Изобретение относится к области авиации, а именно к летательным аппаратам с несущими винтами, приводимые во вращение гидроприводом.
Известен квадрокоптер с гидравлическим приводом несущих винтов с фиксированным шагом лопастей RU 2732305 C1, опубл. 15.09.2020, содержащий маршевый двигатель внутреннего сгорания, четыре несущих винта с фиксированным шагом лопастей и гидравлический привод несущего винта, передающий энергию от двигателя внутреннего сгорания к несущим винтам, содержащий гидравлический контур, в который входит гидронасос, выполненный с возможностью подачи рабочей жидкости по напорной магистрали высокого давления на вход исполнительного гидромотора, выход из которого по сливной магистрали низкого давления связан со входом гидронасоса, отличающийся тем, что гидравлический привод содержит два тандема шестеренчатых насосов, имеющих прямой привод без редукции от двигателя внутреннего сгорания, каждый из гидронасосов имеет два независимых входа и два независимых выхода, питает два исполнительных гидромотора, перед каждым входом гидронасоса в сливной магистрали низкого давления установлен регулятор расхода рабочей жидкости, насосы расположены по разные стороны относительно двигателя внутреннего сгорания, отношение производительности гидронасоса к производительности гидромотора находится в диапазоне от 1:1,5 до 1:3.
Недостатком данного технического решения является применение в качестве управляющего устройства регулятора расхода рабочей жидкости, работа которого заключается в постоянном "искусственном" торможении гидромотора для уменьшения его скорости вращения, путем повышения давления в сливной линии гидромотора, уменьшая КПД гидропривода, что в свою очередь снижает энергоэффективность летательного аппарата и может привести к перегреву рабочей жидкости. Для исключения перегрева рабочей жидкости требуется установка теплообменных аппаратов со значительным теплосъемом, т.к. отношение производительности насоса к производительности гидромотора находится в диапазоне от 1:1,5 до 1:3, т.е. расход через гидромотор может изменяться в 2 раза. Кроме того, при таком управлении гидроприводом будет повышенное потребление энергоносителя приводного двигателя.
Известен многовинтовой летательный аппарат RU 181367 U1, опубл. 11.07.2018, содержащий маршевый двигатель внутреннего сгорания, не менее трех несущих винтов с фиксированным шагом лопастей и привод, передающий энергию от двигателя к несущим винтам, отличающийся тем, что использован регулируемый гидравлический привод, состоящий из независимых гидравлических контуров, равных по количеству несущим винтам, каждый независимый гидравлический контур содержит регулируемый гидронасос, подающий рабочую жидкость высокого давления по напорной магистрали на вход исполнительного гидромотора, выход из которого по сливной магистрали низкого давления связан со входом регулируемого насоса, на сливной магистрали в области воздушного потока несущего винта расположен воздушно-масляный теплообменный аппарат, на выходных валах маршевого двигателя и исполнительных гидромоторов расположены датчики частоты вращения.
Недостатком данного технического решения является использование в качестве гидропередачи гидропривода объемного регулирования с регулированием скорости вращения вала гидромотора производительностью насоса. Такое техническое решение не позволяет получить наилучшее быстродействие гидропривода из-за значительных длин гидролиний от насоса к гидромотору, а также ведет к увеличению массогабаритных характеристик летательного аппарата. Кроме того, недостатком данного технического решения является соединение вала исполнительного гидромотора с несущим винтом, выполненное непосредственно без понижающего редуктора от вала гидромотора до вала винта, вследствие чего, в процессе регулирования скорости вращения несущего винта на валу гидромотора присутствует значительная нагрузка от момента инерции несущего винта, что приводит к увеличению постоянной времени гидропривода, ухудшению динамики гидропривода и управляемости летательного аппарата.
Наиболее близким аналогом, принятый за прототип, является гидравлический привод винтового летательного аппарата RU 205086 U1, опубл. 28.06.2021, содержащий насосную станцию, включающую основной регулируемый насос и нерегулируемый насос подпитки с блоком обратно-предохранительных и редукционного клапанов, четыре исполнительных гидромотора, связанные с соответствующим воздушным винтом, напорные и сливные гидролинии, отличающийся тем, что основной регулируемый насос соединен с входами каждого из четырех исполнительных гидравлических моторов с возможностью регулирования их рабочего объема электрогидравлическими пропорциональными регуляторами.
