ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к устройству управления выходной характеристикой для двигателя внутреннего сгорания.
УРОВЕНЬ ТЕХНИКИ, К КОТОРОМУ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
В устройстве управления транспортным средством, раскрытом в JP 2008-233110A, таблица (здесь и далее именуемая как «таблица выходной характеристики»), связывающая величину нажатия педали акселератора (здесь и далее именуемую как «величина манипуляции акселератора») с открытием дроссельной заслонки (здесь и далее именуемым как «открытие дросселя») сохранена заранее, и управление открытием дросселя осуществляется на основании величины манипуляции акселератора посредством обращения к данной таблице выходной характеристики. Две таблицы, т.е. таблица для нормального движения и таблица для движения при медленном движении транспорта, сохранены заранее в качестве таблиц выходной характеристики, и переключение таблицы выходной характеристики, к которой должно происходить обращение, осуществляется в соответствии с эпизодом движения. Таблица для движения при медленном движении транспорта задана таким образом, что значение открытия дросселя, соответствующего величине манипуляции акселератора, меньше чем в таблице для нормального движения. Таким образом, управляемость и экономия топлива во время движения при медленном движении транспорта были улучшены посредством уменьшения выходной характеристики двигателя внутреннего сгорания во время движения при медленном движении транспорта, чем во время нормального движения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Во время нормального движения водитель обычно увеличивает скорость транспортного средства до 60 [км/ч], если ограничение скорости дороги, по которой движется транспортное средство, меняется с 40 [км/ч] до 60 [км/ч]. Тем не менее, в случае, когда водитель не обладает достаточной техникой вождения, тонкая манипуляция акселератора не может быть выполнена при регулировании скорости транспортного средства, и педаль акселератора может быть нажата чрезмерно, так что превышается ограничение скорости. Если это происходит, то педаль акселератора возвращается для уменьшения скорости транспортного средства после того, как превышено ограничение скорости, что приводит к тому, что выполняется ненужное ускорение и, следовательно, ухудшается экономия топлива.
Соответственно, существует проблема, связанная с тем, что экономия топлива имеет тенденцию к ухудшению в зависимости от техники вождения водителя, если управление осуществляется по уменьшению выходной характеристики двигателя внутреннего сгорания только во время движения при медленном движении транспорта, как в описанном выше обычном устройстве управления транспортным средством.
Настоящее изобретение было разработано с учетом такой проблемы и его цель заключается в устранении ухудшения экономии топлива из-за различий в технике вождения между водителями посредством правильного управления выходной характеристикой двигателя внутреннего сгорания в соответствии с эпизодом движения и условием вождения транспортного средства.
Для достижения вышеприведенной цели, в соответствии с одним аспектом настоящего изобретения, предоставлено устройство управления выходной характеристикой для двигателя внутреннего сгорания, которое обнаруживает внешние условия движения транспорта по дорогам, в которых движется собственное транспортное средство, вычисляет рекомендуемую скорость транспортного средства у собственного транспортного средства в обнаруженных внешних условиях движения транспорта по дорогам, задает целевую выходную характеристику двигателя внутреннего сгорания таким образом, что выходной параметр двигателя внутреннего сгорания, соответствующий величине манипуляции акселератора, уменьшается по мере уменьшения разности скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства и меняет выходную характеристику двигателя внутреннего сгорания на целевую выходную характеристику.
В частности, в настоящей заявке раскрыто устройство управления выходной характеристикой для управления выходной характеристикой двигателя внутреннего сгорания, установленного на транспортном средстве, содержащее: блок обнаружения внешних условий движения транспорта по дорогам, выполненный с возможностью обнаружения внешних условий движения транспорта по дорогам, в которых движется собственное транспортное средство; блок вычисления рекомендуемой скорости транспортного средства, выполненный с возможностью вычисления рекомендуемой скорости транспортного средства у собственного транспортного средства в обнаруженных внешних условиях движения транспорта по дорогам; блок задания целевой выходной характеристики, выполненный с возможностью уменьшения выходного параметра двигателя внутреннего сгорания, соответствующего величине манипуляции акселератора по мере того как уменьшается разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства, и задания целевой выходной характеристики двигателя внутреннего сгорания до такой выходной характеристики, которая приемлема для постоянного движения с рекомендуемой скоростью транспортного средства, когда разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства становится по существу равной нулю; и блок изменения выходной характеристики, выполненный с возможностью изменения выходной характеристики двигателя внутреннего сгорания на целевую выходную характеристику.
В дополнительном аспекте устройство управления выходной характеристикой для двигателя внутреннего сгорания дополнительно содержит блок определения ускорения, выполненный с возможностью определения того, имеет или нет водитель намерение ускорить транспортное средство на основании манипуляции акселератора; и блок коррекции во время ускорения, выполненный с возможностью коррекции целевой выходной характеристики двигателя внутреннего сгорания до такой характеристики, что выходной параметр двигателя внутреннего сгорания, соответствующий величине манипуляции акселератора, становится относительно большим, когда определяется, что водитель имеет намерение ускорить транспортное средство.
В другом дополнительном аспекте блок коррекции во время ускорения завершает коррекцию, когда скорость транспортного средства увеличилась на предварительно определенную скорость транспортного средства, истекло предварительно определенное время или транспортное средство прошло предварительно определенное расстояние после того, как определено, что есть намерение ускорить транспортное средство.
В еще одном дополнительном аспекте блок изменения выходной характеристики меняет выходную характеристику двигателя внутреннего сгорания на целевую выходную характеристику таким образом, что скорость реакции двигателя внутреннего сгорания, соответствующая величине манипуляции акселератора, становится относительно высокой, когда определено, что водитель имеет намерение ускорить транспортное средство.
В еще одном дополнительном аспекте устройство управления выходной характеристикой для двигателя внутреннего сгорания дополнительно содержит блок коррекции уклона, выполненный с возможностью коррекции целевой выходной характеристики двигателя внутреннего сгорания таким образом, что выходной параметр двигателя внутреннего сгорания, соответствующий величине манипуляции акселератора, увеличивается с увеличением уклона дороги.
В еще одном дополнительном аспекте блок изменения выходной характеристики меняет выходную характеристику двигателя внутреннего сгорания на его целевую выходную характеристику, когда величина манипуляции акселератора становится больше величины манипуляции акселератора, когда была задана целевая выходная характеристика, если целевая выходная характеристика двигателя внутреннего сгорания является характеристикой для того, чтобы сделать выходной параметр двигателя внутреннего сгорания, соответствующий величине манипуляции акселератора, больше текущей выходной характеристики.
В еще одном дополнительном аспекте блок изменения выходной характеристики постепенно меняет выходную характеристику двигателя внутреннего сгорания на целевую выходную характеристику.
В еще одном дополнительном аспекте устройство управления выходной характеристикой для двигателя внутреннего сгорания дополнительно содержит блок коррекции уклона вниз, выполненный с возможностью коррекции целевой выходной характеристики двигателя внутреннего сгорания для уменьшения выходного параметра двигателя внутреннего сгорания, соответствующего величине манипуляции акселератора, по мере того как уклон вниз становится круче, когда уклон дороги становится равным или меньше предварительно определенного уклона вниз.
В еще одном дополнительном аспекте блок коррекции уклона вниз корректирует целевую выходную характеристику двигателя внутреннего сгорания таким образом, что выходной параметр двигателя внутреннего сгорания является предварительно определенным выходным параметром, незначительно выше выходного параметра, который необходим для сохранения состояния холостого хода, когда величина манипуляции акселератора не больше предварительно определенной первой величины манипуляции.
В еще одном дополнительном аспекте устройство управления выходной характеристикой для двигателя внутреннего сгорания дополнительно содержит блок управления передаточным отношением, выполненный с возможностью уменьшения передаточного отношения, когда педаль акселератора нажимается в состоянии, где транспортное средство движется под уклон по дороге, чей уклон не больше уклона вниз, при этом блок коррекции уклона вниз корректирует целевую выходную характеристику двигателя внутреннего сгорания таким образом, что выходной параметр двигателя внутреннего сгорания становится равным нулю, когда величина манипуляции акселератора не больше предварительно определенной второй величины манипуляции, которая меньше первой величины манипуляции.
В еще одном дополнительном аспекте Устройство управления выходной характеристикой для двигателя внутреннего сгорания дополнительно содержит блок вычисления запрашиваемого ускорения, выполненный с возможностью вычисления ускорения, запрашиваемого водителем в соответствии с величиной манипуляции акселератора, при этом блок задания целевой выходной характеристики задает целевую выходную характеристику двигателя внутреннего сгорания на основании запрашиваемого ускорения, когда работают указатели поворота.
В еще одном дополнительном аспекте устройство управления выходной характеристикой для двигателя внутреннего сгорания дополнительно содержит блок вычисления запрашиваемого ускорения, выполненный с возможностью вычисления ускорения, запрашиваемого водителем, в соответствии с величиной манипуляции акселератора, при этом блок задания целевой выходной характеристики задает целевую выходную характеристику двигателя внутреннего сгорания на основании запрашиваемого ускорения, когда величина манипуляции акселератора не меньше предварительно определенной величины манипуляции при обгоне.
Кроме того, в настоящей заявке раскрыто устройство управления выходной характеристикой для управления выходной характеристикой двигателя внутреннего сгорания, установленного на транспортном средстве, содержащее: блок обнаружения внешних условий движения транспорта по дорогам, выполненный с возможностью обнаружения внешних условий движения транспорта по дорогам, в которых движется собственное транспортное средство; блок вычисления рекомендуемой скорости транспортного средства, выполненный с возможностью вычисления рекомендуемой скорости транспортного средства у собственного транспортного средства в обнаруженных внешних условиях движения транспорта по дорогам; блок задания целевой выходной характеристики, выполненный с возможностью уменьшения выходного параметра двигателя внутреннего сгорания, соответствующего величине манипуляции акселератора по мере того, как уменьшается разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства, и задания целевой выходной характеристики двигателя внутреннего сгорания до такой выходной характеристики, которая приемлема для постоянного движения с рекомендуемой скоростью транспортного средства, когда разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства становится меньше; и блок изменения выходной характеристики, выполненный с возможностью изменения выходной характеристики двигателя внутреннего сгорания на целевую выходную характеристику.
Варианты осуществления и преимущества данного изобретения будут подробно описаны ниже со ссылкой на прилагаемые фигуры.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 является принципиальной схемой конфигурации устройства управления выходной характеристикой для двигателя внутреннего сгорания с искровым зажиганием в соответствии с первым вариантом осуществления настоящего изобретения,
Фиг. 2 является блок-схемой последовательности операций, показывающей управление выходной характеристикой двигателя в соответствии с первым вариантом осуществления настоящего изобретения,
Фиг. 3 является блок-схемой последовательности операций, показывающей процесс задания базовой выходной характеристики в соответствии с первым вариантом осуществления настоящего изобретения,
Фиг. 4 является картой для вычисления рекомендованного ускорения на основании разности скорости транспортного средства и фактической скорости транспортного средства,
Фиг. 5 является таблицей для вычисления ускорения с экономией топлива на основании фактической скорости транспортного средства,
Фиг. 6 является графиком, показывающим базовую таблицу выходной характеристики,
Фиг. 7 является блок-схемой последовательности операций, показывающей процесс коррекции ускорения в соответствии с первым вариантом осуществления настоящего изобретения,
Фиг. 8 является блок-схемой последовательности операций, показывающей процесс коррекции уклона в соответствии с первым вариантом осуществления настоящего изобретения,
Фиг. 9 является блок-схемой последовательности операций, показывающей процесс изменения выходной характеристики в соответствии с первым вариантом осуществления настоящего изобретения,
Фиг. 10 является временной диаграммой, показывающей операцию управления выходной характеристикой в соответствии с первым вариантом осуществления настоящего изобретения,
Фиг. 11 является временной диаграммой, показывающей операцию управления выходной характеристикой в соответствии с первым вариантом осуществления настоящего изобретения,
Фиг. 12 является блок-схемой последовательности операций, показывающей процесс задания базовой выходной характеристики в соответствии со вторым вариантом осуществления настоящего изобретения,
Фиг. 13 является картой для вычисления рекомендуемого приращения ускорения на основании разности скорости транспортного средства и фактической скорости транспортного средства,
Фиг. 14 является таблицей для вычисления приращения ускорения с экономией топлива на основании фактической скорости транспортного средства,
Фиг. 15 является таблицей для вычисления приращения при сохранении скорости транспортного средства, на основании фактической скорости транспортного средства,
Фиг. 16 является блок-схемой последовательности операций, показывающей процесс коррекции уклона в соответствии со вторым вариантом осуществления настоящего изобретения,
Фиг. 17 является блок-схемой последовательности операций, показывающей процесс изменения выходной характеристики в соответствии со вторым вариантом осуществления настоящего изобретения,
Фиг. 18 является графиком, показывающим способ для задания таблицы целевой выходной характеристики в соответствии со вторым вариантом осуществления настоящего изобретения,
Фиг. 19 является блок-схемой последовательности операций, показывающей процесс коррекции уклона в соответствии с третьим вариантом осуществления настоящего изобретения,
Фиг. 20 является графиком, показывающим таблицу выходной характеристики для уклона вниз в соответствии с третьим вариантом осуществления настоящего изобретения,
Фиг. 21 является блок-схемой последовательности операций, показывающей процесс изменения выходной характеристики в соответствии с третьим вариантом осуществления настоящего изобретения,
Фиг. 22 является временной диаграммой, показывающей операцию управления выходной характеристикой в соответствии с третьим вариантом осуществления настоящего изобретения,
Фиг. 23 является графиком, показывающим таблицу выходной характеристики для уклона вниз в соответствии с четвертым вариантом осуществления настоящего изобретения,
Фиг. 24 является временной диаграммой, показывающей операцию управления выходной характеристикой в соответствии с четвертым вариантом осуществления настоящего изобретения, и
Фиг. 25 является блок-схемой последовательности операций, показывающей процесс задания базовой выходной характеристики в соответствии с пятым вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
(Первый Вариант Осуществления)
Фиг. 1 является принципиальной схемой конфигурации устройства 100 управления выходной характеристикой для двигателя 1 внутреннего сгорания с искровым зажиганием (здесь и далее именуемый как «двигатель») в соответствии с одним вариантом осуществления настоящего изобретения.
Устройство 100 управления выходной характеристикой двигателя 1 включает в себя двигатель 1 для формирования движущей силы транспортного средства, впускной тракт 2, по которому протекает воздух, всасываемый в двигатель 1 (здесь и далее именуемый как «всасываемый воздух»), выпускной тракт 3, по которому протекают газообразные продукты сгорания, выпускаемые из двигателя 1 (здесь и далее именуемые как «отработавший воздух»), устройство 4 навигации и контроллер 5.
Двигатель 1 включает в себя блок 11 цилиндров и головку 12 цилиндров.
Блок 11 цилиндров включает в себя часть 11a цилиндров и часть 11b картера двигателя.
Часть 11a цилиндров формируется множеством цилиндров 110. Поршень 111, который совершает возвратно-поступательное движение в цилиндре 110 под давлением сгорания, размещается в цилиндре 110.
Часть 11b картера двигателя сформирована ниже части 11a цилиндров. Часть 11b картера двигателя поддерживает с возможностью вращения коленчатый вал 112. Коленчатый вал 112 преобразует возвратно-поступательное движение поршня 111 во вращательное движение через шатун 113.
Головка 12 цилиндров размещается на верхней поверхности блока 11 цилиндров и образует часть камеры 13 сгорания совместно с цилиндром 110 и поршнем 111.
Головка 12 цилиндров предусмотрена с впускным каналом 120, который соединен с впускным трактом 2 и открывается на верхней стенке камеры 13 сгорания, выпускным каналом 121, который соединен с выпускным трактом 3 и открывается на верхней стенке камеры 13 сгорания, и предусмотрена свеча 122 зажигания, выходящая из центра верхней стенки камеры 13 сгорания. Головка 12 цилиндров также предусмотрена с впускным клапаном 123 для открытия и закрытия отверстия между камерой 13 сгорания и впускным каналом 120 и выпускным клапаном 124 для открытия и закрытия отверстия между камерой 13 сгорания и выпускным каналом 121. Головка 12 цилиндров, кроме того, предусмотрена с впускным распределительным валом 125 для привода впускного клапана 123 для открытия и закрытия и выпускным распределительным валом 126 для привода выпускного клапана 124 для открытия и закрытия.
Воздушный фильтр 21, расходомер 22 воздуха, электрически управляемая дроссельная заслонка 23, впускной коллектор 24 и клапан 25 впрыска топлива последовательно предоставлены со стороны впуска во впускном тракте 2.
Воздушный фильтр 21 удаляет посторонние вещества, такие как песок, включенные во всасываемый воздух.
Расходомер 22 воздуха обнаруживает расход всасываемого воздуха (здесь и далее именуемый как «объем всасываемого воздуха»).
Дроссельная заслонка 23 регулирует объем всасываемого воздуха, поступающего во впускной коллектор 24 посредством изменения площади поперечного сечения тракта впускного тракта непрерывно или ступенчато. Дроссельная заслонка 23 приводится для открытия и закрытия посредством привода 26 дросселя. Открытие дросселя обнаруживается датчиком 27 дросселя.
