ВВЕДЕНИЕ
Настоящее изобретение относится к устройству, выполненному с возможностью детектирования физической величины, например плотности текучей среды, например, газа, жидкости или смеси жидкость/газ.
УРОВЕНЬ ТЕХНИКИ
В международной патентной заявке No. PCT/NL 2007/050665 раскрыты инновационное устройство, содержащее канал текучей среды и расходомер, и способ измерения расхода текучей среды. Известный расходомер содержит вихреобразующий элемент, продолжающийся в канале, при этом вихреобразующий элемент выполнен с возможностью образования вихрей Кармана в текучей среде, движущейся по каналу во время работы. Вихреобразующий элемент снабжен волоконной брэгговской решеткой (FBG) датчика на основе волоконной брэгговской решетки. Во время работы частота вихрей Кармана, характеризующая вихри, образованные вихреобразующим элементом, может быть детектирована, используя сигнал от датчика на основе волоконной брэгговской решетки, относящегося к соответствующей волоконной брэгговской решетке данного вихреобразующего элемента. В дополнительном предпочтительном варианте осуществления известный расходомер выполнен с возможностью детектирования температуры, в частности, также посредством использования волоконной брэгговской решетки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с настоящим изобретением предоставлены устройство и способ, при применении которых одна или несколько величин, относящихся к текучей среде, могут быть точно детектированы посредством использования сравнительно недорогих, компактных и долговечных средств без датчика, требующего внешнего источника электропитания (или средств передачи электрического сигнала).
Для этого в соответствии с одним вариантом осуществления изобретения устройство охарактеризовано тем, что оно включает в себя:
- тело датчика, выполненное с возможностью простираться в движущуюся текучую среду (во время работы), при этом тело датчика содержит волоконную брэгговскую решетку датчика на основе волоконной брэгговской решетки, предназначенную для генерирования сигнала детектора, зависящего от колебания, по меньшей мере, части тела датчика; и
- блок обработки, выполненный с возможностью обработки сигнала детектора и определения физической величины на основе детектированного колебания при частоте собственных механических колебаний гибкой части тела датчика.
Более точно, изобретение может быть определено посредством признаков пункта 1 формулы изобретения.
Настоящее изобретение базируется на идее, заключающейся в том, что вышеупомянутый расходомер также может быть использован для измерения плотности движущейся текучей среды или другой величины, относящейся к текучей среде, такой как ее масса или удельный массовый расход. В частности, было установлено, что движущаяся текучая среда может вызвать собственные механические колебания части датчика на одной или нескольких соответствующих частотах собственных механических колебаний (см. фиг. 9 данной заявки на патент). Волоконная брэгговская решетка расходомера обеспечивает получение недорогого, точного и надежного средства для детектирования таких колебаний. Тело датчика предпочтительно содержит волоконную брэгговскую решетку, составляющую одно целое с ним.
Фиг. 9 представляет доказательство одновременного возникновения колебаний, вызванных вихрями Кармана, и собственных колебаний части тела датчика. Полагают, что механические колебания на частоте собственных колебаний возникают просто вследствие турбулентных пульсаций, присутствующих в потоке естественным образом, а не обязательно вследствие вихреобразования.
Как правило, во время работы блок обработки будет расположен отдельно от тела датчика. Одно или несколько оптических средств связи, например одно или несколько волокон, могут быть использованы для передачи сигнала (оптического) детектора между телом датчика и блоком обработки. Таким образом, получающееся в результате устройство очень хорошо приспособлено для использования в случаях применения в скважинах, поскольку компонент датчика не требует ни электрической энергии, ни передачи электрических сигналов (например, к возможному устройству обработки, расположенному на некотором расстоянии в подходящем месте).
В частности, блок обработки выполнен с возможностью детектирования упомянутой частоты собственных механических колебаний (используя упомянутый сигнал детектора). Следует отметить, что детектирование конкретной частоты из сигнала датчика как такового, например пика частоты (который связан с частотой собственных колебаний) в спектре сигнала, представляет собой общеизвестные сведения для специалиста в области обработки сигналов датчиков.
Детектирование упомянутой частоты собственных механических колебаний может быть обеспечено разными способами. Блок обработки может быть выполнен с возможностью обработки сигнала детектора для получения частотного спектра сигнала. Общеизвестно, что это может быть осуществлено посредством выполнения спектрального анализа сигнала времени, полученного от детектора. Это может включать спектральный анализ Фурье, но не ограничено им. Получающийся в результате спектр будет содержать пик частоты, который соответствует частоте собственных колебаний. На основную частоту, при которой имеет место данный пик, влияет плотность окружающей текучей среды, которая вызывает сдвиг данной частоты от базового значения, которое имело бы место в вакууме (исходная частота собственных колебаний). Общеизвестно, что данная основная частота может быть получена из экспериментов или теории. Зная данную основную частоту, можно определить плотность окружающей среды посредством измерения частоты, при которой имеет место смещенный пик.
Из этого следует, что в дополнительном варианте осуществления нижеприведенная формула используется блоком обработки для определения упомянутой физической величины, относящейся к текучей среде:
f=f0(1+CK·rho)-1/2,
где f - детектированная (основная) частота (Гц) собственных колебаний части тела датчика в текучей среде, f0 - начальная частота (Гц) собственных колебаний данной части в вакууме, rho - плотность текучей среды (кг/м3) и CK - постоянная (м3/кг), связанная с размерами и массой данной части.
Наиболее предпочтительно то, что настоящее изобретение объединено с функциональной возможностью измерения расхода. Было установлено, что одно и то же устройство может быть использовано для одновременного детектирования расхода текучей среды, в частности, посредством детектирования частоты вихреобразования, и плотности (или массы) текучей среды посредством детектирования одной или нескольких частот собственных механических колебаний (при этом частота собственных колебаний или частоты собственных колебаний являются отдельными от частоты вихреобразования во время работы).
В частности, как следует из фиг. 9 (см. ниже), колебания, которые связаны с упомянутой частотой собственных колебаний, происходят при более высоком значении частоты по сравнению со значением частоты вихреобразования и, следовательно, могут быть детектированы простым образом посредством блока обработки.
В предпочтительном варианте осуществления тело датчика представляет собой вихреобразующий элемент, который выполнен с возможностью образования вихрей Кармана в текучей среде во время работы. В этом случае очень компактная конфигурация может быть получена, когда частота вихрей Кармана, создаваемых вихреобразующим элементом, может быть детектирована, используя сигнал датчика на основе волоконной брэгговской решетки, при этом сигнал относится к соответственной встроенной волоконно-оптической решетке вихреобразующего элемента. Кроме того, тело датчика предпочтительно может иметь гибкую часть, которая содержит образующую одно целое с ней, по меньшей мере, частично изогнутую часть волокна, простирающуюся, по меньшей мере, частично вдоль криволинейной траектории и содержащую волоконную брэгговскую решетку. В этом случае первый участок части волокна может быть расположен на некотором расстоянии от жесткой части тела датчика (удерживающей гибкую часть), например, по существу в ортогональном направлении относительно пути потока текучей среды. Второй участок части волокна может быть расположен рядом с жесткой частью, при этом он будет простираться, например, по существу параллельно по отношению к пути потока текучей среды. Второй участок части волокна может содержать волоконную брэгговскую решетку для детектирования колебаний с собственной частотой.
Кроме того, предоставлен способ детектирования физической величины движущейся текучей среды, например плотности текучей среды, например, посредством использования устройства в соответствии с изобретением, в котором текучая среда вызывает колебание гибкой части тела датчика с частотой собственных колебаний, детектирования частоты собственных колебаний и обработки детектированной частоты собственных колебаний для измерения физической величины. Например, но необязательно, колебание с частотой собственных колебаний, вызванное потоком текучей среды, может являться механическим колебанием с собственной частотой колебаний первой моды.
Например, в способе согласно изобретению текучая среда вызывает колебание гибкой части тела датчика с (относительно низкой) первой частотой, при этом детектируют частоту собственных колебаний данной (колеблющейся) части, при этом частота собственных колебаний - это частота, отдельная от первой частоты, при этом детектированную частоту собственных колебаний подвергают обработке для определения физической величины.
Например, было установлено, что применение относительно тонкой (пластинчатой) упругой части датчика может обеспечить низкочастотные колебания собственной моды этой части одновременно с, но отдельно от первой частоты (вихрей Кармана) этой части.
Дополнительные предпочтительные варианты осуществления изобретения описаны в зависимых пунктах формулы изобретения. Эти и другие аспекты изобретения будут очевидны из неограничивающих вариантов осуществления и будут разъяснены со ссылкой на неограничивающие варианты осуществления, описанные в дальнейшем и показанные на чертежах.
