ИНФОРМАЦИЯ О РОДСТВЕННЫХ ЗАЯВКАХ
Данная заявка притязает на преимущество приоритета по патентной заявке США No. 61/249,710, поданной 8 октября 2009 года, под названием «Индексирующий инструмент проверки балансировки для проверки балансировки ротора», которая включена в настоящую заявку во всей полноте посредством ссылки. Данная заявка также является частичным продолжением патентной заявки США No. 12/748,499, поданной 29 марта 2010 года.
ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение, в основном, относится к области проверки балансировки вращающихся частей. В частности, настоящее изобретение направлено на индексирующий инструмент проверки балансировки для проверки балансировки ротора.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Роторы многих типов вращающихся механизмов должны быть сбалансированы для обеспечения бесперебойной работы и долгого срока службы. Например, роторы турбины и компрессора газовых турбин и импеллеры насосов необходимо балансировать для устранения любого дисбаланса в ходе начального этапа производства, и зачастую в связи с периодическим технических обслуживанием. Эти роторы могут иметь широкий диапазон размеров и веса, и проверка балансировки и устранение дисбаланса наиболее крупных из них, например, весом в сотни и тысячи фунтов, могут представлять сложность, отнимать много времени и денежных средств.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В одном варианте осуществления, настоящее изобретение относится к системе. Система включает: индексирующий инструмент проверки балансировки для содействия проверке балансировки ротора механизма, с использованием устройства проверки балансировки, которое содержит приводной механизм, при этом индексирующий инструмент проверки балансировки содержит: поверхность держателя ротора, расположенную на роторе; и приемное устройство держателя ротора, выполненное с возможностью соединения между приводным механизмом устройства проверки балансировки и поверхностью держателя ротора; при этом в результате взаимодействия поверхности держателя ротора и приемного устройства держателя ротора обеспечивается индексирующее соединение между механизмом привода и ротором, при установке ротора с поверхностью держателя ротора и приемным устройством держателя ротора в устройство проверки балансировки.
В другом варианте осуществления, настоящее изобретение относится к системе. Система содержит: модульную систему индексирующего инструмента проверки балансировки для содействия проверке балансировки ротора механизма на устройстве проверки балансировки, которое содержит механизм привода, при этом модульная система индексирующего инструмента проверки балансировки содержит: поверхность держателя ротора, расположенную на роторе; оправку устройства проверки балансировки, выполненную с возможностью соединения между механизмом привода устройства проверки балансировки и поверхностью держателя ротора, при этом в результате взаимодействия поверхности держателя ротора и оправки устройства проверки балансировки обеспечивается первое индексирующее соединение между механизмом привода и ротором, при установке ротора с поверхностью держателя ротора и оправкой в устройство проверки балансировки; и моделирующее балансировку устройство, выполненное с возможностью соединения между механизмом привода устройства проверки балансировки и держателем ротора, при этом, в результате взаимодействия поверхности держателя ротора и моделирующего балансировку устройства обеспечивается второе индексирующее соединение между механизмом привода и ротором.
В еще одном варианте осуществления, настоящее изобретение относится к системе. Система содержит: устройство проверки балансировки, которое содержит механизм привода; ротор для какого-либо узла механизма, при этом ротор устанавливают в устройство проверки балансировки; индексирующий инструмент проверки балансировки для содействия проверке балансировки ротора в устройстве проверки балансировки, при этом индексирующий инструмент проверки балансировки соединен с механизмом привода и ротором и содержит: поверхность держателя ротора, расположенную на роторе; и приемное устройство держателя ротора соединенное с механизмом привода и поверхностью держателя ротора; при этом, в результате взаимодействия поверхности держателя ротора и приемного устройства держателя ротора обеспечивается индексирующее соединение между механизмом привода и ротором.
В еще одном варианте осуществления, настоящее изобретение относится к способу. Способ содержит: обеспечение ротора узла механизма; при этом ротор содержит поверхность держателя ротора; и соединение приемного устройства держа геля ротора с поверхностью держателя ротора таким образом, чтобы установить индексирующее соединение между ротором и приемным устройством держателя ротора.
В еще одном варианте осуществления настоящее изобретение относится к способу. Способ содержит: обеспечение устройства проверки балансировки; обеспечение ротора узла механизма; обеспечение индексирующего инструмента проверки балансировки; установку ротора в первом положении индексации с использованием индексирующего инструмента проверки балансировки; управление устройством проверки балансировки для вращения индексирующего инструмента проверки балансировки и ротора для проверки ротора на дисбаланс в первом положении индексации; установку ротора во втором положении индексации, отличном от первого положения индексации с использованием индексирующего инструмента; и управление устройством проверки балансировки для вращения индексирующего инструмента проверки балансировки и ротора для проверки ротора на дисбаланс во втором положении индексации.
