Изобретение относится к физической культуре и спорту, а именно к волейболу, и предназначено для тренировки атакующих ударов.
Все действия, в результате которых мяч направляется на сторону соперника, исключая подачу и блок, считаются атакующими. Для перехвата мяча, идущего от соперника вследствие произведения им атакующего удара, игроком вблизи сетки осуществляется вынос любой части тела выше верхнего края сетки, называемый блокированием. При блокировании игрок может переносить кисти и руки по другую сторону сетки, при условии, что это действие не мешает игре соперника [Официальные волейбольные правила 2013-2016 / Утверждены 33-м Конгрессом ФИВБ 2012].
Наибольшая реалистичность воспроизведения блока при тренировке атакующего удара может быть достигнута его реализацией на основе протезов рук.
Известен многофункциональный активный протез руки по патенту РФ №2026654, МПК A61F 2/56, содержащий наплечник, исполнительный орган, выполненный в виде трехзвенной шарнирно-рычажной цепи с тремя датчиками углов, датчики независимого управления и системы независимого управления исполнительным механизмом ротации искусственной кисти и исполнительным механизмом искусственной кисти, три системы управления связным движением исполнительных механизмов сгибания плеча, сгибания предплечья и сгибания искусственной кисти, каждая из которых содержит сумматор, два функциональных преобразователя, усилитель мощности и привод, задающий орган, выполненный в виде плоского трехзвенного кинематического аналога исполнительной цепи, содержащий три датчика управления связным движением.
Недостатками устройства являются невозможность выноса активного протеза руки выше верхнего края сетки ввиду отсутствия крепления наплечника к неподвижной опоре (стойке) и отсутствие компенсации погрешности положения исполнительного органа при резком внешнем воздействии на корпус.
Наиболее близким по технической сущности к заявляемому устройству и выбранным в качестве прототипа является многофункциональный активный протез руки, содержащий наплечник, исполнительный орган, выполненный в виде трехзвенной шарнирно-рычажной цепи с тремя датчиками углов, датчики независимого управления и системы независимого управления исполнительным механизмом ротации искусственной кисти и исполнительным механизмом искусственной кисти, три системы управления связным движением исполнительных механизмов сгибания-разгибания плеча, предплечья и искусственной кисти, каждая из которых содержит сумматор, два функциональных преобразователя, усилитель мощности и привод, задающий орган, выполненный в виде плоского трехзвенного кинематического аналога исполнительной цепи, содержащий три датчика управления связным движением, отличающийся тем, что он снабжен жестким креплением исполнительного органа и закрепленным на нем блоком коррекции положения звена плеча, содержащим последовательно соединенные акселерометр, блок двойного интегрирования и определитель угла коррекции, при этом определитель угла коррекции соединен с сумматором системы управления связным движением сгибания плеча, а жесткое крепление исполнительного органа зафиксировано на корпусе и выполнено с возможностью свободного перемещения надплечья с наплечником.
Недостатком способа-прототипа является невозможность его использования для блокирования атакующих ударов в волейболе ввиду отсутствия возможности выноса многофункционального активного протеза руки выше верхнего края сетки, а также его перемещения по игровому полю вдоль сетки. Недостаток обусловлен отсутствием жесткого крепления наплечника многофункционального активного протеза руки к неподвижной опоре (стойке) и механизма для его продольного перемещения вдоль сетки.
Задачей изобретения является создание блока, позволяющего обеспечить вынос многофункциональных активных протезов рук выше верхнего края сетки, в том числе при перемещении по игровому полю вдоль сетки, в целях его использования для блокирования атакующих ударов в волейболе.
Задача изобретения решается тем, что в блок, содержащий исполнительный орган, выполненный в виде трехзвенной шарнирно-рычажной цепи с тремя датчиками углов, три системы управления связным движением исполнительных механизмов сгибания-разгибания плеча, предплечья и искусственной кисти, каждая из которых содержит сумматор, два функциональных преобразователя, усилитель мощности и привод, жесткое крепление исполнительного органа и закрепленный на нем блок коррекции положения звена плеча, содержащий последовательно соединенные акселерометр, блок двойного интегрирования и определитель угла коррекции, дополнительно введены второй исполнительный орган, выполненный в виде трехзвенной шарнирно-рычажной цепи с тремя датчиками углов, три системы управления связным движением исполнительных механизмов сгибания-разгибания плеча, предплечья и искусственной кисти, жесткое крепление второго исполнительного органа, модуль продольного перемещения, выполненный в виде площадки, содержащей посадочные места для жестких креплений первого и второго исполнительных органов и роликовые механизмы для продольного перемещения, датчик перемещения, система управления модулем продольного перемещения и устройство управления блоком.