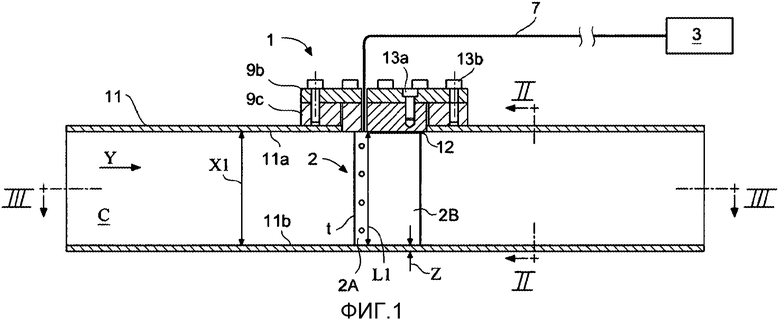
Фиг. 1 показывает продольное сечение одного варианта осуществления изобретения;
фиг. 2 показывает сечение по линии II-II на фиг. 1;
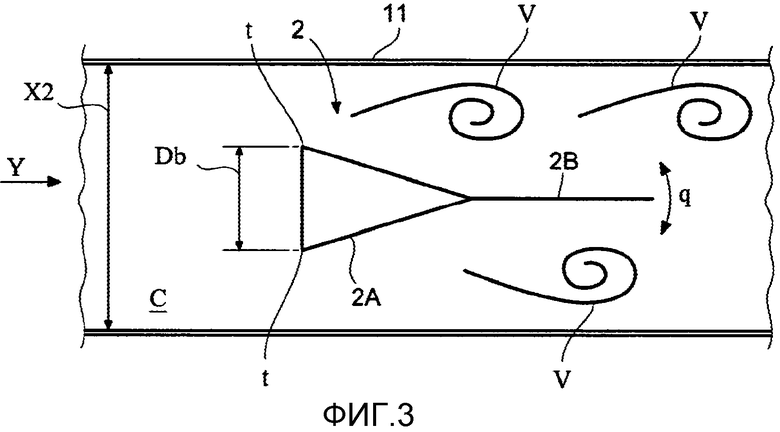
фиг. 3 показывает продольное схематичное сечение по линии III-III на фиг. 1;
фиг. 4 представляет собой вид в перспективе вихреобразующего элемента варианта осуществления по фиг. 1;
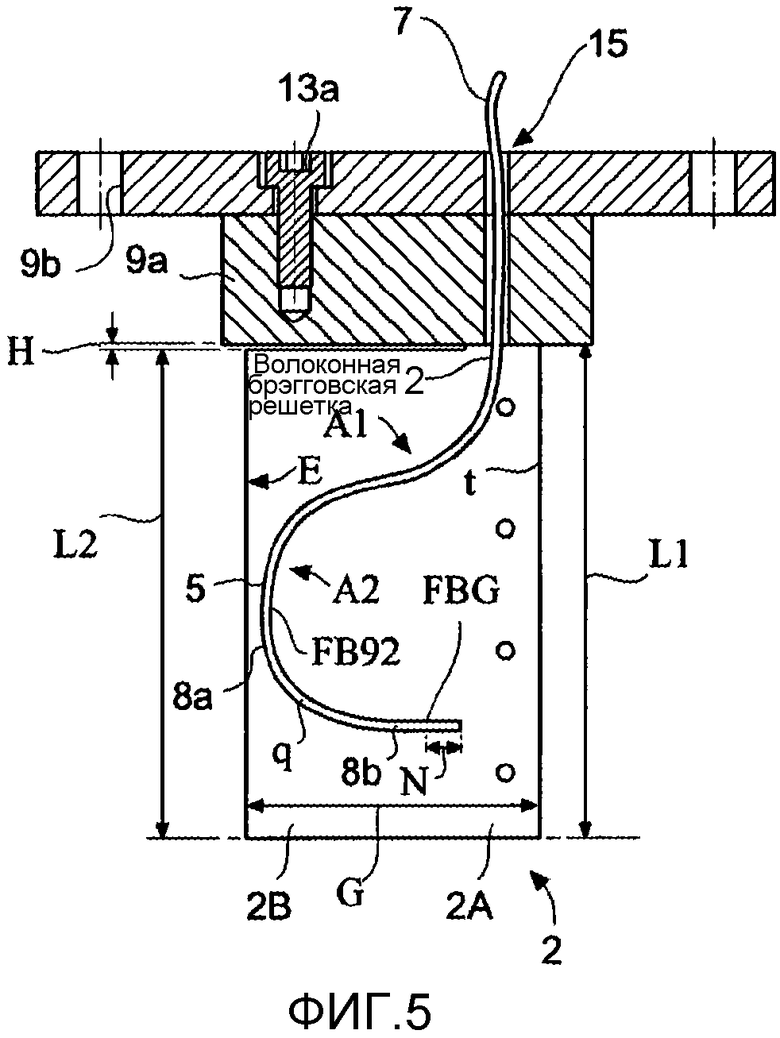
фиг. 5 представляет собой продольное сечение вихреобразующего элемента, показанного на фиг. 4;
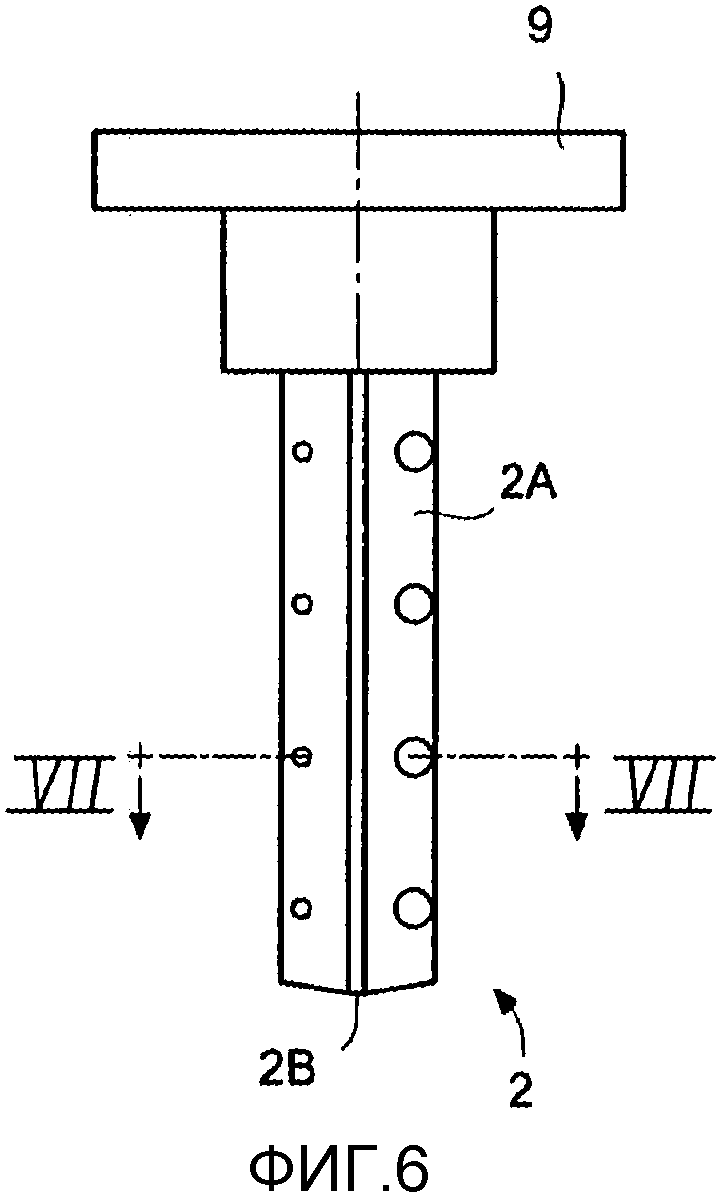
фиг. 6 представляет собой вид спереди вихреобразующего элемента по фиг. 4;
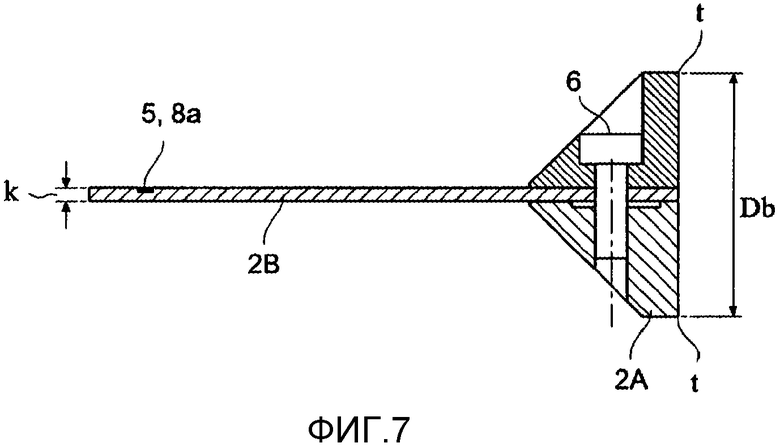
фиг. 7 представляет собой сечение по линии VII-VII на фиг. 6;
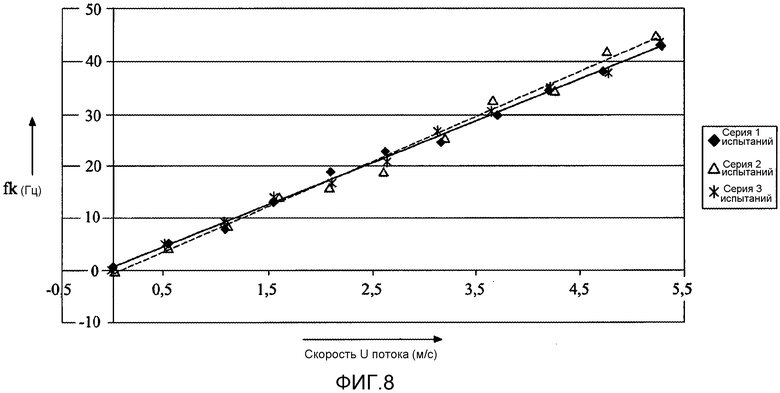
фиг. 8 показывает график зависимости измеренной частоты вихреобразования от скорости потока в примере; и
фиг. 9 показывает график результата измерений, включая детектированное собственное колебание первой моды части варианта осуществления по фиг. 1-7.
Аналогичные или соответствующие элементы обозначены аналогичными или соответствующими ссылочными позициями в настоящей заявке.
Фиг. 1-7 показывают неограничивающий вариант осуществления узла, содержащего канал С для текучей среды и расходомер 1.
Канал С для текучей среды (например, магистраль для текучей среды, труба, трубопровод) может быть выполнен с возможностью пропускания текучей среды, например газа, газовой смеси, жидкости, жидкой смеси, воды, пара. В конкретном варианте осуществления канал С может быть предназначен для нагнетания текучей среды в нефтяное или газовое месторождение, однако специалисту будет понятно, что канал С может быть использован во многих других применениях. В данном варианте осуществления канал С имеет по существу круглое поперечное сечение, имеющее диаметр (ширину) W. Канал также может иметь другие конфигурации, например, имеющие прямоугольное или квадратное поперечное сечение или другое поперечное сечение, как будет понятно специалисту.
Расходомер 1 выполнен с возможностью измерения расхода текучей среды, движущейся по каналу С во время работы. Для этого расходомер 1 содержит, по меньшей мере, один вихреобразующий элемент 2 (только один показан на данных чертежах), продолжающийся в канале С. В дополнительном варианте осуществления узел имеет множество разнесенных вихреобразующих элементов 2 для детектирования расходов в разных местах в канале С. В этом случае профили расходов могут быть детектированы посредством расходомера 1, например, для определения или оценки количеств текучей среды, которые нагнетаются в определенных частях (слоях) нефтяного или газового месторождения.