В дополнительном варианте осуществления, настоящее изобретение относится к на индексирующему инструменту проверки балансировки, применяемому для проверки балансировки ротора, при этом ротор является компонентом отдельного вращающегося устройства, имеющего функцию, отличную от проверки балансировки, и радиально проходящая, по меньшей мере, главным образом, плоская поверхность ротора перпендикулярна оси вращения ротора. Инструмент содержит: приемное устройство держателя ротора, которое содержит выступ, радиально отходящий от вала, при этом приемное устройство держателя ротора определяет поверхность приемного устройства; первый участок кинематического крепления, расположенного на поверхности приемного устройства; поверхность держателя, сформированную непосредственно на плоской поверхности ротора, при этом поверхность держателя содержит второй участок кинематического крепления для того, чтобы первый участок и второй участок вместе формировали кинематическое крепление между ротором и приемным устройством держателя ротора; и средства для совместного смещения поверхности держателя и приемного устройства.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
С целью изображения изобретения, на графических материалах изображены виды одного или более вариантов осуществления изобретения. Однако следует понимать, что настоящее изобретение не ограничено точными конфигурациями и техническими средствами, показанными на графических материалах, на которых:
На фиг.1 показан вид с боку в вертикальном разрезе индексирующего инструмента проверки балансировки в составе системы балансировки для проверки ротора на дисбаланс;
На фиг.2 показан изометрический вид в продольном разрезе ротора и индексирующего инструмента проверки балансировки, соединенного с ротором;
На фиг.3А и 3В показаны увеличенные аксиальные виды приемного устройства держателя ротора и держателя ротора, соответственно, по фиг.2, с изображением их элементов кинематического соединения;
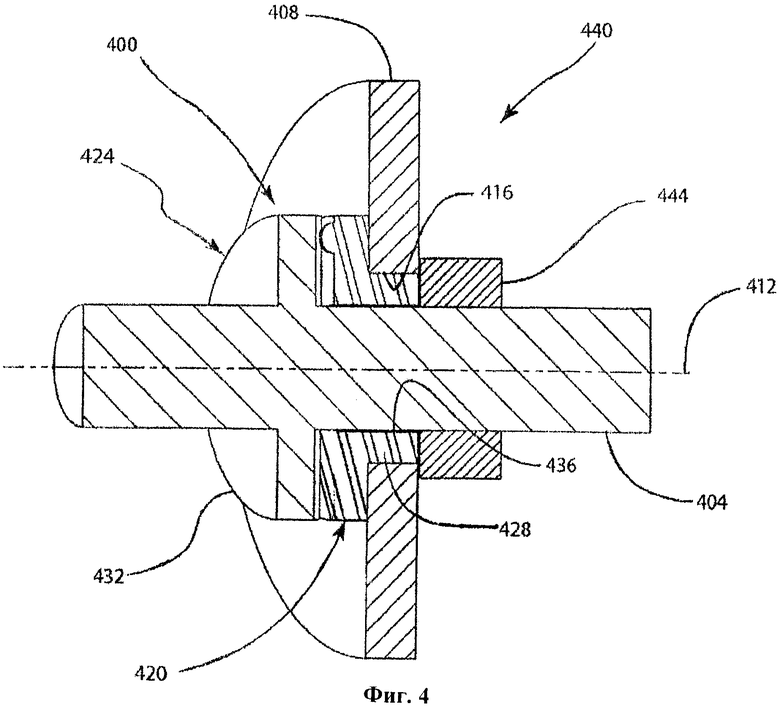
На фиг.4 показан изометрический вид в продольном разрезе еще одного ротора и еще одного индексирующего инструмента балансировки, соединенного с ротором;
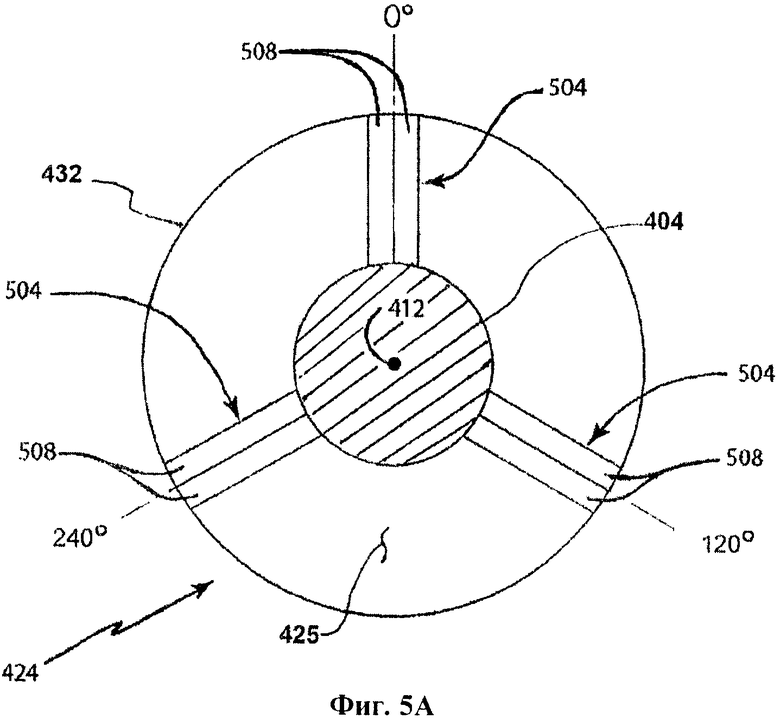
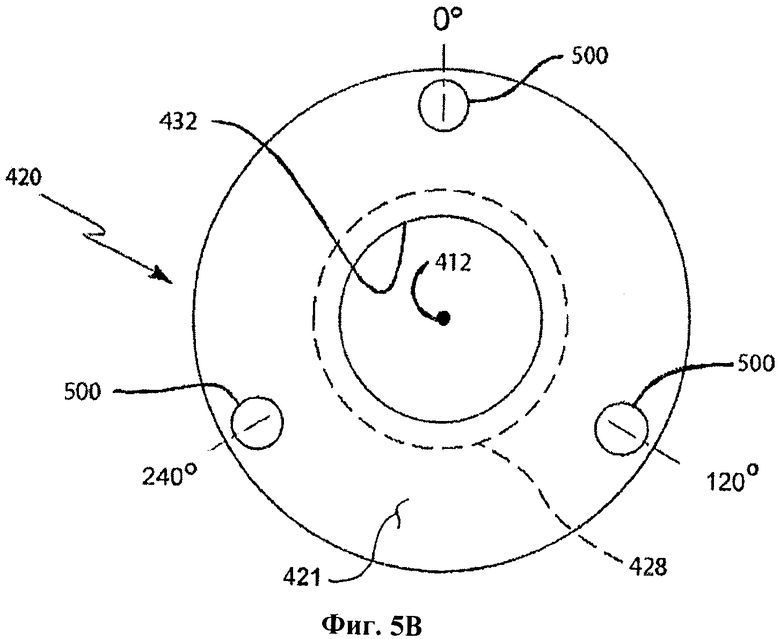