Недостатком данного технического решения является отсутствие аппаратуры управления многоканальным гидроприводом винтового летательного аппарата, ее структурного построения и исключения или минимизации взаимовлияния каналов гидропривода, что не позволяет получить требуемое качество управления летательным аппаратом, а также обеспечить его надежную работу. К недостатку такого решения можно отнести нерезервированный источник гидравлического питания, что является насущной необходимостью летательного аппарата.
Технической задачей изобретения является создание мультироторной летающей платформы с гидроприводом вращения несущих винтов, обладающей эффективной управляемостью, обеспечивающая устойчивый полет, имеющей минимальные массогабаритные характеристики, а также возможность применения любого числа несущих винтов с широким диапазоном тяговых характеристик.
Технический результат, обеспечивающий решение поставленной задачи, заключается в реализации мультироторной летающей платформы с гидроприводом вращения несущих винтов, содержащую систему управления с обратными связями, а также гидролинии в виде замкнутых контуров высокого и низкого давлений, к которым подключены регулируемые гидромоторы и регулируемые по давлению насосы, при этом каждый регулируемый гидромотор приводит во вращение несущий винт через редуктор, изменяет его скорость вращения, что в совокупности обеспечивает лучшие динамические характеристики.
Сущность изобретения заключается в том, что мультироторная летающая платформа с гидроприводом вращения несущих винтов содержит приводной двигатель, регулируемые насосы, гидролинии высокого и низкого давлений, регулируемые гидромоторы, каждый из которых приводит во вращение соответствующий ему несущий винт.
Мультироторная летающая платформа снабжена системой управления гидроприводом, состоящей из датчиков скорости вращения несущих винтов, датчика скорости вращения вала приводного двигателя, датчиков положения регулирующих органов регулируемых гидромоторов, датчика давления, установленного в гидролинии высокого давления и прибора управления гидроприводом, содержащего блок управления гидроприводом, блок управления приводным двигателем, блок управления регулируемыми насосами и блоки управления регулируемыми гидромоторами, при этом гидролинии высокого и низкого давлений выполнены в виде замкнутых контуров, к которым подключены регулируемые гидромоторы и через обратные клапаны регулируемые насосы, каждый из которых снабжен механизмом регулирования подачи подавлению, а каждый регулируемый гидромотор снабжен электрогидравлическим механизмом управления положением регулирующего органа.
Число регулируемых насосов и регулируемых гидромоторов может быть любым, но регулируемых гидромоторов должно быть не менее трех, а регулируемых насосов не менее одного, и определяется только необходимым расходом в гидролиниях и требованиями по надежности гидропривода, при числе регулируемых насосов более одного между приводным двигателем и регулируемыми насосами может быть установлена механическая передача.
В системе управления введена обратная связь по скорости вращения несущего винта, последняя измеряется датчиком скорости вращения несущего винта, сигнал с которого поступает в блок управления регулируемым гидромотором.
В системе управления введена обратная связь по скорости вращения вала приводного двигателя, последняя измеряется датчиком скорости вращения вала приводного двигателя, сигнал с которого поступает в блок управления гидроприводом.
В системе управления введена обратная связь по углу положения регулирующего органа регулируемого гидромотора, последний измеряется датчиком положения регулирующего органа гидромотора, сигнал с которого поступает в блок управления регулируемым гидромотором. В системе управления введена обратная связь по давлению в гидролинии высокого давления, последнее измеряется датчиком давления, сигнал с которого поступает в блок управления регулируемым насосом. В блок управления приводным двигателем введена корректирующая связь по скорости вращения вала приводного двигателя, формирующаяся в блоке управления регулируемым гидромотором и является разностью сигнала заданной скорости вращения несущего винта и сигнала датчика скорости вращения несущего винта, при этом корректирующая связь формируется по каждому несущему винту и поступает в блок управления приводным двигателем, где суммируется с сигналом заданной скорости вращения вала приводного двигателя.