Как будет описано ниже, было установлено, что расходомер 1 предпочтительно также может быть использован для детектирования физической величины, например плотности, движущейся текучей среды, проходящей по каналу С. Для этого детектируют частоты (fn) собственных механических колебаний части вихреобразующего элемента.
Каждый вихреобразующий элемент 2 выполнен с возможностью образования вихрей V Кармана в текучей среде, проходящей по каналу С во время работы (см. фиг. 3). Направление потока текучей среды показано на фиг. 3 стрелкой Y. В частности, каждый вихреобразующий элемент 2 содержит плохо обтекаемое тело 2, имеющее два края t для отрыва вихрей, предпочтительно представляющие собой по существу параллельные острые боковые края. Плохо обтекаемое тело 2 может быть расположено так, что данные края t будут расположены выше по потоку по отношению к остальной части плохо обтекаемого тела (как на фиг. 3) или в альтернативном варианте ниже по потоку (например, в том случае, когда направление потока, показанное на фиг. 3, будет изменено на противоположное). В данном варианте осуществления плохо обтекаемое тело 2 жестко прикреплено к стенке 11 канала.
В частности, в основе работы расходомера 1 лежит принцип образования вихрей в зоне препятствия (плохо обтекаемого тела 2), размещенного в движущейся текучей среде (см. фиг. 3). Граничный слой может нарастать с обеих сторон плохо обтекаемого тела 2 вследствие вязкости и может отделяться в точках отрыва, образуемых краями t. Во время работы вихри V могут отделяться попеременно с обеих сторон тела 2 с частотой fK вихреобразования. Как известно из предшествующего уровня техники, частота fK вихреобразования пропорциональна скорости U потока в соответствии со следующим уравнением 1:
fK=St(U/Db) (1),
где St - безразмерное число Струхаля, U - скорость потока (м/с) и Db - диаметр/ширина (м) плохо обтекаемого тела. Как широко известно, число St Струхаля является характеристическим для определенной формы плохо обтекаемого тел и является постоянным в относительно большом диапазоне чисел Рейнольдса, так что зависимость между скоростью потока (м/с) и частотой вихреобразования является линейной в большом диапазоне значений расхода/скорости потока. Например, данный вариант осуществления может быть использован в том случае, когда скорости потока находятся в диапазоне от 0,5 до 5 м/с (при изменении значений 1:10), и, например, может иметь рабочие температуры в интервале от 20 до 350 градусов Цельсия при различных рабочих давлениях. Расходомер 1 также может быть выполнен с возможностью использования за пределами этих диапазонов скоростей и температур, как будет понятно специалисту. Граничный слой можно регулировать посредством выбора тела 2 вихреобразующего элемента, на котором точки отрыва определены точно посредством образования острых краев t на теле 2.
Плохо обтекаемое тело 2 может быть изготовлено из различных материалов. Плохо обтекаемое тело 2 может быть изготовлено, например, из жесткого коррозионно-стойкого материала, в частности соответствующего металла, сплава, стали или жесткого пластика, армированного пластика, например нержавеющей стали или алюминия (нержавеющая сталь предпочтительна для скважинных применений по соображениям, связанным с долговечностью) и/или других пригодных материалов.
Фиг. 4-7 показывают предпочтительный вариант осуществления конфигурации плохо обтекаемого тела/вихреобразующего элемента более подробно. Для получения линейной зависимости между скоростью потока и вихреобразованием вихреобразующий элемент 2 по данному варианту осуществления обеспечивает четко определенные линии (края) t отрыва и имеет по существу Т-образное сечение. Для этого вихреобразующий элемент 2 был снабжен, в частности, первой частью 2А (то есть верхней частью Т Т-образной формы) и второй частью 2В (то есть центральной линией Т Т-образной формы), при этом первая часть имеет два края t отрыва, а вторая часть представляет собой элемент 2В для разделения текучей среды.
Как первая, так и вторая части 2А, 2В вихреобразующего элемента могут иметь различные конфигурации. Первая и вторая части 2А, 2В вихреобразующего элемента предпочтительно выполнены из одного и того же материала, однако это не является обязательным.
Первая часть 2А вихреобразующего элемента предпочтительно является жесткой, предпочтительно по существу сплошной частью 2А, которая жестко прикреплена (то есть по существу неподвижна во время работы) к стенке 11 канала С. Первая часть 2А вихреобразующего элемента имеет переднюю поверхность, простирающуюся по существу в поперечном направлении относительно продольного направления канала (то есть направления Y потока текучей среды, проходящей по каналу С во время использования), при этом боковые стороны передней поверхности представляют собой линии t отрыва вихрей на вихреобразующем элементе 2.
В настоящем варианте осуществления длина L1 первой части 2А вихреобразующего тела по существу или почти равна диаметру/ширине Х1 проточного канала (см. фиг. 1), так что стенки канала С служат в качестве концевых пластин для краев t для отрыва потока (то есть противоположные концы каждого края t для отрыва потока расположены на соответственных частях стенки или близко к соответственным частям стенки 11 канала). Таким образом, первая часть 2А плохо обтекаемого тела 2 простирается от первой части 11а внутренней стенки канала С до противоположного второй части 11b внутренней стенки канала С, как на фиг. 1-2, и предпочтительно по центру канала С. В данном случае, например, между концом плохо обтекаемого тела 2 и стенкой канала, тем не менее, может простираться узкая щель, например, щель Н, имеющая ширину, составляющую около 1 мм или менее, как было показано на фиг. 5.
В другом варианте осуществления ширина каждой щели Н может быть больше 1 мм, например больше 1 см.
Например, в конфигурации для длительного использования первая часть 2А вихреобразующего тела может быть прочно прикреплена на одном конце (или в альтернативном варианте на обоих концах) к части стенки (или к участкам стенок) канала, например, посредством зажима, адгезива, сварки, соответствующих соединений, болтового соединения с возможностью отсоединения, посредством комбинации данных способов и/или другим способом. В данном варианте осуществления один конец первой части 2А вихреобразующего элемента прикреплен к монтажной конструкции 9, которая была прочно присоединена к первой части стенки канала. Например, монтажная конструкция может включать в себя первую монтажную деталь 9а, предназначенную для удерживания плохо обтекаемого тела 2, вторую монтажную деталь 9b, которая прикреплена к первой детали 9а посредством трех первых болтов 13а, расположенных на определенном расстоянии друг от друга с образованием треугольной конфигурации, и третью монтажную деталь 9с, которая соединяет монтажную вторую деталь 9b со стенкой 11 канала. Кроме того, стенка 11 канала может иметь отверстие 12 для ввода плохо обтекаемого тела 2, удерживаемого посредством первой монтажной детали 9а, в канал С. Монтажная конструкция 9 может быть выполнена с возможностью создания герметичного по отношению к текучей среде закрытия отверстия 12 после монтажа.
В другом варианте осуществления длина L1 соответствующей части 2А плохо обтекаемого тела может быть значительно меньше диаметра/ширины Х1 проточного канала. Если требуется, плохо обтекаемое тело 2 может содержать одну или несколько концевых пластин, простирающихся в поперечном направлении относительно краев t для отрыва вихрей и предназначенных для регулирования граничного слоя на плохо обтекаемом теле 2.
В дополнительном варианте осуществления (см. фиг. 3) расстояние Db между двумя краями (линиями) t для отрыва вихрей, измеренное в поперечном направлении относительно продольного направления канала, больше одной десятой части ширины Х2 канала С для текучей среды, измеренной в том же направлении, например составляет около одной четвертой ширины канала С для текучей среды, при этом упомянутое расстояние Db между двумя краями t для отрыва вихрей предпочтительно меньше половины ширины Х2 канала С. Поскольку в данном варианте осуществления канал С имеет круглое поперечное сечение, упомянутая последней ширина Х2 канала равна вышеупомянутой ширине канала, которая показана на фиг.1 стрелкой Х1.
Продольное сечение первой части 2А вихреобразующего элемента предпочтительно является по существу треугольным (как на фиг. 3, 7), или имеет форму усеченного треугольника, или может иметь другую форму.
Вторая часть 2В вихреобразующего элемента предпочтительно имеет панелеобразную, полосообразную или листообразную конфигурацию, при этом она имеет по существу прямоугольную форму (такую, как в данном варианте осуществления). Например, вторая часть 2В вихреобразующего элемента может быть выполнена с такими размерами в трех ортогональных направлениях, что размер в одном ортогональном направлении (толщина k) будет значительно меньше (например, по меньшей мере, в 50 раз), чем каждый из размеров во втором и третьем ортогональных направлениях (длина L2 и ширина G).
Кроме того, вторая часть 2В вихреобразующего элемента предпочтительно простирается по существу в продольном направлении канала и имеет две поверхности, воспринимающие давление текучей среды и обращенные в сторону друг от друга, которые выполнены с возможностью попеременного восприятия вызываемых вихрями изменений давления во время работы (см. фиг.3), и при этом данные изменения давления вызывают деформирование данных поверхностей. В частности, в настоящем варианте осуществления изменения давления вызывают колебание и/или деформирование второй части 2В вихреобразующего элемента в направлении, которое перпендикулярно направлению Y потока (другими словами: вызываемые вихрями деформация и/или колебания части 2В вихреобразующего элемента будут происходить главным образом в поперечных направлениях данной части 2В и показаны двойной стрелкой q на фиг. 3, то есть колебание и/или деформация происходят в направлении, которое по существу перпендикулярно принимающим давление поверхностям данной части 2В вихреобразующего элемента), при этом данные деформация и/или колебания приводят к поверхностной деформации во второй части 2В вихреобразующего элемента.
В данном варианте осуществления вторая часть 2В вихреобразующего элемента простирается по центру относительно первой части 2А вихреобразующего элемента, перпендикулярно по отношению к поверхности плохо обтекаемого тела, имеющей два края t для отрыва, и предпочтительно по центру канала С после установки. Например, наружные контуры плохо обтекаемого тела, включающего в себя первую и вторую части 2А, 2В, могут быть по существу зеркально симметричными относительно продольной центральной зеркальной плоскости симметрии, как в данном варианте осуществления.