Впускной коллектор 24 в равной степени распределяет воздух, который в него поступает, в каждый цилиндр 110.
Клапан 25 впрыска топлива впрыскивает топливо в направлении впускного канала 120 в соответствии с рабочим состоянием двигателя 1.
Трехкомпонентный катализатор 31 для удаления токсичных веществ, таких как углеводороды и оксиды азота, в отработавшем воздухе предусмотрен в выпускном тракте 3.
Устройство 4 навигации включает в себя блок 41 обнаружения позиции собственного транспортного средства, запоминающий блок 42 и блок 43 связи.
Блок 41 обнаружения позиции собственного транспортного средства обнаруживает позицию собственного транспортного средства посредством приема радиоволн от спутника GPS посредством датчика 411 GPS (Глобальная Система Позиционирования). Кроме того, направление движения и высота над уровнем моря транспортного средства вычисляются на основании значений обнаружения датчика 412 3D гироскопа.
Информация карты, включающая в себя дороги и здания на дороге, хранится в запоминающем блоке 42. В частности, хранится информация, такая как ширина и количество полос движения дороги, уклоны, ограничения скорости, наличие или отсутствие светофоров и железнодорожных переездов, радиусы кривизны поворотов, перекрестки и пункты сбора дорожной пошлины.
Блок 43 связи принимает посредством приемника информацию о движении транспорта по дорогам, передаваемую из центра системы передачи информации о движении транспорта по дорогам.
Фрагменты информации, такие как позиция собственного транспортного средства, информация карты и информация движения транспорта по дорогам, получаемые устройством 4 навигации, собирательно именуются как информация навигации.
Контроллер 5 сформирован посредством микрокомпьютера, включающего в себя центральный блок обработки (CPU), постоянное запоминающее устройство (ROM), запоминающее устройство с произвольной выборкой (RAM) и интерфейс ввода/вывода (интерфейс I/O). Устройство 4 навигации и контроллер 5 соединены с линией 50 связи CAN (Локальная Сеть Контроллеров) и передают и принимают данные к и от друг друга посредством связи по протоколу CAN.
На контроллер 5 подаются сигналы от различных датчиков, таких как датчик 51 скорости вращения двигателя для обнаружения скорости вращения двигателя на основании положения коленчатого вала, датчик 52 хода акселератора для обнаружения величины манипуляции акселератора, датчик 53 скорости транспортного средства для обнаружения скорости собственного транспортного средства (скорость собственного транспортного средства) и датчик 54 расстояния между транспортными средствами для обнаружения расстояния между транспортными средствами между собственным транспортным средством и впереди идущим транспортным средством посредством излучения миллиметровых волн с передней стороны собственного транспортного средства и приема миллиметровых волн, отраженных впереди идущим транспортным средством в дополнение к сигналам от датчика 27 дросселя и устройства 4 навигации, описанным выше.
Контроллер 5 соответствующим образом меняет выходную характеристику двигателя 1 на основании этих сигналов. В частности, соответствующим образом меняется значение открытия дросселя, соответствующего величине манипуляции акселератора. Ниже описывается управление выходной характеристикой двигателя 1 в соответствии с данным вариантом осуществления.
Фиг. 2 является блок-схемой последовательности операций, показывающей управление выходной характеристикой двигателя 1 в соответствии с настоящим вариантом осуществления. Контроллер 5 исполняет эту процедуру в предварительно определенном цикле вычисления (например, 10 [мс]).
На Этапе S1 контроллер 5 выполняет процесс задания базовой выходной характеристики для задания выходной характеристики двигателя 1 до характеристики, при которой транспортное средство легко движется с рекомендованной скоростью транспортного средства, которая будет описана позже (здесь и далее именуемая как «базовая выходная характеристика»). Процесс задания базовой выходной характеристики более подробно описывается позже со ссылкой на Фиг. 3-6.
На этапе S2 контроллер 5 выполняет процесс коррекции ускорения. Процесс коррекции ускорения является процессом для коррекции выходной характеристики двигателя 1 до характеристики, приемлемой, например, при пуске или во время внезапного ускорения, когда педаль акселератора нажимается с твердым намерением ускориться. Процесс коррекции ускорения подробно описывается позже со ссылкой на Фиг. 7.
На этапе S3 контроллер 5 выполняет процесс коррекции уклона. Процесс коррекции уклона является процессом для коррекции выходной характеристики двигателя 1 до характеристики, приемлемой для уклона дороги, по которой в текущий момент движется собственное транспортное средство. Процесс коррекции уклона подробно описывается позже со ссылкой на Фиг. 8.
На Этапе S4 контроллер 5 выполняет процесс изменения выходной характеристики. Процесс изменения выходной характеристики является процессом для задания целевой выходной характеристики на основании результата каждого процесса на Этапах с S1 по S3 и изменения выходной характеристики двигателя 1 на целевую выходную характеристику. Процесс изменения выходной характеристики подробно описывается позже со ссылкой на Фиг. 9.
Фиг. 3 является блок-схемой последовательности операций, показывающей процесс задания основной выходной характеристики.
На этапе S11 контроллер 5 обнаруживает внешние условия дороги, по которой в текущий момент движется собственное транспортное средство (здесь и далее именуемые как «внешние условия движения транспорта по дорогам»), такие как форма и ограничение скорости дороги, по которой в текущий момент осуществляется движение, относительное взаимное положение с окружающими транспортными средствами, степень транспортного затора и наличие или отсутствие светофора на основании информации навигации и расстояний между транспортными средствами.
На Этапе S12 контроллер 5 вычисляет рекомендуемую скорость транспортного средства, с которой собственное транспортное средство может комфортно и с экономией топлива осуществлять движение, на основании внешних условий движения транспорта по дорогам.
Например, когда транспортное средство движется по дороге, на которой установлено ограничение скорости 40 [км/ч], то рекомендуемая скорость транспортного средства, как правило, задается равной 40 [км/ч], если расстояние между транспортными средствами до идущего впереди транспортного средства достаточное и данная дорога прямая. Если ограничение скорости переключается с 40 [км/ч] до 60 [км/ч], в то время как транспортное средство движется при таких условиях, то рекомендуемая скорость транспортного средства, как правило, задается равной 60 [км/ч].
С другой стороны, если расстояние между транспортными средствами до впереди идущего транспортного средства недостаточное, то рекомендуемая скорость транспортного средства соответствующим образом задается равной скорости транспортного средства, которая ниже ограничения скорости в соответствии с расстоянием между транспортными средствами. Также, когда дорога изогнута, то рекомендуемая скорость соответствующим образом задается равной скорости транспортного средства, которая ниже ограничения скорости в соответствии с радиусом кривизны данной дороги. Рекомендуемая скорость также соответствующим образом задается равной скорости транспортного средства ниже ограничения скорости, как например, когда впереди присутствует светофор или перекресток или когда транспортное средство застряло в транспортном заторе. Таким образом, рекомендуемая скорость транспортного средства соответствующим образом задается в соответствии с внешними условиями движения транспорта по дорогам.
В настоящем варианте осуществления управление выходной характеристикой двигателя 1 осуществляется до такой характеристики, при которой скорость собственного транспортного средства легко сводится к данной рекомендуемой скорости транспортного средства. Т.е. управление выходной характеристикой двигателя 1 выполняется до характеристики, при которой транспортное средство легко движется с рекомендуемой скоростью транспортного средства.
На этапе S13 контроллер 5 вычисляет разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства.
На этапе S14 контроллер 5 вычисляет ускорение, приемлемое для ускорения собственного транспортного средства до рекомендуемой скорости транспортного средства (здесь и далее именуемое как «рекомендуемое ускорение») на основании разности скорости транспортного средства и скорости собственного транспортного средства, посредством обращения к карте на Фиг. 4, которая определена экспериментально или подобным образом заранее. Как показано на карте на Фиг. 4, рекомендуемое ускорение уменьшается по мере уменьшения разности скорости транспортного средства, т.е. по мере того, как скорость собственного транспортного средства достигает рекомендуемой скорости транспортного средства. Кроме того, рекомендуемое ускорение выше, когда скорость собственного транспортного средства низкая, чем когда скорость собственного транспортного средства высокая.
На Этапе S15 контроллер 5 вычисляет ускорение, приемлемое для ускорения с экономией топлива собственного транспортного средства (здесь и далее именуемое как «ускорение с экономией топлива») на основании скорости собственного транспортного средства посредством обращения к таблице на Фиг. 5, которая определена экспериментально или подобным образом заранее. Как показано в таблице на Фиг. 5, ускорение с экономией топлива постоянно до тех пор, пока скорость собственного транспортного средства не достигает предварительно определенной скорости транспортного средства и постепенно уменьшается после того как скорость собственного транспортного средства превышает предварительно определенную скорость транспортного средства.
На Этапе S16 контроллер 5 вычисляет ускорение, запрашиваемое водителем (здесь и далее именуемое как «запрашиваемое ускорение») на основании величины манипуляции акселератора и скорости собственного транспортного средства, обращаясь к карте, которая определена экспериментально или подобным образом заранее.
На Этапе S17 контроллер 5 вычисляет базовое целевое ускорение. В частности, сравниваются рекомендуемое ускорение и ускорение с экономией топлива, и меньшее задается в качестве предварительного целевого ускорения. Затем сравниваются предварительное целевое ускорение и запрашиваемое ускорение, и большее задается в качестве базового целевого ускорения.
На Этапе S18 контроллер 5 задает оптимальную таблицу в качестве таблицы базовой выходной характеристики из множества таблиц выходной характеристики (таблиц, связывающих величину манипуляции акселератора и открытие дросселя) на основании базового целевого ускорения. В частности, таблица базовой выходной характеристики задается на основании базового целевого ускорения таким образом, что, чем выше базовое целевое ускорение, тем больше значение открытия дросселя, соответствующего величине манипуляции акселератора.
Фиг. 6 является графиком, показывающим таблицу базовой выходной характеристики. Штрихпунктирная линия на Фиг. 6 является опорной линией, на которой отношение открытия дросселя к величине манипуляции акселератора составляет 1 к 1, т.е. открытие дросселя равно нулю (полностью закрыт), если величина манипуляции акселератора равна нулю, открытие дросселя составляет половину, если величина манипуляции акселератора составляет половину, и открытие дросселя максимально (полностью открыт), если величина манипуляции акселератора максимальна. Открытие дросселя, вычисленное в соответствии с данной опорной линией, именуется ниже как опорное открытие.
Если разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства относительно большая, то таблица базовой выходной характеристики задается таким образом, что значение открытия дросселя, соответствующего величине манипуляции акселератора, больше опорного открытия, как показано сплошной линией A. Это потому, что предполагается, что требуется значительная сила ускорения для достижения рекомендуемой скорости транспортного средства, если разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства относительно большая.
По мере того как разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства становится относительно небольшой, таблица базовой выходной характеристики задается таким образом, что значение открытия дросселя, соответствующего величине манипуляции акселератора, становится постепенно меньше, как показано сплошной линией B или C.
Следует отметить, что сплошная линия B показывает пример таблицы базовой выходной характеристики заданной, когда разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства становится относительно небольшой и умеренная сила ускорения требуется для достижения рекомендуемого ускорения. Сплошная линия C показывает пример таблицы базовой выходной характеристики заданной, когда разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства становится по существу равной нулю, и представляет собой выходную характеристику, приемлемую для постоянной скорости движения с рекомендуемой скоростью транспортного средства.
Поскольку сила ускорения может быть постепенно уменьшена по мере того как скорость собственного транспортного средства достигает рекомендуемой скорости транспортного средства, то посредством этого скорость собственного транспортного средства может более просто и естественно сводиться к рекомендуемой скорости транспортного средства. Т.е., поскольку скорость собственного транспортного средства может легко сводиться к рекомендуемой скорости транспортного средства, не требуя от водителя тонкой манипуляции акселератора, то вариация эффекта экономии топлива из-за отличий в технике вождения может быть устранена.
Фиг. 7 является блок-схемой последовательности операций, показывающей процесс коррекции ускорения.
На Этапе S21 контроллер 5 определяет, равен или нет флаг коррекции ускорения 1. Флаг коррекции ускорения является флагом, который задается равным 1, когда выполняется коррекция ускорения, и задается равным 0, когда коррекция ускорения не выполняется, и задан равным 0 в исходном состоянии. Контроллер 5 выполняет обработку Этапа S22, если флаг коррекции ускорения равен 0, тогда как выполняется обработка Этапа S26, если флаг коррекции ускорения равен 1.
На Этапе S22 контроллер 5 определяет, выполнять или нет коррекцию ускорения посредством определения того, нажата или нет педаль акселератора с высокой интенсивностью для ускорения, т.е. присутствует или нет какой-либо внезапный запрос ускорения. В частности, намерение начать ускорение подтверждается посредством определения того, является или нет скорость манипуляции акселератора, указывающая величину манипуляции акселератора в единицу времени, выше предварительно определенной скорости. Контроллер 5 определяет отсутствие внезапного запроса ускорения и выполняет обработку Этапа S23, если скорость манипуляции акселератора не выше предварительно определенной скорости. С другой стороны, определяется присутствие внезапного запроса ускорения и выполняется обработка Этапа S24, если скорость манипуляции акселератора выше предварительно определенной скорости.
На Этапе S23 контроллер 5 задает флаг коррекции ускорения, равный 0.
На Этапе S24 контроллер 5 задает флаг коррекции ускорения, равный 1.
На Этапе S25 контроллер 5 сохраняет текущую величину манипуляции акселератора, т.е. величину манипуляции акселератора, когда было подтверждено намерение начать ускорение (здесь и далее именуемую как «величина манипуляции акселератора при начале ускорения»). Одновременно сохраняется текущая скорость транспортного средства, т.е. скорость транспортного средства, когда было подтверждено намерение начать ускорение (здесь и далее именуемую как «скорость транспортного средства при начале ускорения»).
На Этапах с S26 по S29 определяется, завершить или нет коррекцию ускорения.
На Этапе S26 контроллер 5 определяет, является или нет текущая величина манипуляции акселератора не меньше величины манипуляции акселератора при начале ускорения. Контроллер 5 выполняет обработку Этапа S23, если текущая величина манипуляции акселератора меньше величины манипуляции акселератора при начале ускорения. С другой стороны, выполняется обработка Этапа S27, если текущая величина манипуляции акселератора не меньше величины манипуляции акселератора при начале ускорения.
На Этапе S27 контроллер 5 определяет, является или нет текущая скорость транспортного средства не ниже скорости транспортного средства (здесь и далее именуемой как «скорость транспортного средства при завершении ускорения»), полученной посредством сложения предварительно определенной скорости транспортного средства (например, 50 [км/ч]) со скоростью транспортного средства при начале ускорения. Контроллер 5 выполняет обработку Этапа S28, если текущая скорость транспортного средства ниже скорости транспортного средства при завершении ускорения. С другой стороны, выполняется обработка Этапа S23, если текущая скорость транспортного средства не ниже скорости транспортного средства при завершении ускорения.
На Этапе S28 контроллер 5 определяет, истекло или нет предварительно определенное время после подтверждения намерения начать ускорение. Контроллер 5 выполняет обработку Этапа S23, если предварительно определенное время истекло после подтверждения намерения начать ускорение, тогда как в ином случае выполняется обработка Этапа S29.
На Этапе S29 контроллер 5 определяет, прошло или нет транспортное средство предварительно определенное расстояние после подтверждения намерения начать ускорение. Контроллер 5 выполняет обработку Этапа S23, если транспортное средство прошло предварительно определенное расстояние после подтверждения намерения начать ускорение, при этом завершая процесс на этот раз в ином случае.
Фиг. 8 является блок-схемой последовательности операций, показывающей процесс коррекции уклона.
На Этапе S31 контроллер 5 определяет, является или нет уклон дороги, по которой в текущий момент движется транспортное средство, не меньше предварительно определенного уклона. Контроллер 5 выполняет обработку Этапа S32, если уклон дороги меньше предварительно определенного уклона, тогда как выполняется обработка Этапа S33 в ином случае.
На Этапе S32 контроллер 5 задает флаг коррекции уклона, равный 0.
На Этапе S33 контроллер 5 задает флаг коррекции уклона, равный 1.
На Этапе S34 контроллер 5 сохраняет текущую величину манипуляции акселератора, т.е. величину манипуляции акселератора, когда уклон дороги становится равным или больше предварительно определенного уклона (здесь и далее именуемую как величина манипуляции акселератора при обнаружении предварительно определенного уклона»). Одновременно сохраняется текущая скорость транспортного средства, т.е. скорость транспортного средства, когда было обнаружено, что уклон дороги стал равным или больше предварительно определенного уклона (здесь и далее именуемая как «скорость транспортного средства при обнаружении предварительно определенного уклона»).
На Этапе S35 контроллер 5 задает оптимальную таблицу в качестве таблицы выходной характеристики для уклона из множества таблиц выходной характеристики на основании текущего уклона дороги и скорости транспортного средства при обнаружении предварительно определенного уклона. В частности, таблица выходной характеристики для уклона задается таким образом, что чем больше уклон дороги и ниже скорость транспортного средства при обнаружении предварительно определенного уклона, тем выше значение открытия дросселя, соответствующего величине манипуляции акселератора. Таблица выходной характеристики задается между сплошной линией A и опорной линией на Фиг. 6.