На фиг.5А и 5В показаны увеличенные аксиальные виды приемного устройства держателя ротора и держателя ротора, соответственно, по фиг.4, с изображением их элементов кинематического соединения;
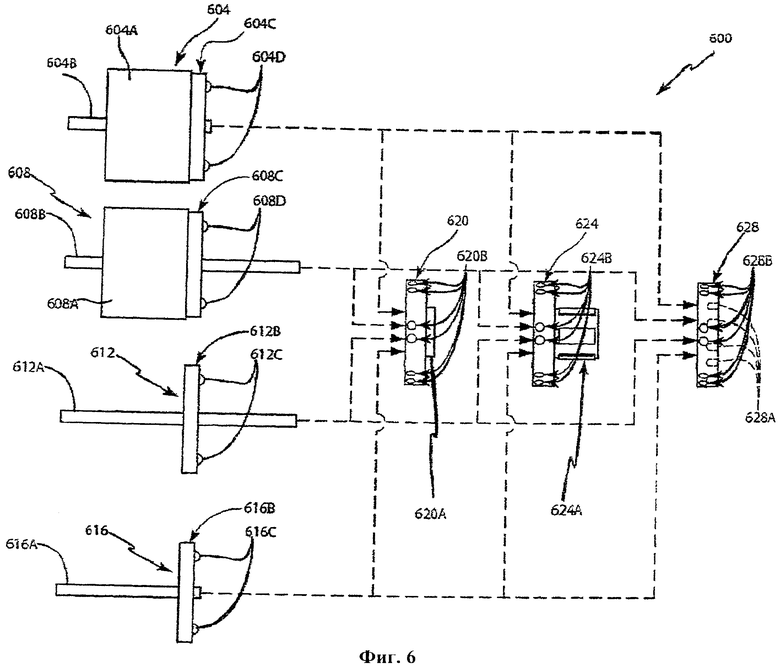
На фиг.6 показана диаграмма составленной из модулей системы индексирующего инструмента проверки балансировки, которая содержит взаимозаменяемые компоненты;
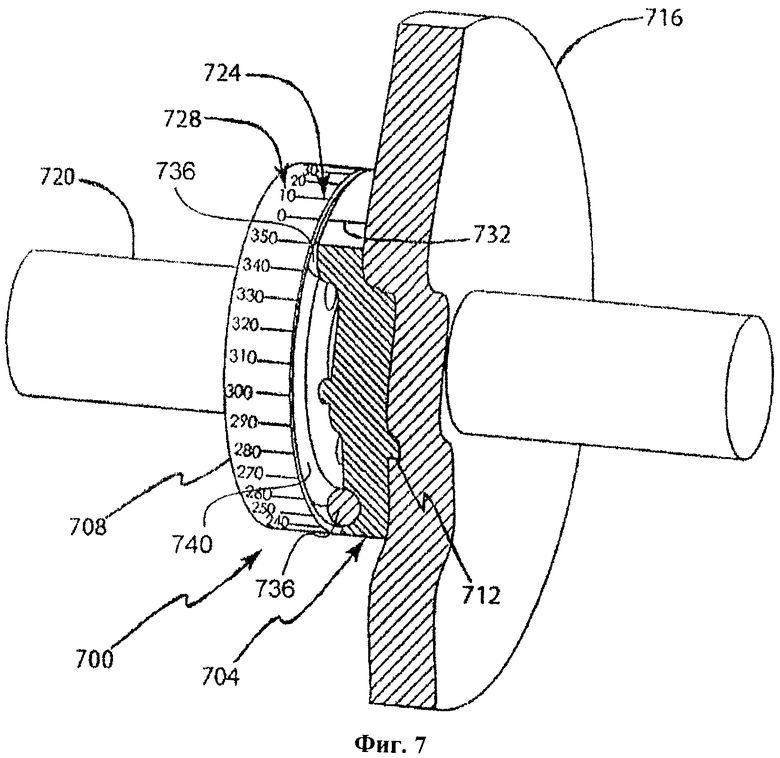
На фиг.7 показан частичный изометрический вид в разрезе опытного агрегата, который содержит индексирующий инструмент проверки балансировки, содержащий индексирующую шкалу;
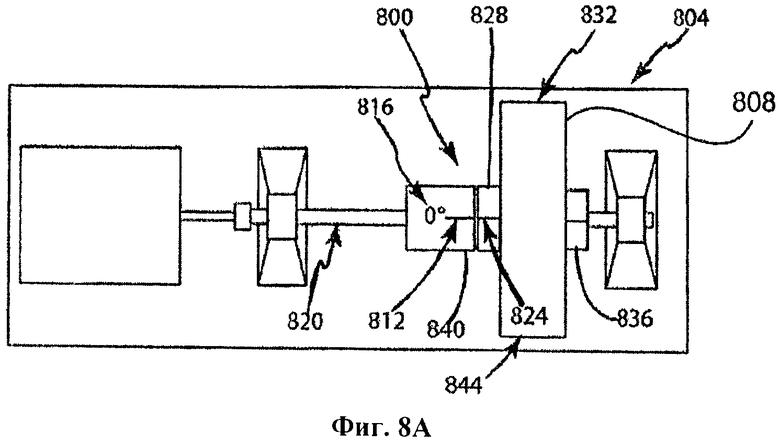
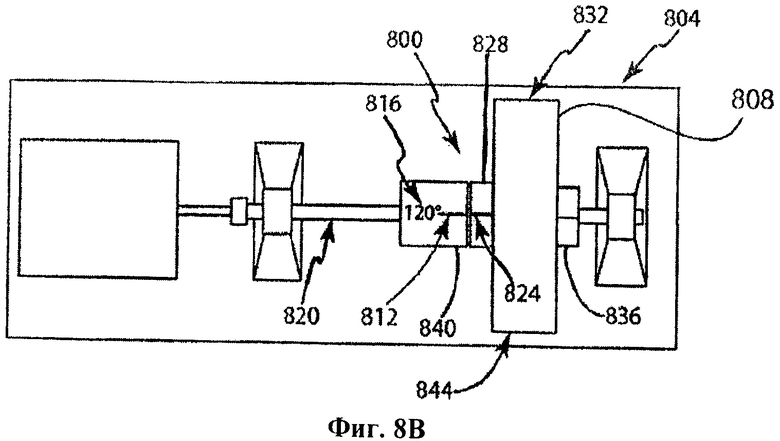
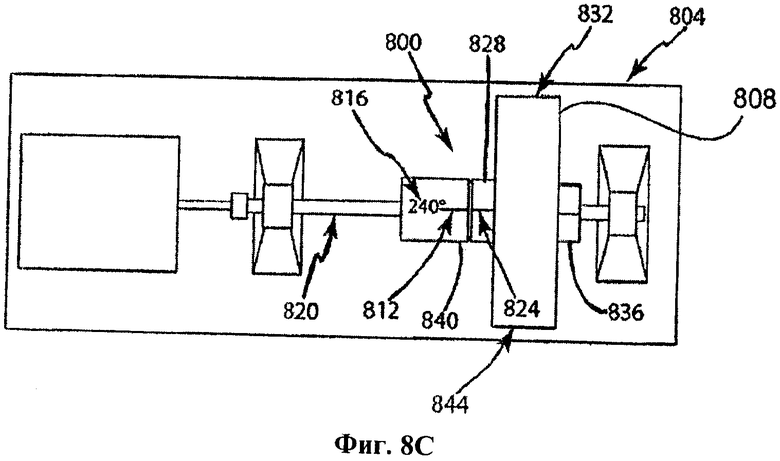
Па фиг.8А показан вид сверху системы балансировки с изображением ротора, индексированного в положении индексации 0° индексирующего инструмента; на фиг.8 В показан вид сверху системы балансировки по фиг.8А с изображением ротора, индексированного в положении индексации 120° индексирующего инструмента; на фиг.8С показан вид сверху системы балансировки по фиг.8А-В с изображением ротора, индексированного в положении индексации 240° индексирующего инструмента;
На фиг.9 показан график последовательности операций, иллюстрирующий в качестве примера процесс балансировки с использованием системы балансировки по фиг.8A-C; и
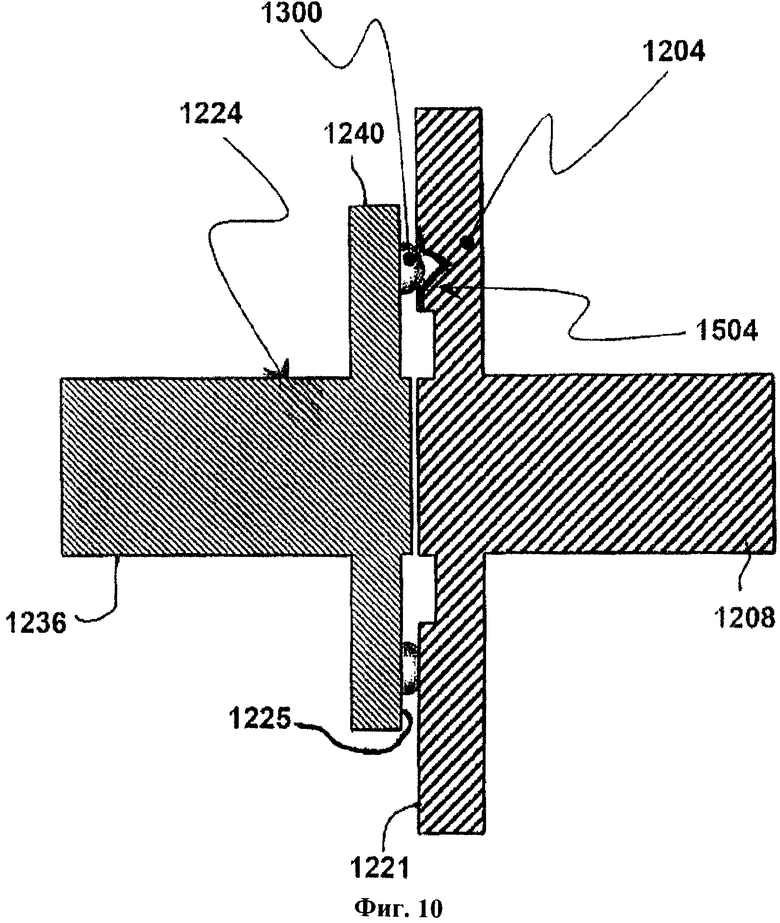
На фиг.10 показан вид в продольном разрезе альтернативного варианта осуществления ротора и индексирующего инструмента проверки балансировки в соответствии с настоящим изобретением;
ПОДРОБНОЕ ОПИСАНИЕ
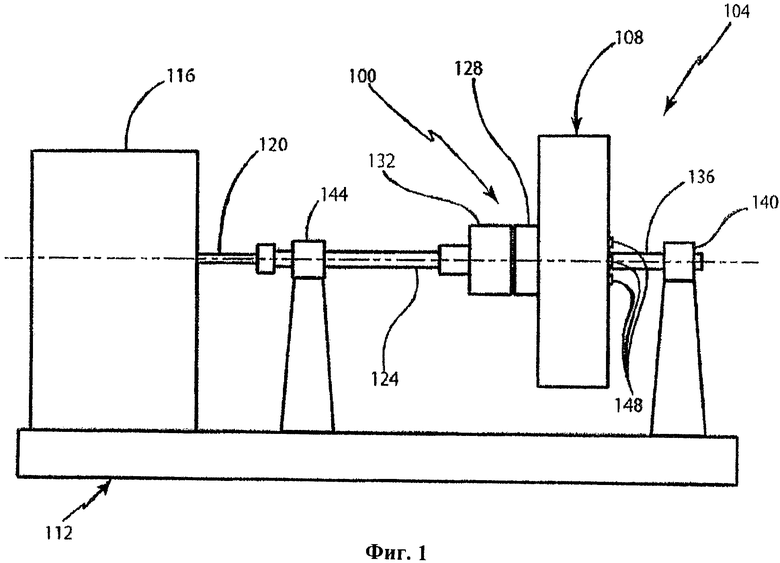
Теперь, относительно графических материалов, на фиг.1 показан индексирующий инструмент проверки балансировки 100 в рамках всей системы балансировки 104, в которой ротор 108 проверяют на дисбаланс устройством проверки балансировки 112. Как будет более подробно описано далее, инструмент 100 позволяет пользователю легко и точно выставить или индексировать ротор 108 в различные положения индексации во время процедуры проверки, а также добиться высокой повторяемости, в смысле точности, для всех положений индексации. Специалисты в данной области техники легко определят по прочтению всего описания изобретения, что использование инструмента 100 