Регулируемый гидромотор соединен с несущим винтом через редуктор. В гидролинии высокого давления установлен пневмогидравлический аккумулятор.
Изменение скорости вращения несущего винта осуществляется регулируемым гидромотором.
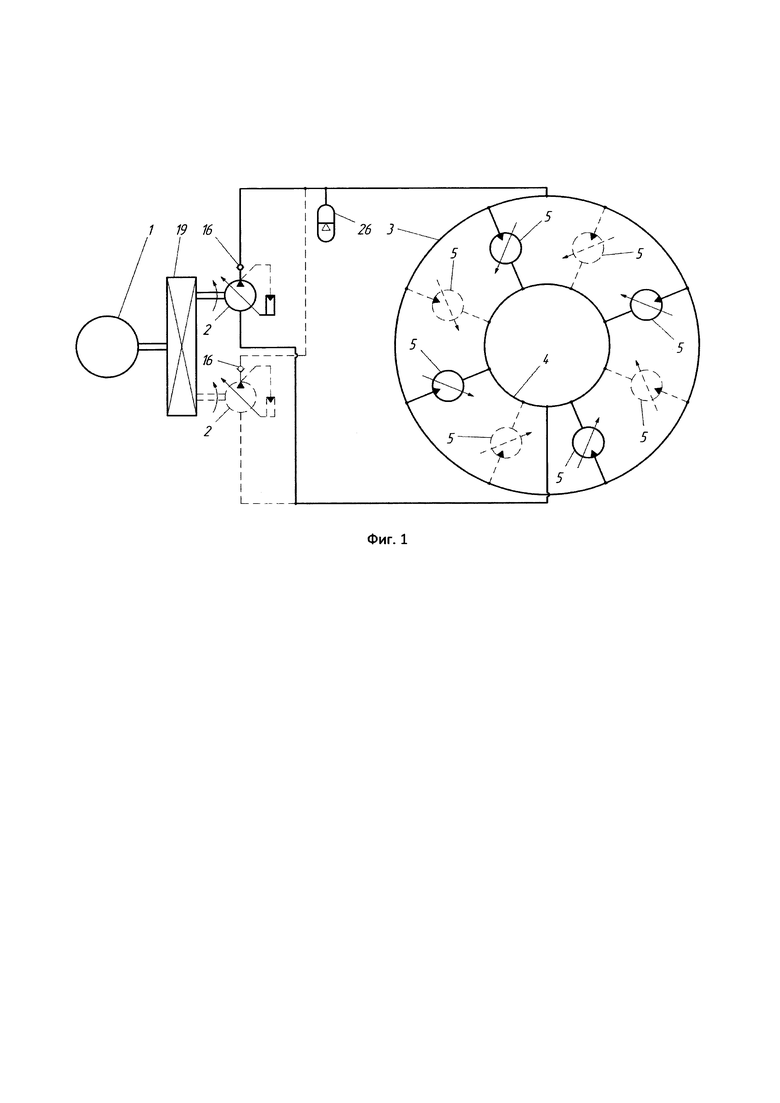
На фиг. 1 изображена схема гидравлическая функциональная мультироторной летающей платформы.
