Изобретение «Электромагнитный измеритель течений» (ЭМИТ) относится к измерителям скорости и направления течений в морях и пресноводных водоемах на различных глубинах в составе автономных буйковых станций и других неподвижных (малоподвижных) носителей и может применяться при гидрологических исследованиях и инженерных изысканиях в обеспечение строительства гидротехнических сооружений. В ходе выполнения Государственной программы Российской Федерации "Социально-экономическое развитие Арктической зоны Российской Федерации на период до 2020 года" предусмотрены мероприятия по обеспечению данными комплексных исследований морской среды, океанов и морей для осуществлении различных видов морской деятельности Российской Федерации (добычи минеральных ресурсов, мореплавания по Северному морскому пути, рыболовства, морского флота и обороны страны).
Одними из важнейших задач по исследованию Арктики являются изучение гидрологического режима вод и течений Северного ледовитого океана, выявление закономерностей дрейфа льдов. Для решения этих задач необходимы измерители течений, способные автономно работать в течение одного года - от навигации до навигации - в диапазоне температур от минус двух градусов до плюс 8 градусов. Инструментальные определения скорости и направления течения совершенно необходимы для верификации различных моделей трехмерного поля скорости течения, которая осуществляется путем сличения результатов измерений и расчетных данных в заданных точках акватории.
Заявитель, ФГБУН «Морской гидрофизический институт РАН», и ООО «Марлин-Юг» участвуют в работах по исследованию арктического бассейна, создавая и применяя приборы, свободно дрейфующие и устанавливаемые на дрейфующих ледовых полях [Опыт применения термопрофилирующих дрифтеров для исследований арктического региона Мирового океана. Арктика: экология и экономика, №1 (21), 2016].
Практически все электромагнитные измерители скорости электропроводной жидкости измеряют проекции (компоненты) вектора скорости течения на несколько осей между парами электродов, находящихся в магнитном поле и обтекаемых исследуемым потоком. Модуль вектора скорости и его направление потом определяются через компоненты вектора скорости течения. В электромагнитных датчиках расхода жидкости для определения скорости потока достаточно одной пары электродов, находящихся в магнитном поле и помещенных в какой-либо канал, а расход вычисляется с учетом сечения канала.
Учитывая специфику длительных измерений скорости и направления течений в природных водных массах, обладающих достаточно высокой биологической продуктивностью и несущих мелкий рыхлый лед (шуга), прибор не должен иметь внешних по отношению к корпусу подвижных элементов измерительного тракта, подверженных обрастанию и механическим повреждениям, должен быть стойким к действию абразивных частиц взвеси, которых много в прибрежной зоне морей вследствие их выноса реками на значительные расстояния, быть коррозионно-устойчивым по отношению к морской воде.
Известен Magnetic flow sensor [патент США №6,085,599, МПК G01F 1/58, опубл. 11.07.2000] - магнитный датчик для измерения расхода потока электропроводной жидкости. Датчик включает: корпус, расположенный в потоке жидкости; по крайней мере две пары постоянных магнитов, объединенных в магнитный блок, который расположен внутри корпуса для обеспечения магнитного потока, ортогонального направлению потока жидкости; привод механического перемещения магнитов и чередования полярности магнитного потока для получения переменного электрического напряжения в жидкости, имеющего величину, пропорциональную скорости потока жидкости; по крайней мере два электрода для контакта с жидкостью и съема напряжения переменного тока, закрепленные на корпусе и расположенные друг против друга на противоположных сторонах проточной части перпендикулярно направлению потока жидкости.
Этот аналог имеет следующие признаки, сходные с существенными признаками заявленного изобретения: цилиндрический немагнитный корпус, в котором установлен с возможностью вращения относительно его оси магнитный блок из по крайней мере двух пар постоянных магнитов с чередующейся полярностью; закрепленные на корпусе и подключенные к блоку электроники несколько пар электродов, рабочие поверхности которых расположены в потоке жидкости в зоне поля магнитного блока.
Этот датчик при всем разнообразии его исполнений (58 вариантов) имеет ряд существенных недостатков.