может значительно уменьшить время, затрачиваемое не только на осуществление проверки на дисбаланс, но также на корректировку любого дисбаланса в роторе, таком как ротор 108. Например, во время проверки, ротор 108 можно легко установить из настоящего положения индексации в другое положение индексации без необходимости удаления и повторной фиксации оправки к ротору, как обычно происходит в традиционных процессах. Еще один пример, когда после обнаружения дисбаланса в роторе 108 при помощи инструмента 100, и после настройки ротора с целью устранения дисбаланса, ротор может быть переустановлен и точно установлен с использованием инструмента в положения индексации, которые использовались при предыдущей проверке. Таким образом, может быть проведена еще одна проверка балансировки с высокой повторяемостью индексации. Ниже описаны примеры, иллюстрирующие эти и другие свойства индексирующего инструмента проверки балансировки настоящего изобретения, такого как инструмент 100. По для начала, ниже более подробно описаны другие компоненты системы 104 для контекста.
Специалисты в данной области техники легко определят, что ротором 108 может быть любая из многих разновидностей вращающихся конструкций, таких как компрессор, турбина или его составляющее (например, пакет лопаток), или составляющее газовой турбины (например, реактивный двигатель), импеллер насоса, маховое колесо, и, фактически, любая другая вращающаяся конструкция узла механизма, на котором может негативно сказываться несбалансированность ротора в процессе эксплуатации. Следовательно, под используемым здесь и в прилагаемых пунктах формулы изобретения термином «ротор» следует понимать деталь, которая является составляющей агрегата, или собственно агрегатом, сконструированным для вращения при эксплуатации, и которая во время процесса балансировки ротора может требовать обработки специальным инструментом для его приспособления к балансирующему устройству. В то время как индексирующий инструмент проверки балансировки 100 может быть приспособлен для использования с ротором 108 фактически любого размера и веса, он может быть особенно выгодным для роторов, в случае которых, из-за их веса, геометрии, стоимости починки/замены, традиционные способы балансировки повышают риск.