В данном варианте осуществления одна поперечная сторона (нижняя сторона данной части на фиг. 5) второй части 2В вихреобразующего элемента простирается вровень с соответственной стороной первой части 2А вихреобразующего элемента (см. фиг. 5). Однако другая поперечная сторона второй части 2В вихреобразующего элемента расположена на расстоянии от монтажной конструкции 9 (см. фиг. 5), при этом расстояние между ними показано стрелкой Н на фиг. 5.
Вторая часть 2В вихреобразующего элемента представляет собой часть 2В, воспринимающую изменения давления, или деформирующуюся часть, которая выполнена с возможностью восприятия изменений давления, вызванных вихрями, во время работы. В частности, вихри Кармана могут вызвать колебания напряжений во второй части 2В вихреобразующего элемента (что показано стрелкой q на фиг. 3) и, более точно, на участках ее поверхности (то есть вызываемые вихрями изменения давления во время работы приводят к поверхностной деформации во второй части 2В вихреобразующего элемента). Например, вторая часть 2В вихреобразующего элемента может быть в незначительной степени, упругодеформируемой во время работы, так что данная часть 2В вихреобразующего элемента выполняет малые колебания q во время работы вследствие восприятия изменений давления, обусловленных вихрями, при этом малые колебания q приводят к изменяющемуся деформированию двух боковых (воспринимающих давление) поверхностей второй части 2В вихреобразующего элемента. Было установлено, что данные изменения деформаций являются относительно большими в особенности в зоне, которая примыкает к первой части 2А вихреобразующего элемента (то есть в зоне соединения с первой частью 2А вихреобразующего элемента).
В дополнительном варианте осуществления вторая часть 2В вихреобразующего элемента 2 имеет две поперечные стороны, которые расположены на определенном расстоянии от противоположных частей, ограничивающих продольный поток (к которым относится часть стенки канала для одной поперечной стороны вихреобразующего элемента и часть монтажной конструкции для другой поперечной стороны вихреобразующего элемента в данном варианте осуществления). Например, на фиг. 1 расстояние Z между (на чертеже) нижней поперечной стороной прямоугольной части 2В вихреобразующего элемента и стенкой 11 канала предпочтительно находится в пределах от около 0,1 до 10 мм, в частности составляет около 1-2 мм, и ширина Н щели между (на фиг. 1) верхней поперечной стороной прямоугольной части 2В вихреобразующего элемента и поверхностью первой монтажной детали 9а также предпочтительно находится в пределах от около 0,1 до 10 мм, в частности составляет около 1-2 мм.
В другом варианте осуществления ширина щели Н между верхней поперечной стороной прямоугольной части 2В вихреобразующего элемента и поверхностью первой монтажной детали 9а может быть больше 10 мм.
Следовательно, поперечные стороны второй части 2В вихреобразующего элемента не контактируют с противоположными ограничивающими поток поверхностями, так что вызываемые вихрями изменения давления могут привести к изменениям поверхностной деформаций во второй части 2В вихреобразующего элемента и/или к колебаниям второй части 2В вихреобразующего элемента. В частности, вызываемые вихрями изменения, давления могут вызвать колебание и/или деформацию вихреобразующего элемента, при этом колебания и/или деформация вихреобразующего элемента могут вызвать поверхностную деформацию.
В соответствии с одним вариантом осуществления длина L2 второй части 2В вихреобразующего элемента (измеренная в направлении, параллельном по отношению к линиям t отрыва) может быть немного меньше длины L1 первой части 2А вихреобразующего элемента, при этом разность длин находится, например, в пределах от около 0,1 до 20 мм, в частности в пределах от около 1 до 2 мм (см. фиг. 5).
Длина L2 второй части 2В вихреобразующего элемента может быть больше ширины G наружного участка (хвостового участка) данной части 2В, при этом ширину G измеряют в продольном направлении канала (см. фиг. 5; в данном случае ширина G второй части 2В вихреобразующего элемента представляет собой ширину того участка данной части, который простирается снаружи от первой части вихреобразующего элемента и служит в качестве части вихреобразующего элемента, воспринимающей изменения давления текучей среды). Например, длина L2 второй части 2В может находиться в интервале значений, около в 1,5-2 раза превышающих упомянутую ширину G данной части 2В. Было установлено, что хорошие результаты могут быть получены в том случае, когда длина L2 находится в интервале значений, в 1,7-1,9 раза превышающих ширину G, в частности длина L2 равна ширине G, умноженной на 1,8.
В другом варианте осуществления длина L2 второй части 2В вихреобразующего элемента может быть такой же, как ширина G, или может быть меньше ширины G наружного участка (хвостового участка) данной части 2В, при этом ширину G измеряют в продольном направлении канала. В данном случае длина L2 второй части 2В может находиться, например, в интервале значений, составляющих около 0,5-1 от упомянутой ширины G данной части 2В.
Кроме того, было установлено, что хорошие результаты могут быть получены в том случае, когда толщина k второй части 2В вихреобразующего элемента (измеренная в ее поперечном направлении) меньше около 10 мм, предпочтительно меньше около 5 мм (см. фиг. 7).
Первая и вторая части 2А, 2В вихреобразующего элемента могут быть присоединены друг к другу разными способами. Например, первая и вторая части вихреобразующего элемента могут быть выполнены как одно целое. Кроме того, первая и вторая части 2А, 2В вихреобразующего элемента могут быть соединены друг с другом посредством адгезива, сварки, болтового соединения (посредством болтов 6, как в варианте осуществления по фиг. 1-7), зажима, фиксации за счет силового замыкания, фиксации за счет геометрического замыкания, комбинации данных способов и/или другим способом. В данном варианте осуществления вторая часть 2В вихреобразующего элемента содержит внутренний участок, который продолжается в первой части 2А вихреобразующего элемента для удерживания в ней, и вышеописанный наружный участок (имеющий упомянутую ширину G), который продолжается снаружи первой части 2А вихреобразующего элемента для восприятия изменений давления, вызываемых вихрями. Предпочтительно, как следует из чертежа, упомянутый наружный (хвостовой) участок второй части 2В вихреобразующего элемента является по существу сплошным, образуя по существу сплошные (непрерывные) поверхности, воспринимающие давление.
Первая и вторая части 2А, 2В вихреобразующего элемента предпочтительно выполнены так, что относительно изменений давления, вызываемых вихрями, могут вызвать относительно большие изменения деформации в определенной зоне вихреобразующего элемента (например, наружном участке второй части 2В вихреобразующего элемента, которая примыкает к первой части 2А вихреобразующего элемента).
Кроме того, каждый вихреобразующий элемент 2 снабжен первой волоконной брэгговской решеткой FBG датчика 3, 7, FBG на основе волоконной брэгговской решетки. Во время работы частота fK вихрей Кармана, характеризующая вихри V, образованные вихреобразующим элементом 2, может быть детектирована посредством использования сигнала датчика на основе волоконной брэгговской решетки, при этом данный сигнал генерируется соответствующей первой волоконной брэгговской решеткой FBG данного вихреобразующего элемента 2. Первая волоконная брэгговская решетка FBG предпочтительно прикреплена к той части вихреобразующего элемента 2, которая подвергается сравнительно большим изменениям поверхностной деформации вследствие колебаний/деформации, вызываемых изменениями давления, которые обусловлены вихрями, во время работы, и выполнена с возможностью детектирования этих изменений деформации.
Кроме того, в дополнительном варианте осуществления волоконная брэгговская решетка FBG соответствующего вихреобразующего элемента 2 выполнена с возможностью восприятия упомянутых изменений давления, в частности через вызываемые изменениями давления изменения деформации части 2В вихреобразующего элемента 2, воспринимающей изменения давления, и с возможностью изменения соответственного сигнала датчика на основе волоконной брэгговской решетки в результате восприятия изменений давления. Волоконная брэгговская решетка FBG предпочтительно смонтирована близко к принимающей давление поверхности второй части 2В вихреобразующего элемента или простирается на указанной принимающей давление поверхности, примыкает к указанной принимающей давление поверхности или встроена в указанную воспринимающую давление поверхность для обеспечения ее чувствительности к упомянутой поверхностной деформации, которая вызвана деформацией/колебаниями данной части 2В вихреобразующего элемента во время работы.
Первая волоконная брэгговская решетка FBG предпочтительно расположена на расстоянии от поверхности отрыва вихрей (при этом поверхность имеет две линии t отрыва вихрей) соответственного вихреобразующего элемента 2. Кроме того, место расположения первой волоконной брэгговской решетки FBG предпочтительно находится на расстоянии от двух поперечных сторон второй части 2В вихреобразующего элемента.
Кроме того (как следует из фиг. 5), продольное направление первой волоконной брэгговской решетки FBG предпочтительно образует угол, составляющий менее 90°, относительно направления потока текучей среды во время работы, например угол, составляющий менее 30°, и предпочтительно угол, составляющий менее 5°. В данном варианте осуществления угол между продольным направлением первой волоконной брэгговской решетки FBG и направлением Y потока текучей среды составляет около 0°.
В частности, принимающая изменения давления часть/вторая часть 2В вихреобразующего элемента содержит составляющую одно целое с ней, изогнутую часть 8 волокна, простирающуюся, по меньшей мере, частично вдоль криволинейной траектории и содержащую первую волоконную брэгговскую решетку FBG (см. фиг. 4-5). Первый участок 8а изогнутой части 8 волокна предпочтительно простирается на короткое расстояние от свободного края Е вихреобразующего элемента, который обращен в сторону от вихреобразующей поверхности вихреобразующего элемента 2, по существу в ортогональном направлении относительно продольного направления канала (см. фиг. 5). Второй участок 8b части 8 волокна предпочтительно расположен рядом с вихреобразующей поверхностью вихреобразующего элемента 2 и простирается по существу параллельно продольному направлению канала. В данном варианте осуществления данный второй участок 8b волокна содержит первую волоконную брэгговскую решетку FBG. В частности, криволинейная траектория волоконной части, будучи образованной на/в вихреобразующем элементе 2, имеет первый изгиб А1 для направления волокна от места входа у первой части 2А вихреобразующего элемента по направлению к свободному краю Е вихреобразующего элемента и следующий второй изгиб А2 (имеющий направление изгиба, которое противоположно направлению изгиба, характеризующему первый изгиб) для направления волокна от свободного края Е вихреобразующего элемента назад к первой части 2А вихреобразующего элемента к месту расположения брэгговской решетки, которое находится на расстоянии от места входа.