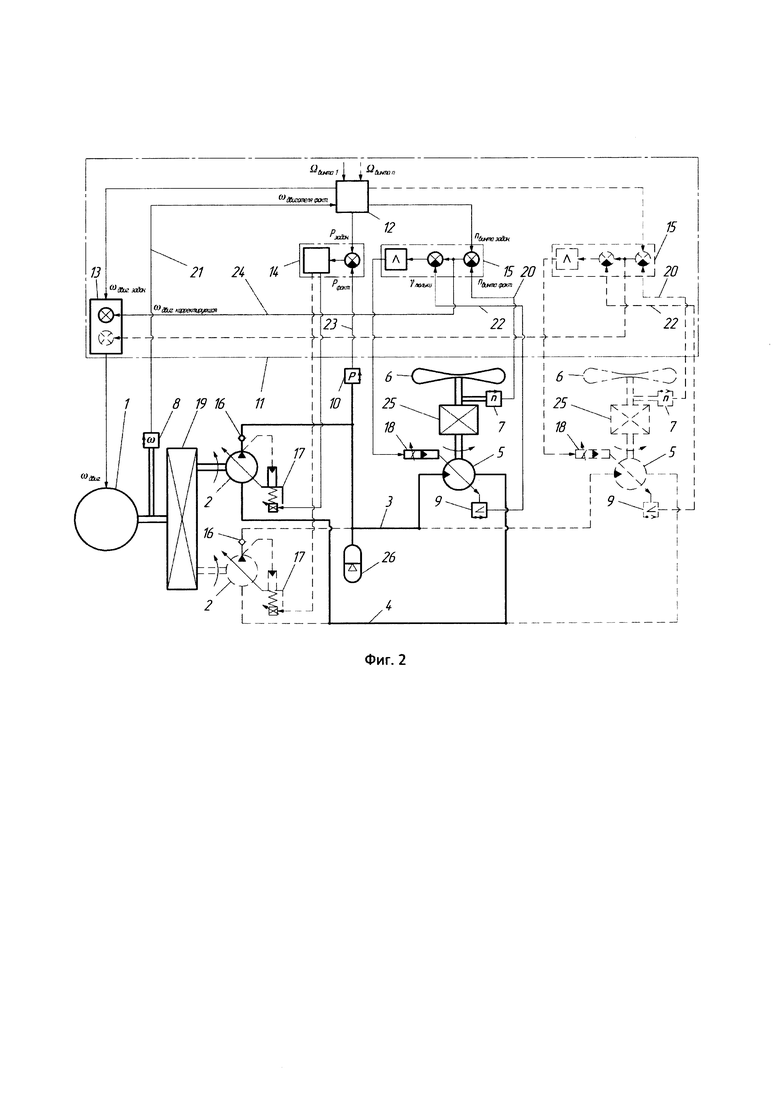
На фиг. 2 изображена схема электрогидравлическая функциональная мультироторной летающей платформы.
Мультироторная летающая платформа с гидроприводом вращения несущих винтов, содержит приводной двигатель 1, регулируемые насосы 2, гидролинии высокого 3 и низкого 4 давлений, регулируемые гидромоторы 5, каждый из которых приводит во вращение соответствующий ему несущий винт 6, систему управления гидроприводом, состоящей из датчиков скорости вращения несущих винтов 7, датчика скорости вращения вала приводного двигателя 8, датчиков положения регулирующих органов регулируемых гидромоторов 9, датчика давления 10, установленного в гидролинии высокого давления 3 и прибора управления гидроприводом 11, содержащего блок управления гидроприводом 12, блок управления приводным двигателем 13, блок управления регулируемыми насосами 14 и блоки управления регулируемыми гидромоторами 15, при этом гидролинии высокого 3 и низкого 4 давлений выполнены в виде замкнутых контуров, к которым подключены регулируемые гидромоторы 5 и через обратные клапаны 16 регулируемые насосы 2, что обеспечивает более равномерное питание регулируемых гидромоторов 5 путем постоянной циркуляции рабочей жидкости в этих контурах. Каждый регулируемый насос 2 снабжен механизмом регулирования подачи подавлению 17, а каждый регулируемый гидромотор 5 снабжен электрогидравлическим механизмом управления положением регулирующего органа 18. При этом число регулируемых насосов 2 и регулируемых гидромоторов 5 может быть любым, но регулируемых гидромоторов 5 должно быть не менее трех, а регулируемых насосов 2 не менее одного, и определяется только необходимым расходом в гидролиниях и требованиями по надежности гидропривода, при числе регулируемых насосов 2 более одного между приводным двигателем 1 и регулируемыми насосами 2 может быть установлена механическая передача 19.
В мультироторной летающей платформе введена обратная связь по скорости вращения несущего винта 20, последняя измеряется датчиком скорости вращения несущего винта 7, сигнал с которого поступает в блок управления регулируемым гидромотором 15.