Устройство для проверки балансировки 112 может быть, фактически, любым устройством, подходящим для проверки балансировки ротора 108, таким как обычное устройство для проверки балансировки. Примеры стандартов для устройств балансировки и стандартов проверки балансировки для аэрокосмической промышленности содержат рекомендуемые технологии аэрокосмического строительства (ARP) Ассоциации инженеров автомобилестроения (SAE) SAE ARP 587, SAE ARP 588, SAE ARP 4048 и SAE ARP 4050. среди прочих. Другие отрасли промышленности могу иметь похожие стандарты для различных типов роторов. Устройство проверки балансировки 112 и его использование могут соответствовать любому из этих или других стандартов, или других правил эксплуатации. Устройство проверки балансировки 112 содержит механизм привода 116, который содержит выходной вал 120, который вращает ротор 108 во время проверки. Механизм привода 116 может быть любым подходящим механизмом привода, таким как электродвигатель с регулируемой скоростью с прямой передачей, электродвигатель/сочетание регулируемых приводов, механизм с ременным приводом или механизм с цепным приводом, среди прочих. В данном примере, выходной вал 120 соединен с балансировочной оправкой 124, которая в свою очередь соединена с индексирующим инструментом проверки балансировки 100. В других вариантах осуществления изобретения, выходной вал 120 может быть соединен непосредственно с инструментом 100 или с моделирующим балансировку устройством (не показано), которое соединено с выходным валом и инструментом. Специалисты в данной области техники поймут, что моделирующее балансировку устройство используют в некоторых случаях проверки на дисбаланс для моделирования вращения одной или более частей, которые будут вращаться вместе с проверяемым ротором, когда ротор находится в собранном агрегате, но которые не присутствуют при проверке. Моделирующее балансировку устройство является съемным устройством соответствующей жесткости, с такими же динамическими характеристиками (центр масс, масса и моменты инерции), как и ротор, или часть ротора, которые оно заменяет. Следует понимать, что используемый здесь и в прилагаемых пунктах формулы изобретения термин «.моделирующее балансировку устройство» и подобные термины охватывает устройства, также известные под другими названиями, такие как «ПМИ» (полярный момент инерции), и «разгрузочные роторы».
В данном примере, инструмент 100 содержит держатель 128 ротора и приемное устройство 132 держателя ротора. Держатель 128 ротора прочно прикреплено к ротору 108 посредством использования любой подходящей технологии фиксации, такой как горячая запрессовка ротора на держатель ротора для создания плотной фрикционной посадки или использование гидроприводных звеньев, встроенных в держатель ротора, среди прочих. Следует отметить, что, как более подробно описано ниже, держатель 128 ротора может оставаться в фиксированном контакте с ротором 108 во время проверки с некоторым количеством положений индексации, и/или во время последовательностей проверок и перепроверок. В данном примере, приемное устройство 132 держателя ротора прочно прикреплено к балансировочной оправке 124, а ротор 108 содержит центральное отверстие (не показано), которое принимает вращающийся стержень (не показано), когда ротор встроен в готовый механизм. Для размещения данной конфигурации ротора 108, приемное устройство 132 держателя ротора содержит сквозной вал 136, который проходит сквозь центральное отверстие ротора и взаимодействует с соответствующей опорой вращения 140 на устройстве проверки балансировки 112. С противоположной стороны, ротор 108 поддерживается опорой вращения 144 на устройстве проверки балансировки 112.
Держатель 128 ротора и приемное устройство 132 держателя ротора подвижны относительно друг друга, так чтобы ротор 108 мог быть индексирован в более чем одном положение индексации относительно приемного устройства держателя ротора. В данном примере держатель 128 ротора и приемное устройство 132 держателя ротора сконфигурированы в трех положениях индексации, разнесенных друг от друга на 120°. В других вариантах осуществления индексирующий инструмент проверки балансировки, изготовленный в соответствии с данным изобретением, может содержать любое количество положений индексации. Положения индексации могут быть определены дискретными индексирующими стопорами, или могут не останавливаться, таким образом, позволяя ротор 108 занимать любое из бесконечных положений индексации. В данном примере используют набор резьбовых соединений 148 для неподвижного зацепления держателя 128 ротора и приемного устройства 132 держателя ротора друг с другом для фиксации ротора 108 в его текущем положении индексации. Чтобы сменить положение индексации ротора 108 с одного на другое, удаляют соединения 148, вращают ротор и держатель 128 ротора в другое положение индексации, и повторно устанавливают соединения. Аналогично, если необходимо извлечь ротор 108 из устройства проверки балансировки 112 перед выполнением дальнейшей проверки для того чтобы, например, отрегулировать ротор, удаляют соединения 148, и, таким образом, только ротор и держатель 128 ротора могут быть извлечены. Ротор 108 (с держателем ротора 128, все еще прикрепленным к ротору) и соединения 148 могут быть повторно установлены на устройство проверки балансировки 112, при этом ротор находится в желаемом положении индексации относительно приемного устройства 132 держателя ротора, которое может находиться в таком же положении индексации, как и до удаления из устройства проверки балансировки. В других вариантах осуществления могут быть использованы другие фиксирующие средства вместо соединений 148, подходящие для определенной конструкции.
Как описано ниже, держатель 128 ротора и приемное устройство 132 держателя ротора могут быть сконфигурированы таким образом, чтобы обеспечить кинематическое соединение или квазикинематическое соединение между ротором 108 и механизмом привода 116, когда держатель ротора и приемное устройство контактируют друг с другом. Как известно из уровня техники, кинематическое соединение традиционно имеет 6 точек опоры, что является строгим ограничивающим условием, то есть желаемым ограничивающим условием без излишества. Возможно, самым распространенным среди кинематических соединений является конфигурация из трех шариков/трех пазов, в которой один компонент соединения содержит три «шарика», расположенных по окружности с расстоянием между центрами 180°, а другой компонент содержит три соответствующих радиальных паза, также расположенных по окружности с расстоянием между центрами 180°. Когда шарики фиксируются в соответствующих относительных пазах, создается ровно шесть точек соприкосновения шариков и боковых стенок пазов. Следует отметить, что тогда как один набор элементов называют «шариками», потому что их форма зачастую сферическая, подобные элементы других форм, таких как форма усеченного конуса, эллипсоидальная форма, также называют «шариками». Следовательно, значение используемого в изобретении и в прилагаемых пунктах формулы изобретения термина «шарики» охватывает элементы других форм с похожими функциями. Кинематические соединения обеспечивают сверхмикронную точность выравнивания и крайне высокую повторяемость выравнивания. Пример кинематического соединения, подходящего для использования в индексирующем инструменте проверки балансировки в соответствии с настоящим изобретением, таком как инструмент 100, можно найти в патенте США №6,746,172, Culpepper, под названием «Apparatus And Method For Accurate, Precise, And Adjustable Kinematic Coupling)), содержание которого включено в данную заявку посредством ссылки, так в нем описаны кинематические соединения.