В дополнительном варианте осуществления (непоказанном) волокно может быть изогнуто дополнительно (например, для образования по существу полной петли вдоль вихреобразующего элемента 2 и/или проходящей через вихреобразующий элемент 2) и может быть направлено в обратном направлении к стенке 11 канала и через удерживающую конструкцию 9, например, для направления его к другому вихреобразующему элементу 2 для образования другой первой волоконной брэгговской решетки FBG в/на данном другом вихреобразующем элементе 2. В этом случае место (точка) входа волокна может также обеспечивать место выхода волокна.
В частности, в данном варианте осуществления монтажная конструкция 9 имеет сквозное отверстие 15 (см. фиг. 5) для прохода волокна 7 из зоны вне канала С к вихреобразующему элементу 2. Первая часть 2А вихреобразующего элемента может иметь аналогичное отверстие для приема части волокна 7. Вторая часть 2В вихреобразующего элемента может иметь криволинейную канавку 5 или отверстие для удерживания изогнутой части 8 волокна, содержащей первую волоконную брэгговскую решетку FBG. В дополнительном варианте осуществления сквозное отверстие 15 также может быть использовано для направления волокна 7 от вихреобразующего элемента 2 снова из канала через стенку 11 канала к другому месту, например к другому вихреобразующему элементу (непоказанному).
Например, предназначенная для приема волокна канавка 5 вихреобразующего элемента 2 может иметь глубину, которая меньше толщины k второй части 2В вихреобразующего элемента, например глубину, которая меньше 1 мм, например составляет около 0,4 мм. Например, глубина канавки 5 для приема волокна может быть меньше половины толщины k второй части 2В вихреобразующего элемента для размещения решетки FBG рядом с боковой поверхностью данной части 2В и/или в боковой поверхности данной части 2В. Изогнутая часть 8 волокна предпочтительно в основном встроена в соответственную часть 2В вихреобразующего элемента. Часть 8 оптического волокна, имеющая брэгговскую решетку FBG, может быть прикреплена к соответствующей канавке 5, используя соответствующий адгезив, например термоотверждающуюся смолу, эпоксидную смолу или адгезив другого типа. Канавка 5 для приема волокна предпочтительно выполнена с возможностью удерживания соответственной части волокна по существу плотно. В неограничивающем варианте осуществления ширина канавки 5 может составлять около 1 мм.
Аналогичным образом, узел может иметь модульную конфигурацию, при этом узел может включать в себя множество вихреобразующих элементов 2, причем каждый вихреобразующий элемент 2 предпочтительно снабжен упомянутой первой волоконной брэгговской решеткой FBG датчика на основе волоконной брэгговской решетки. В этом случае одиночное волокно 7 может быть просто снабжено всеми из первых волоконных брэгговских решеток FBG различных вихреобразующих элементов 2, при этом волокно 7 может простираться от одного вихреобразующего элемента до другого для передачи сигналов датчиков.
Работа датчика на основе волоконной брэгговской решетки как такового известна специалисту. В одном варианте осуществления каждая волоконная брэгговская решетка FBG выполнена с возможностью по существу отражения одной конкретной длины волны оптического сигнала, передаваемого к решетке FBG посредством волокна 7, и по существу передачи всех других длин волн. В данном случае длина волны отраженного света зависит от изменения показателя преломления в решетке FBG. Длина отраженной волны названа брэгговской длиной λb волны и задается как:
λb=2 neffΛ (2),
где neff - эффективный показатель преломления оптической моды, распространяющейся в волокне 7, и Λ - период решетки. Деформация, температура и давление могут вызывать изменение свойств волокна и, таким образом, длины λb отраженной волны. Например, амплитуда сигнала датчика представляет собой меру степени деформирования, которому подвергается решетка FBG во время работы. В частности, в данном варианте осуществления длина отраженной волны используется в качестве меры скорости потока, при этом изменения этой длины волны (то есть изменения амплитуды отраженного сигнала датчика) детектируют, что может быть обеспечено сравнительно простым образом, для определения вышеупомянутой частоты fK вихрей Кармана.
Например, волокно 7 может представлять собой стандартное оптическое волокно с одной или несколькими брэгговскими решетками FBG, имеющее минимальный радиус изгиба, составляющий около от 2 до 3 см и длину N решетки (см. фиг. 5) для каждой брэгговской решетки FBG, составляющую около 2 см. Как будет понятно специалисту, волокно 7 также может иметь меньший радиус изгиба и/или более мелкую решетку. Например, длина N первой волоконной брэгговской решетки предпочтительно может составлять около 1 см.
В настоящем варианте осуществления первая решетка FBG, в частности, используется для детектирования изменяющейся деформации в вихреобразующем элементе 2/ изменяющейся деформации вихреобразующего элемента 2, при этом возникающее в результате этого изменение соответственного сигнала датчика может быть обработано для определения скорости U потока текучей среды. Предпочтительное местоположение для первой решетки FBG - это место в начале хвостовой части 2В вихреобразующего элемента 2, непосредственно за (имеющей форму усеченного треугольника) первой частью 2А вихреобразующего элемента (см. фиг. 5, 7), поскольку было установлено, что во время работы изменения деформации, вызываемые вихрями Кармана, будут наибольшими на этом участке хвостовой части 2В вихреобразующего элемента.
Вся первая решетка FBG предпочтительно может подвергаться по существу равномерному деформированию во время работы, что обеспечивается посредством размещения решетки FBG по существу параллельно продольному направлению канала. Однако в настоящем варианте осуществления на практике деформация не обязательно должна быть постоянной на всем волокне для получения точных результатов измерений. Это обусловлено тем, что частота (то есть изменение амплитуды, а не амплитуда как таковая) представляет собой измеряемый параметр, так что отклонения амплитуды детектированного отраженного сигнала не влияют на результаты измерений характеристик потока. Это отличается от устройства, показанного в документе JP200387451, в случае которого сигнал амплитуды датчика, отраженного сигнала, может иметь сравнительно большую погрешность вследствие неравномерного деформирования решетки.
Узел по настоящему изобретению может включать в себя соответствующую систему 3 датчиков (например, содержащую один или несколько соответствующих процессоров и/или анализаторов), например, промышленно изготавливаемую и поставляемую на рынок систему от компании Deminsys Commercial, при этом система датчиков оптически соединена с оптическим волокном 7. Система 3 датчиков (то есть «блок обработки») может быть выполнена с возможностью генерирования и передачи оптического сигнала в волокно 7, при этом сигнал имеет длину волны (то есть вышеупомянутую брэгговскую длину волны), подлежащую, по меньшей мере, частичному отражению первой волоконной брэгговской решеткой FBG в том случае, когда решетка подвергается заданной степени деформирования, например никакому деформированию. В том случае, когда узел включает в себя различные волоконные решетки FBG, имеющие разные брэгговские длины λb волн, оптический сигнал может быть подвергнут мультиплексированию с разными частями сигнала, имеющими эти разные брэгговские длины λb волн, так что разные решетки FBG могут быть использованы независимо друг от друга и одновременно системой 3 датчиков.
Кроме того, система 3 датчиков (блок обработки) может быть выполнена с возможностью детектирования оптического сигнала, который отражается каждой первой волоконной брэгговской решеткой FBG вихреобразующего(их) элемента(ов) 2, и обработки детектированного(ых) оптического(ких) сигнала(ов), например, для определения расхода текучей среды исходя из изменений детектированного(ых) сигнала(ов).
Ниже будет разъяснено дополнительное предпочтительное применение системы 3 датчиков (или «блока обработки»), связанное с детектированием физической величины, относящейся к текучей среде, например плотности текучей среды. Для этого система 3 датчиков предпочтительно выполнена с возможностью детектирования основных собственных (механических) колебаний части 2В вихреобразующего элемента 2 посредством использования упомянутого оптического сигнала (обработка включает в себя обработку детектированного оптического сигнала для детектирования частоты изменений детектированного сигнала, при этом изменения представляют собой результат изменяющейся деформации, которой подвергается решетка FBG, для определения величины мгновенной частоты собственных колебаний части 2В вихреобразующего элемента).
Во время работы варианта осуществления по фиг. 1-7 поток текучей среды будет вызывать вихреобразование на вихреобразующем элементе 2, что будет вызывать изменения давления на хвостовую часть 2В плохо обтекаемого тела 2. Изменения давления будут вызывать колебания хвостовой части, что будет приводить к изменяющейся поверхностной деформации хвостовой части 2В и, следовательно, к изменениям деформации встроенной первой волоконной брэгговской решетки FBG (которая предпочтительно смонтирована на соответственной поверхности второй части 2В вихреобразующего элемента или рядом с соответственной поверхностью второй части 2В вихреобразующего элемента для измерения данной поверхностной деформации). Поверхностная деформация будет измерена как результат данных колебаний. Это может быть обеспечено просто посредством системы 3 датчиков, передающей оптический сигнал, имеющий брэгговскую длину волны первой волоконной брэгговской решетки FBG вихреобразующего элемента 2, в волокно 7 и детектирующей соответственный оптический сигнал, который отражается первой волоконной брэгговской решеткой FBG. Детектированный оптический сигнал затем обрабатывают для детектирования частоты изменений детектированного сигнала (при этом изменения представляют собой результат изменяющейся деформации, которой подвергается решетка FBG) для определения расхода текучей среды исходя из данных изменений посредством использования вышеприведенного уравнения 1. Как будет разъяснено ниже, в предпочтительном варианте осуществления детектированный оптический сигнал обрабатывают системой 3 датчиков для детектирования частоты изменений детектированного сигнала (при этом изменения представляют собой результат изменяющейся деформации, которой подвергается решетка FBG) для определения физической величины, относящейся к текучей среде.
Таким образом, один датчик на основе волоконной брэгговской решетки используется для детектирования расхода в определенном месте в канале С для текучей среды, при этом, например, не требуется выполнения никакой сложной взаимной корреляции разных сигналов датчика на основе решетки.