При этом первый выход устройства управления блоком соединен с системой управления связным движением первого исполнительного механизма сгибания-разгибания плеча, второй выход устройства управления блоком соединен с системой управления связным движением второго исполнительного механизма сгибания-разгибания плеча, третий выход устройства управления блоком соединен с системой управления связным движением первого исполнительного механизма сгибания-разгибания предплечья, четвертый выход устройства управления блоком соединен с системой управления связным движением второго исполнительного механизма сгибания-разгибания предплечья, пятый выход устройства управления блоком соединен с системой управления связным движением первого исполнительного механизма сгибания-разгибания искусственной кисти, шестой выход устройства управления блоком соединен с системой управления связным движением второго исполнительного механизма сгибания-разгибания искусственной кисти, седьмой выход устройства управления блоком соединен с системой управления модулем продольного перемещения.
Первый и второй выходы системы управления связным движением первого исполнительного механизма сгибания-разгибания плеча соединены с первым исполнительным механизмом сгибания-разгибания плеча, первый и второй выходы системы управления связным движением второго исполнительного механизма сгибания-разгибания плеча соединены со вторым исполнительным механизмом сгибания-разгибания плеча. Первый и второй выходы системы управления связным движением первого исполнительного механизма сгибания-разгибания предплечья соединены с первым исполнительным механизмом сгибания-разгибания предплечья, первый и второй выходы системы управления связным движением второго исполнительного механизма сгибания-разгибания предплечья соединены со вторым исполнительным механизмом сгибания-разгибания предплечья. Первый и второй выходы системы управления связным движением первого исполнительного механизма сгибания-разгибания искусственной кисти соединены с первым исполнительным механизмом сгибания-разгибания искусственной кисти, первый и второй выходы системы управления связным движением второго исполнительного механизма сгибания-разгибания искусственной кисти соединены со вторым исполнительным механизмом сгибания-разгибания искусственной кисти. Первый и второй выходы системы управления модулем продольного перемещения соединены с роликовыми механизмами для продольного перемещения.
Первый и второй выходы датчика углов первого исполнительного механизма сгибания-разгибания плеча соединены с первым исполнительным механизмом сгибания-разгибания плеча, третий выход датчика углов первого исполнительного механизма сгибания-разгибания плеча соединен с системой управления связным движением первого исполнительного механизма сгибания-разгибания плеча. Первый и второй выходы датчика углов второго исполнительного механизма сгибания-разгибания плеча соединены со вторым исполнительным механизмом сгибания-разгибания плеча, третий выход датчика углов второго исполнительного механизма сгибания-разгибания плеча соединен с системой управления связным движением второго исполнительного механизма сгибания-разгибания плеча. Первый и второй выходы датчика углов первого исполнительного механизма сгибания-разгибания предплечья соединены с первым исполнительным механизмом сгибания-разгибания предплечья, третий выход датчика углов первого исполнительного механизма сгибания-разгибания предплечья соединен с системой управления связным движением первого исполнительного механизма сгибания-разгибания предплечья. Первый и второй выходы датчика углов второго исполнительного механизма сгибания-разгибания предплечья соединены со вторым исполнительным механизмом сгибания-разгибания предплечья, третий выход датчика углов второго исполнительного механизма сгибания-разгибания предплечья соединен с системой управления связным движением второго исполнительного механизма сгибания-разгибания предплечья. Первый и второй выходы датчика углов первого исполнительного механизма сгибания-разгибания искусственной кисти соединены с первым исполнительным механизмом сгибания-разгибания искусственной кисти, третий выход датчика углов первого исполнительного механизма сгибания-разгибания искусственной кисти соединен с системой управления связным движением первого исполнительного механизма сгибания-разгибания искусственной кисти. Первый и второй выходы датчика углов второго исполнительного механизма сгибания-разгибания искусственной кисти соединены со вторым исполнительным механизмом сгибания-разгибания искусственной кисти, третий выход датчика углов второго исполнительного механизма сгибания-разгибания искусственной кисти соединен с системой управления связным движением второго исполнительного механизма сгибания-разгибания искусственной кисти. Первый и второй выходы датчика перемещения соединены с роликовыми механизмами для продольного перемещения, третий выход датчика перемещения соединен с системой управления модулем продольного перемещения.