Квазикинематические соединения очень похожи на кинематические соединения, но используют дугообразные зоны контакта, а не точечные контакты. Эти дугообразные зоны имеют несколько менее четкие ограничивающие условия, однако, должным образом сконструированные квазикинематические соединения могут обеспечивать сверхмикронную точность выравнивания, и крайне высокую повторяемость выравнивания, так же, как и кинематические соединения со строго ограничивающими условиями. Более подробную информацию о кинематических и квазикинематических соединениях можно найти в M.L. Culpepper, "Design of quasi-kinematic couplings"Precision Engineering 28 (2004) 338-357, содержание которого включено в данную заявку посредством ссылки, так как в нем описаны квазикинематические соединения. Ввиду сходства между кинематическими и квазикинематическими соединениями, предполагается, что далее в заявке и в приложенных пунктах формулы и в реферате термин «кинематическое соединение» охватывает кинематические и квазикинематические соединения. Ниже описано несколько подробных примеров индексирующих инструментов проверки балансировки с использованием кинематических соединений.
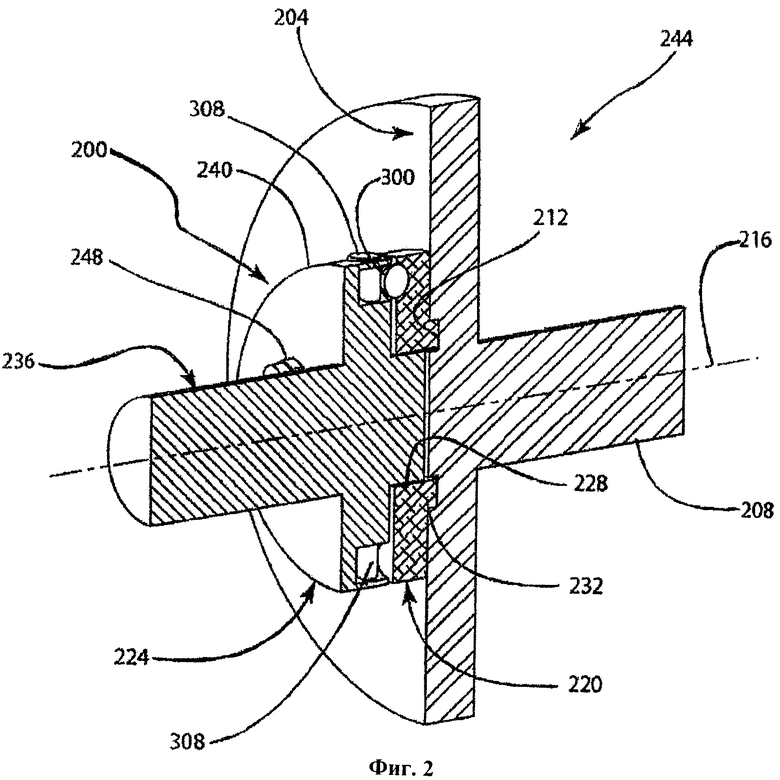
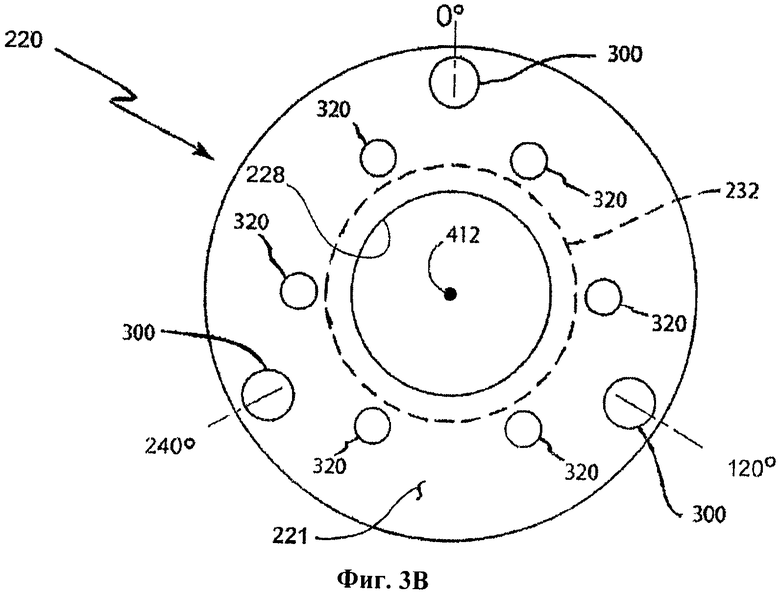
На фиг.2 и 3А, и 3В показан индексирующий инструмент проверки балансировки 200, подходящий для использования с ротором с «полуосью» (или «коротким валом») (с валом только на одной стороне ротора), например ротором 204 с полуосью, как показано на фиг.2. Так же как и ротор 108 на фиг.1, ротор 204 может быть ротором из любого из многих узлов механизма. В данном примере ротор 204 содержит вал 208 и имеет кольцевой паз 212, соосный с осью вращения 216 ротора. Индексирующий инструмент проверки балансировки 200 содержит держатель 220 ротора и приемное устройство 224 держателя ротора. Как показано на фиг.2, держатель 220 ротора имеет преимущественно форму диска и содержит центральное отверстие 228, соосное с осью вращения 216 ротора 204. В данном примере цилиндрический выступ 232 предусмотрен для крепления держателя 220 ротора к ротору 204 посредством фрикционной посадки в пределах кольцевого паза 212 в роторе. Специалисты в данной области техники определят, что могут быть задействованы многие типы или категории посадок. В качестве другого примера, может быть задействована технология горячей запрессовки, которая включает нагревание (или охлаждение) либо держателя 220 ротора, либо ротора 204 относительно друг друга, создавая контакт между выступом 232 и пазом 212 и позволяя двум компонентам достигнуть равновесной температуры, таким образом, получая взаимосвязь между выступом и боковой стенкой паза.