В мультироторной летающей платформе введена обратная связь по скорости вращения вала приводного двигателя 21, последняя измеряется датчиком скорости вращения вала приводного двигателя 8, сигнал с которого поступает в блок управления гидроприводом 12.
В мультироторной летающей платформе введена обратная связь по углу положения регулирующего органа регулируемого гидромотора 22, последний измеряется датчиком положения регулирующего органа гидромотора 9, сигнал с которого поступает в блок управления регулируемым гидромотором 15.
В мультироторной летающей платформе введена обратная связь по давлению в гидролинии высокого давления 23, последнее измеряется датчиком давления 10, сигнал с которого поступает в блок управления регулируемым насосом 14.
В мультироторной летающей платформе введена в блок управления приводным двигателем 13 корректирующая связь по скорости вращения вала приводного двигателя 24, формирующаяся в блоке управления регулируемым гидромотором 15 и является разностью сигнала заданной скорости вращения несущего винта 6 и сигнала датчика скорости вращения несущего винта 7, при этом корректирующая связь формируется по каждому несущему винту 6 и поступает в блок управления приводным двигателем 13, где суммируется с сигналом заданной скорости вращения вала приводного двигателя 1.
Для минимизации влияния нагрузки от момента инерции несущего винта 6 на динамику работы регулирования скорости вращения регулируемого гидромотора 5 установлен редуктор 25, что уменьшает приведенный момент инерции нагрузки к валу регулируемого гидромотора 5 и как следствие уменьшает постоянную времени гидропривода, что в итоге улучшает качество управляемости летательного аппарата. Для улучшения динамики работы гидропривода путем стабилизации давления питания регулируемых гидромоторов 5 в гидролинии высокого давления 3 установлен пневмогидравлический аккумулятор 26.
Мультироторная летающая платформа с гидроприводом вращения несущих винтов работает следующим образом.
В блок управления гидроприводом 12 из системы управления мультироторной летающей платформы поступает сигнал управления по скорости вращения винтов Ω винта 1…Ω. винта n. Далее блок управления гидроприводом 12 подает сигнал в блок управления приводным двигателем 13 на установку постоянной номинальной скорости вращения вала приводного двигателя 1, которая контролируется обратной связью по скорости вращения вала приводного двигателя 21, с датчика скорости вращения вала приводного двигателя 8 сигнал поступает в блок управления гидроприводом 12.
Приводной двигатель 1 приводит во вращение механизм прямой передачи 19, который приводит во вращение регулируемые насосы 2. Управление регулируемым насосом 2 организовано по поддержанию заданного давления в гидролинии высокого давления 3, которое устанавливается блоком управления регулируемыми насосами 14 по заданному сигналу от блока управления гидроприводом 12. Далее сигнал с блока управления регулируемыми насосами 14 поступает на механизм регулирования подачи подавлению 17, величина последнего контролируется обратной связью по давлению в гидролинии высокого давления 23, с датчика давления 10 сигнал поступает в блок управления регулируемыми насосами 14.
В случае выхода из строя одного из регулируемых насосов 2, обратный клапан 16 автоматически отключает неисправный регулируемый насос 2 от гидролинии высокого давления 3, исключает падение давления в ней, обеспечивает сохранность работоспособности летательного аппарата за счет исправных регулируемых насосов 2 для совершения аварийной посадки путем компенсации недостающего расхода повышением скорости вращения вала приводного двигателя 1.
Вращение и регулирование скорости вращения несущего винта 6 осуществляется регулируемым гидромотором 5. Управление скоростью вращения регулируемого гидромотора 5 осуществляется блоком управления регулируемым гидромотором 15 по сигналу от блока управления гидроприводом 12. Скорость вращения каждого несущего винта 6 задается системой управления полетом и поступает в блок управления гидроприводом 12.
Необходимая динамика работы гидравлического привода обеспечивается наличием обратной связи по положению регулирующего органа регулируемого гидромотора 22, где сигнал с датчика положения регулирующего органа гидромотора 9 поступает в блок управления регулируемым гидромотором 15.