Выход блока коррекции положения звена плеча соединен с системами управления связным движением первого и второго исполнительных механизмов сгибания-разгибания плеча.
Благодаря новой совокупности существенных признаков в предложенном устройстве обеспечивается вынос многофункциональных активных протезов рук выше верхнего края сетки, в том числе при перемещении по игровому полю вдоль сетки, и, как следствие, возможность его использования для блокирования атакующих ударов в волейболе.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного способа условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного объекта, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность отличительных существенных признаков, обусловливающих тот же технический результат, который достигнут в заявляемом способе. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Заявляемое устройство поясняется чертежами, на которых показаны:
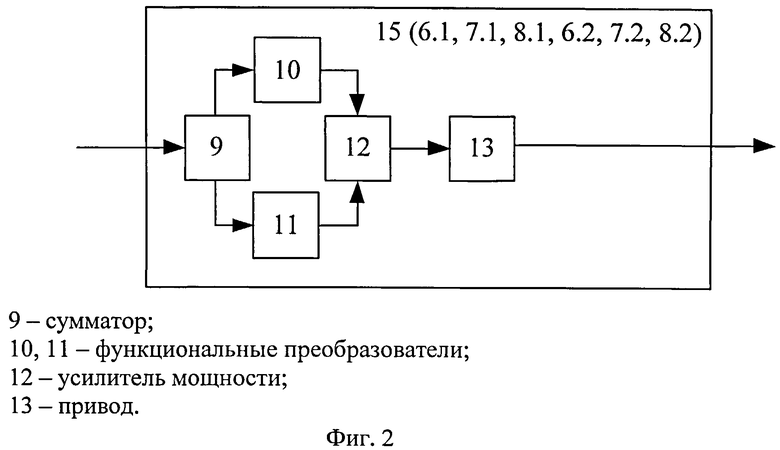
Фиг. 1 - структурная схема блока;
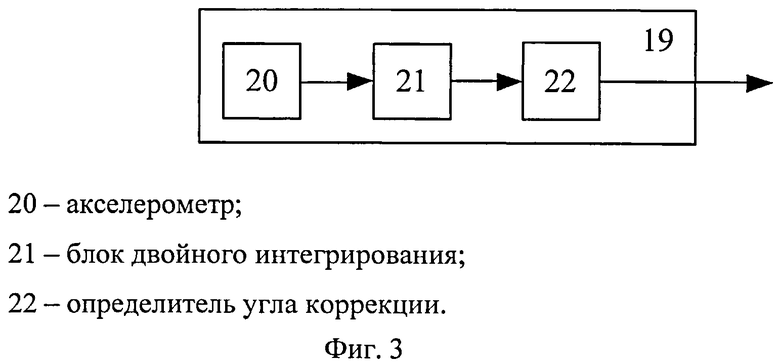
Фиг. 2 - структурная схема системы управления связным движением исполнительных механизмов;
Фиг. 3 - структурная схема блока коррекции положения звена плеча.
Сущность изобретения поясняется фиг. 1, на которой представлена структурная схема блока, обеспечивающего эмуляцию действий блокирующего игрока.
Блок содержит два исполнительных органа 2.1 и 2.2, выполненных в виде трехзвенных шарнирно-рычажных цепей. Шарнирно-рычажные механизмы, образующие исполнительные органы 2.1 и 2.2, известны и представлены, например, в книге Веркович Г.А., Головенкина Е.Н. Справочник конструктора точного приборостроения. - Л.: Машиностроения. Ленинградское отделение, 1989 г., с. 220. Первый исполнительный орган 2.1 с тремя датчиками углов 3.1, 4.1, 5.1 и тремя системами управления связным движением исполнительных механизмов сгибания-разгибания плеча 6.1, предплечья 7.1 и искусственной кисти 8.1 имеет жесткое крепление 1.1 с модулем продольного перемещения 18. Второй исполнительный орган 2.2 с тремя датчиками углов 3.2, 4.2, 5.2 и тремя системами управления связным движением исполнительных механизмов сгибания-разгибания плеча 6.2, предплечья 7.2 и искусственной кисти 8.2 имеет жесткое крепление 1.2 с модулем продольного перемещения 18.
