Изобретение относится к области морской подводной техники, а именно к конструкциям движительно-рулевых устройств подводных аппаратов, и предназначено для обеспечения поступательного движения и для изменения направления движения подводных аппаратов, преимущественно тихоходных.
Известны движительно-рулевые устройства торпед и торпедообразных аппаратов (см. например, Ю.А. Боженов и др. «Самоходные необитаемые подводные аппараты», Л., Судостроение, 1986, стр. 8, 9), выполненные в виде гребного винта и двух пар рулей: горизонтальных и вертикальных. Недостатком таких устройств является снижение эффективности рулей при малых скоростях движения, так как гидродинамические силы на рулях пропорциональны квадрату скорости.
Известны движительно-рулевые устройства, содержащие гребной винт в направляющей насадке, обеспечивающие повороты подводного аппарата путем изменения направления вектора тяги гребного винта. Указанное изменение может осуществляться двумя способами. Первый - механический поворот насадки с гребным винтом (см. например, движительно-рулевое устройство мезоскафа «Огюст Пикар». М.Н. Диомидов, А.Н. Дмитриев «Подводные аппараты». Л., Судостроение, 1966, стр. 112-113). Второй - изменение направления потока воды внутри неподвижной насадки за счет подачи воды из внешней среды через боковую поверхность насадки. В статье Феллоуз Б.У. и др. «Направляющие регулируемые насадки для гребных винтов подводных аппаратов» (см. Proc. 6th Cranfield Fluidic Conf, Cambridge p.p. j339-j354) описано устройство, в котором указанная подача воды осуществляется через отверстия в боковой поверхности насадки, снабженные управляемыми заслонками.
Известен движитель, в котором подача воды внутрь насадки происходит при отклонении сегментов - рулей, являющихся частью насадки (патент RU 2139217 С1, опубл. 10.10.1999), взятый в качестве прототипа.
Движительно-рулевые устройства с изменяемым направлением вектора тяги гребного винта обеспечивают эффективное управление движением подводного аппарата, в том числе на малых скоростях. Недостатком таких устройств является снижение тяги гребного винта и, следовательно, скорости подводного аппарата при его поворотах или циркуляции. Это снижение обусловлено несовпадением направлений векторов тяги винта и скорости аппарата, а также уменьшением эффективности насадки вследствие нарушения осесимметричности ее обтекания.
Задачей, на решение которой направлено предлагаемое изобретение, является обеспечение эффективного управления движением подводного аппарата, в том числе и на малых скоростях, при сохранении скорости подводного аппарата во время его маневрирования и движения на циркуляции без увеличения его массогабаритных характеристик.
Технический результат заключается в создании конструкции движительно-рулевого устройства подводного аппарата, обеспечивающей как прямолинейное движение подводного аппарата, так и изменение направления движения без снижения тяги гребного винта и, следовательно, скорости подводного аппарата.
Указанный технический результат достигается тем, что на внутренней поверхности кольцевой направляющей насадки, в которой размещается гребной винт, установлены управляемые интерцепторы с возможностью поворота вокруг осей, параллельных плоскости вращения гребного винта.
Интерцептор, установленный на внутренней поверхности крыла, увеличивает его подъемную силу (см., например, В.И. Егоров «Подводные буксируемые системы» Л., Судостроение, 1984, стр. 139). Вследствие этого, на внутренней поверхности насадки, представляющей собой кольцевое крыло, при отклонении интерцептора возникает поперечная сила. Эта сила обеспечивает поворот подводного аппарата. При этом направление потока в насадке и, соответственно, вектора тяги гребного винта останется неизменным. В результате скорость движения подводного аппарата при поворотах и на циркуляции сохраняется.
Сущность изобретения поясняется чертежом, где показано движительно-рулевое устройство, продольный разрез.
Движительно-рулевое устройство представляет собой гребной винт 1, размещенный в направляющей насадке 2, на внутренней поверхности которой размещены интерцепторы 3 и 4. Интерцепторы имеют возможность поворота относительно осей 5 и 6, параллельных плоскости гребного винта 1. Для осуществления поворота интерцепторы снабжены приводами 7 и 8, которые, в частности, могут содержать зубчатые колеса, связанные с зубчатыми рейками, перемещение которых производится с помощью рулевых машинок. На чертеже интерцептор 3 показан повернутым на угол δ. Двигатель, вращающий винт, детали крепления движительно-рулевого устройства к подводному аппарату и проводка управления рулевыми машинками не показаны.
Работа движительно-рулевого устройства происходит следующим образом. При не отклоненных интерцепторах 3 и 4 гребной винт создает только продольную тягу, обеспечивающую прямолинейное движение подводного аппарата. По команде, подаваемой, например, на привод 7, происходит поворот интерцептора 3 на заданный угол, определяемый, в конечном счете, заданной величиной радиуса циркуляции аппарата. При повороте интерцептора возникает поперечная сила F.
Величина отклоняющей (поперечной) силы F, зависящей от угла отклонения интерцептора δ, определяется формулой:

где R - сила воздействия потока воды со скоростью V на интерцептор, поставленный под углом 90° к потоку, Н:

где, в свою очередь:
Сх - коэффициент лобового сопротивления интерцептора,
ρ - массовая плотность воды, кг/м3,
V - скорость набегающего потока, м/с,
S - эффективная площадь интерцептора, м2.