Фиг. 8 показывает график зависимости измеренной частоты fK вихреобразования в зависимости от скорости потока, построенный на основе экспериментов, выполненных с данным вариантом осуществления. В данном эксперименте скорость Uflow потока текучей среды, проходящего по каналу С, была задана равной 11 разным заранее определенным значениям (от 0 м/с до 5,5 м/с с шагом 0,25 м/с), и полученный в результате сигнал датчика на основе волоконной брэгговской решетки был обработан для детектирования частоты вихрей Кармана. Как следует из фиг. 8, три разные серии испытаний дали все одинаковый линейный график зависимости детектированной частоты fK от скорости Uflow потока. Надежные данные могут быть получены для низких скоростей потока (0,5 м/с в представленном примере), а также для высоких скоростей потока (5,5 м/с в представленном примере).
Из вышеизложенного следует, что в соответствии с настоящей заявкой предложен вихревой расходомер 1, в котором в одном варианте осуществления деформация, возникающая в результате вихреобразования, может быть измерена посредством использования датчика на основе волоконной брэгговской решетки FBG. Данный датчик может использовать сравнительно небольшой участок стандартного оптического волокна 7, так что отсутствует необходимость в использовании каких-либо скважинных электронных устройств, поскольку сигнал датчика может быть подан прямо на поверхность. Компоненты расходомера, которые расположены в потоке текучей среды (например, плохо обтекаемое тело 2), в частности, не включают в себя никаких элементов с электрическим приводом, никаких электрических датчиков и никакой электропроводки. Только оптическое средство связи, в данном случае (одиночное) оптическое волокно 7, предпочтительно проходит к и через часть(и) датчика, расположенную(е) в текучей среде. В дополнительном варианте осуществления дистальный(ые) участок(ки) части(ей) датчика экранирован/экранированы от внутреннего пространства канала С для текучей среды (например, за счет встраивания во вторую часть 2В вихреобразующего элемента).
Преимущества волоконно-оптического расходомера заключаются в том, что расходомер является по существу искробезопасным и невосприимчивым к электромагнитным помехам. Плохо обтекаемое тело 2 может быть по существу Т-образным и содержать часть 2А с формой усеченного треугольника и длинную хвостовую часть 2В, присоединенную к ней. Хвостовая часть 2В данного тела предпочтительно выполнена как можно более тонкой для увеличения ее деформации и, следовательно, напряжения, измеряемого датчиком. Расходомер 1 может детектировать однофазные потоки (жидкости или газа), например воды, пара или других текучих сред.
Было установлено, что данный вариант осуществления может обеспечить оптимальную конструкцию плохо обтекаемого тела с точки зрения линейности измерений и качества сигнала, при этом FBG может обеспечить сигнал датчика с детектируемой информацией деформационных колебаний по сравнительно большим диапазонам скорости потока. Таким образом, датчик может обеспечить точные измерения расхода и очень чувствителен к изменениям расхода.
Кроме того, например, по существу Т-образное тело, такое как в данном варианте осуществления, представляет собой оптимальную конфигурацию плохо обтекаемого тела для генерирования деформации. Отклонение прямоугольной пластинчатой части плохо обтекаемого тела 2В может быть сравнительно большим. Кроме того, Т-образное тело также представляет собой единственную форму, которая может быть использована для соединения ряда расходомеров с одним волокном. Кроме того, было установлено, что данная форма может обеспечить очень хорошее отношение «сигнал - шум» у сигнала датчика во время работы.
В дополнительном варианте осуществления часть волокна, которая была соединена с вихреобразующим элементом 2, может содержать другие волоконные брэгговские решетки, например, для детектирования температуры. В одном варианте осуществления вихреобразующий элемент 2 может быть предусмотрен со второй волоконной брэгговской решеткой FBG2 системы 3, 7 с датчиками на основе волоконной брэгговской решетки, при этом вторая волоконная брэгговская решетка FBG2 выполнена с возможностью изменения соответственного сигнала датчика на основе волоконной брэгговской решетки в результате восприятия колебаний температуры. Для этого продольное направление второй волоконной брэгговской решетки FBG2 предпочтительно по существу перпендикулярно по отношению к продольному направлению канала.
Например, дополнительная - вторая - решетка FBG2 может быть расположена в том месте вихреобразующего элемента, на которое не оказывают значительного воздействия вихри V Кармана. На фиг. 5 два возможных места для размещения решетки для определения температуры показаны стрелками FBG2. Например, вторая волоконная решетка FBG2 может быть предусмотрена на упомянутом первом участке 8а изогнутой части 8 волокна или рядом с точкой входа (и, возможно, также выхода) рядом со стенкой 11 канала.
В альтернативном варианте узел может быть снабжен другим оптическим волокном, которое не включает в себя упомянутую первую решетку FBG, но включает в себя вторую решетку и обеспечивает удерживание второй решетки в потоке текучей среды для детектирования температуры текучей среды.
Кроме того, в соответствии с дополнительным вариантом осуществления настоящее изобретение может быть использовано при определении массового расхода, например, в соответствии с идеями публикации “A study of mass flow rate measurement based on the vortex shedding principle”, авторы H. Zhang et al., Flow Measurement and Instrumentation, 17(1), 2006, с использованием результатов измерений датчика давления (не показанного в настоящей заявке), расположенного выше по потоку относительно вихреобразующего элемента 2 (и расположенного на расстоянии от вихреобразующего элемента 2).
В соответствии с предпочтительным вариантом осуществления настоящее изобретение предоставляет устройство, выполненное с возможностью измерения физической величины, например плотности, движущейся текучей среды. В предпочтительном варианте осуществления устройство снабжено расходомером 1, который был описан выше и который был показан на фиг. 1-7, или аналогичным расходомером.
Как показано на чертежах, устройство включает в себя тело 2 датчика, которое выполнено с возможностью простираться в движущуюся текучую среду (проходящую по каналу С во время работы). Таким образом, в представленном примере тело 2 датчика предпочтительно содержит жесткую часть 2А, предназначенную для присоединения тела датчика к стенке 11 канала для текучей среды. В частности, вторая часть 2В тела 2 детектора представляет собой гибкий (пластинчатый), упругий элемент 2В, несущий волоконные брэгговские решетки FBG, FBG2. Гибкий упругий элемент 2В присоединен к жесткой части 2А, и оптическое волокно, которое включает в себя волоконную брэгговскую решетку FBG, проходит через жесткую часть 2А к гибкой части 2В. Как следует из чертежа, гибкий элемент 2В продолжается параллельно пути потока текучей среды (во время работы). В представленном примере гибкая часть 2В представляет собой упругий элемент, продолжающийся от жесткой опорной части 2А.
Тело 2 детектора также содержит составляющую одно целое с ним (первую) волоконную брэгговскую решетку FBG датчика 3, 7, FBG на основе волоконной брэгговской решетки для генерирования сигнала детектора, относящегося к колебанию, по меньшей мере, части 2В тела 2 датчика. Устройство включает в себя блок 3 обработки, который - в представленном примере - предпочтительно выполнен с возможностью обработки сигнала детектора и определения физической величины на основе детектированного колебания на частоте собственных механических колебаний (то есть частоте собственных колебаний) гибкой второй части 2В тела 2 датчика. Другими словами: блок 3 обработки предпочтительно выполнен с возможностью детектирования упомянутой частоты собственных механических колебаний, предпочтительно (но необязательно) в реальном времени (в частности, посредством использования сигнала детектора). Пример частотного спектра сигнала детектора показан на фиг. 9; метод получения такого частотного спектра является общеизвестным (например, посредством использования преобразования Фурье).
В настоящем примере собственная частота, подлежащая детектированию, представляет собой частоту собственных колебаний, которые происходят главным образом в поперечных направлениях второй части 2В вихреобразующего элемента, то есть в том же направлении, в котором происходят колебания в результате воздействий вихря (перпендикулярном направлению потока текучей среды, как показано двойной стрелкой q на фиг. 3). Как упомянуто ранее, подобные колебания приводят к поверхностной деформации во второй части 2В вихреобразующего элемента, которую детектируют, используя первую волоконную брэгговскую решетку FBG.
Частота собственных колебаний гибкого упругого элемента (соединенного с жесткой опорой) представляет собой частоту, при которой элемент колеблется сам по себе после отпускания его из положения, которое «отклоняется» от исходного положения, характеризующегося отсутствием колебаний. Как правило, каждый объект имеет одну или несколько частот собственных колебаний (при этом частота первой моды имеет самое низкое значение в Гц). Как следует из нижеприведенных уравнений, частота собственных колебаний зависит от плотности текучей среды (в случае ее наличия), которая контактирует с элементом.
В представленном неограничивающем примере частота собственных колебаний гибкой, упругой части 2В тела 2 датчика определяется выражением:
f=f0(1+CK·rho)-1/2 (3),
где f - (основная) частота (Гц) собственных колебаний гибкой части 2В в текучей среде, f0 - начальная частота (Гц) собственных колебаний пластинчатой части 2В в вакууме, rho - плотность текучей среды (кг/м3) и CK - постоянная (м3/кг), связанная с размерами и массой гибкой части 2В.
Начальная частота f0 собственных колебаний определяется выражением (см. “Flow-Induced Vibrations - An Engineering Guide”, Naudascher and Rockwell, Dover Publications, NY2005):
I2B=(L2·k3)/12 (4b),
где С - постоянная, G и L2 - вышеупомянутые ширина и длина (м) части 2В, Е - модуль Юнга (Па) части 2В, I2B - момент инерции второго порядка, µ - масса на единицу длины (кг/м) части 2В.
Из этого следует, что частота собственных колебаний изменяется при изменении плотности текучей среды (эффект «присоединенной массы»). Упругая часть 2В вихреобразующего элемента вызывает ускорение части окружающей среды при ее колебаниях. Это фактически вызывает увеличение массы части 2В, что приводит к уменьшению ее частоты собственных колебаний.
В данном варианте осуществления вышеупомянутая частота собственных колебаний представляет собой частоту собственных колебаний гибкого, упругого элемента 2В. В дополнительном варианте осуществления частота собственных колебаний колеблющейся части 2В тела датчика (подлежащая детектированию) может иметь величину, которая составляет менее 10000 Гц, в частности составляет менее 2000 Гц, например составляет менее 1000, в частности менее 500 Гц, или находится в пределах от 500 до 1000 Гц. Например, частота собственных колебаний, подлежащая детектированию, может представлять собой частоту собственных колебаний первой моды или частоту собственных колебаний более высокой моды (например, частоту собственных колебаний второй моды или третьей моды). Указанная частота собственных колебаний предпочтительно больше вышеупомянутой частоты fK вихреобразования.