Недостатками этого типа датчика являются следующие:
- расположение электродов вблизи плоского дна корпуса приемлемо только при расположении датчика в каком-либо канале, когда исключается набегание потока на корпус под углом, существенно отличающимся от 90° относительно его оси; в противном случае образуется сильно турбулизированная область около электродов, искажающая поле скорости потока, вследствие влияния перехода плоское дно - цилиндрическая поверхность корпуса; но даже при 90° этот переход вносит серьезные искажения потока;
- отсутствие концентраторов магнитного поля, в силу выбранной ориентации магнитов, и, как следствие, пониженная чувствительность измерителя;
- избыточное число электродов при измерении двух компонент вектора скорости течения - восемь электродов (вместо оптимально четырех, как в заявляемом изобретении);
- минимальное число магнитов для данного способа создания переменного магнитного поля - четыре магнита; большее число магнитов позволяет уменьшить скорость вращения магнитной системы и снизить потребление энергии электродвигателем или, не изменяя скорость, увеличить частоту модуляции, что необходимо при большой временной изменчивости исследуемого потока.
Известна поданная на государственную регистрацию разработка заявителя - изобретение «Электромагнитный измеритель компонент вектора скорости течения электропроводной жидкости» [заявка №2014152775/28(084350), дата подачи заявки 24.12.2014, авторы: В.А. Барабаш, М.С. Воликов, В.З. Дыкман]. Это техническое решение по совокупности признаков является наиболее близким к заявляемому изобретению и поэтому выбрано в качестве прототипа.
Прототип содержит следующие признаки, совпадающие с существенными признаками изобретения: прочный цилиндрический немагнитный корпус удлиненной формы с заданным соотношением длины и диаметра, в котором установлен с возможностью вращения относительно его оси магнитный блок из по крайней мере двух пар постоянных магнитов с чередующейся полярностью, ориентированных так, что магнитное поле направлено вдоль оси вращения магнитного блока; закрепленные на корпусе несколько пар электродов, рабочие поверхности которых расположены в жидкости в зоне концентрации поля магнитного блока; на каждом из магнитов на его полюсах закреплены наконечники из магнитомягкого материала, свободные концы которых расположены на заданном расстоянии от рабочих поверхностей электродов.
При всех своих положительных свойствах, обеспечивающих надежность работы при океанографических измерениях, прототип имеет один существенный недостаток: для обеспечения вращения магнитного блока в конструкции прототипа используется микродвигатель, который по своей сути является коллекторным двигателем постоянного тока. В конкретном примере исполнения прототипа используется микродвигатель ИДР-6М, который удовлетворяет требованиям по потреблению электроэнергии. Однако все подобные двигатели имеют ограниченный ресурс, например ИДР-6М по паспорту - 500 часов, что никак не согласуется с требованием обеспечения непрерывной работы измерителя в течение одного года.
Ниже показано, что и другие импортные микродвигатели по совокупности параметров потребления и ресурса не подходят для решения поставленной задачи.
В основу изобретения поставлена задача создания электромагнитного измерителя скорости течения электропроводной жидкости с сохранением улучшенных метрологических и эксплуатационных характеристик, свойственных прототипу, совокупность существенных признаков которого обеспечивает достижение технического результата - увеличение длительности автономной работы при измерениях параметров поля скорости течений в морях и пресноводных бассейнах и увеличение ресурса работы измерителя: автономность должна составлять до одного года, ресурс - несколько годовых циклов работы.
Поставленная задача решается тем, что в электромагнитном измерителе течений, который содержит прочный цилиндрический немагнитный корпус удлиненной формы с заданным соотношением длины и диаметра (обеспечивающим оптимальный режим обтекания корпуса потоком жидкости), в котором установлен с возможностью вращения относительно его оси магнитный блок из по крайней мере двух пар постоянных магнитов с чередующейся полярностью, ориентированных так, что магнитное поле направлено вдоль оси вращения магнитного блока, и закрепленные на корпусе несколько пар электродов, рабочие поверхности которых расположены в исследуемой жидкости в зоне концентрации поля магнитного блока, при этом на каждом из магнитов на его полюсах закреплены наконечники из магнитомягкого материала, свободные концы которых расположены на заданном расстоянии от рабочих поверхностей электродов (в зависимости от предельной глубины погружения измерителя и, соответственно, от необходимой толщины стенки прочного корпуса), новым является то, что движение магнитного блока обеспечивается не самостоятельным устройством, как в прототипе - двигателем постоянного тока, который может быть выбран из числа известных, а специально созданной для решения поставленной задачи совокупностью конструктивных элементов (эта совокупность в дальнейшем для удобства именуется «привод»), которая включает в себя, в том числе, и вышеупомянутые конструктивные элементы самого измерителя.