Модуль продольного перемещения 18, выполненный в виде площадки, содержит посадочные места для жестких креплений первого 1.1 и второго 1.2 исполнительных органов и роликовые механизмы для продольного перемещения 16.1 и 16.2, датчик перемещения 14 и систему управления модулем продольного перемещения 15.
Устройство управления блоком 17, соединенное с системами управления связным движением обоих исполнительных механизмов 6.1, 7.1, 8.1, 6.2, 7.2, 8.2 и системой управления модулем продольного перемещения 15, предназначено для подачи на них управляющих команд. Устройство управления блоком может быть реализовано на известных устройствах сходящихся вычислений, в частности, на комплексных умножителях PDSP16112A (Mitel) и комплексных накопителях PDSP16318A (Mitel), и устройствах оперативной памяти (ОЗУ). Схемы ОЗУ известны и описаны, например, в книге В.Н. Вениаминова, О.Н. Лебедева, А.И. Мирошниченко. Микросхемы и их применение. М.: Радио и связь, 1989. - с. 146. В частности, ОЗУ может быть реализовано на микросхемах К565 серии.
Каждая из систем управления связным движением исполнительных механизмов сгибания-разгибания плеча, предплечья и искусственной кисти 6.1, 7.1, 8.1, 6.2, 7.2, 8.2 и система управления модулем продольного перемещения 15 (фиг. 2) содержат сумматор 9, два функциональных преобразователя 10, 11, усилитель мощности 12 и привод 13. Сумматор 9, функциональные преобразователи 10, 11, блок двойного интегрирования 21 могут быть реализованы на основе арифметическо-логических устройств (АЛУ). Схемы АЛУ известны и описаны, например, в книге Шило В.Л. Популярные цифровые микросхемы. - М.: Радио и связь, 1987. - С. 273 - 275, рис. 2.70. В частности, такая схема может быть реализована на микросхемах К564ИПЗ. Усилитель мощности 12 является известным устройством и описан, например, в книге Волкова М.А., Ефремова А.Д., Басова О.О. Основы схемотехники: учебное пособие; под общ. ред. Б.Р. Иванова. - Орел: Академия ФСО России, 2012, с. 108-115.
Блок коррекции положения звена плеча 19 (фиг. 3) закреплен на жестком креплении исполнительного органа, находящегося на модуле продольного перемещения 18. Он содержит последовательно соединенные акселерометр 20, блок двойного интегрирования 21 и определитель угла коррекции 22, при этом определитель угла коррекции 22 соединен с системами управления связным движением первого 6.1 и второго 6.2 исполнительных механизмов сгибания-разгибания плеча. Датчики углов 3.1, 3.2, 4.1, 4.2, 5.1, 5.2, перемещения 14, акселерометр 20 и определитель угла коррекции 22 являются известными устройствами и описаны, например, в [Крауиньш Д.П. Автоматизированный привод. Лекция 6. «Датчики автоматизированных электроприводов» // Томский политехнический университет. Кафедра «Автоматизация и роботизация в машиностроении»].
Устройство имеет каналы управления движением исполнительных механизмов, а также канал коррекции положения звена плеча.
Устройство работает следующим образом.
Управление исполнительными органами 2.1, 2.2 и модулем продольного перемещения 18 осуществляется посредством подачи управляющих команд по каналам управления от устройства управления блоком 17 на системы управления связным движением исполнительных механизмов сгибания-разгибания плеча, предплечья и искусственной кисти 6.1, 7.1, 8.1, 6.2, 7.2, 8.2 и систему управления модулем продольного перемещения 15, куда также поступают сигналы соответственно с датчиков обратной связи - датчиков углов 3.1, 4.1, 5.1, 3.2, 4.2, 5.2 и датчика перемещения 14.
Каждая из данных систем представляет собой позиционную следящую систему с управлением движением исполнительного механизма по рассогласованию. Так, например, управляющая команда от устройства управления блоком 17 поступает на сумматор 9 системы управления связным движением первого исполнительного механизма сгибания-разгибания плеча 6.1, и одновременно на сумматор поступает сигнал с датчика угла 3.1. Сумматор 9 выполняет функцию сравнения величин сигналов, определяя величину рассогласования угловых положений задающей и исполнительной части. Сигнал с сумматора 9 после преобразования посредством функциональных преобразователей 10, 11 поступает на усилитель мощности 12, который управляет работой привода 13, соединенного с исполнительным механизмом сгибания-разгибания плеча. Отработка угла, заданного управляющей командой от устройства управления блоком 17, завершится в тот момент, когда величина рассогласования с сигналом датчика 3.1 обратной связи будет равна нулю. При этом привод остановится.