Управление отработкой заданной скорости вращения несущего винта 6 блоком управления гидроприводом 12 осуществляется в блоке управления регулируемым гидромотором 15 с использованием обратной связи по скорости вращения несущего винта 20, получаемой с датчика скорости вращения вала несущего винта 7, сигнал которого поступает в блок управления регулируемым гидромотором 15, где так же формируется корректирующая связь по скорости вращения вала приводного двигателя 24, поступающая с блока управления регулируемым гидромотором 15 в блок управления приводным двигателем 13, где совместно с управляющим сигналом скорости вращения вала приводного двигателя формируется сигнал управления скоростью вращения вала приводного двигателя 1.
Предлагаемая мультироторная летающая платформа с гидроприводом вращения несущих винтов обеспечивает качественную управляемость летательным аппаратом, улучшение динамики работы, повышение КПД и надежности, минимальные массогабаритные характеристики, позволяет расширить функциональные возможности летательного аппарата и применение несущих винтов с широким диапазоном тяговых характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕКУПЕРАЦИИ ЭНЕРГИИ ГИДРОПРИВОДА ПОВОРОТНОЙ ПЛАТФОРМЫ ЭКСКАВАТОРА | 2016 |
|
RU2618154C1 |
| ГИДРОПРИВОД МНОГОВИНТОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2808657C1 |
| Сегментный затвор с гидравлическим приводом | 2022 |
|
RU2810327C1 |
| Способ управления стабилизирующим объемным гидроприводом синхронного генератора автономной электроустановки | 1988 |
|
SU1646037A1 |
| Гибридная мультироторная летающая платформа | 2019 |
|
RU2710968C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554152C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2010 |
|
RU2425257C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2014 |
|
RU2561254C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2008 |
|
RU2369789C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554153C1 |
Изобретение относится к области авиации, в частности к конструкциям многовинтовых летательных аппаратов. Мультироторная летающая платформа содержит приводной двигатель, гидролинии высокого и низкого давлений, выполненные в виде замкнутых контуров, к которым подключены регулируемые гидромоторы и через обратные клапаны регулируемые насосы. Каждый регулируемый насос снабжен механизмом регулирования подачи по давлению. Каждый регулируемый гидромотор снабжен электрогидравлическим механизмом управления положением регулирующего органа и приводит во вращение через редуктор соответствующий ему несущий винт. Изменение скорости вращения несущего винта осуществляется регулируемым гидромотором. Мультироторная летающая платформа снабжена системой управления гидроприводом, состоящей из прибора управления гидроприводом, датчиков скорости вращения несущих винтов, вращения вала приводного двигателя, датчиков положения регулирующих органов регулируемых гидромоторов и датчика давления в гидролинии высокого давления. Обеспечивается качественная управляемость летательным аппаратом, улучшение динамики работы, повышение КПД и надежности, минимальные массогабаритные характеристики. 8 з.п. ф-лы, 2 ил.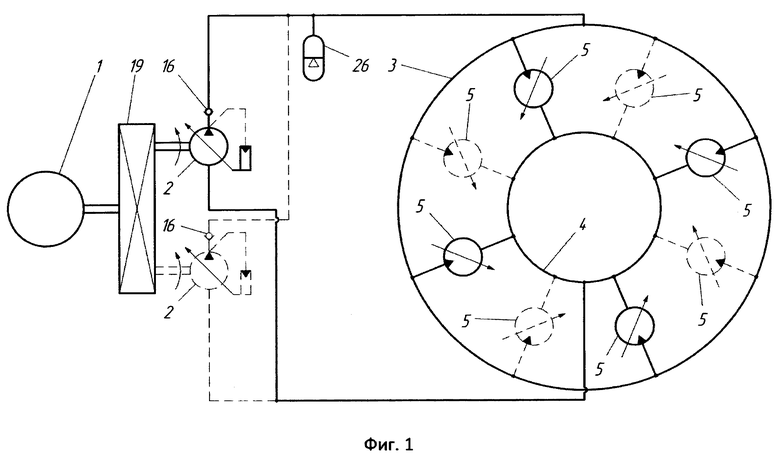