Фиг. 9 является блок-схемой последовательности операций, показывающей процесс изменения выходной характеристики.
На Этапе S41 контроллер 5 определяет, равен или нет флаг коррекции ускорения 1. Контроллер 5 выполняет обработку Этапа S42, если флаг коррекции ускорения равен 1, тогда как выполняется обработка Этапа S43 в ином случае.
На Этапе S42 контроллер 5 выбирает таблицу выходной характеристики для ускорения заданного для максимального увеличения значения открытия дросселя, соответствующего величине манипуляции акселератора, в качестве таблицы целевой выходной характеристики. Таблица выходной характеристики для ускорения является таблицей, соответствующей сплошной линии A на Фиг. 6.
На Этапе S43 контроллер 5 определяет, равен или нет флаг коррекции уклона 1. Контроллер 5 выполняет обработку Этапа S44, если флаг коррекции уклона равен 1, тогда как выполняется обработка Этапа S45 в ином случае.
На Этапе S44 контроллер 5 сравнивает таблицу выходной характеристики для уклона и таблицу базовой выходной характеристики и выбирает таблицу, заданную с большим значением открытия дросселя, соответствующего величине манипуляции акселератора, в качестве таблицы целевой выходной характеристики.
На Этапе S45 контроллер 5 выбирает таблицу базовой выходной характеристики в качестве таблицы целевой выходной характеристики.
На Этапах S46 и S47 определяется, изменить фактически или нет таблицу выходной характеристики на таблицу целевой выходной характеристики.
На Этапе S46 контроллер 5 сравнивает текущую выбранную выходную характеристику и целевую выходную характеристику. Затем определяется, является ли таблица целевой выходной характеристики таблицей, заданной с большим значением открытия дросселя, соответствующего величине манипуляции акселератора, чем в текущей выбранной таблице выходной характеристики. Т.е. определяется, больше или нет открытие дросселя, вычисляемое посредством обращения к таблице целевой выходной характеристики, того, что вычисляется посредством обращения к текущей выбранной таблице выходной характеристике, если величина манипуляции акселератора одинаковая. Контроллер 5 выполняет обработку Этапа S47, если таблица целевой выходной характеристики является таблицей, заданной с большим значением открытия дросселя, соответствующего величине манипуляции акселератора, чем в текущей выбранной таблице выходной характеристики, тогда как выполняется обработка Этапа S48 в ином случае.
На Этапе S47 контроллер 5 определяет, больше или нет величина манипуляции акселератора, чем опорная величина манипуляции. В данном случае, если таблица выходной характеристики для ускорения выбрана в качестве таблицы целевой выходной характеристики, то величина манипуляции акселератора при начале ускорения задается в качестве опорной величины манипуляции. Если выходная характеристика таблицы для уклона выбрана в качестве таблицы целевой выходной характеристики, то величина манипуляции акселератора при обнаружении предварительно определенного уклона задается в качестве опорной величины манипуляции. Если таблица базовой выходной характеристики выбрана в качестве таблицы целевой выходной характеристики, то величина манипуляции акселератора, когда была задана таблица базовой выходной характеристики, задается в качестве опорной величины манипуляции.
Такие определения выполняются на Этапах S46 и S47, так как выходной параметр двигателя может внезапно увеличиться и транспортное средство может ускориться вопреки намерению водителя, если таблица выходной характеристики изменена на таблицу, заданную с большим значением открытия дросселя, соответствующего величине манипуляции акселератора, чем текущее значение в состоянии, где величина манипуляции акселератора сохраняется постоянной.
На Этапе S48 контроллер 5 меняет таблицу выходной характеристики с текущей выбранной на таблицу целевой выходной характеристики.
На Этапе S49 контроллер 5 сохраняет текущую выбранную таблицу выходной характеристики и запрещает изменение на таблицу целевой выходной характеристики.
Фиг. 10 является временной диаграммой, показывающей операцию управления выходной характеристикой, когда флаг коррекции ускорения и флаг коррекции уклона равны 0.
Когда разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства увеличивается (Фиг. 10(A)) и базовое целевое ускорение становится относительно большим в момент t1 времени, то таблица с большим значением открытия дросселя, соответствующего величине манипуляции акселератора, чем в текущей выбранной таблице выходной характеристики, задается в качестве таблицы базовой выходной характеристики (S18). Поскольку флаг коррекции ускорения и флаг коррекции уклона равны 0, то данная таблица базовой выходной характеристики выбирается в качестве таблицы целевой выходной характеристики (Фиг. 10(C); Нет на этапе S41, Нет на этапах S43, S45).
Таблица с большим открытием дросселя, соответствующим величине манипуляции акселератора, чем в текущей выбранной таблице выходной характеристики, выбирается в качестве таблицы целевой выходной характеристики с момента t1 времени по момент t2 времени (Фиг. 10(C)). Кроме того, величина манипуляции акселератора сохраняется постоянной (Фиг. 10(B)). Таким образом, открытие дросселя определяется на основании величины манипуляции акселератора посредством обращения к текущей выбранной таблице выходной характеристики (Фиг. 10(C); Да на этапе S46, Нет на этапах S47, S49).
Когда педаль акселератора нажимается в момент t2 времени (Фиг. 10(B)) и величина манипуляции акселератора обнаруживается как являющаяся больше опорной величины манипуляции (здесь, величина манипуляции акселератора, когда была задана таблица базовой выходной характеристики, т.е. величина манипуляции акселератора в момент t1 времени) в момент t3 времени (Фиг. 10(B)), то таблица выходной характеристики меняется с текущей выбранной таблицы выходной характеристики на таблицу целевой выходной характеристики (Фиг. 10(C); Да на этапе S46, Да на этапах S47, S48).
Следует отметить, что открытие дросселя постепенно меняется на открытие дросселя, вычисленное посредством обращения к таблице целевой выходной характеристики, когда текущая выбранная таблица выходной характеристики меняется на таблицу целевой выходной характеристики (Фиг. 10(C); с момента t3 времени до момента t4 времени). Это может предотвратить ухудшение управляемости, связанное с внезапным изменением открытия дросселя.
В данном случае, если флаг коррекции ускорения равен 1, то время для изменения открытия дросселя на открытие дросселя, вычисленное посредством обращения к таблице целевой выходной характеристики, может быть сокращено, в сравнении с тем, которое используется, когда флаг коррекции ускорения равен 0. Таким образом, может быть устранено то, что водитель чрезмерно нажимает педаль акселератора во время ускорения и экономия топлива может быть улучшена посредством увеличения скорости реакции двигателя 1 на манипуляцию акселератора, когда водитель имеет намерение ускориться.
Если разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства становится меньше (Фиг. 10(A)) и базовое целевое ускорение становится относительно меньше в момент t5 времени, то таблица с меньшим значением открытия дросселя, соответствующего величине манипуляции акселератора, чем в текущей выбранной таблице выходной характеристики, задается в качестве таблицы базовой выходной характеристики (S18). Поскольку флаг коррекции ускорения и флаг коррекции уклона равны 0, то данная таблица базовой выходной характеристики выбирается в качестве таблицы целевой выходной характеристики (Фиг. 10(C); Нет на этапе S41, Нет на этапах S43, S45).
Кроме того, поскольку таблица с меньшим открытием дросселя, соответствующим величине манипуляции акселератора, чем в текущей выбранной таблице выходной характеристики, выбирается в качестве таблицы целевой выходной характеристики, то таблица выходной характеристики меняется с текущей выбранной таблицы выходной характеристики в данный момент времени (момент t5 времени) на таблицу целевой выходной характеристики (Фиг. 10(C); Нет на этапах S46, S48). Затем открытие дросселя постепенно меняется на открытие дросселя, вычисленное посредством обращения к таблице целевой выходной характеристики (Фиг. 10(C); с момента t5 времени до момента t6 времени).
Фиг. 11 является временной диаграммой, показывающей операцию управления выходной характеристикой, когда флаг коррекции ускорения равен 0. Следует отметить, что рекомендуемая скорость транспортного средства остается без изменений.
Когда фактический уклон становится больше предварительно определенного уклона (Фиг. 11(A); Да на этапе S31) в момент t11 времени, то флаг коррекции уклона задается равным 1 (Фиг. 11(C); этап S33) и таблица выходной характеристики для уклона задается на основании фактического уклона и скорости собственного транспортного средства (S35). Поскольку рекомендуемая скорость транспортного средства остается без изменения и здесь также постоянна величина манипуляции акселератора, то открытие дросселя, соответствующее величине манипуляции акселератора, больше в таблице выходной характеристики для уклона, чем в таблице базовой выходной характеристики.
Поскольку флаг коррекции ускорения равен 0 и открытие дросселя, соответствующее величине манипуляции акселератора, больше в таблице выходной характеристики для уклона, чем в таблице базовой выходной характеристики, то таблица выходной характеристики для уклона задается в качестве таблицы целевой выходной характеристики (Нет на этапе S41, Да на этапе S43, S44).
Когда педаль акселератора нажимается в момент t12 времени и обнаруживается, что величина манипуляции акселератора больше опорной величины манипуляции (здесь, величина манипуляции акселератора при обнаружении предварительно определенного уклона, т.е. величина манипуляции акселератора в момент t11 времени) в момент t13 времени (Фиг. 11(B)), то таблица выходной характеристики меняется с текущей выбранной таблицы выходной характеристики на таблицу целевой выходной характеристики (Фиг. 11(D); Да на этапе S46, Да на этапах S47, S48). Затем открытие дросселя постепенно меняется на открытие дросселя, вычисленное посредством обращения к таблице целевой выходной характеристики (Фиг. 11(D); с момента t13 времени до момента t14 времени).
В соответствии с описанным выше настоящим вариантом осуществления, рекомендуемая скорость транспортного средства, с которой собственное транспортное средство может комфортно и с экономией топлива осуществлять движение, вычисляется на основании внешних условий движения транспорта по дорогам, оцениваемых по информации навигации, и расстояния между транспортными средствами. Затем осуществляется управление выходной характеристикой двигателя до характеристики, при которой собственное транспортное средство легко движется с данной рекомендуемой скоростью транспортного средства.
В частности, когда рекомендуемая скорость транспортного средства переключается во время движения и разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства становится относительно большой, то выходная характеристика двигателя, при которой легко ускориться, задается посредством увеличения открытия дросселя, соответствующего величине манипуляции акселератора. По мере того как разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства уменьшается, т.е. по мере того, как скорость собственного транспортного средства достигает рекомендуемой скорости транспортного средства, выполняется изменение на выходную характеристику двигателя, при которой сложно ускориться, посредством постепенного уменьшения открытия дросселя, соответствующего величине манипуляции акселератора.
Если рекомендуемая скорость транспортного средства переключается во время движения, то водитель, как полагают, в основном регулирует скорость транспортного средства до рекомендуемой скорости транспортного средства. Тем не менее, если водитель не обладает достаточной техникой вождения, водитель может чрезмерно нажать педаль акселератора при регулировании скорости транспортного средства до рекомендуемой скорости транспортного средства и вернуть педаль акселерометра, чтобы отрегулировать скорость транспортного средства до рекомендуемой скорости транспортного средства, после того как скорость транспортного средства превысит рекомендуемую скорость транспортного средства. Если это происходит, то транспортное средство излишне ускоряется, вследствие чего ухудшается экономия топлива.
Как уже описано, в зависимости от техники вождения водителя, педаль акселератора может быть нажата больше, чем необходимо для ускорения транспортного средства, и может быть ухудшена экономия топлива, когда скорость транспортного средства регулируется до рекомендуемой скорости транспортного средства. Таким образом, экономия топлива варьируется из-за различий в технике вождения водителей.
Соответственно, выходная характеристика двигателя, при которой сложно ускориться, постепенно задается посредством постепенного уменьшения открытия дросселя, соответствующего величине манипуляции акселератора, по мере того как скорость собственного транспортного средства достигает рекомендуемой скорости транспортного средства, как в настоящем варианте осуществления, посредством чего может быть устранено то, что транспортное средство ускоряется больше, чем необходимо, даже если водитель нажимает педаль акселератора больше, чем необходимо. Таким образом, вариация экономии топлива, вызванная различиями в технике вождения водителей, может быть устранена и экономия топлива может быть улучшена независимо от техники вождения водителя.
Кроме того, посредством постепенного уменьшения открытия дросселя, соответствующего величине манипуляции акселератора, таким образом, что скорость собственного транспортного средства достигает рекомендуемой скорости транспортного средства, изменение в открытие дросселя по отношению к изменению в величине манипуляции акселератора можно сделать меньше (уменьшить скорость реакции двигателя 1). Это может устранить колебание скорости транспортного средства, когда осуществляется грубая манипуляция акселератора в окрестности рекомендуемой скорости транспортного средства. Таким образом, движение с постоянной скоростью с рекомендуемой скоростью транспортного средства, приемлемой для внешних условий движения транспорта по дорогам, становится проще, вследствие чего может быть улучшена экономия топлива.
Кроме того, поскольку выходная характеристика двигателя, соответствующая величине манипуляции акселератора, меняется в соответствии с разностью скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства, то манипуляция акселератора водителем при ускорении транспортного средства до рекомендуемой скорости транспортного средства может быть устранена. Т.е. можно уменьшить величину манипуляции акселератора со стороны водителя, когда транспортное средство ускоряется до рекомендуемой скорости транспортного средства в эпизоде, где переключается рекомендуемая скорость транспортного средства, и уменьшить разность между величиной манипуляции акселератора до того, как переключается рекомендуемая скорость транспортного средства, и величиной манипуляции акселератора после того, как рекомендуемая скорость транспортного средства переключается. Таким образом, чрезмерное нажатие педали акселератора водителем во время ускорения может быть устранено и может быть улучшена экономия топлива.
Кроме того, в соответствии с настоящим вариантом осуществления, выходная характеристика меняется на выходную характеристику для ускорения для относительного увеличения открытия дросселя, соответствующего величине манипуляции акселератора (увеличивают скорость реакции двигателя 1), если присутствует твердый запрос ускорения. Таким образом, может быть осуществлена реакция на твердый запрос ускорения со стороны водителя и может быть устранено чрезмерное нажатие педали акселератора водителем во время ускорения. Вследствие этого может быть улучшена экономия топлива, при этом гарантируется управляемость.
Выходная характеристика двигателя меняется в соответствии с разностью скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства после того, как выдерживается предварительно определенное условие (скорость транспортного средства увеличилась на предварительно определенную величину, истекло предварительно определенное время или предварительно определенное расстояние было пройдено с начала ускорения) после твердого запроса ускорения. Это может улучшить экономию топлива, при этом устраняя ненужное ускорение.
Кроме того, в соответствии с настоящим вариантом осуществления, выходная характеристика меняется в соответствии с фактическим уклоном. В частности, характеристика дросселя задается таким образом, что чем больше фактический уклон, тем больше открытие дросселя, соответствующее величине манипуляции акселератора.
Если техника вождения недостаточна, то водитель может чрезмерно нажать педаль акселератора, чтобы излишне ускорить транспортное средство, не будучи в состоянии правильно регулировать, при регулировке скорости транспортного средства в соответствии с изменением в фактическом уклоне.
Соответственно, посредством изменения выходной характеристики двигателя в соответствии с фактическим уклоном, как в настоящем варианте осуществления, может быть уменьшено увеличение в величине нажатия педали акселератора водителем. Таким образом, может быть улучшена экономия топлива посредством устранения ненужного ускорения.
Кроме того, в соответствии с настоящим изобретением, таблица выходной характеристики меняется на ту, в которой больше значение открытия дросселя, соответствующего величине манипуляции акселератора, чем текущее значение после того, как обнаружено увеличение в величине манипуляции акселератора. Это может предотвратить ускорение транспортного средства вопреки намерению водителя посредством предотвращения увеличения выходного параметра двигателя, несмотря на то, что никакой манипуляции акселератора не выполняется.
Кроме того, в соответствии с настоящим вариантом осуществления, открытие дросселя постепенно меняется на открытие дросселя, вычисленное посредством обращения к таблице целевой выходной характеристики, когда таблица выходной характеристики меняется на таблицу целевой выходной характеристики. Это может предотвратить ухудшения управляемости, связанное с внезапным изменением в открытии дросселя.
(Второй Вариант Осуществления)
Далее описывается второй вариант осуществления изобретения. Второй вариант осуществления настоящего варианта осуществления отличается от первого варианта осуществления в том, что вычисляется приращение открытия дросселя, соответствующего величине манипуляции акселератора, и выходная характеристика двигателя меняется на основании данного приращения. Нижеследующее описание сконцентрировано на этом отличии. Следует отметить, что части, исполняющие функции, аналогичные тем, что представлены в первом варианте осуществления, обозначены одинаковыми обозначениями, и повторное описание соответственно опущено в каждом из описываемых ниже вариантов осуществления.
Фиг. 12 является блок-схемой последовательности операций, показывающей процесс задания базовой выходной характеристики в соответствии с настоящим вариантом осуществления.