Принцип работы остальных систем управления связным движением исполнительных механизмов аналогичен, за исключением системы управления модулем продольного перемещения 15. Данное устройство определяет величину рассогласования не угловых, а линейных положений задающей и исполнительной части, сравнивая значение управляющей команды от устройства управления блоком 17 с сигналом, поступающим с датчика перемещения 14. При этом модуль продольного перемещения 18 продолжает движение вдоль сетки до тех пор, пока величина рассогласования между значениями управляющей команды от устройства управления блоком 17 и сигнала, поступающего с датчика перемещения 14, не будет равна нулю.
Компенсация погрешности положения исполнительных органов при резком внешнем воздействии на блок, включая и воздействие модуля продольного перемещения 18, реактивный момент которого при пуске воспринимается как внешнее воздействие, реализуется следующим образом. Активный (приводной) шарнир сгибания плеча воспринимает нагрузку от веса всего исполнительного органа и сил, возникающих в процессе движения звеньев исполнительных устройств. Нагрузка, вызванная действием реактивных моментов, действующая в точке крепления исполнительного органа, оказывает наибольшее влияние на точность выполнения движений. Исполнительный орган при движении модуля продольного перемещения 18 по игровому полю вдоль сетки оказывает воздействие на точку крепления благодаря реактивному моменту движущейся системы. Сила, действующая в точке крепления, направлена горизонтально, наибольшее значение это воздействие имеет при пуске с большим ускорением, то есть при большом рассогласовании задающего сигнала и сигнала обратной связи, а также при наибольшем моменте инерции устройства - вытянутой искусственной руки. Сила, действующая в точке крепления, воспринимается как внешнее воздействие, время реакции на которое (латентный период) составляет ориентировочно 0,2 с. За это время точка крепления исполнительного органа совершает неконтролируемое движение, которое вызывает погрешность в ориентации искусственной руки. Величина смещения точки крепления зависит от массы подвижной части исполнительного органа, значения углов его механизмов сгибания-разгибания и величины ускорения модуля продольного перемещения 18. Зная величину ускорения, можно определить величину смещения точки крепления исполнительного органа за время латентного периода.
Величина ускорения в предлагаемом устройстве определяется с помощью датчика ускорений - акселерометра 20, который входит в состав блока коррекции 19. Сигнал от акселерометра, пропорциональный величине линейного ускорения, поступает в блок двойного интегрирования 21, который вырабатывает сигнал, пропорциональный величине смещения точки крепления. Далее сигнал подается в определитель угла коррекции 22, который вырабатывает сигнал, пропорциональный величине угла, на который необходимо довернуть привод плеча, чтобы компенсировать отклонение концевого звена. Функция определителя угла коррекции (ω) может быть представлена формулой: 
Сигнал, пропорциональный углу коррекции, поступает на сумматор 9 в качестве дополнительного сигнала управления. Здесь происходит суммирование всех поступающих сигналов управления, а после преобразования и усиления сигнал поступает на привод, соединенный с исполнительным механизмом сгибания-разгибания плеча. Коррекция выполняется автоматически и компенсирует отклонение, вызванное внешним воздействием.