Кроме того, в предпочтительном варианте осуществления для уменьшения момента инерции второго порядка толщина k второй части 2В вихреобразующего элемента может быть меньше 4 мм, например меньше 2 мм, например может составлять около 1 мм или менее и, например, может быть больше 0,1 мм. В качестве примера толщина k может находиться в пределах от около 1 до 2 мм или в пределах от около 0,1 до 1 мм.
В частности, блок 3 обработки выполнен с возможностью детектирования отклонения собственного колебания (частоты собственных колебаний) гибкой второй части 2В тела 2 датчика (контактирующей с движущейся текучей средой во время работы) относительно начальной частоты собственных колебаний части 2В. Начальная частота собственных колебаний может представлять собой заданную начальную частоту собственных колебаний, при этом начальная частота собственных колебаний представляет собой, например, заранее определенную частоту f0 собственных колебаний упругой части 2В тела датчика в вакууме (или в текучей среде). В одном примере блок 3 обработки может быть снабжен запоминающим устройством (может иметь запоминающее устройство или может быть соединен с запоминающим устройством), выполненным с возможностью хранения начальной частоты собственных колебаний гибкой части 2В.
В другом варианте осуществления устройство может быть выполнено с возможностью детектирования изменения плотности текучей среды (или другой физической величины текучей среды) посредством детектирования сдвига (мгновенной) частоты собственных колебаний второй части 2В вихреобразующего элемента. Например, устройство может быть использовано для измерения изменений плотности (без определения плотности как таковой). В том случае, когда должно быть детектировано только изменение величины, относящейся к текучей среде, (такой как плотность), в действительности не требуется знать любую заданную частоту собственных колебаний (такую как частота собственных колебаний в вакууме) упругой части 2В датчика; в этом случае во время работы необходимо будет осуществлять только мониторинг отклонений частоты собственных колебаний (см. вышеприведенное уравнение 3).
Как правило, устройство включает в себя возбудитель колебаний или соединено с возбудителем колебаний, выполненным с возможностью возбуждения колебаний гибкой части 2В тела 2 датчика посредством использования движущейся текучей среды. В представленных примерах возбудитель колебаний как таковой функционирует без использования внешнего источника электрической энергии (в любом случае никакая электрическая энергия не подается в тело 2 датчика и рядом с телом 2 датчика). Кроме того, в настоящих вариантах осуществления возбудитель колебаний не выполнен с возможностью обеспечения резонанса гибкой части 2В тела 2 датчика (то есть во время работы гибкая часть 2В не будет введена в резонанс посредством специального резонатора). Напротив, в представленных примерах именно поток текучей среды воздействует на гибкую часть 2В, в данном случае посредством вихрей, тем самым вызывая возникновение собственного механического колебания с частотой собственных колебаний части 2В.
В представленном примере во время работы частота fK вихрей Кармана, характеризующая вихри V, создаваемые вихреобразующим элементом 2, может быть детектирована, используя сигнал датчика на основе волоконной брэгговской решетки, при этом данный сигнал относится к соответственной встроенной первой волоконной оптической решетке FBG вихреобразующего элемента 2. Кроме того, предпочтительно, если частота fK вихрей Кармана меньше частоты собственных колебаний (в частности, частоты собственных колебаний первой моды) второй части 2В вихреобразующего элемента.
Функционирование настоящего примера позволяет реализовать способ измерения физической величины, в данном случае плотности, движущейся текучей среды. При использовании текучая среда вызывает колебания гибкой части 2В тела 2 датчика на ее частоте собственных колебаний. Детектируется, по меньшей мере, одна частота собственных колебаний (следовательно, по меньшей мере, значение). Детектированная частота собственных колебаний подвергается обработке (посредством блока 3 обработки) для определения (измерения) плотности текучей среды.
В частности, вихри V приводят к колебаниям гибкой части 2В на частоте вихреобразования, которая меньше частоты собственных колебаний; частоту вихреобразования предпочтительно также детектируют посредством блока обработки (посредством использования той же брэгговской решетки FBG), так что расход текучей среды может быть определен помимо плотности текучей среды.
ПРИМЕР
Устройство, подобное показанному на фиг. 1-7, было использовано для детектирования плотности текучей среды, в данном случае воздуха (при температуре 20°С), движущегося по каналу С со скоростью потока, составляющей 3,0 м/с. Устройство было снабжено относительно тонкой упругой пластинчатой частью 2В вихреобразующего элемента, изготовленной из нержавеющей стали. Были использованы нижеуказанные параметры: ширина гибкой пластины G=36 мм; длина пластины L=80 мм; толщина пластины k=0,5 мм и плотность материала пластины = 7700 кг/м3.
Фиг. 9 показывает результат, который представляет собой частотный спектр оптического сигнала (принимаемого блоком 3 обработки), включая пик детектированной частоты fn собственных колебаний (на около 300 Гц в данном примере) второй части 2В вихреобразующего элемента в сочетании с детектированной частотой fK вихреобразования. Два пика частоты разделены в достаточной степени (по меньшей мере, на 100 Гц) и, следовательно, могут быть точно и надежно обработаны (посредством блока обработки) для определения как плотности текучей среды, так и расхода текучей среды. Было установлено, что изменение плотности текучей среды приводит к изменению детектированной частоты fn собственных колебаний в соответствии с вышеприведенной формулой (3). Таким образом, указанная формула (3) может быть использована блоком обработки для определения плотности текучей среды посредством использования детектированной основной частоты собственных колебаний (и заданной начальной частоты f0).
Были проведены другие испытания для варианта осуществления изобретения с использованием природного газа под давлением от 10 до 40 бар, где первая мода частоты собственных колебаний пластинчатой части 2В вихреобразующего элемента возбуждалась при скоростях газа, составляющих свыше 2 м/с; было установлено, что частота собственных колебаний непосредственно зависела от плотности газа.
Несмотря на то что иллюстративные варианты осуществления настоящего изобретения были описаны более подробно со ссылкой на сопроводительные чертежи, следует понимать, что изобретение не ограничено данными вариантами осуществления. Различные изменения или модификации могут быть выполнены специалистом в данной области техники без отклонения от объема или сущности изобретения в том виде, как оно определено в формуле изобретения.
Следует понимать, что в настоящей заявке термин «содержащий» не исключает других элементов или этапов. Кроме того, каждый из терминов в единственном числе не исключает множества. Любую(ые) ссылочную(ые) позицию(и) в формуле изобретения не следует рассматривать как ограничивающую/ограничивающие объем притязаний формулы изобретения.
Вихреобразующий элемент/плохо обтекаемое тело 2 может быть выполнен/выполнено с разными размерами и может иметь различные формы. Например, первая часть вихреобразующего элемента может иметь сечение с формой, по существу представляющей собой форму треугольника, форму усеченного треугольника или другое сечение.
Кроме того, например, только один конец или, если желательно, противоположные концы первой части 2А плохо обтекаемого тела 2 могут быть прикреплены к стенке 11 канала.
Кроме того, возбудитель колебаний может быть конфигурирован по-разному. Например, в одном варианте осуществления гибкая (упругая) часть тела датчика может быть снабжена конструкцией замедления текучей среды, например рельефом, ребрами, усиливающими сопротивление, или другими средствами, вызывающими колебания, выполненными с возможностью возбуждения колебаний (включая колебание с частотой собственных колебаний) данной части посредством использования силы сопротивления текучей среды (текучей среды, проходящей вдоль упругой части датчика). Кроме того, для осуществления механических колебаний с частотой собственных колебаний части датчика вихреобразование предпочтительно, но не является необходимым. Как было упомянуто выше, полагают, что механическое колебание с частотой собственных колебаний возбуждается за счет турбулентных колебаний, существующих естественным образом в потоке, а не обязательно посредством вихреобразования.


В изобретении раскрыто устройство, выполненное с возможностью детектирования физической величины, например плотности, движущейся текучей среды, при этом устройство включает в себя: тело (2) датчика, выполненное с возможностью простираться в движущуюся текучую среду, при этом тело датчика содержит волоконную брэгговскую решетку (FBG) датчика (3, 7, FBG) на основе волоконной брэгговской решетки для генерирования сигнала детектора, относящегося к колебанию, по меньшей мере, части (2В) тела (2) датчика; и блок обработки, выполненный с возможностью обработки сигнала детектора и определения физической величины на основе детектированного колебания на частоте собственных механических колебаний гибкой части (2В) тела (2) датчика. 4 н. и 31 з.п. ф-лы, 9 ил.
1. Устройство для детектирования физической величины движущейся текучей среды, при этом устройство включает в себя:
- тело (2) датчика, выполненное с возможностью простираться в движущуюся текучую среду, при этом тело датчика содержит волоконную брэгговскую решетку (FBG) датчика (3, 7, FBG) на основе волоконной брэгговской решетки для генерирования сигнала детектора, относящегося к возбужденному текучей средой колебанию, по меньшей мере, гибкой части (2В) тела (2) датчика; и
- блок (3) обработки сигналов детектора;
при этом упомянутая часть (2В) тела датчика имеет частоту собственных механических колебаний, которая определяется выражением:
f=fо (1+К rhо)-1/2,
где f - частота собственных колебаний гибкой части (2В) в текучей среде (Гц), fо - начальная частота собственных колебаний гибкой части (2В) в вакууме (Гц), rhо - плотность текучей среды (кг/м3) и К - постоянная (м3/кг), связанная с размерами и массой гибкой части (2В),
при этом блок обработки выполнен с возможностью детектирования частоты f собственных механических колебаний гибкой части (2В) тела (2) датчика, используя сигнал детектора, и определения физической величины на основе детектированной частоты f собственных механических колебаний.
2. Устройство по п. 1, в котором тело датчика имеет гибкий элемент (2В), который несет волоконную брэгговскую решетку (FBG), при этом частота f собственных колебаний представляет собой частоту собственных колебаний гибкого элемента (2В).
3. Устройство по п. 2, в котором гибкий элемент (2В) простирается параллельно пути потока текучей среды.
4. Устройство по любому из предшествующих пунктов, в котором блок обработки выполнен с возможностью детектирования отклонения основной частоты f собственных колебаний гибкой части (2В) тела (2) датчика от начальной частоты fо собственных колебаний данной части (2В).