А именно: для создания переменного магнитного поля совершенно необязательно непрерывно вращать магнитный блок, достаточно совершать возвратно-вращательные движения на угол, обеспечивающий смену направления магнитного поля при движении постоянных магнитов с чередующейся полярностью. При восьми магнитах необходимый угол составляет ±45 градусов.
Для обеспечения такого движения магнитного блока привод в заявленном устройстве, обеспечивающий механическое перемещение магнитов и чередование полярности магнитного потока в зоне электродов, содержит по крайней мере одну пару дополнительных постоянных магнитов. Каждая пара этих дополнительных магнитов установлена на заданном расстоянии от магнитного блока, исключающем их взаимодействие. Каждая пара этих дополнительных магнитов расположена перпендикулярно оси вращения магнитного блока. В каждой этой паре дополнительных магнитов один магнит установлен в корпусе неподвижно, а другой - на оси вращения магнитного блока. Привод содержит также катушку индуктивности, которая расположена на заданном расстоянии от магнитов магнитного блока (в зависимости от необходимых силы и дистанции взаимодействия магнитов и катушки). Ось катушки индуктивности параллельна оси вращения магнитного блока и лежит на окружности, которая образована вращением вокруг оси магнитного блока геометрических осей магнитов этого магнитного блока. Катушка индуктивности подключена к блоку электроники, генерирующему импульсы тока, питающего катушку и, тем самым, обеспечивающему возвратно-вращательное движение магнитного блока на заданный угол (±45 градусов) и с заданной частотой - в зависимости от области применения измерителя, т.е. от степени временной изменчивости исследуемого потока (исследования глубоководные или в поверхностном взволнованном слое моря и т.п.).
Подчеркнем, что в прототипе вращающиеся магниты магнитного блока служат только для создания переменного магнитного поля в приэлектродной области. В заявленном измерителе магниты магнитного блока (преимущественно их восемь) выполняют не только указанную функцию, но вместе с катушкой индуктивности и блоком электроники привода создают знакопеременный вращающий момент, обеспечивающий возвратно-вращательное движение магнитного блока.
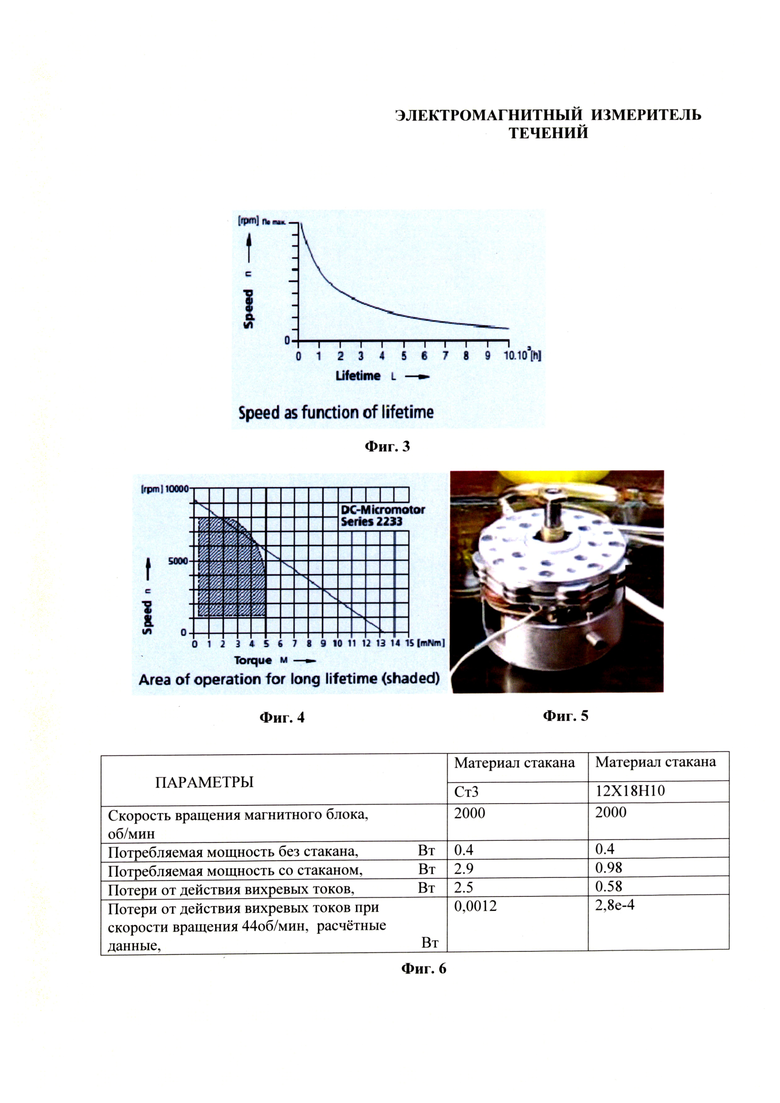
Сущность изобретения поясняется со ссылкой на иллюстрации, на которых изображено: фиг. 1 - продольный разрез секции корпуса измерителя с приводом; фиг. 2 - поперечный ступенчатый разрез Α-A привода с показом места крепления катушки индуктивности и двумя парами дополнительных магнитов; фиг. 3 - зависимость ресурса привода от скорости вращения; фиг. 4 - область оптимальных рабочих режимов привода; фиг. 5 - внешний вид привода; фиг. 6 - таблица с данными о потерях от вихревых токов.