Следовательно, предлагаемое изобретение позволяет обеспечить вынос многофункциональных активных протезов рук выше верхнего края сетки, в том числе при перемещении по игровому полю вдоль сетки, и как следствие, обеспечить его использование для блокирования атакующих ударов в волейболе.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 2010 |
|
RU2427349C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1991 |
|
RU2026654C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068246C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Многофункциональный активный протезРуКи | 1979 |
|
SU806022A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук | 2020 |
|
RU2735986C1 |
| Способ персонализированной физической реабилитации больных с двигательными нарушениями лучезапястных суставов и пальцев кисти | 2020 |
|
RU2739699C1 |
Изобретение относится к физической культуре и спорту, а именно к волейболу, и предназначено для тренировки атакующих ударов. Задачей изобретения является создание блока, позволяющего обеспечить вынос многофункциональных активных протезов рук выше верхнего края сетки, в целях его использования для блокирования атакующих ударов в волейболе. Указанный технический результат достигается эмуляцией действий блокирующего игрока с использованием многофункциональных активных протезов рук за счет их жесткого крепления на модуле продольного перемещения, выполненного в виде площадки, при этом управление перемещением блока, а также выносом рук над уровнем сетки осуществляется посредством устройства управления блоком. 3 ил.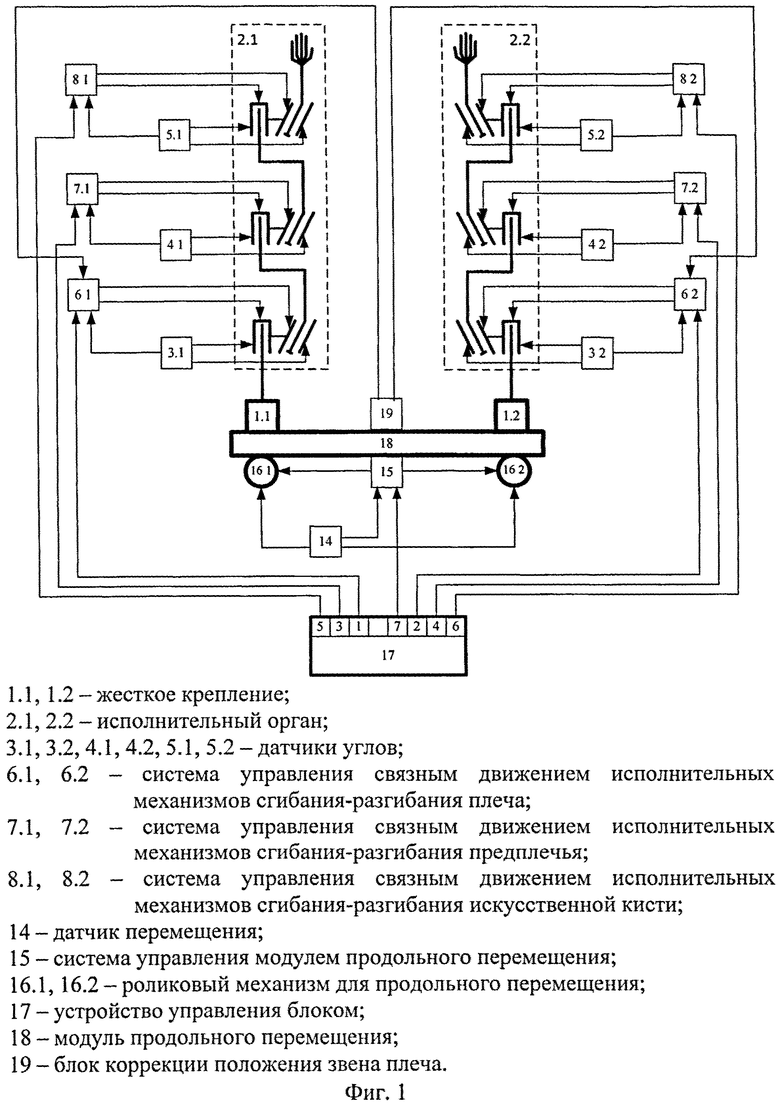
Блок, содержащий исполнительный орган, выполненный в виде трехзвенной шарнирно-рычажной цепи с тремя датчиками углов, три системы управления связным движением исполнительных механизмов сгибания-разгибания плеча, предплечья и искусственной кисти, каждая из которых содержит сумматор, два функциональных преобразователя, усилитель мощности и привод, жесткое крепление исполнительного органа и закрепленный на нем блок коррекции положения звена плеча, содержащий последовательно соединенные акселерометр, блок двойного интегрирования и определитель угла коррекции, отличающийся тем, что введены второй исполнительный орган, выполненный в виде трехзвенной шарнирно-рычажной цепи с тремя датчиками углов, три системы управления связным движением исполнительных механизмов сгибания-разгибания плеча, предплечья и искусственной кисти, жесткое крепление второго исполнительного органа, модуль продольного перемещения, выполненный в виде площадки, содержащей посадочные места для жестких креплений первого и второго исполнительных органов и роликовые механизмы для продольного перемещения, датчик перемещения, система управления модулем продольного перемещения и устройство управления блоком, при этом первый выход устройства управления блоком соединен с системой управления связным движением первого исполнительного механизма сгибания-разгибания плеча, второй выход устройства управления блоком соединен с системой управления связным движением второго исполнительного механизма сгибания-разгибания плеча, третий выход устройства управления блоком соединен с системой управления связным движением первого исполнительного механизма сгибания-разгибания предплечья, четвертый выход устройства управления блоком соединен с системой управления связным движением второго исполнительного механизма сгибания-разгибания предплечья, пятый выход устройства управления блоком соединен с системой управления связным движением первого исполнительного механизма сгибания-разгибания искусственной кисти, шестой выход устройства управления блоком соединен с системой управления связным движением второго исполнительного механизма сгибания-разгибания искусственной кисти, седьмой выход устройства управления блоком соединен с системой управления модулем продольного перемещения, первый и второй выходы системы управления связным движением первого исполнительного механизма сгибания-разгибания плеча соединены с первым исполнительным механизмом сгибания-разгибания плеча, первый и второй выходы системы