На Этапе S201 контроллер 5 обращается к карте на Фиг. 13, которая определена экспериментально или подобным образом заранее, и вычисляет приращение для задания выходной характеристики двигателя 1 до характеристики, приемлемой для ускорения транспортного средства до рекомендуемой скорости транспортного средства (здесь и далее именуемое как «рекомендуемое приращение ускорения») на основании разности скорости транспортного средства и скорости собственного транспортного средства. Как показано на карте на Фиг. 13, рекомендуемое приращение ускорения становится меньше, по мере того как становится меньше разность скорости транспортного средства, т.е. по мере того как скорость собственного транспортного средства достигает рекомендуемой скорости транспортного средства. Кроме того, рекомендуемое приращение ускорения больше, когда скорость собственного транспортного средства низкая, чем когда скорость собственного транспортного средства высокая.
На Этапе S202 контроллер 5 обращается к таблице на Фиг. 14, которая определена экспериментально или подобным образом заранее, и вычисляет приращение для задания выходной характеристики двигателя 1 до характеристики, приемлемой для ускорения с экономией топлива транспортного средства (здесь и далее именуемое как «приращение ускорения с экономией топлива») на основании скорости собственного транспортного средства. Как показано на карте на Фиг. 14, приращение ускорения с экономией топлива постоянно до тех пор, пока скорость собственного транспортного средства не достигает предварительно определенной скорости транспортного средства, и постепенно становится меньше после того, как скорость собственного транспортного средства превышает предварительно определенную скорость транспортного средства.
На Этапе S203 контроллер 5 обращается к карте, которая определена экспериментально или подобным образом заранее, и вычисляет приращение для задания выходной характеристики двигателя 1 до характеристики, приемлемой для создания ускорения, запрашиваемого водителем (здесь и далее именуемое как «запрашиваемое приращение») на основании величины манипуляции акселератора и скорости собственного транспортного средства.
На Этапе S204 контроллер 5 обращается к таблице на Фиг. 15, которая определена экспериментально или подобным образом заранее, и вычисляет приращение для задания выходной характеристики двигателя 1 до характеристики, при которой текущая скорость транспортного средства легко сохраняется (здесь и далее именуемое как «приращение сохранения скорости транспортного средства») на основании скорости собственного транспортного средства. Как показано на карте на Фиг. 15, приращение сохранения скорости транспортного средства увеличивается по мере увеличения скорости собственного транспортного средства.
На Этапе S205 контроллер 5 вычисляет базовое целевое приращение. В частности, сравниваются рекомендуемое приращение ускорения и приращение ускорения с экономией топлива, и наименьшее задается в качестве предварительного целевого приращения. Затем соответственно сравниваются предварительное целевое приращение, запрашиваемое приращение и приращение сохранения скорости транспортного средства, и наибольшее задается в качестве базового целевого приращения.
Фиг. 16 является блок-схемой последовательности операций, показывающей процесс коррекции уклона в соответствии с настоящим вариантом осуществления.
На Этапе S211 контроллер 5 вычисляет приращение коррекции для уклона на основании текущего уклона дороги и скорости транспортного средства при обнаружении предварительно определенного уклона. Приращение коррекции для уклона задается таким образом, чтобы увеличиваться по мере того, как увеличивается уклон дороги и уменьшается скорость транспортного средства при обнаружении предварительно определенного уклона.
Фиг. 17 является блок-схемой последовательности операций, показывающей процесс изменения выходной характеристики в соответствии с настоящим вариантом осуществления.
На Этапе S221 контроллер 5 вычисляет целевое приращение посредством применения коррекции для внезапного ускорения к базовому целевому приращению. В частности, целевое приращение задается посредством применения коррекции для увеличения максимального значения, задаваемого в качестве приращения к базовому целевому приращению.
На Этапе S222 контроллер 5 вычисляет целевое приращение посредством применения коррекции для уклона к базовому целевому приращению. В частности, целевое приращение задается посредством добавления приращения коррекции для уклона к базовому целевому приращению.
На Этапе S223 контроллер 5 задает базовое целевое приращение в качестве целевого приращения.
На Этапе S224 контроллер 5 определяет, больше или нет целевое приращение текущего приращения. Контроллер 5 выполняет обработку Этапа S47, если целевое приращение больше текущего приращения, тогда как выполняется обработка Этапа S225 в ином случае.
На Этапе S225 контроллер 5 задает таблицу целевой выходной характеристики на основании целевого приращения.
Фиг. 18 является графиком, показывающим способ для задания таблицы целевой выходной характеристики в соответствии с настоящим вариантом осуществления.
Как показано на Фиг. 18, сплошная линия A представляет собой таблицу целевой выходной характеристики, заданной, когда целевое приращение максимально. Сплошная линия B представляет собой таблицу целевой выходной характеристики, заданной, когда целевое приращение минимально. В настоящем варианте осуществления таблица целевой выходной характеристики соответствующим образом задается между сплошными линиями A и B на основании заданного целевого приращения.
В соответствии с описанным выше настоящим вариантом осуществления могут быть получены функции и эффекты, аналогичные тем, что представлены в описанном выше первом варианте осуществления.
(Третий Вариант Осуществления)
Далее описывается третий вариант осуществления настоящего изобретения. Третий вариант осуществления настоящего варианта осуществления отличается от первого варианта осуществления в том, что задается такая таблица выходной характеристики, чтобы уменьшить значение открытия дросселя, соответствующего величине манипуляции акселератора, когда растет уклон вниз дороги. Нижеследующее описание сконцентрировано на отличии.
В процессе коррекции уклона первого варианта осуществления выходная характеристика двигателя 1 меняется, только когда уклон дороги становится равным или больше предварительно определенного уклона, т.е. когда собственное транспортное средство движется в гору.
Тем не менее транспортное средство, в частности, вероятно, ускоряется при движении на спуске. Таким образом, когда собственное транспортное средство движется на спуске, водитель может чрезмерно нажимать педаль акселератора для ненужного ускорения транспортного средства, не будучи в состоянии правильно регулировать, если он не обладает достаточной техникой вождения.
Соответственно, в настоящем варианте осуществления, выходная характеристика двигателя 1 меняется также, когда уклон дороги становится равным или меньше предварительно определенного уклона вниз, т.е. когда собственное транспортное средство движется на спуске. В частности, таблица выходной характеристики для уклона вниз, приемлемая для движения на спуске, задается в качестве таблицы выходной характеристики, когда уклон дороги становится равным или меньше предварительно определенного уклона вниз.
Фиг. 19 является блок-схемой последовательности операций, показывающей процесс коррекции уклона в соответствии с настоящим вариантом осуществления.
На Этапе S301 контроллер 5 определяет, движется или нет собственное транспортное средство на спуске. В частности, определяется, является или нет уклон дороги не больше предварительно определенного уклона вниз. Следует отметить, что предварительно определенный уклон вниз имеет отрицательное значение. Контроллер 5 выполняет обработку Этапа S302, если собственное транспортное средство не движется на спуске, т.е. если уклон дороги больше предварительно определенного уклона. С другой стороны, выполняется обработка Этапа S303, если собственное транспортное средство движется на спуске, т.е. если уклон дороги не больше предварительно определенного уклона.
На Этапе S302 контроллер 5 задает флаг коррекции уклона вниз, равный 0. Флаг коррекции уклона вниз является флагом, который задается равным 1, во время движения на спуске и задается равным 0, когда транспортное средство не движется на спуске, и задан равным 0 в исходном состоянии.
На Этапе S303 контроллер 5 задает флаг коррекции уклона вниз, равный 1.
На Этапе S304 контроллер 5 сохраняет текущую величину манипуляции акселератора, т.е. величину манипуляции акселератора, когда уклон дороги стал равным или меньше предварительно определенного уклона вниз (здесь и далее именуемую как «величина манипуляции акселератора при обнаружении уклона вниз»).
На Этапе S305 контроллер 5 задает таблицу выходной характеристики для уклона вниз на основании текущего уклона дороги.
Фиг. 20 является графиком, показывающим таблицу выходной характеристики для уклона вниз в соответствии с настоящим вариантом осуществления.
В первом варианте осуществления, сплошная линия C задана в качестве таблицы выходной характеристики с наименьшим открытием дросселя, соответствующим величине манипуляции акселератора, и выходная характеристика двигателя 1 меняется посредством соответствующего изменения таблицы выходной характеристики между сплошными линиями A и C.
В противоположность этому, в настоящем варианте осуществления, таблица выходной характеристики с еще меньшим значением открытия дросселя, соответствующего величине манипуляции акселератора, чем в таблице выходной характеристики, показанной сплошной линией C, задается в качестве таблицы выходной характеристики для уклона вниз, когда уклон дороги становится равным или меньше предварительно определенного уклона вниз.
Сплошная линия D показывает пример таблицы выходной характеристики для уклона вниз. Когда уклон дороги становится равным или меньше предварительно определенного уклона вниз, то таблица выходной характеристики для уклона вниз задается между сплошными линиями C и D в соответствии с уклоном дороги.
Как уже описано, когда собственное транспортное средство движется на спуске, то задается такая выходная характеристика двигателя, при которой транспортное средство вряд ли ускорится, даже если нажимается педаль акселератора, посредством уменьшения значения открытия дросселя, соответствующего величине манипуляции акселератора. Это может устранить то, что транспортное средство ускоряется больше чем необходимо при движении на спуске.
Кроме того, поскольку транспортное средство, в частности, вероятно, ускоряется во время движения на спуске, если водитель не обладает достаточной техникой вождения, то водитель может чрезмерно нажимать педаль акселератора и не может правильно регулировать скорость транспортного средства, когда он хочет лишь немного ускориться в состоянии, где транспортное средство движется на спуске, посредством использования торможения двигателем, не нажимая педаль акселератора.
Соответственно, в настоящем варианте осуществления, область минимального выходного параметра, где выходной параметр двигателя 1 удерживается на предварительно определенном минимальном выходном параметре, когда величина манипуляции акселератора мала, предоставляется в таблице выходной характеристики для уклона вниз, как показано в части, обведенной пунктирной линией на Фиг. 20. Минимальный выходной параметр является таким выходным параметром, который способен выдавать состояние холостого хода, и является выходным параметром двигателя незначительно выше, чем выходной параметр двигателя, требуемый для сохранения состояния холостого хода.
Это позволяет легко регулировать скорость транспортного средства, когда требуется ускориться посредством нажатия педали акселератора лишь немного в состоянии, где транспортное средство движется на спуске посредством использования торможения двигателем, не нажимая педаль акселератора.
Фиг. 21 является блок-схемой последовательности операций, показывающей процесс изменения выходной характеристики в соответствии с настоящим вариантом осуществления.
На Этапе S310 контроллер 5 определяет, равен или нет флаг уклона вниз 1. Контроллер 5 выполняет обработку Этапа S45, если флаг уклона вниз равен 0. С другой стороны, выполняется обработка Этапа S311, если флаг уклона вниз равен 1.
На Этапе S311 контроллер 5 выбирает таблицу выходной характеристики для уклона вниз в качестве таблицы целевой выходной характеристики.
На Этапе S312 контроллер 5 определяет, является или нет величина манипуляции акселератора меньше величины манипуляции акселератора при обнаружении уклона вниз. Контроллер 5 выполняет обработку Этапа S313, если величина манипуляции акселератора меньше величины манипуляции акселератора при обнаружении уклона вниз, тогда как выполняется обработка Этапа S49 в ином случае.
На Этапе S313 контроллер 5 меняет таблицу выходной характеристики с текущей выбранной на таблицу целевой выходной характеристики.
Фиг. 22 является временной диаграммой, показывающей операцию управления выходной характеристикой в соответствии с настоящим вариантом осуществления, когда флаг коррекции ускорения и флаг коррекции уклона равны 0, а флаг коррекции уклона вниз равен 1.
Когда уклон дороги становится равным или меньше предварительно определенного уклона вниз (Фиг. 22(A); Да на этапе S301) в момент t31 времени, то флаг коррекции уклона вниз задается равным 1 (Фиг. 22(C); этап S303) и таблица выходной характеристики для уклона вниз задается в соответствии с уклоном дороги (S305).
Поскольку флаг коррекции ускорения и флаг коррекции уклона равны 0, то таблица выходной характеристики для уклона задается в качестве таблицы целевой выходной характеристики (Да на этапах S310, S311).
Когда педаль акселератора возвращается в момент t32 времени и обнаруживается, что величина манипуляции акселератора меньше величины манипуляции акселератора при обнаружении уклона вниз (величина манипуляции акселератора в момент t31 времени) в момент t33 времени (Фиг. 22(B); Да на этапе S312), то таблица выходной характеристики меняется с текущей выбранной таблицы выходной характеристики на таблицу выходной характеристики для уклона вниз, заданной в качестве таблицы целевой выходной характеристики (S313).
Затем открытие дросселя постепенно меняется на открытие дросселя, вычисленное посредством обращения к таблице выходной характеристики для уклона вниз с момента t33 времени до момента t34 времени (Фиг. 22(D)).
В соответствии с описанным выше настоящим вариантом осуществления, таблица выходной характеристики для уклона вниз выбирается в качестве таблицы выходной характеристики и значение открытия дросселя, соответствующего величине манипуляции акселератора, уменьшается, когда уклон дороги становится равным или меньше предварительно определенного уклона вниз, т.е. когда собственное транспортное средство движется на спуске.
Таким образом, может быть задана выходная характеристика, при которой сложно ускориться, даже если педаль акселератора нажата. Следовательно, даже если водитель нажимает педаль акселератора больше, чем необходимо, в частности, когда транспортное средство осуществляет движение на спуске и легко ускоряется, может быть устранено то, что транспортное средство ускоряется больше, чем необходимо.
Кроме того, в настоящем варианте осуществления, в таблице выходной характеристики для уклона вниз обеспечивается минимальная область выходного параметра, где выходной параметр двигателя сохраняется на заранее определенном минимальном выходном параметре, когда величина манипуляции акселератора небольшая.
Ускорение транспортного средства может быть устранено, даже если педаль акселератора чрезмерно нажимается, когда требуется ускориться посредством лишь небольшого нажатия педали акселератора в состоянии, при котором транспортное средство движется на спуске, посредством использования торможения двигателем, не нажимая педаль акселератора. Вследствие этого скорость транспортного средства может быть легко отрегулирована.
(Четвертый Вариант Осуществления)
Далее описывается четвертый вариант осуществления настоящего изобретения. Четвертый вариант осуществления настоящего варианта осуществления отличается от первого варианта осуществления в таблице выходной характеристики для наклона вниз. Нижеследующее описание сконцентрировано на отличии. Следует отметить, что в нижеследующем описании передаточное отношение обозначает значение, полученное посредством деления скорости вращения входного вала трансмиссии на скорость вращения выходного вала.
Когда транспортное средство движется под уклон на спуске посредством использования торможения двигателем без нажатия педали акселератора, то ускорение транспортного средства меняется в соответствии с передаточным отношением трансмиссии. В частности, чем выше передаточное отношение, тем выше ускорение транспортного средства.
В настоящем варианте осуществления, передаточное отношение меняется для достижения ускорения предварительно заданного в соответствии с уклоном дороги, когда уклон дороги становится равным или меньше предварительно определенного уклона вниз и величина манипуляции акселератора становится равной нулю. В частности, осуществляется управление трансмиссией для увеличения передаточного отношения по мере увеличения уклона вниз дороги, так что транспортное средство чрезмерно не ускоряется.
Соответственно, передаточное отношение является относительно высоким, когда транспортное средство движется под уклон на спуске. Следовательно, в случае ускорения транспортного средства посредством лишь небольшого нажатия педали акселератора в состоянии, при котором транспортное средство движется под уклон на спуске, требуемое ускорение может быть достигнуто, если осуществляется управление трансмиссией по уменьшению передаточного отношения даже без увеличения выходного параметра двигателя.
Соответственно, в настоящем варианте осуществления, в таблице выходной характеристики для уклона вниз обеспечивается область управления переключением, где транспортное средство ускоряется посредством сохранения открытия дросселя полностью закрытым и уменьшая передаточное отношение, даже если нажимается педаль акселератора.
Фиг. 23 является графиком, показывающим таблицу выходной характеристики для уклона вниз в соответствии с настоящим вариантом осуществления.
Как показано на Фиг. 23, таблица выходной характеристики для уклона вниз в соответствии с настоящим вариантом осуществления включает в себя область управления переключением, где открытие дросселя сохраняется полностью закрытым до тех пор, пока величина манипуляции акселератора не достигает предварительно определенной величины манипуляции при завершении управления переключением (вторая величина манипуляции). Кроме того, предоставлена область минимального выходного параметра, где выходной параметр двигателя сохраняется на предварительно определенном минимальном выходном параметре до тех пор, пока величина манипуляции акселератора не достигает предварительно определенной величины манипуляции при завершении сохранения минимального выходного параметра (первая величина манипуляции) от величины манипуляции при завершении управления переключением.