ЭМИТ содержит (фиг. 1, 2) цилиндрический сборный корпус, который выполнен из прочного немагнитного материала и имеет несколько секций, соединенных прочно и герметично между собой, образуя удлиненную форму с заданным соотношением длины и диаметра. На фиг. 1, 2 приведена секция 1 корпуса, в которой установлен с возможностью вращения относительно оси корпуса магнитный блок, который выполнен в виде диска и содержит по крайней мере две пары постоянных магнитов 2, установленных с чередующей полярностью так, что магнитное поле направлено вдоль оси вращения магнитного блока. Преимущественно магнитный блок одержит четыре пары магнитов. В данном случае магниты 2 выполнены круглыми и плоскими. Магниты 2 установлены равномерно по окружности и на заданном расстоянии друг от друга, что исключает их взаимное ослабление. На каждом из магнитов 2 на его полюсах закреплены полюсные наконечники 3 из магнитомягкого материала в виде плоских накладок заданной толщины и диаметром, равным диаметру магнитов, создающие зону концентрации магнитного поля.
На внешней поверхности секции 1 закреплены несколько пар электродов 4, рабочие поверхности которых расположены в исследуемой жидкости в зоне концентрации поля магнитного блока. ЭМИТ преимущественно содержит две такие пары электродов, которые расположены в двух взаимно ортогональных осевых плоскостях секции 1. В данном случае электроды 4 имеют цилиндрическую форму и ориентированы вдоль корпуса измерителя. Рабочие поверхности электродов 4 расположены на заданном расстоянии от свободных концов полюсных наконечников 3 магнитов 2. Электроды 4 в данном случае закреплены герметично в проходных отверстиях металлического прочного корпуса секции 1 и изолированы от него. Для исключения шунтирования полезного сигнала, снимаемого с электродов, металлический прочный корпус секции 1 в зоне расположения электродов 4 имеет электроизоляционное покрытие (лакокрасочное или из диэлектрической пленки).
Рабочие поверхности электродов 4 расположены в зоне минимального искажения поля скорости течения в приэлектродной области, что позволяет правильно формировать диаграмму направленности системы пар электродов.
Магнитный блок установлен на валу 5 через пару шарикоподшипников 6, которые в гнезде магнитного блока закреплены крышкой 7, которая выполнена с длинной опорой. ЭМИТ содержит по крайней мере одну пару дополнительных постоянных магнитов 8 и 9. Преимущественно - содержит две такие пары, которые расположены диаметрально. Каждая пара дополнительных постоянных магнитов 8, 9 расположена на заданном расстоянии от магнитов 2 и установлена перпендикулярно оси вращения магнитного блока.
