | 1991 |
|
RU2007337C1 |
Изобретение относится к области авиации, в частности к конструкции приводов несущих винтов многовинтового летательного аппарата. Квадрокоптер с гидравлическим приводом несущих винтов с фиксированным шагом лопастей содержит маршевый двигатель внутреннего сгорания, четыре несущих винта с фиксированным шагом лопастей и гидравлический привод несущего винта, передающий энергию от двигателя к несущим винтам. Привод содержит гидравлический контур, в который входит гидронасос, подающий рабочую жидкость на вход исполнительного гидромотора, выход из которого по сливной магистрали низкого давления связан со входом гидронасоса. Гидравлический привод содержит два тандема шестеренчатых гидронасосов, имеющих прямой привод без редукции от двигателя. Каждый из тандема гидронасосов имеет по два независимых входа и выхода, питает два исполнительных гидромотора. Перед каждым входом гидронасоса в сливной магистрали низкого давления установлен регулятор расхода рабочей жидкости. Отношение производительности гидронасоса к производительности гидромотора находится в диапазоне от 1:1,5 до 1:3. Обеспечивается повышение безопасности полета, маневренности и устойчивости в полёте, повышение КПД трансмиссии. 1 ил.
Квадрокоптер с гидравлическим приводом несущих винтов с фиксированным шагом лопастей, содержащий маршевый двигатель внутреннего сгорания, четыре несущих винта с фиксированным шагом лопастей и гидравлический привод несущего винта, передающий энергию от двигателя внутреннего сгорания к несущим винтам, содержащий гидравлический контур, в который входит гидронасос, выполненный с возможностью подачи рабочей жидкости по напорной магистрали высокого давления на вход исполнительного гидромотора, выход из которого по сливной магистрали низкого давления связан со входом гидронасоса, отличающийся тем, что гидравлический привод содержит два тандема шестеренчатых насосов, имеющих прямой привод без редукции от двигателя внутреннего сгорания, каждый из гидронасосов имеет два независимых входа и два независимых выхода, питает два исполнительных гидромотора, перед каждым входом гидронасоса в сливной магистрали низкого давления установлен регулятор расхода рабочей жидкости, насосы расположены по разные стороны относительно двигателя внутреннего сгорания, отношение производительности гидронасоса к производительности гидромотора находится в диапазоне от 1:1,5 до 1:3.
| 0 |
|
SU181367A1 | |
| Летательный аппарат | 1978 |
|
SU1153821A3 |
| EP 3450312 A1, 06.03.2019 | |||
| МНОГОВИНТОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2693616C2 |