Фиг. 24 является временной диаграммой, показывающей операцию управления выходной характеристикой в соответствии с настоящим вариантом осуществления, когда флаг коррекции ускорения и флаг коррекции уклона равны 0, а флаг коррекции уклона вниз равен 1. Следует отметить, что на данной временной диаграмме таблица выходной характеристики уже изменена на таблицу выходной характеристики для уклона вниз в момент t41 времени.
Транспортное средство движется под уклон на спуске между моментом t41 времени и моментом t42 времени. Следовательно, управление передаточным отношением выполнено до относительно высокого передаточного отношения, соответствующего уклону дороги, чтобы устранить ускорение.
Когда педаль акселератора нажимается в момент t42 времени, то транспортное средство ускоряется посредством уменьшения передаточного отношения, при этом сохраняя открытие дросселя полностью закрытым до тех пор, пока величина манипуляции акселератора не превысит величину манипуляции при завершении управления переключением в момент t43 времени. В частности, при полностью закрытом открытии дросселя, передаточное отношение уменьшается, чтобы ускорить транспортное средство посредством возврата передаточного отношения из относительно высокого значения, соответствующего уклону дороги, до значения во время движения по плоской дороге. Когда величина манипуляции акселератора превышает величину манипуляции при завершении управления переключением в момент t43 времени, то открытие дросселя увеличивается таким образом, что выходной параметр двигателя становится равным минимальному выходному параметру.
Как уже описано, в настоящем варианте осуществления, транспортное средство ускоряется посредством уменьшения передаточного отношения с полностью закрытым открытием дросселя до тех пор, пока величина манипуляции акселератора не превышает величину манипуляции при завершении управления переключением. Т.е. до тех пор, пока величина манипуляции акселератора не превышает величину манипуляции при завершении управления переключением, транспортное средство ускоряется, продолжая движение под уклон, сохраняя выходной параметр двигателя равным нулю и уменьшая передаточное отношение. Поскольку движение под уклон может быть продолжено таким образом до тех пор, пока величина манипуляции акселератора не превысит величину манипуляции при завершении управления переключением, то может быть сохранено состояние с прекращенной подачей топлива. Вследствие этого, в соответствии с настоящим вариантом осуществления экономия топлива дополнительно улучшается в дополнение к получению эффектов, аналогичных тем, что представлены в третьем варианте осуществления.
(Пятый Вариант Осуществления)
Далее описывается пятый вариант осуществления настоящего изобретения. Пятый вариант осуществления настоящего изобретения отличается от первого варианта осуществления в том, что ускорение, запрашиваемое водителем, задается в качестве базового целевого ускорения, без задания рекомендуемой скорости транспортного средства, когда работают указатели поворота или когда величина манипуляции акселератора не меньше предварительно определенной величины манипуляции при обгоне. Нижеследующее описание сконцентрировано на отличии.
В первом варианте осуществления управление исполняется, для задания рекомендуемой скорости транспортного средства до скорости транспортного средства, которая ниже ограничения скорости в соответствии с расстоянием между транспортными средствами, и для задания выходной характеристики двигателя 1 до выходной характеристики, при которой сложно ускориться, даже если нажимается педаль акселератора, когда расстояние между транспортными средствами до впереди идущего транспортного средства сокращается.
Тем не менее, в зависимости от эпизода движения, может потребоваться сократить расстояние между транспортными средствами до впереди идущего транспортного средства при ускорении транспортного средства с целью обгона впереди идущего транспортного средства. Если выходная характеристика двигателя 1 задана в соответствии с выходной характеристикой, при которой сложно ускориться, то по мере сокращения расстояния между транспортными средствами до впереди идущего транспортного средства ухудшается эффективность управления.
В первом варианте осуществления, когда скорость манипуляции акселератора становится выше предварительно определенной скорости, то оценивается наличие запроса внезапного ускорения и в соответствии с таким случаем также исполняется управление. Тем не менее, в таком случае, скорость манипуляции акселератора не обязательно выше предварительно определенной скорости и намерение водителя обогнать впереди идущее транспортное средство или сократить расстояние между транспортными средствами до впереди идущего транспортного средства может быть недостаточно отражено.
Соответственно, в настоящем варианте осуществления, ускорение, запрашиваемое водителем, задается в качестве базового целевого ускорения, без задания рекомендуемой скорости транспортного средства, когда работают указатели поворота, или когда величина манипуляции акселератора не является меньше предварительно определенной величины манипуляции при обгоне.
Фиг. 25 является блок-схемой последовательности операций, показывающей процесс задания базовой выходной характеристики в соответствии с настоящим вариантом осуществления.