Один из магнитов каждой пары дополнительных постоянных магнитов - магнит 8 - закреплен на конце длинной опоры крышки 7, и эти магниты совершают синхронное движение с магнитным блоком.
Другой магнит каждой пары дополнительных постоянных магнитов - магнит 9 – неподвижен, и эти магниты установлены на немагнитном основании 10, расположенном в секции 1.
ЭМИТ содержит катушку индуктивности 11, которая установлена на заданном расстоянии от магнитов 2 магнитного блока и закреплена на основании 10 так, что ее ось параллельна оси вращения магнитного блока и лежит на окружности, образованной вращением вокруг оси магнитного блока геометрических осей магнитов 2 этого блока. Катушка индуктивности 11 подключена к блоку электроники привода (на чертеже не изображен), который генерирует импульсы тока, питающие катушку и, тем самым, обеспечивает возвратно-вращательное движение магнитного блока с заданной частотой на заданный угол.
Фактически привод представляет собой маятник с известной инерционной массой (массой магнитного блока) и действующей на нее упругой силой, создаваемой взаимным притяжением магнитов 8 и 9, и имеющий вполне определенную резонансную частоту.
Устройство ЭМИТ работает следующим образом. При включении питания блок электроники привода формирует в катушке индуктивности 11 импульсы тока определенной длительности, следующие с частотой, близкой к резонансной частоте маятника. В течение времени, определяемого добротностью резонансной системы маятника, амплитуда (угол) качания (возвратно-вращательного движения) увеличивается до некого установившегося значения. Как только магнитный блок начинает двигаться, блок электроники, формирующий в катушке индуктивности 11 импульсы тока, начинает синхронизироваться самим маятником, вследствие чего его движения происходят на резонансной частоте. В случае остановки возвратно-вращательного движения магнитного блока блок электроники привода опять начинает формировать в катушке индуктивности 11 импульсы тока, следующие с частотой, близкой к резонансной частоте маятника. С течением времени амплитуда (угол) качания (возвратно-вращательного движения) увеличивается до некого установившегося значения.
При прохождении мимо каждого из четырех электродов 4 области концентрированного (с помощью полюсных наконечников 3) магнитного поля различного направления на электродах 4 возникают потенциалы разного знака. Разность переменных по знаку потенциалов каждой пары электродов 4 поступает на входы элементов блока электроники измерителя (на чертеже не изображен) - дифференциального инструментального усилителя, а затем на полосовой фильтр и синхронный детектор. Синхронным детектором управляет датчик Холла (на чертеже не изображен), определяющий в каждый момент времени направление магнитного поля, а значит, и фазу переменного напряжения, поступающего после усиления и фильтрации на синхронный детектор.
Для исключения фазовых искажений фильтруемых сигналов скорость углового движения магнитного блока, а значит, и частота усиливаемого переменного напряжения должна быть стабильна, что и обеспечивается самим принципом работы привода - принципом маятника, имеющего стабильную частоту качания при стабильности его массы и упругой силы - силы притяжения магнитов 8 и 9.
Такой привод не имеет относительно недолговечных коллектора и щеток - необходимых атрибутов электродвигателя постоянного тока. Подвергающийся механическому износу единственный узел - шарикоподшипник, несущий магнитный блок, имеет несравненно больший ресурс, чем коллекторно-щеточный узел.
Для оценки достоинства заявленного изобретения с таким приводом приведем величины энергопотребления и моторесурса нескольких типов микромощных электродвигателей постоянного тока, которые на разных стадиях разработки были использованы в прототипе для обеспечения движения магнитного блока:
- микромощный коллекторный интегрирующий двигатель постоянного тока с редуктором ИДР-6М (отечественного производства) с потреблением менее 1 мА при напряжении 3.5 В и 22 об/мин на холостом ходу, что практически отвечает реальной нагрузке, создаваемой вращающейся системой магнитов на подшипниковых опорах в отсутствие значительных вихревых токов, возбуждаемых в металлических элементах корпуса датчика и окружающей среде и нагружающих двигатель;
- микромощный импортный коллекторный двигатель с редуктором - (FAULHABER MINIMOTOR SA, Precious Metal Commutation 1512U012SR 39:1) с потреблением около 4 мА при установленном напряжении 4.5 В и также обеспечивающий 22 об/мин на холостом ходу.