5. Устройство по любому из пп. 1-3, в котором блок обработки имеет запоминающее устройство или связан с запоминающим устройством, выполненным с возможностью хранения начальной частоты fо собственных колебаний.
6. Устройство по любому из пп. 1-3, в котором частота собственных колебаний гибкой части (2В) тела датчика меньше 10000 Гц, предпочтительно меньше 2000 Гц.
7. Устройство по любому из пп. 1-3, в котором тело (2) датчика имеет жесткую часть (2А) для присоединения тела датчика к стенке канала для текучей среды, гибкий элемент (2В), который включает в себя волоконную брэгговскую решетку (FBG), соединен с жесткой частью (2А), и оптическое волокно, которое включает в себя волоконную брэгговскую решетку (FBG), проходит через жесткую часть (2А) к гибкой части (2В).
8. Устройство по любому из пп. 1-3, включающее в себя возбудитель колебаний или связанное с возбудителем колебаний, выполненным с возможностью возбуждения колебания гибкой части (2В) тела (2) датчика, используя движущуюся текучую среду.
9. Устройство по любому из пп. 1-3, в котором тело датчика представляет собой вихреобразующий элемент (2), который выполнен с возможностью образования вихрей (V) Кармана в текучей среде во время работы.
10. Устройство по п. 9, в котором частота (fк) вихрей Кармана, характеризующая вихри (V), создаваемые вихреобразующим элементом (2), детектируется, используя сигнал датчика на основе волоконной брэгговской решетки (FBG), относящийся к соответствующей волоконной брэгговской решетке (FBG) вихреобразующего элемента (2).
11. Устройство по п. 10, в котором частота (fк) вихрей Кармана ниже частоты собственных колебаний тела (2) датчика или его части (2В).
12. Устройство по любому из пп. 1-3, в котором толщина гибкой части тела датчика меньше 4 мм, предпочтительно меньше 2 мм.
13. Устройство по любому из пп. 1-3, в котором частота собственных колебаний упомянутой части (2В) тела датчика связана со вторым пиком в частотном спектре сигнала детектора, при этом упомянутый второй пик является отдельным от первого, относящегося к частоте вихреобразования, пика в частотном спектре.
14. Устройство по п. 13, в котором первый пик частоты и второй пик частоты отделены на, по меньшей мере, 100 Гц.
15. Устройство по п. 13, в котором блок обработки выполнен с возможностью детектирования упомянутых пиков частот и, в частности, детектирования частоты указанных пиков.
16. Устройство по любому из пп. 1-3, в котором блок обработки выполнен с возможностью определения частотного спектра сигнала детектора.
17. Устройство по любому из пп. 1-3, в котором физическая величина представляет собой плотность (rhо) текучей среды.
18. Устройство для детектирования физической величины движущейся текучей среды, при этом устройство включает в себя:
- тело (2) датчика, выполненное с возможностью простираться в движущуюся текучую среду, при этом тело датчика содержит волоконную брэгговскую решетку (FBG) датчика (3, 7, FBG) на основе волоконной брэгговской решетки для генерирования сигнала детектора, относящегося к возбужденному текучей средой колебанию, по меньшей мере, гибкой части (2В) тела (2) датчика; и
- блок обработки, при этом блок обработки имеет запоминающее устройство или связан с запоминающим устройством, выполненным для хранения начальной частоты fo собственных колебаний части (2В) тела датчика, при этом блок обработки выполнен с возможностью использования сигнала детектора для детектирования основной частоты собственных колебаний гибкой части (2В) тела (2) датчика и для определения отклонения детектированной основной частоты собственного колебания гибкой части (2В) тела (2) датчика от сохраненной начальной частоты собственных колебаний части (2В).
19. Устройство по п. 18, в котором блок обработки выполнен с возможностью определения физической величины на основе детектированного отклонения.
20. Способ детектирования физической величины, включающей в себя по меньшей мере плотность, движущейся текучей среды, используя устройство по любому из пп. 1-17, в котором текучая среда вызывает колебание гибкой части (2В) тела датчика на первой частоте, при этом детектируют частоту собственных колебаний колеблющейся части (2В), при этом частота собственных колебаний является отдельной от первой частоты, при этом детектированную частоту собственных колебаний обрабатывают для определения физической величины.
21. Способ по п. 20, включающий в себя: возбуждение вихрей, которые приводят к колебаниям гибкой части (2В) на частоте вихреобразования, которая ниже частоты собственных колебаний, и детектирование частоты вихреобразования.
22. Способ по п. 21, в котором частоту вихреобразования и частоту собственных колебаний детектируют, используя один и тот же датчик.
23. Способ по любому из пп. 20-22, в котором частоту собственных колебаний детектируют, используя волоконную брэгговскую решетку (FBG).
24. Способ по любому из пп. 20-22, при этом способ включает в себя:
- обеспечение тела (2) датчика, которое простирается в движущуюся текучую среду, при этом тело датчика содержит волоконную брэгговскую решетку (FBG) датчика (3, 7, FBG) на основе волоконной брэгговской решетки, которая генерирует сигнал детектора, относящийся к колебанию, по меньшей мере, гибкой части (2В) тела (2) датчика, при этом упомянутая часть (2В) тела датчика имеет частоту собственных механических колебаний, которая определяется выражением:
f=fо (1+К rhо)-1/2,
где f - частота собственных колебаний гибкой части (2В) в текучей среде (Гц), fо - начальная частота собственных колебаний гибкой части (2В) в вакууме (Гц), rhо - плотность текучей среды (кг/м3) и К - постоянная (м3/кг), связанная с размерами и массой гибкой части (2В),
при этом способ дополнительно включает в себя: обработку упомянутого сигнала детектора для детектирования основной частоты f собственных механических колебаний гибкой части (2В) тела (2) датчика и определение физической величины на основе частоты f собственных механических колебаний.
25. Способ по любому из пп. 20-22, включающий в себя:
обеспечение тела (2) датчика, которое простирается в движущуюся текучую среду, при этом тело датчика содержит волоконную брэгговскую решетку (FBG) датчика (3, 7, FBG) на основе волоконной брэгговской решетки, которая генерирует сигнал детектора, относящийся к колебанию, по меньшей мере, гибкой части (2В) тела (2) датчика; и
- обработку сигнала детектора для детектирования основной частоты собственных механических колебаний гибкой части (2В) тела (2) датчика; и
- определение отклонения детектированной основной частоты собственных колебаний гибкой части (2В) от заданной начальной частоты собственных колебаний части (2В).
26. Способ по п. 24, в котором обработка включает в себя использование частотного спектра сигнала датчика и, в частности, детектирование пика в данном спектре, пик которого связан с упомянутой основной частотой собственных колебаний.
27. Способ по любому из пп. 20-22, в котором частота собственных колебаний составляет менее 1000 Гц.
28. Способ детектирования физической величины, включающей в себя по меньшей мере плотность, движущейся текучей среды, используя устройство по любому из пп. 18 или 19, в котором текучая среда вызывает колебание гибкой части (2В) тела датчика на первой частоте, при этом детектируют частоту собственных колебаний колеблющейся части (2В), при этом частота собственных колебаний является отдельной от первой частоты, при этом детектированную частоту собственных колебаний обрабатывают для определения физической величины.
29. Способ по п. 28, включающий в себя: возбуждение вихрей, которые приводят к колебаниям гибкой части (2В) на частоте вихреобразования, которая ниже частоты собственных колебаний, и детектирование частоты вихреобразования.
30. Способ по п. 29, в котором частоту вихреобразования и частоту собственных колебаний детектируют, используя один и тот же датчик.
31. Способ по любому из пп. 28-30, в котором частоту собственных колебаний детектируют, используя волоконную брэгговскую решетку (FBG).
32. Способ по любому из пп. 28-30, при этом способ включает
в себя:
- обеспечение тела (2) датчика, которое простирается в движущуюся текучую среду, при этом тело датчика содержит волоконную брэгговскую решетку (FBG) датчика (3, 7, FBG) на основе волоконной брэгговской решетки, которая генерирует сигнал детектора, относящийся к колебанию, по меньшей мере, гибкой части (2В) тела (2) датчика, при этом упомянутая часть (2В) тела датчика имеет частоту собственных механических колебаний, которая определяется выражением:
f=fо (1+К rhо)-1/2,
где f - частота собственных колебаний гибкой части (2В) в текучей среде (Гц), fо - начальная частота собственных колебаний гибкой части (2В) в вакууме (Гц), rhо - плотность текучей среды (кг/м3) и К - постоянная (м3/кг), связанная с размерами и массой гибкой части (2В),
при этом способ дополнительно включает в себя: обработку упомянутого сигнала детектора для детектирования основной частоты f собственных механических колебаний гибкой части (2В) тела (2) датчика и определение физической величины на основе частоты f собственных механических колебаний.
33. Способ по любому из пп. 28-30, включающий в себя:
обеспечение тела (2) датчика, которое простирается в движущуюся текучую среду, при этом тело датчика содержит волоконную брэгговскую решетку (FBG) датчика (3, 7, FBG) на основе волоконной брэгговской решетки, которая генерирует сигнал детектора, относящийся к колебанию, по меньшей мере, гибкой части (2В) тела (2) датчика; и
- обработку сигнала детектора для детектирования основной частоты собственных механических колебаний гибкой части (2В) тела (2) датчика; и
- определение отклонения детектированной основной частоты собственных колебаний гибкой части (2В) от заданной начальной частоты собственных колебаний части (2В).
34. Способ по п. 32, в котором обработка включает в себя использование частотного спектра сигнала датчика и, в частности, детектирование пика в данном спектре, пик которого связан с упомянутой основной частотой собственных колебаний.
35. Способ по любому из пп. 28-30, в котором частота собственных колебаний составляет менее 1000 Гц.
| EP 1936332 A1, 25.06.2008 | |||
| DE 102005050400 A1, 26.04.2007 | |||
| US 4281553 A, 04.08.1981 | |||
| УКРЫТИЕ ДЛЯ ГАЛЬВАНИЧЕСКИХ ВАНН | 1993 |
|
RU2077613C1 |
| DE 4316067 A1, 24.11.1994 | |||