Направление тяги гребного винта Т при этом не изменяется. Для обеспечения изменения направления движения как в левую, так и в правую сторону устанавливаются друг напротив друга как минимум два интерцептора. Изображенное движительно-рулевое устройство содержит два интерцептора и может обеспечить повороты подводного аппарата только в одной плоскости, например, в горизонтальной. Такое устройство может найти применение в подводных аппаратах, которые удерживаются на заданном отстоянии от грунта с помощью цепного гайдропа-ползуна. В качестве примера такого подводного аппарата можно указать французский «Эполяр» (см. Ю.А. Баженов и др. «Самоходные необитаемые подводные аппараты», Л., Судостроение, 1986, стр. 12). В случае, когда требуется управление в двух плоскостях, в направляющей насадке должны быть установлены четыре интерцептора.
Из проведенных экспериментально-теоретических работ следует, что поворот интерцептора может в 2-2,5 раза увеличить коэффициент подъемной силы крыла. Расчеты и конструктивные проработки, выполненные в обоснование предлагаемого движительно-рулевого устройства, показывают его полезность для обеспечения движения и маневрирования подводных аппаратов.
Таким образом, предлагаемая конструкция движительно-рулевого устройства обеспечивает прямолинейное движение подводного аппарата и изменение направления движения без снижения тяги гребного винта и, следовательно, скорости подводного аппарата, а также, в целом, обеспечивает эффективное управление движением подводного аппарата, в том числе и на малых скоростях, без увеличения его массогабаритных характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АКТИВНОГО УПРАВЛЕНИЯ СУДНОМ | 1996 |
|
RU2142894C1 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ПОДВОДНОГО АППАРАТА | 2002 |
|
RU2222469C1 |
| Движительный комплекс подводного объекта | 2023 |
|
RU2827383C1 |
| ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС СУДНА | 2017 |
|
RU2661271C2 |
| СПОСОБ АКТИВНОГО УПРАВЛЕНИЯ ПЛАВАТЕЛЬНЫМ СРЕДСТВОМ | 2015 |
|
RU2581887C1 |
| АКТИВНЫЙ СТАБИЛИЗАТОР КИЛЕВОЙ И БОРТОВОЙ КАЧКИ КОРАБЛЯ - ШТОРМОВОЙ АВАРИЙНЫЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2384457C2 |
| КОМБИНИРОВАННЫЙ КРЫЛЬЧАТЫЙ ДВИЖИТЕЛЬ ПОДВОДНЫХ АППАРАТОВ | 2023 |
|
RU2806471C1 |
| Подводный планер-глайдер | 2024 |
|
RU2834250C1 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| МЕХАНИЗМ ПОДВИЖНОГО КРЕПЛЕНИЯ ВИНТА В НАСАДКЕ АМФИБИЙНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2341406C1 |
Изобретение относится к области морской подводной техники, а именно к конструкциям движительно-рулевых устройств подводных аппаратов. Движительно-рулевое устройство содержит гребной винт, который размещен в направляющей насадке. Направляющая насадка представляет собой кольцевое крыло. На внутренней поверхности направляющей насадки размещены с возможностью поворота интерцепторы. Оси вращения интерцепторов параллельны плоскости вращения винта. Достигается эффективное управление движением подводного аппарата. 1 ил.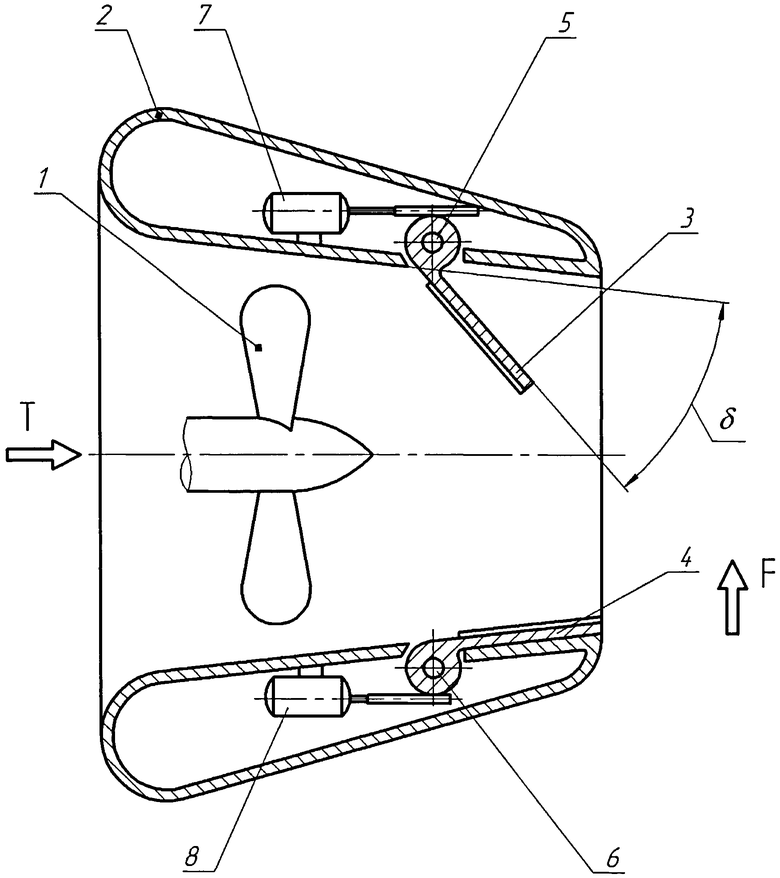
Движительно-рулевое устройство, содержащее гребной винт, размещенный в направляющей насадке, представляющей собой кольцевое крыло, отличающееся тем, что на внутренней поверхности направляющей насадки размещены с возможностью поворота интерцепторы, причем оси вращения интерцепторов параллельны плоскости вращения винта.
| ДВИЖИТЕЛЬ | 1998 |
|
RU2139217C1 |
| СУДОВОЙ ДВИЖИТЕЛЬ-КОНЦЕНТРАТОР | 2009 |
|
RU2438917C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ получения покрытия | 1985 |
|
SU1398932A1 |