Сравнение характеристик обоих типов двигателей не выявило преимуществ какого-либо из них. ИДР-6М потребляет менее 3 мВт, но имеет ресурс 500 часов.
Требуемый ресурс для обеспечения работы в арктических условиях (от навигации до навигации) должен быть не менее: 365 сут × 24 ч = 8760 ч за одну постановку. Если измеритель должен отработать по крайней мере в течение 3-х постановок, то ресурс должен составлять 26280 часов.
Импортный двигатель 1512U012SR также коллекторный, поэтому не имеет большого ресурса при установленной скорости вращения, составляющей 30% от максимальной, что и подтверждается фиг. 3 и 4, взятыми из технического описания изготовителя этого двигателя. Кроме того, он потребляет 18 мВт - в шесть раз больше, чем ИДР-6М, и в два раза больше установленного лимита ~10 мВт, стоимость его составляет около 200$, а применение его никак не соответствует при серийном производстве программе импортозамещения.
Оценка энергетических затрат бесколлекторных двигателей, имеющих значительно больший ресурс по сравнению с коллекторными, показала, что они менее экономичны. Двигатель той же фирмы FAULHABER Micro Brushless DC-Motor Electronic Commutation 0,012 mNm потребляет при напряжении 1 В ток 32 мА или 32 мВт, хотя и обладает большим ресурсом, но в 4 раза менее экономичен, чем созданный заявителем.
Испытания, выполненные заявителем на созданном действующем макете привода, показанном на фиг.5, показали среднее потребление механизма 2.5 мА (при импульсном токе около 50 мА) и напряжении питания 3.3 В, т.е. 8.25 мВт. Следует учесть, что механизм действующего макета привода был изготовлен в макетных мастерских заявителя на станочном оборудовании класса H - нормальной точности, к которому относится большинство универсальных станков. Следует ожидать, что применяя высокоточное оборудование, используемое в приборостроении класса В - станки высокой точности, можно существенно снизить потери в подвижных узлах привода, а значит, и потребляемую мощность до величины, определенной ниже.
Что касается ресурса такого привода, то, учитывая очень низкую возвратно-вращательную скорость, около 90 град./с, эквивалентную 0.25 об/с или 15 об/мин, отсутствие коллекторно-щеточного узла и чрезвычайно малую нагрузку, время жизни такого привода будет определяться только применяемыми подшипниками и для выбранного класса составляет 40-60 тысяч часов.
Определим ожидаемое минимально возможное потребление электроэнергии разработанным приводом.
Колебание некой инерционной массы, снабженной упругим элементом - это фактически колебания системы, на собственной резонансной частоте, что обеспечивает необходимую стабильность частоты при стабильности массы и упругого элемента (по аналогии пружины маятника), роль которого выполняет сила притяжения магнитов 8 и 9. Потери энергии в такой механической системе определяются трением в подшипниках вала с магнитами (магнитного блока), действием вихревых токов, возбуждаемых в металлическом корпусе прибора и проводящей окружающей среде, а также потерями в упругом элементе, которые в конструкции данного привода отсутствуют.
Так как проводимость морской воды на несколько порядков меньше проводимости металла корпуса прибора, мы эту составляющую потерь не определяли. Оценить экспериментально потери на вихревые токи порядка единиц милливатт не представлялось возможным. Учитывая это, привод приводился в движение внешним достаточно мощным двигателем (единицы ватт) со скоростью (2000 об/мин), значительно превышающей рабочую. Для такой большой скорости, превышающей рабочую в 45 раз, достаточно просто было определить потери от действия вихревых токов. Одновременно были сделаны оценки величины потерь от вида металла прочного корпуса.