управления связным движением второго исполнительного механизма сгибания-разгибания плеча соединены со вторым исполнительным механизмом сгибания-разгибания плеча, первый и второй выходы системы управления связным движением первого исполнительного механизма сгибания-разгибания предплечья соединены с первым исполнительным механизмом сгибания-разгибания предплечья, первый и второй выходы системы управления связным движением второго исполнительного механизма сгибания-разгибания предплечья соединены со вторым исполнительным механизмом сгибания-разгибания предплечья, первый и второй выходы системы управления связным движением первого исполнительного механизма сгибания-разгибания искусственной кисти соединены с первым исполнительным механизмом сгибания-разгибания искусственной кисти, первый и второй выходы системы управления связным движением второго исполнительного механизма сгибания-разгибания искусственной кисти соединены со вторым исполнительным механизмом сгибания-разгибания искусственной кисти, первый и второй выходы системы управления модулем продольного перемещения соединены с роликовыми механизмами для продольного перемещения, первый и второй выходы датчика углов первого исполнительного механизма сгибания-разгибания плеча соединены с первым исполнительным механизмом сгибания-разгибания плеча, третий выход датчика углов первого исполнительного механизма сгибания-разгибания плеча соединен с системой управления связным движением первого исполнительного механизма сгибания-разгибания плеча, первый и второй выходы датчика углов второго исполнительного механизма сгибания-разгибания плеча соединены со вторым исполнительным механизмом сгибания-разгибания плеча, третий выход датчика углов второго исполнительного механизма сгибания-разгибания плеча соединен с системой управления связным движением второго исполнительного механизма сгибания-разгибания плеча, первый и второй выходы датчика углов первого исполнительного механизма сгибания-разгибания предплечья соединены с первым исполнительным механизмом сгибания-разгибания предплечья, третий выход датчика углов первого исполнительного механизма сгибания-разгибания предплечья соединен с системой управления связным движением первого исполнительного механизма сгибания-разгибания предплечья, первый и второй выходы датчика углов второго исполнительного механизма сгибания-разгибания предплечья соединены со вторым исполнительным механизмом сгибания-разгибания предплечья, третий выход датчика углов второго исполнительного механизма сгибания-разгибания предплечья соединен с системой управления связным движением второго исполнительного механизма сгибания-разгибания предплечья, первый и второй выходы датчика углов первого исполнительного механизма сгибания-разгибания искусственной кисти соединены с первым исполнительным механизмом сгибания-разгибания искусственной кисти, третий выход датчика углов первого исполнительного механизма сгибания-разгибания искусственной кисти соединен с системой управления связным движением первого исполнительного механизма сгибания-разгибания искусственной кисти, первый и второй выходы датчика углов второго исполнительного механизма сгибания-разгибания искусственной кисти соединены со вторым исполнительным механизмом сгибания-разгибания искусственной кисти, третий выход датчика углов второго исполнительного механизма сгибания-разгибания искусственной кисти соединен с системой управления связным движением второго исполнительного механизма сгибания-разгибания искусственной кисти, первый и второй выходы датчика перемещения соединены с роликовыми механизмами для продольного перемещения, третий выход датчика перемещения соединен с системой управления модулем продольного перемещения, выход блока коррекции положения звена плеча соединен с системами управления связным движением первого и второго исполнительных механизмов сгибания-разгибания плеча.
| Сребренная поверхность теплообмена | 1958 |
|
SU127620A1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1991 |
|
RU2026654C1 |
| US 2009137349 A1, 28.05.2009 | |||
| WO 2007053054 A1, 10.05.2007 | |||