На Этапе S501 контроллер 5 определяет, является или нет величина манипуляции акселератора меньше величины манипуляции при обгоне. Контроллер 5 выполняет обработку Этапа S504, если величина манипуляции акселератора не является меньше величины манипуляции при обгоне. С другой стороны, выполняется обработка Этапа S502, если величина манипуляции акселератора меньше величины манипуляции при обгоне.
На Этапе S502 контроллер 5 определяет, работают или нет указатели поворота. Контроллер 5 выполняет обработку Этапа S503, если указатели поворота работают. С другой стороны, выполняется обработка Этапа S12, если указатели поворота не работают.
На Этапе S503 контроллер 5 определяет, находится или нет транспортное средство в состоянии холостого хода. В частности, определяется, включен или нет переключатель холостого хода. Следует отметить, что переключатель холостого хода является переключателем, который включен, когда величина манипуляции акселератора равна нулю, и выключен, когда педаль акселератора нажата. Контроллер 5 продолжает процесс на Этапе S12, если транспортное средство находится в состоянии холостого хода. С другой стороны, процесс переходит к Этапу S504, если транспортное средство не находится в состоянии холостого хода.
На Этапе S504 контроллер 5 вычисляет запрашиваемое ускорение с помощью способа, аналогичного тому, что используется на Этапе S16, и задает вычисленное запрашиваемое ускорение в качестве базового целевого ускорения.
В соответствии с описанным выше настоящим вариантом осуществления, ускорение, запрашиваемое водителем, задается в качестве базового целевого ускорения, без задания рекомендуемой скорости транспортного средства, когда работают указатели поворота или когда величина манипуляции акселератора не является меньше предварительно определенной величины манипуляции при обгоне.
Таким образом, поскольку ускорение, как запрошено водителем, может быть достигнуто как в случае, когда транспортное средство обгоняет впереди идущее транспортное средство или когда требуется сократить расстояние между транспортными средствами до впереди идущего транспортного средства, то может быть устранено ухудшение управляемости.
Несмотря на то, что выше были описаны варианты осуществления настоящего изобретения, вышеприведенные варианты осуществления являются лишь иллюстрацией некоторых примеров применения настоящего изобретения и не предназначены ограничить технический объем настоящего изобретения конкретными конфигурациями вышеприведенных вариантов осуществления.
Несмотря на то, что в вышеприведенных вариантах осуществления для изменения выходной характеристики двигателя 1 менялось открытие дросселя, соответствующее величине манипуляции акселератора, на это нет никаких ограничений. Например, выходная характеристика двигателя 1 может меняться посредством изменения величины впрыска топлива. Кроме того, в случае устройства с регулируемой фазой газораспределения, выполненного с возможностью непрерывного изменения угла подъема/срабатывания впускного клапана, выходная характеристика двигателя 1 может меняться посредством управления величиной подъема впускного клапана посредством устройства с регулируемой фазой газораспределения.
Кроме того, несмотря на то, что уклон дороги обнаруживается посредством устройства 4 навигации, он может вычисляться на основании значений обнаружения датчика ускорения для обнаружения переднего и заднего ускорений транспортного средства.
Кроме того, в приведенном выше третьем варианте осуществления, может быть задано приращение, приемлемое для спуска, и управление может исполняться как во втором варианте осуществления, когда уклон дороги становится равным или меньше предварительно определенного уклона вниз.
По данной заявке испрашивается приоритет Патентной Заявки Японии № 2011-9601, поданной в Патентное Ведомство Японии 20 января 2011 г., и Патентной Заявки Японии № 2011-143177, поданной в Патентное Бюро Японии 28 июня 2011 г., которые во всей своей полноте включены в настоящее описание посредством ссылки.
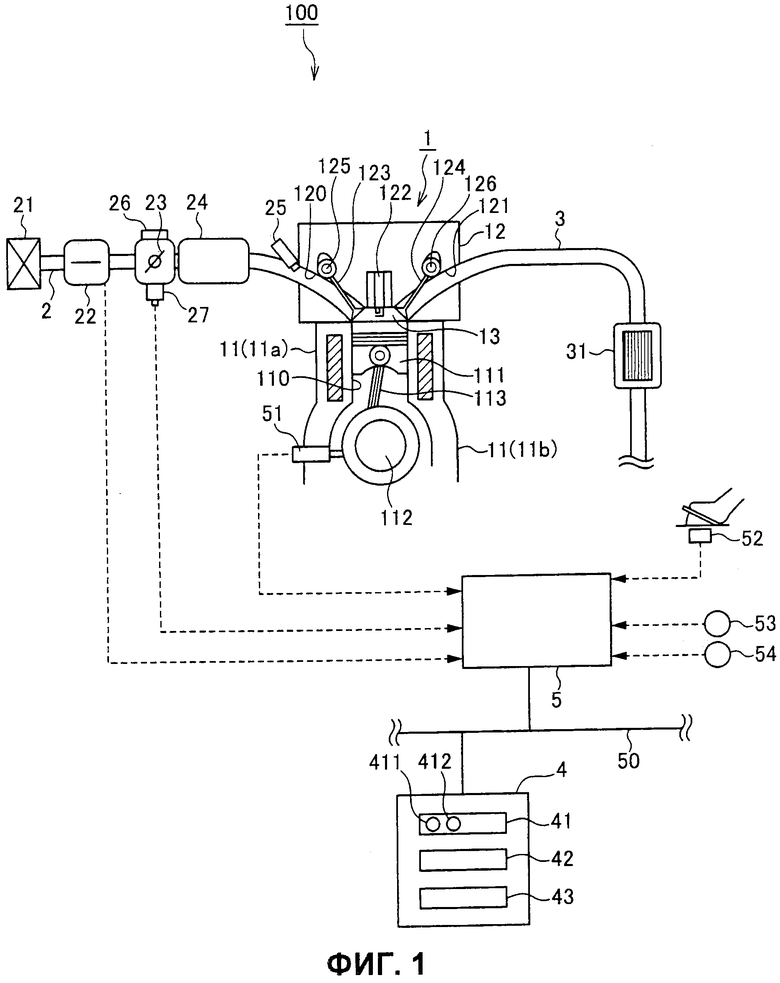
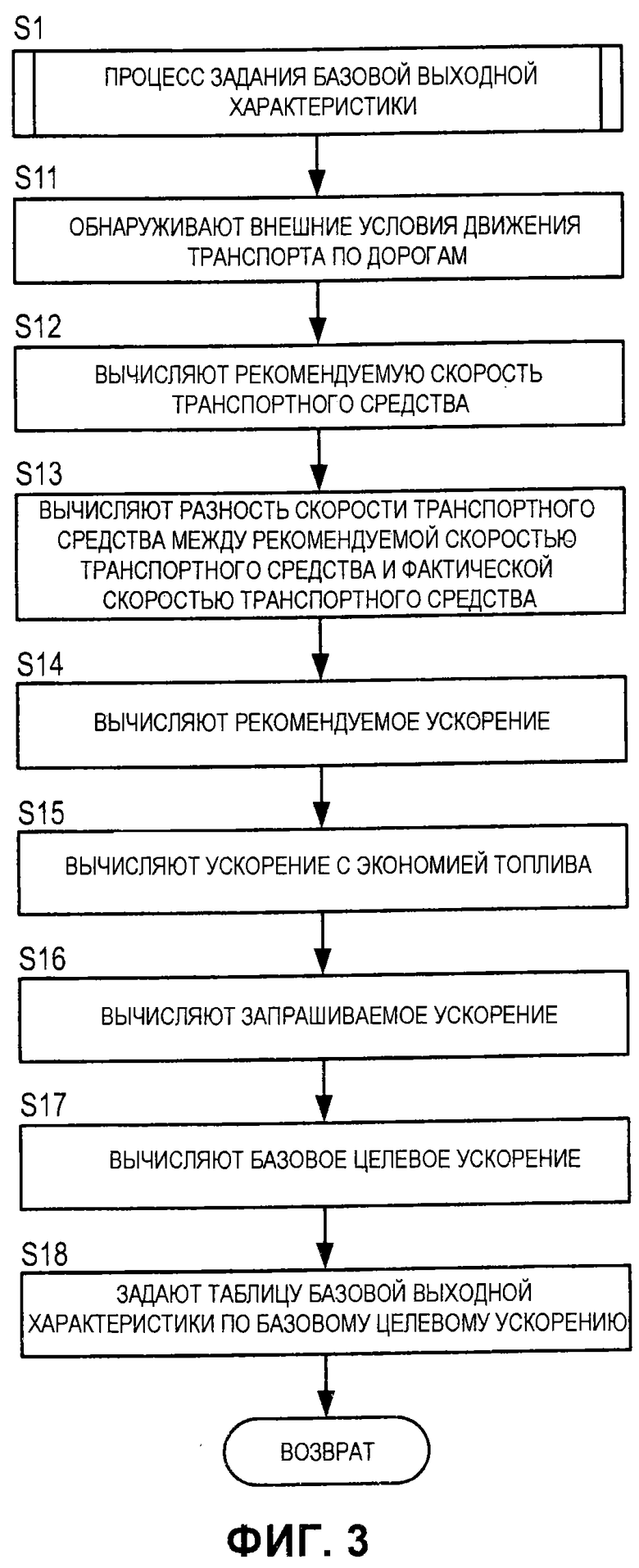
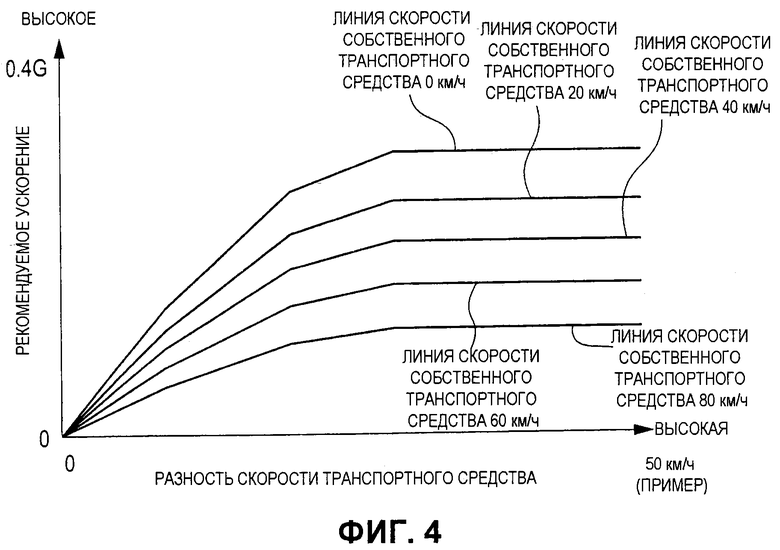
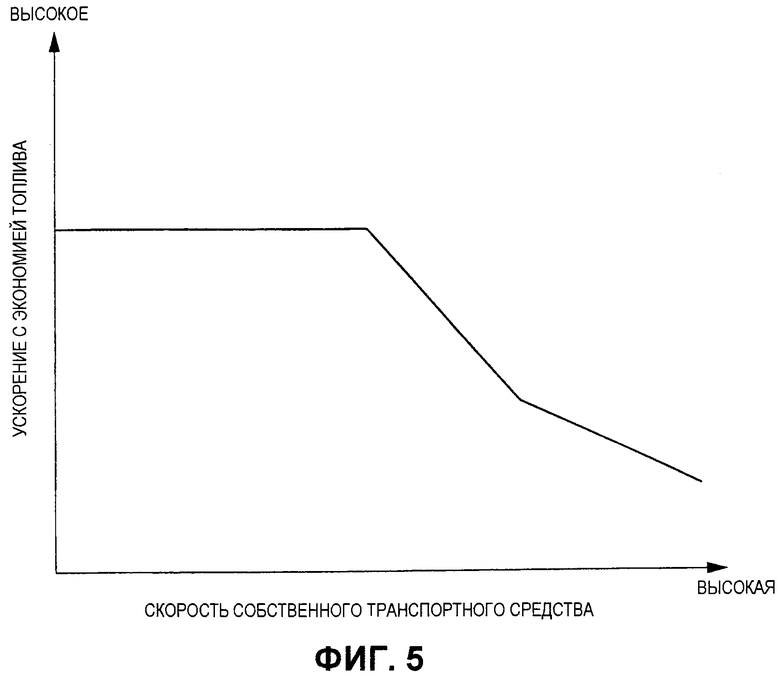
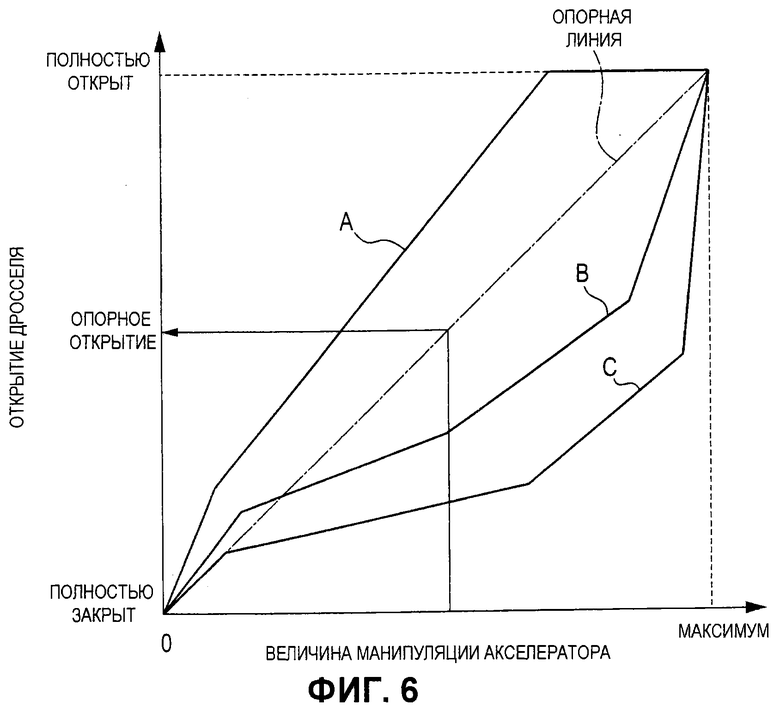
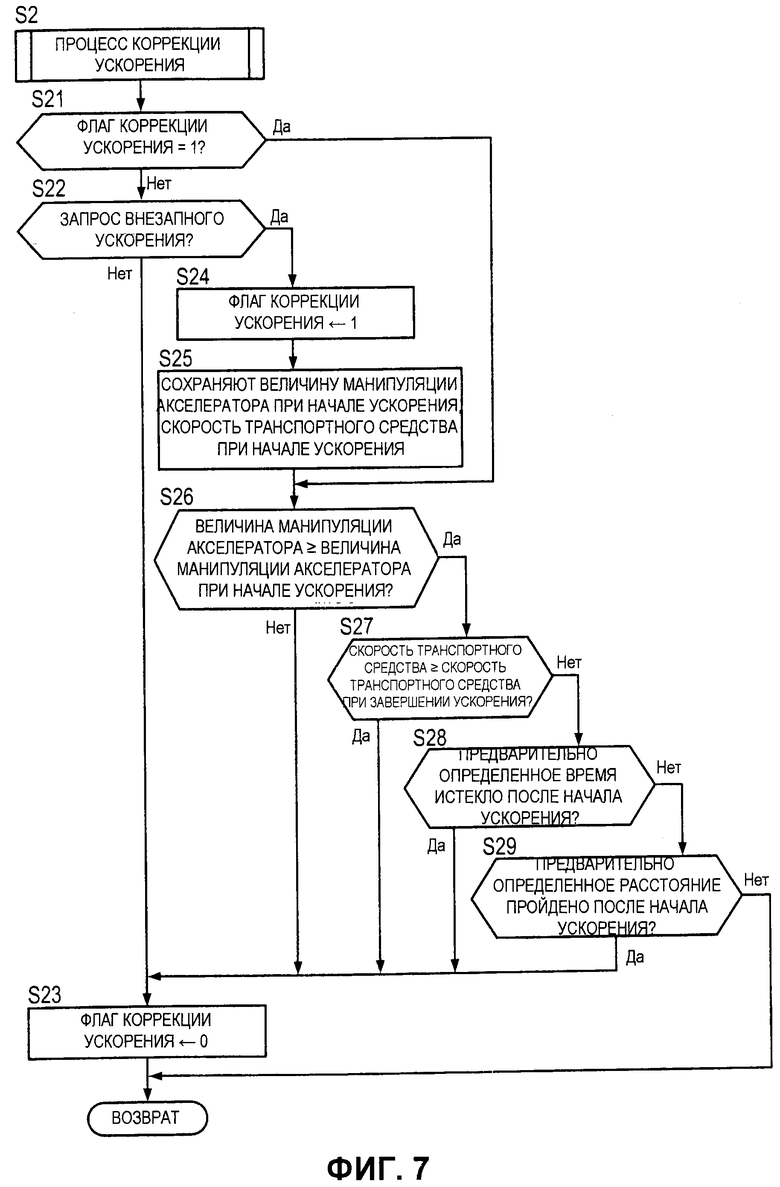
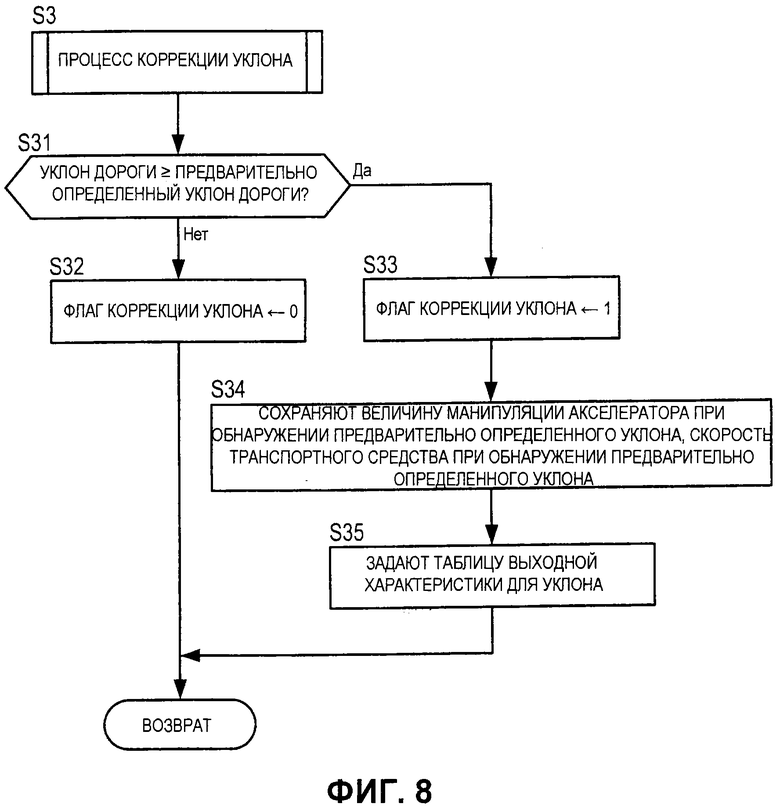
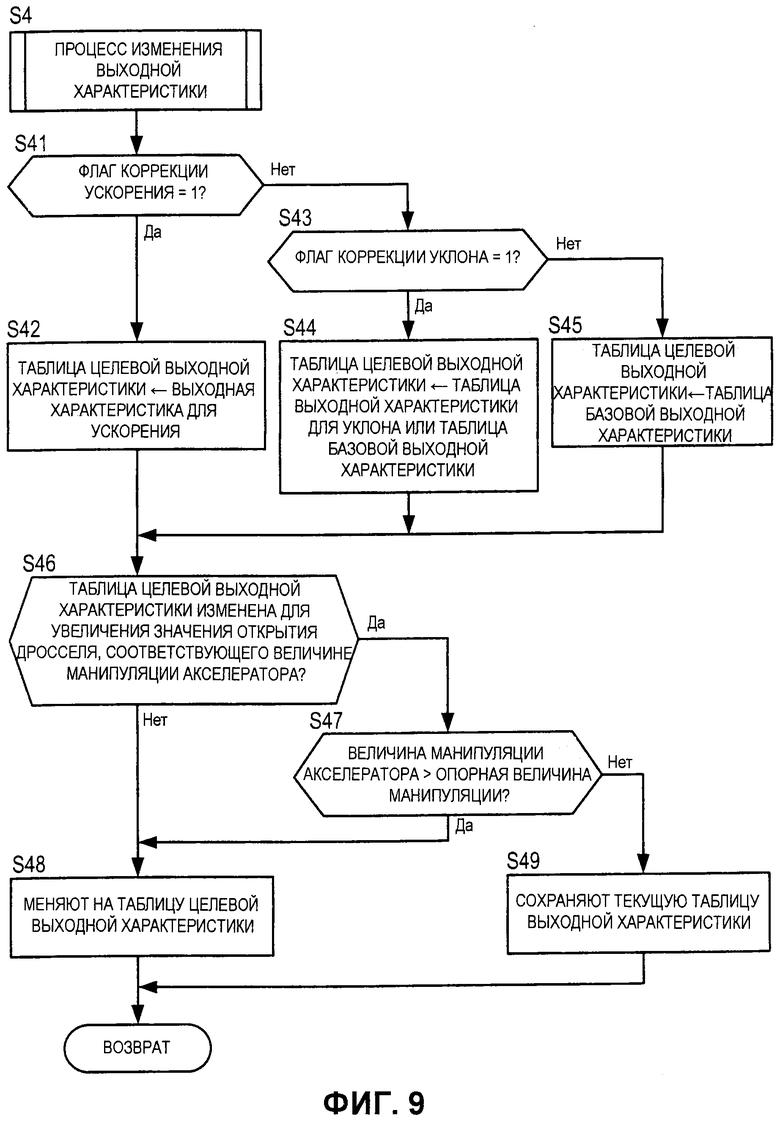
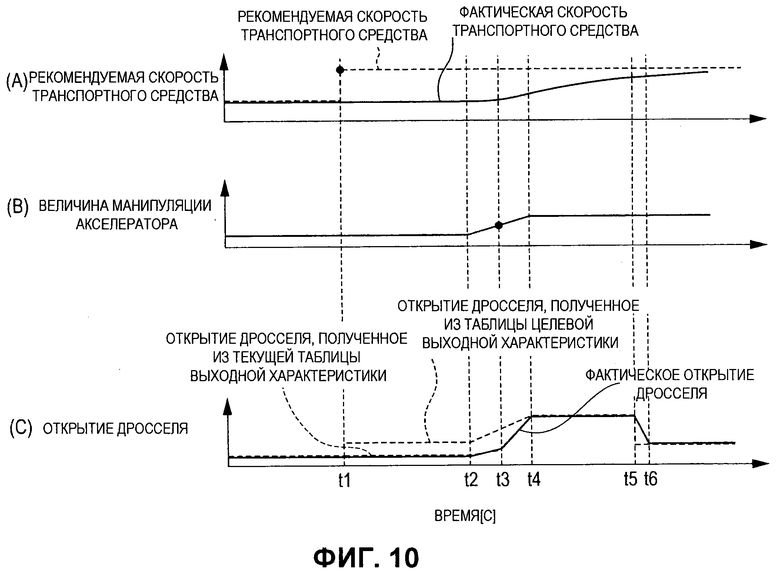
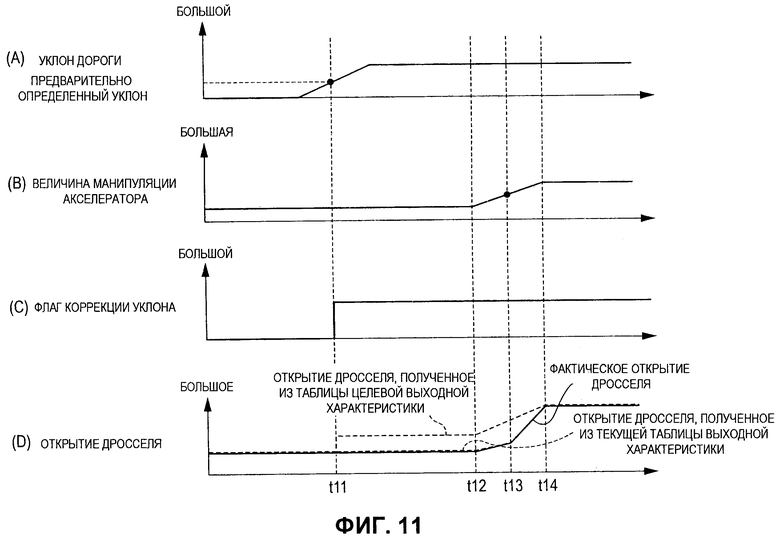

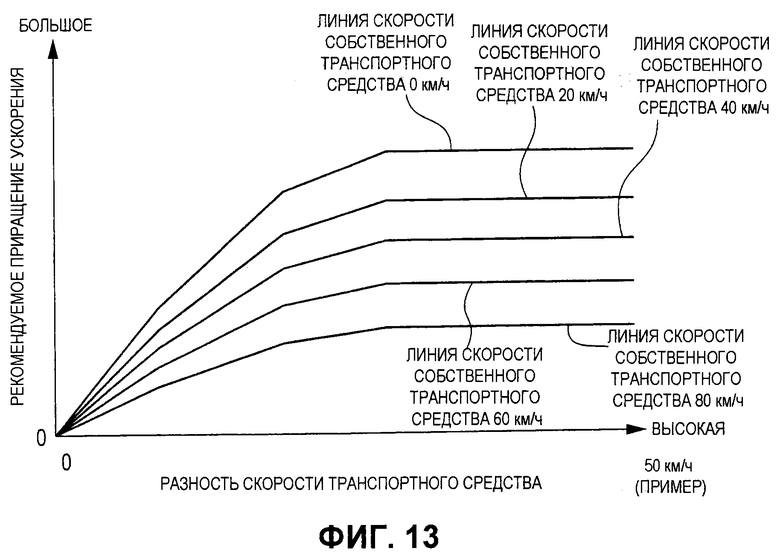
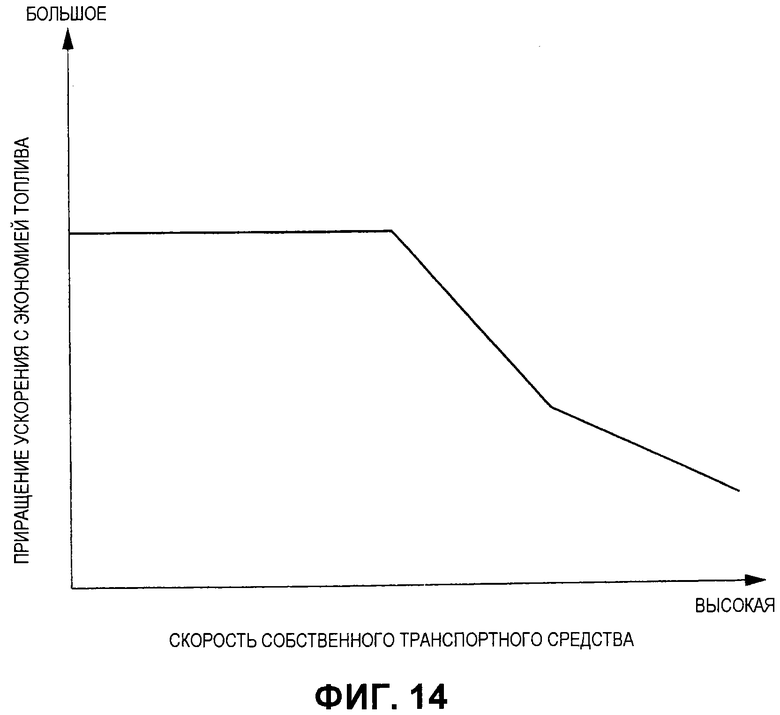
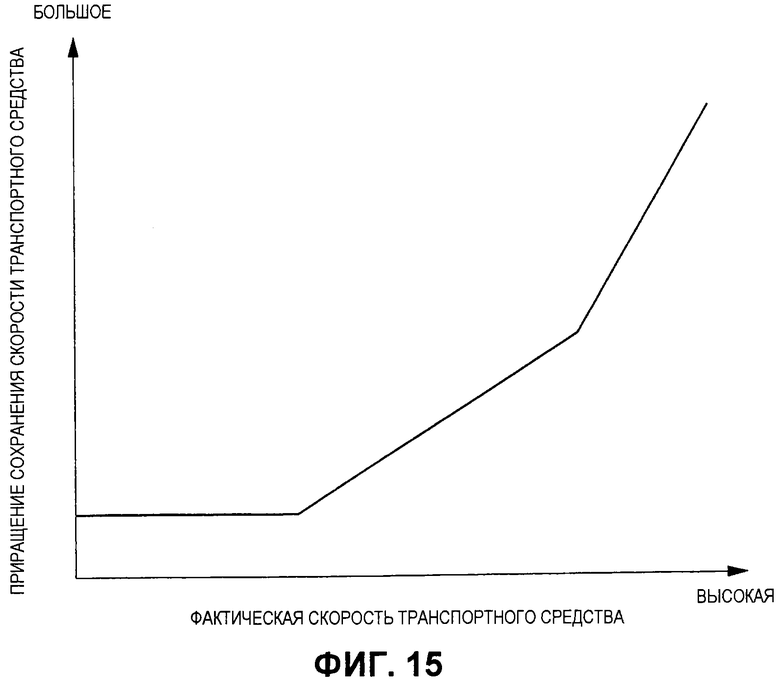
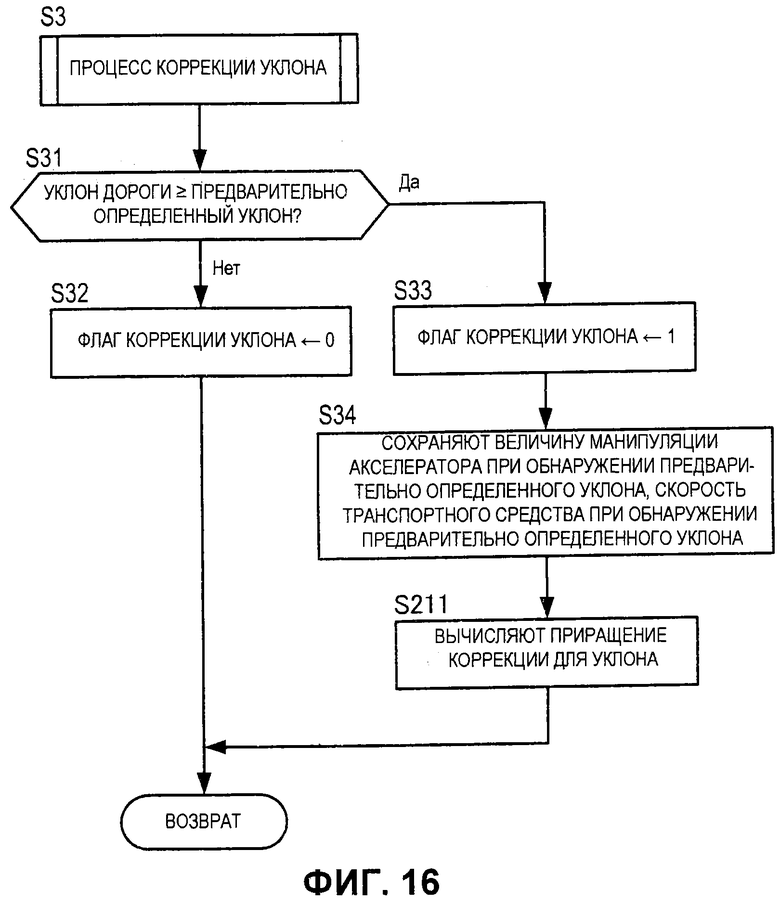
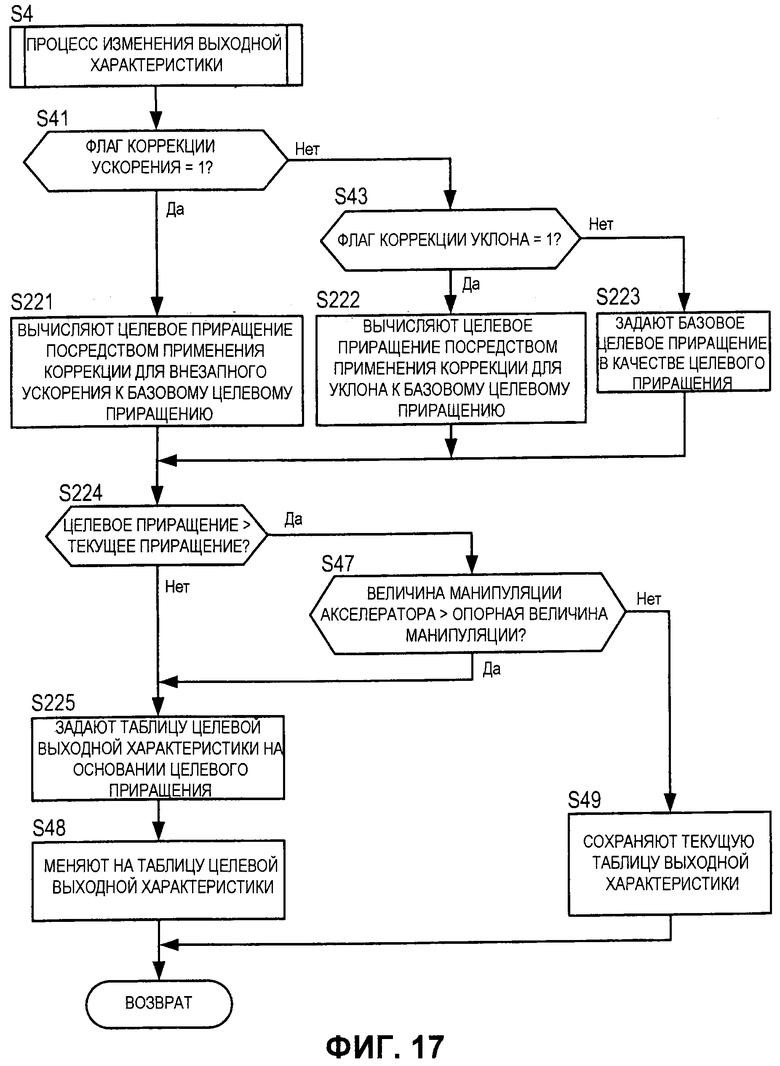
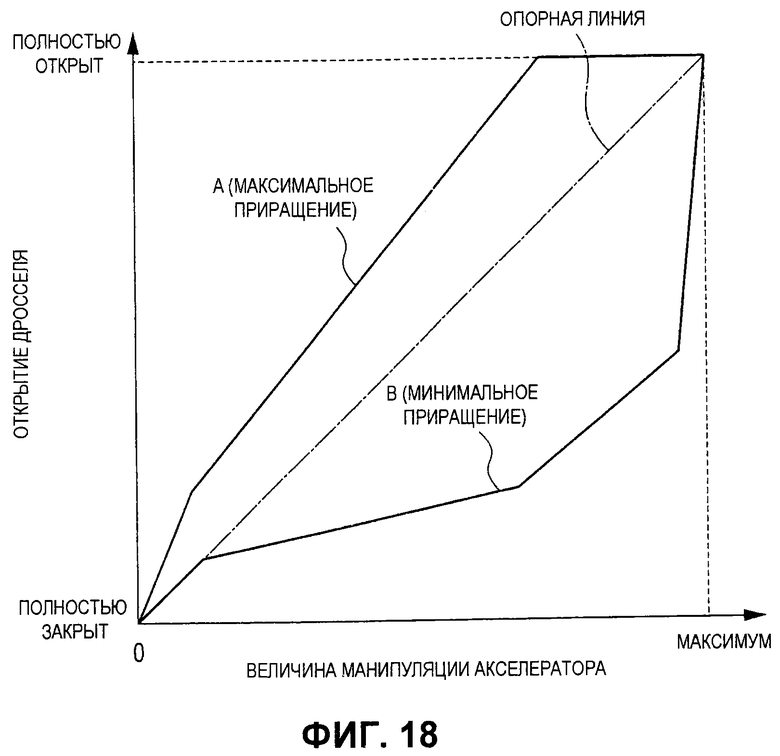
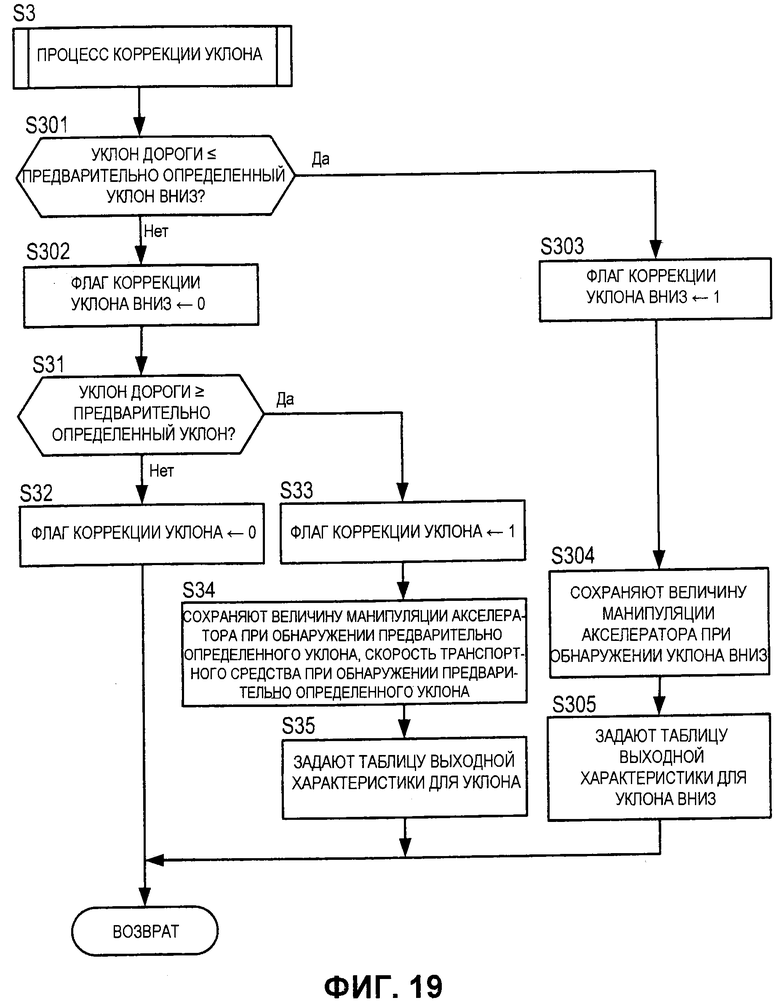
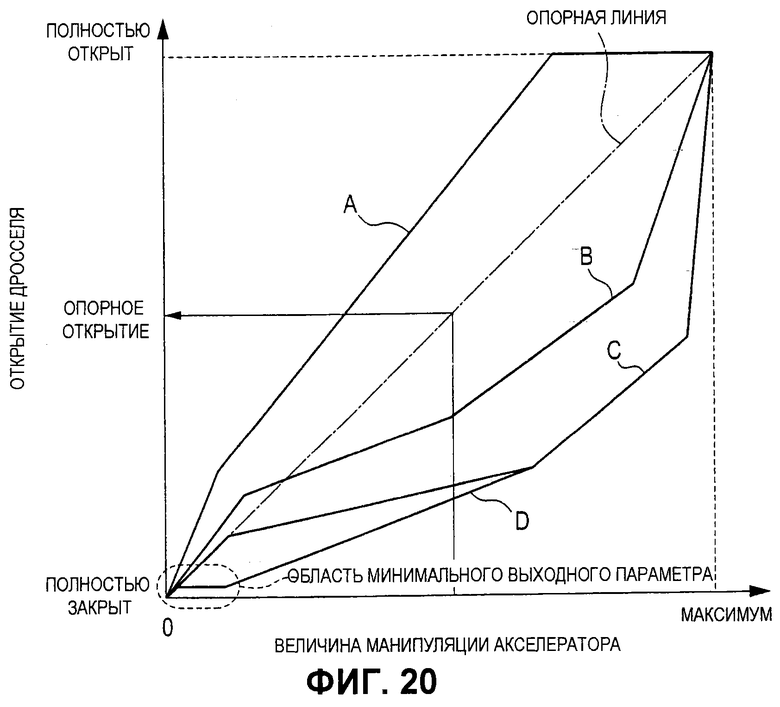
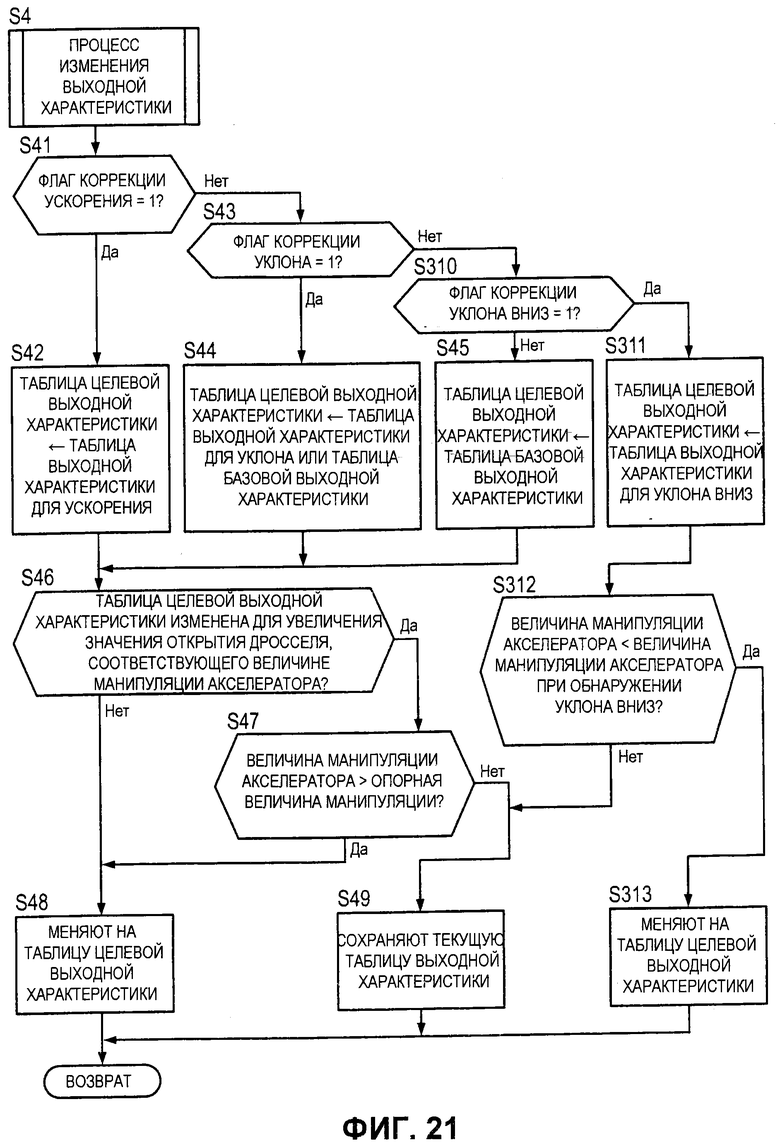
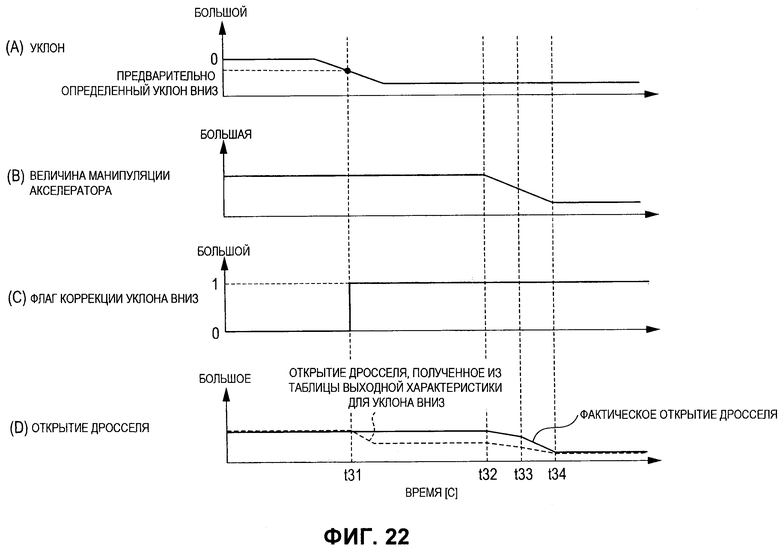
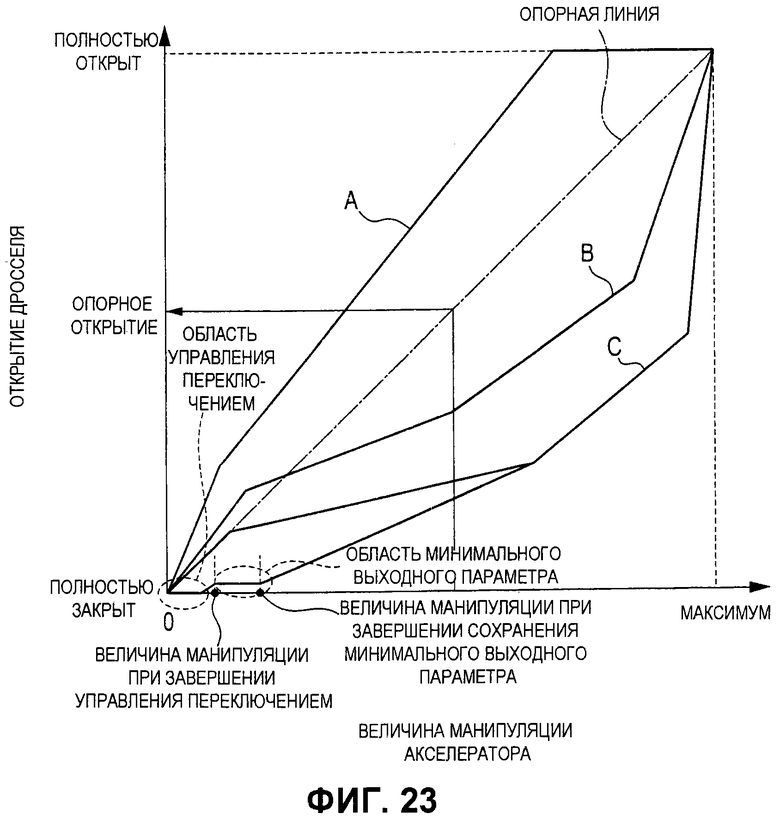
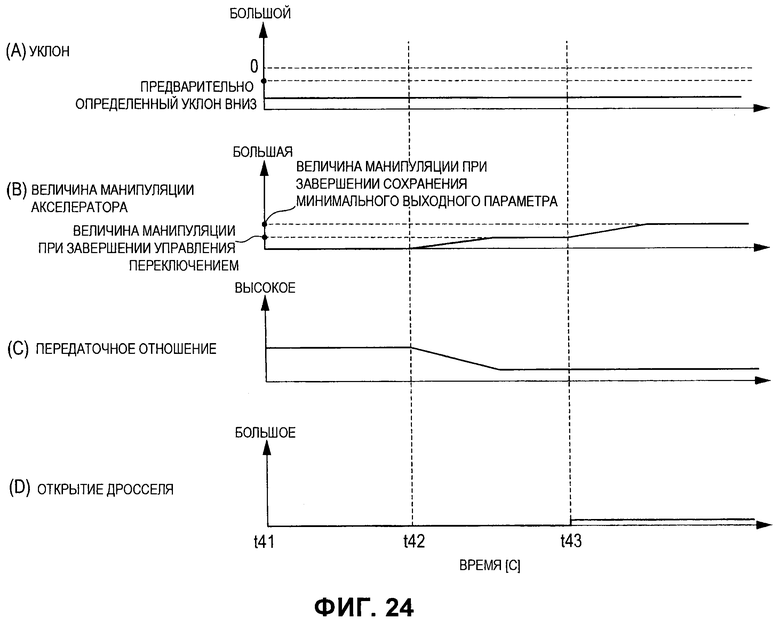
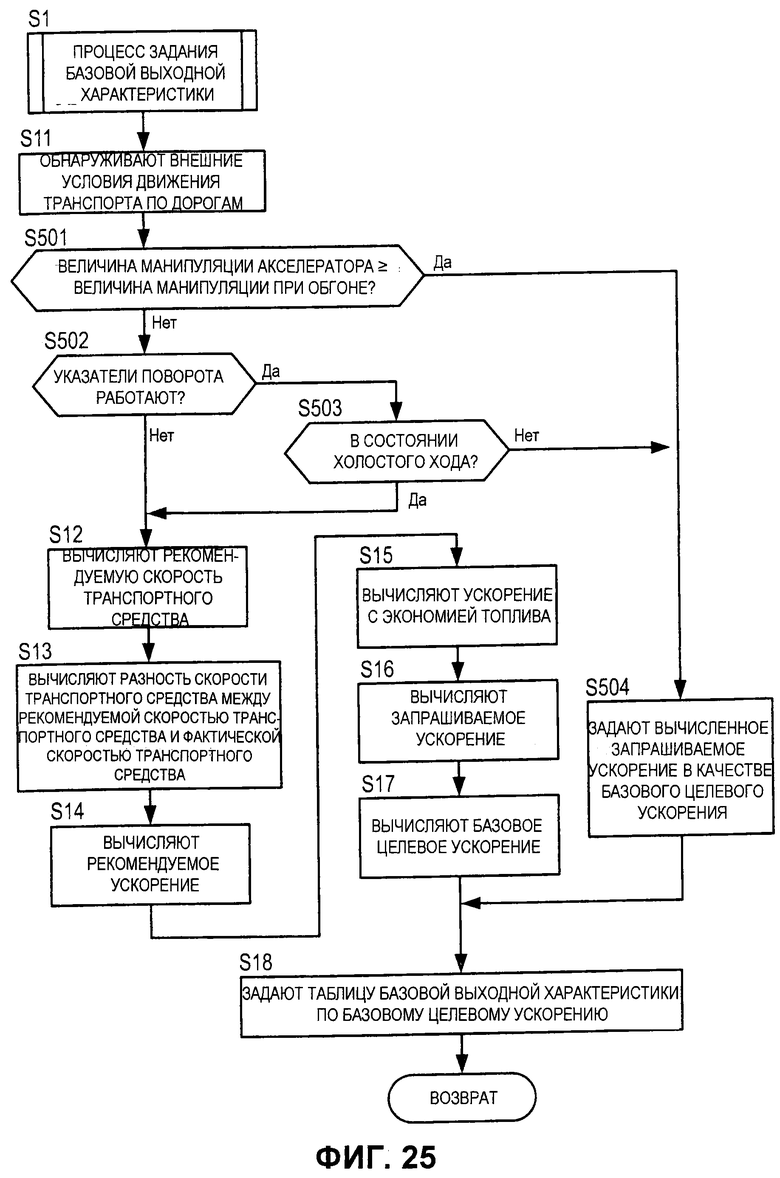