В ходе проверки потерь от действия вихревых токов они были оценены при напряжении питания внешнего двигателя 12 В и двух материалах металлического стакана, имитирующего прочный корпус 1: сталь Ст3 по ГОСТ 380-2005 и нержавеющая сталь марки 12Х18Н10 по ГОСТ 9940 - 81.
Получены результаты:
- при скорости вращения 2000 об/мин потребление при надетом стакане из стали Ст3 составляет 2.9 Вт, при снятом стакане - 0.4 Вт, следовательно, потери составляют 2.5 Вт;
- при скорости вращения 2000 об/мин потребление при надетом стакане из нержавеющей стали составляет 0.98 Вт, при снятом стакане - 0.4 Вт, следовательно, потери составляют 0.58 Вт.
Потери от действия вихревых токов при скорости вращения 44 об/мин согласно квадратичной зависимости потерь от частоты переменного магнитного поля (скорости вращения магнитного блока) на основании расчета составили 0,0012 Вт для корпуса из Ст3 и 2,8×10-4 Вт из стали 12Х18Н10 в соответствии с различием их удельной электрической проводимости. Данные о потерях отражены в таблице на фиг. 6.
Для того чтобы маятник мог совершать движения в установившемся режиме, потери должны быть скомпенсированы. Для разных материалов прочного корпуса эти потери разные, но не более 1.2 мВт. Вот такого порядка величины можно ожидать минимальное потребление разработанного привода.
В конкретном примере осуществления изобретения магнитный блок содержит четыре пары магнитов, что позволяет снизить скорость его движения (амплитуду качаний) и, следовательно, снизить потребление электроэнергии, что очень важно для решения поставленной задачи. В этом примере осуществления изобретения привод электромагнитного измерителя содержит две пары дополнительных магнитов, что обеспечивает требуемую упругую силу в заданном диапазоне качания ±45 градусов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный измеритель компонент вектора скорости течения электропроводной жидкости | 2012 |
|
RU2606340C2 |
| Измеритель объема жидкости | 2021 |
|
RU2767475C1 |
| СТАБИЛИЗИРОВАННЫЙ ГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2542711C1 |
| САМОПОДДЕРЖИВАЮЩАЯСЯ МАГНИТО-ГРАВИТАЦИОННАЯ СИСТЕМА "МОТОР-ГЕНЕРАТОР" С АВТОСТАБИЛИЗАЦИЕЙ РЕЖИМА РЕЗОНАНСА КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ МАГНИТА | 2018 |
|
RU2699021C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДЕТЕКТОР ОБЪЕКТА ТОЛКАЮЩЕГО И УДАРНОГО ТИПА | 2012 |
|
RU2558715C2 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2002 |
|
RU2219495C1 |
| Измеритель напряженности электростатического поля | 2016 |
|
RU2643701C1 |
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| Устройство для измерения угловой скорости | 1987 |
|
SU1569713A1 |