Как лучше показано на фиг.2. приемное устройство 224 держателя ротора содержит полуось 236 и соединительный участок 240. Полуось 236 взаимодействует с валом 208 для обеспечения всего агрегата 244 точками опоры на обеих сторонах ротора 204 для крепления в устройстве проверки балансировки, таком как устройство проверки балансировки 112 на фиг.1, или другом устройстве проверки балансировки. В данном примере соединительный участок 240 контактирует с держателем 220 ротора для обеспечения индексируемого соединения по типу дискретных положений индексации. А точнее, в данном примере держатель 220 ротора и соединительный участок 240 сконфигурированы для обеспечения шести положений индексации для ротора 204 относительно приемного устройства 224 держателя ротора с использованием кинематических соединительных элементов.
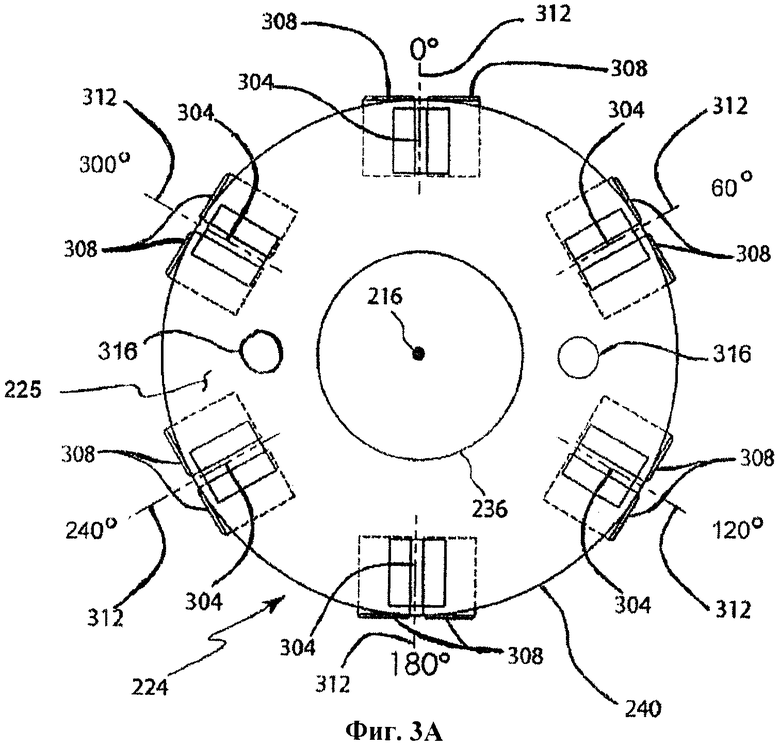
Далее ссылаясь главным образом на фиг.3А и 3В, кинематические соединительные элементы на держателе 220 ротора содержат три сферических шарика 300, расположенных на поверхности 221 держателя по окружности с расстоянием между центрами 120°. Соединительный участок 240 содержит шесть радиальных углублений 304, расположенных на поверхности 225 приемного устройства по окружности с расстоянием между центрами 60°. Каждому углублению 304 соответствует набор из двух параллельных стержней 308, расположенных одинаково удаленно от радиальной центральной линии 312 углубления. Когда держатель 220 ротора должным образом вступает в контакт с соединительным участком 240 приемного устройства 224 держателя ротора, три шарика 300 вступают в контакт с тремя соответствующими углублениями из шести углублений 304 в последовательности с пропуском отдельных позиций, и контактируют с каждым из шести соответствующих стержней 308 только в одном положении, чтобы, таким образом, добиться точных кинематических ограничивающих условий. Специалисты в данной области техники без труда поймут, что, так как шарики 300 расположены с расстоянием между центрами 120°, а углубления 304 и пары стержней расположены с расстоянием между центрами 60°, шарики могут вступать в контакт с углублениями таким способом, чтобы обеспечивать шесть положений индексации 0°, 60°, 120°, 180°, 240° и 300°. При выборе и установке желаемого положения, держатель 220 ротора прочно скрепляют с соединительным участком 240 приемного устройства 224 держателя ротора посредством пары винтов 248 (на фиг.2 показан только один, но в данном примере присутствуют два винта, соответствующие двум отверстиям для винтов 316 на соединительном участке 240 на фиг.3А). Держатель 220 ротора содержит шесть резьбовых отверстий 320 для винтов для размещения винтов 248, и расположенных таким образом, чтобы разместить все шесть положений индексации.
На фиг.4, 5А и 5В показан индексирующий инструмент проверки балансировки 400, который содержит сквозной вал 404 для размещения ротора без вала, такого как ротор 408 на фиг.4, который может быть ротором любого из множества механизмов. Ссылаясь сначала на фиг.4, ротор 408 сконструирован для вращения вокруг оси вращения 412 и содержит центральное отверстие 416, в котором фиксируется стержень (не показано) в собранном агрегате, частью которого он является. Инструмент 400 содержит держатель 420 ротора и приемное устройство 424 держателя ротора. Держатель 420 ротора содержит цилиндрический выступ 428, сцепленный с ротором 408 посредством фрикционной посадки в пределах отверстия 416, которое прочно и неподвижно скрепляет держатель ротора с ротором. Такая фрикционная посадка может быть изготовлена с применением технологии горячей запрессовки. Альтернативные способы крепления держателя 420 ротора к ротору 408 включают обеспечение выступа 428 с гидравлически подвижными звеньями, приводимыми в действие для неподвижной фиксации внутренней периферии отверстия 416. Если бы ротор 408 содержал отверстия для винтов вокруг отверстия 416 для соединения ротора и имеющего выступы держателя на стержне, выступ 428 мог бы быть удален с держателя 420 ротора, и ротор мог бы быть прикреплен винтами непосредственно к держателю ротора посредством, например, набора резьбовых отверстий, которые соответствуют отверстиям для винтов на роторе. Также могут быть использованы и другие способы крепления держателя 420 ротора к ротору 408.
Приемное устройство 424 держателя ротора содержит сквозной вал 404 и соединительный участок 432, сформированный на сквозном вале. Сквозной вал 404 проходит сквозь центральное отверстие 436 в держателе 420 ротора и имеет длину, выбираемую для размещения опор устройства проверки балансировки (не показано) с расстоянием между ними, в которое будет установлен агрегат 440 для проверки на дисбаланс. Соединительный участок 432 может быть цельным со сквозным валом 404 или, альтернативно, может быть сформирован как отдельный компонент с последующим креплением к сквозному валу. В данном примере держатель 420 ротора и соединительный участок 432 приемного устройства 424 держателя ротора содержат кинематические соединительные элементы, которые обеспечивают инструмент 400 шестью положениями индексации для ротора 408.