Изобретение может быть использовано в устройствах управления выходной характеристикой для двигателя внутреннего сгорания. Устройство управления выходной характеристикой для управления выходной характеристикой двигателя внутреннего сгорания, установленного на транспортном средстве, содержит блок обнаружения внешних условий движения транспорта по дорогам, блок вычисления рекомендуемой скорости транспортного средства, блок задания целевой выходной характеристики и блок изменения выходной характеристики. Блок обнаружения внешних условий движения транспорта по дорогам выполнен с возможностью обнаружения внешних условий движения транспорта по дорогам, в которых движется собственное транспортное средство. Блок вычисления рекомендуемой скорости транспортного средства выполнен с возможностью вычисления рекомендуемой скорости транспортного средства у собственного транспортного средства в обнаруженных внешних условиях движения транспорта по дорогам. Блок задания целевой выходной характеристики выполнен с возможностью уменьшения выходного параметра двигателя внутреннего сгорания, соответствующего величине манипуляции акселератора, по мере того как уменьшается разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства, и задания целевой выходной характеристики двигателя внутреннего сгорания до такой выходной характеристики, которая приемлема для постоянного движения с рекомендуемой скоростью транспортного средства, когда разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства становится по существу равной нулю. Блок изменения выходной характеристики выполнен с возможностью изменения выходной характеристики двигателя внутреннего сгорания на целевую выходную характеристику. Раскрыт вариант выполнения устройства управления выходной характеристикой для двигателя внутреннего сгорания. Технический результат заключается в устранении ухудшения экономии топлива из-за различий в технике вождения между водителями. 2 н. и 11 з.п. ф-лы, 25 ил.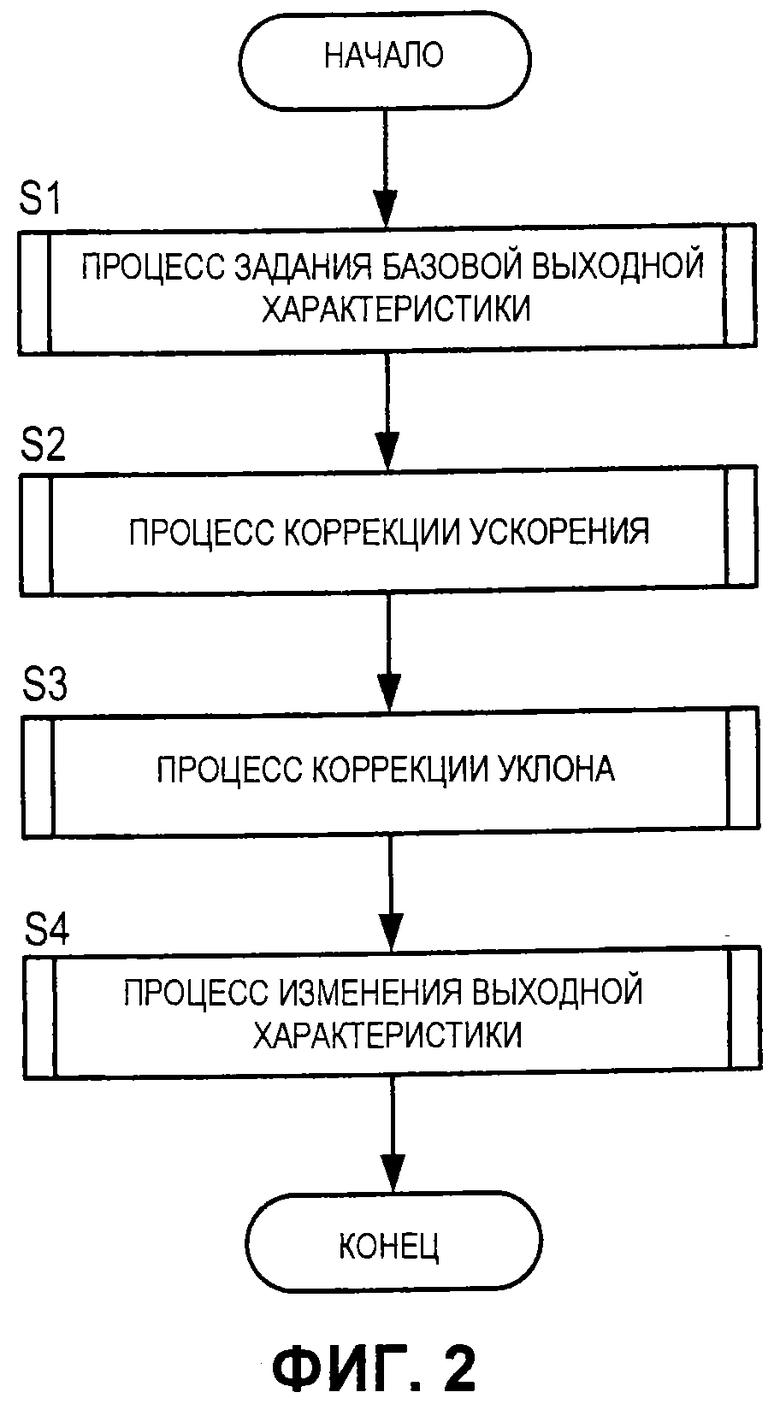
1. Устройство управления выходной характеристикой для управления выходной характеристикой двигателя внутреннего сгорания, установленного на транспортном средстве, содержащее:
блок обнаружения внешних условий движения транспорта по дорогам, выполненный с возможностью обнаружения внешних условий движения транспорта по дорогам, в которых движется собственное транспортное средство;
блок вычисления рекомендуемой скорости транспортного средства, выполненный с возможностью вычисления рекомендуемой скорости транспортного средства у собственного транспортного средства в обнаруженных внешних условиях движения транспорта по дорогам;
блок задания целевой выходной характеристики, выполненный с возможностью уменьшения выходного параметра двигателя внутреннего сгорания, соответствующего величине манипуляции акселератора по мере того, как уменьшается разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства, и задания целевой выходной характеристики двигателя внутреннего сгорания до такой выходной характеристики, которая приемлема для постоянного движения с рекомендуемой скоростью транспортного средства, когда разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства становится по существу равной нулю, и
блок изменения выходной характеристики, выполненный с возможностью изменения выходной характеристики двигателя внутреннего сгорания на целевую выходную характеристику.
2. Устройство управления выходной характеристикой для двигателя внутреннего сгорания по п. 1, дополнительно содержащее:
блок определения ускорения, выполненный с возможностью определения того, имеет или нет водитель намерение ускорить транспортное средство на основании манипуляции акселератора, и
блок коррекции во время ускорения, выполненный с возможностью коррекции целевой выходной характеристики двигателя внутреннего сгорания до такой характеристики, что выходной параметр двигателя внутреннего сгорания, соответствующий величине манипуляции акселератора, становится относительно большим, когда определяется, что водитель имеет намерение ускорить транспортное средство.
3. Устройство управления выходной характеристикой для двигателя внутреннего сгорания по п. 2, в котором:
блок коррекции во время ускорения завершает коррекцию, когда скорость транспортного средства увеличилась на предварительно определенную скорость транспортного средства, истекло предварительно определенное время или транспортное средство прошло предварительно определенное расстояние после того, как определено, что есть намерение ускорить транспортное средство.
4. Устройство управления выходной характеристикой для двигателя внутреннего сгорания по п. 2 или 3, в котором:
блок изменения выходной характеристики меняет выходную характеристику двигателя внутреннего сгорания на целевую выходную характеристику таким образом, что скорость реакции двигателя внутреннего сгорания, соответствующая величине манипуляции акселератора, становится относительно высокой, когда определено, что водитель имеет намерение ускорить транспортное средство.
5. Устройство управления выходной характеристикой для двигателя внутреннего сгорания по п. 1, дополнительно содержащее:
блок коррекции уклона, выполненный с возможностью коррекции целевой выходной характеристики двигателя внутреннего сгорания таким образом, что выходной параметр двигателя внутреннего сгорания, соответствующий величине манипуляции акселератора, увеличивается с увеличением уклона дороги.
6. Устройство управления выходной характеристикой для двигателя внутреннего сгорания по п. 1, в котором:
блок изменения выходной характеристики меняет выходную характеристику двигателя внутреннего сгорания на его целевую выходную характеристику, когда величина манипуляции акселератора становится больше величины манипуляции акселератора, когда была задана целевая выходная характеристика, если целевая выходная характеристика двигателя внутреннего сгорания является характеристикой для того, чтобы сделать выходной параметр двигателя внутреннего сгорания, соответствующий величине манипуляции акселератора, больше текущей выходной характеристики.
7. Устройство управления выходной характеристикой для двигателя внутреннего сгорания по п. 1, в котором:
блок изменения выходной характеристики постепенно меняет выходную характеристику двигателя внутреннего сгорания на целевую выходную характеристику.
8. Устройство управления выходной характеристикой для двигателя внутреннего сгорания по п. 1, дополнительно содержащее:
блок коррекции уклона вниз, выполненный с возможностью коррекции целевой выходной характеристики двигателя внутреннего сгорания для уменьшения выходного параметра двигателя внутреннего сгорания, соответствующего величине манипуляции акселератора, по мере того как уклон вниз становится круче, когда уклон дороги становится равным или меньше предварительно определенного уклона вниз.
9. Устройство управления выходной характеристикой для двигателя внутреннего сгорания по п. 8, в котором:
блок коррекции уклона вниз корректирует целевую выходную характеристику двигателя внутреннего сгорания таким образом, что выходной параметр двигателя внутреннего сгорания является предварительно определенным выходным параметром, незначительно выше выходного параметра, который необходим для сохранения состояния холостого хода, когда величина манипуляции акселератора не больше предварительно определенной первой величины манипуляции.
10. Устройство управления выходной характеристикой для двигателя внутреннего сгорания по п. 9, дополнительно содержащее:
блок управления передаточным отношением, выполненный с возможностью уменьшения передаточного отношения, когда педаль акселератора нажимается в состоянии, где транспортное средство движется под уклон по дороге, чей уклон не больше уклона вниз, при этом:
блок коррекции уклона вниз корректирует целевую выходную характеристику двигателя внутреннего сгорания таким образом, что выходной параметр двигателя внутреннего сгорания становится равным нулю, когда величина манипуляции акселератора не больше предварительно определенной второй величины манипуляции, которая меньше первой величины манипуляции.
11. Устройство управления выходной характеристикой для двигателя внутреннего сгорания по п. 1, дополнительно содержащее:
блок вычисления запрашиваемого ускорения, выполненный с возможностью вычисления ускорения, запрашиваемого водителем в соответствии с величиной манипуляции акселератора, при этом:
блок задания целевой выходной характеристики задает целевую выходную характеристику двигателя внутреннего сгорания на основании запрашиваемого ускорения, когда работают указатели поворота.
12. Устройство управления выходной характеристикой для двигателя внутреннего сгорания по п. 1, дополнительно содержащее:
блок вычисления запрашиваемого ускорения, выполненный с возможностью вычисления ускорения, запрашиваемого водителем, в соответствии с величиной манипуляции акселератора, при этом:
блок задания целевой выходной характеристики задает целевую выходную характеристику двигателя внутреннего сгорания на основании запрашиваемого ускорения, когда величина манипуляции акселератора не меньше предварительно определенной величины манипуляции при обгоне.
13. Устройство управления выходной характеристикой для управления выходной характеристикой двигателя внутреннего сгорания, установленного на транспортном средстве, содержащее:
блок обнаружения внешних условий движения транспорта по дорогам, выполненный с возможностью обнаружения внешних условий движения транспорта по дорогам, в которых движется собственное транспортное средство;
блок вычисления рекомендуемой скорости транспортного средства, выполненный с возможностью вычисления рекомендуемой скорости транспортного средства у собственного транспортного средства в обнаруженных внешних условиях движения транспорта по дорогам;
блок задания целевой выходной характеристики, выполненный с возможностью уменьшения выходного параметра двигателя внутреннего сгорания, соответствующего величине манипуляции акселератора по мере того, как уменьшается разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства, и задания целевой выходной характеристики двигателя внутреннего сгорания до такой выходной характеристики, которая приемлема для постоянного движения с рекомендуемой скоростью транспортного средства, когда разность скорости транспортного средства между рекомендуемой скоростью транспортного средства и скоростью собственного транспортного средства становится меньше, и
блок изменения выходной характеристики, выполненный с возможностью изменения выходной характеристики двигателя внутреннего сгорания на целевую выходную характеристику.
| JP 2010052561 A, 11.03.2010 | |||
| JP 2009275558 A, 26.11.2009 | |||
| JP 2008215237 A, 18.09.2008 | |||
| JP 2010284979 A, 24.12.2010 | |||
| US 2003236624 A1, 25.12.2003 | |||
| US 2002111733 A1, 15.08.2002 | |||
| АВТОМОБИЛЬ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2003 |
|
RU2290330C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2264549C2 |