Изобретение относится к измерителям скорости и направления течений в морях и пресноводных водоемах на различных глубинах в составе автономных буйковых станций и других неподвижных (малоподвижных) носителей. Электромагнитный измеритель течений содержит немагнитный корпус, в котором установлен магнитный блок из двух пар постоянных магнитов с чередующейся полярностью, на полюсах магнитов закреплены наконечники из магнитомягкого материала, несколько пар электродов, закрепленных на корпусе, при этом содержит расположенную на заданном расстоянии от магнитов магнитного блока катушку индуктивности, ось которой параллельна оси вращения магнитного блока и лежит на окружности, образованной вращением вокруг оси магнитного блока геометрических осей его магнитов, и которая подключена к блоку электроники, обеспечивающему возвратно-вращательное движение магнитного блока с заданной частотой на заданный угол, измеритель содержит установленную на заданном расстоянии от магнитов магнитного блока по крайней мере одну пару дополнительных постоянных магнитов, при этом каждая пара расположена перпендикулярно оси вращения магнитного блока и один из магнитов каждой пары установлен в корпусе неподвижно, а другой - на оси вращения магнитного блока. Технический результат - увеличение длительности автономной работы и увеличение ресурса работы измерителя с сохранением улучшенных метрологических и эксплуатационных характеристик. 2 з.п. ф-лы, 6 ил.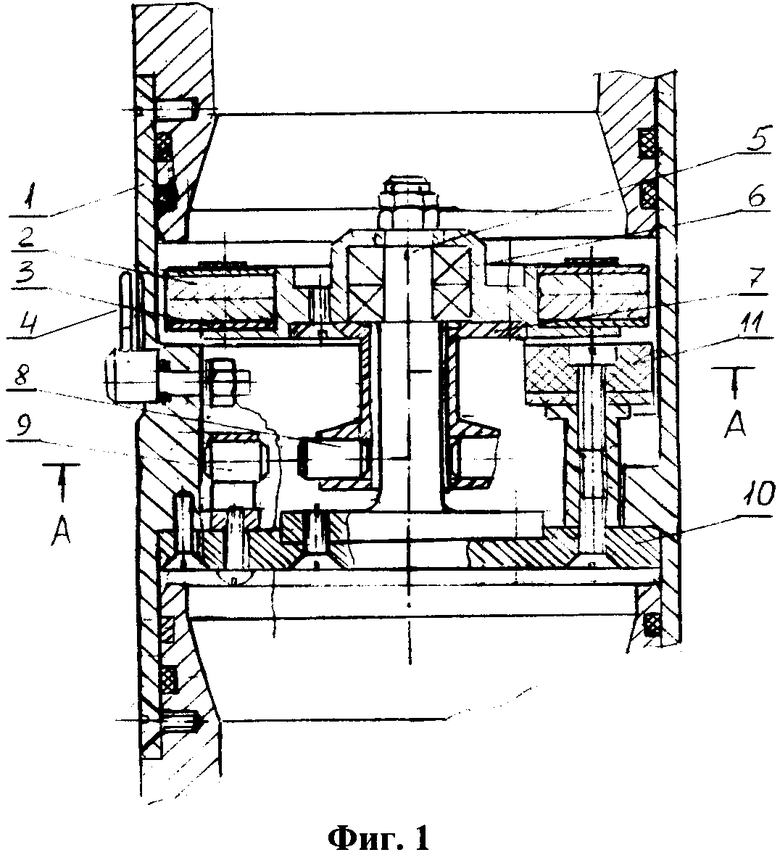
1. Электромагнитный измеритель течений, содержащий прочный цилиндрический немагнитный корпус удлиненной формы с заданным соотношением длины и диаметра, в котором установлен с возможностью вращения относительно его оси магнитный блок из по крайней мере двух пар постоянных магнитов с чередующейся полярностью, ориентированных так, что магнитное поле направлено вдоль оси вращения магнитного блока, и закрепленные на корпусе несколько пар электродов, рабочие поверхности которых расположены вне корпуса в зоне концентрации поля магнитного блока, при этом на каждом из магнитов на его полюсах закреплены наконечники из магнитомягкого материала, свободные концы которых расположены на заданном расстоянии от рабочих поверхностей электродов, отличающийся тем, что содержит расположенную на заданном расстоянии от магнитов магнитного блока катушку индуктивности, ось которой параллельна оси вращения магнитного блока и лежит на окружности, образованной вращением вокруг оси магнитного блока геометрических осей его магнитов, и которая подключена к блоку электроники, обеспечивающему возвратно-вращательное движение магнитного блока с заданной частотой на заданный угол, измеритель содержит установленную на заданном расстоянии от магнитов магнитного блока по крайней мере одну пару дополнительных постоянных магнитов, при этом каждая пара расположена перпендикулярно оси вращения магнитного блока и один из магнитов каждой пары установлен в корпусе неподвижно, а другой - на оси вращения магнитного блока.
2. Электромагнитный измеритель по п. 1, отличающийся тем, что магнитный блок содержит четыре пары магнитов.
3. Электромагнитный измеритель по п. 1 или 2, отличающийся тем, что содержит две пары дополнительных магнитов.
| US 6085599 A, 11.07.2000 | |||
| ИЗМЕРИТЕЛЬ СКОРОСТИ ТЕЧЕНИЯ | 1991 |
|
RU2050547C1 |
| Устройство для автоматического останова металлоткацкого станка | 1957 |
|
SU112770A1 |
| US 4434666 A, 06.03.1984. | |||