1. Мультироторная летающая платформа с гидроприводом вращения несущих винтов, содержащая приводной двигатель, регулируемые насосы, гидролинии высокого и низкого давлений, регулируемые гидромоторы, каждый из которых приводит во вращение соответствующий ему несущий винт, отличающаяся тем, что мультироторная летающая платформа снабжена системой управления гидроприводом, состоящей из датчиков скорости вращения несущих винтов, датчика скорости вращения вала приводного двигателя, датчиков положения регулирующих органов регулируемых гидромоторов, датчика давления, установленного в гидролинии высокого давления и прибора управления гидроприводом, содержащего блок управления гидроприводом, блок управления приводным двигателем, блок управления регулируемыми насосами и блоки управления регулируемыми гидромоторами, при этом гидролинии высокого и низкого давлений выполнены в виде замкнутых контуров, к которым подключены регулируемые гидромоторы и через обратные клапаны регулируемые насосы, каждый из которых снабжен механизмом регулирования подачи по давлению, а каждый регулируемый гидромотор снабжен электрогидравлическим механизмом управления положением регулирующего органа.
2. Мультироторная летающая платформа по п. 1, отличающаяся тем, что число регулируемых насосов и регулируемых гидромоторов может быть любым, но регулируемых гидромоторов должно быть не менее трех, а регулируемых насосов не менее одного, и определяется только необходимым расходом в гидролиниях и требованиями по надежности гидропривода, при числе регулируемых насосов более одного между приводным двигателем и регулируемыми насосами может быть установлена механическая передача.
3. Мультироторная летающая платформа по п. 1, отличающаяся тем, что введена обратная связь по скорости вращения несущего винта, последняя измеряется датчиком скорости вращения несущего винта, сигнал с которого поступает в блок управления регулируемым гидромотором.
4. Мультироторная летающая платформа по п. 1, отличающаяся тем, что введена обратная связь по скорости вращения вала приводного двигателя, последняя измеряется датчиком скорости вращения вала приводного двигателя, сигнал с которого поступает в блок управления гидроприводом.
5. Мультироторная летающая платформа по п. 1, отличающаяся тем, что введена обратная связь по углу положения регулирующего органа регулируемого гидромотора, последний измеряется датчиком положения регулирующего органа гидромотора, сигнал с которого поступает в блок управления регулируемым гидромотором.
6. Мультироторная летающая платформа по п. 1, отличающаяся тем, что введена обратная связь по давлению в гидролинии высокого давления, последнее измеряется датчиком давления, сигнал с которого поступает в блок управления регулируемым насосом.
7. Мультироторная летающая платформа по п. 1, отличающаяся тем, что введена в блок управления приводным двигателем корректирующая связь по скорости вращения вала приводного двигателя, формирующаяся в блоке управления регулируемым гидромотором и является разностью сигнала заданной скорости вращения несущего винта и сигнала датчика скорости вращения несущего винта, при этом корректирующая связь формируется по каждому несущему винту и поступает в блок управления приводным двигателем, где суммируется с сигналом заданной скорости вращения вала приводного двигателя.
8. Мультироторная летающая платформа по п. 1, отличающаяся тем, что регулируемый гидромотор соединен с несущим винтом через редуктор.
9. Мультироторная летающая платформа по п. 1, отличающаяся тем, что в гидролинии высокого давления установлен пневмогидравлический аккумулятор.
| ЖАРОСТОЙКИЙ ПРОВОДНИК | 1962 |
|
SU205086A1 |
| US 20230020058 A1, 19.01.2023 | |||
| 0 |
|
SU181367A1 | |
| WO 2016068767 A1, 06.05.2016 | |||
| US 11084576 B2, 10.08.2021 | |||
| КВАДРОКОПТЕР С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ НЕСУЩИХ ВИНТОВ С ФИКСИРОВАННЫМ ШАГОМ ЛОПАСТЕЙ | 2020 |
|
RU2732305C1 |