Как лучше видно на фиг.5А и 5В, кинематические соединительные элементы на держателе 420 ротора содержат три сферических шарика 500, расположенных на поверхности 421 держателя по окружности с расстоянием между центрами 120°. Соединительный участок 432 содержит три радиальных V-образных паза 504, сформированных на поверхности приемного устройства 425, расположенных по окружности с расстоянием между центрами 120°. Когда держатель 420 ротора должным образом зацеплен с соединительным участком 432 приемного устройства 424 держателя ротора, три шарика 500 входят в зацепление с соответствующими шариками V-образных пазов 504 и контактируют с каждой из соответствующих боковых стенок 508 только в одной точке, чтобы таким образом добиться точных ограничивающих условий. Специалисты в данной области техники без груда поймут, что, так как шарики 500 расположены с расстоянием между центрами 120°, а V-образные пазы 504 расположены с расстоянием между центрами 120°, шарики могут вступать в контакт с V-образными пазами таким способом, чтобы обеспечивать три положения индексации 0°, 120° и 240°. При выборе и установке желаемого положения индексации, держатель 420 ротора сильно смещают до зацепления с соединительным участком 432 приемного устройства 424 держателя ротора посредством гайки 444 (фиг.4), которая соединена резьбой со сквозным валом 404.
В еще одном альтернативном варианте осуществления, как показано на фиг 10, поверхность держателя ротора может быть сформирована посредством использования поверхности непосредственно ротора, таким образом, устраняя необходимость в отдельном держателе ротора. Обычно такие роторы имеют поверхность, перпендикулярную оси вращения ротора. Эта поверхность может быть в целях удобства использована посредством добавления соединительных элементов, которые в противном случае не используются ротором в части исполняемой им функции как части устройства при нормальном использовании. В одном таком примере осуществления, поверхность 1221 ротора 1204 с полуосью представляет собой поверхность держателя при наличии на ней V-образных пазов 1504, сформированных непосредственно на ней. V-образные пазы могут быть сформированы как описано выше. В этом варианте осуществления, шарики 1300 расположены на поверхности 1225 приемного устройства также как описано выше. Для фиксации соединительного участка 1240 с ротором 1204 с полуосью на каждой части могут быть предоставлены отверстия для винтов (не показано), как описано выше, в соответствии с вариантами осуществления на фиг.3А и 3В. Таким образом, приемное устройство 1224 держателя ротора, которое вращается на полуоси 1236, сцеплено непосредственно с ротором 1204 с полуосью, который вращается на вале 1208 ротора, для создания кинематического соединения. В варианте осуществления, например, показанном на фиг.10, неточность процесса балансировки может быть еще более уменьшена посредством удаления одного из соединительных компонентов в результате использования половины кинематического держателя в описанную конструкцию ротора.
Некоторые преимущества или выгоды могут быть получены благодаря варианту осуществления, показанному на фиг.10. Например, посредством исключения отдельного ротора, может быть устранена погрешность при стыковке держателя ротора и ротора. В результате этого можно улучшить повторяемость крепления между ротором и кинематическим креплением. Также, может быть снижена затратная стоимость оборудования, а ротор может допускать широкий выбор вариантов конструкций оборудования. Также, может быть уменьшено время, затрачиваемое на балансировку, так как оборудование может монтироваться непосредственно на ротор, при этом не нужно сначала настраивать половину соединений под ротор, так как ротор становится половиной соединения. Более того, при такой конструкции кинематическое соединение может быть приспособлено к разным роторам без необходимости в индивидуальных устройствах сопряжения.
На фиг.6 показана модульная система индексирующего инструмента проверки балансировки 600, которая может быть полезна для минимизации времени, затрачиваемого на проведение процессов балансировки на нескольких роторах (не показано) различных типов и/или конфигураций. С иллюстративной целью в этом примере модульная система 600 содержит четыре приемных устройства 604, 608, 612, 616 держателей ротора и три держателя 620, 624, 628 ротора. Приемные устройства 604, 608 являются устройствами моделирующего типа, упомянутыми выше по отношению к фиг.1, тогда как приемные устройства 612, 616 держателей ротора выполнены как устройства немоделирующего типа. Как упомянуто выше, некоторые проверки на дисбаланс проводят с использованием моделирующих устройств для моделирования одного или более участков собранного вращающегося агрегата, которые отсутствуют при проверке. Такие моделирующие устройства настроены для полного или частичного соответствия свойствам вращательного движения отсутствующего(их) участка(ов). Следовательно, каждое из приемных устройств 604, 608 держателя ротора содержит моделируемый участок 604А, 608А. также как и короткий вал 604В, 608В для взаимодействия с опорной частью (не показано) устройства проверки балансировки и соединительный участок 604С, 608С для соединения приемного устройства с любым из держателей 620, 624, 628 ротора. Основное различие между приемными устройствами 604, 608 держателя ротора заключается в том, что приемное устройство 604 предназначено для ротора с полуосью, а приемное устройство 608 предназначено для ротора без вала. Подобным образом, опорные части 612, 616 держателя ротора предназначено для ротора без вала и для ротора с полуосью, соответственно. Как указано выше, опорные части 612, 616 держателя ротора выполнены как устройства немоделирующего типа и, таким образом, не содержат моделирующие участки, такие как в опорных частях 604, 608. Следовательно, приемное устройство 612, 616 держателя ротора содержит центральный вал 612А, 616А относительно небольшого диаметра, подходящий для взаимодействия с одной или несколькими опорными частями устройства проверки балансировки, и соединительный участок 612 В, 616 В для соединения приемного устройства с любым из креплений 620, 624, 628 ротора. Приемные устройства 612, 616 держателя ротора подходят для проверки на дисбаланс, если моделирующее устройство не требуется или не желаемо.
Держатели 620, 624, 628 ротора сконфигурированы для взаимодействия с различными роторами. Например, держатель 620 ротора содержит цилиндрический выступ 620А для взаимодействия, например, с кольцевым пазом в роторе с полуосью, таком как держатель 220 ротора по фиг.2. Держатель 624 ротора содержит гидроприводное захватное устройство 624А с подвижными звеньями для захвата, например, внутренней периферии центрального отверстия в роторе без вала. Этот случай может быть приравнен к случаю с держателем 420 ротора на фиг.4 с той разницей, что горячая запрессовка заменена захватом посредством захватного устройства 624А. Следует отметить, что захватное устройство 624А может быть спроектировано для размещения отверстий различных диаметров, чтобы держатель 624 ротора мог быть использован для различных роторов без необходимости отдельной установки каждого ротора. Держатель 628 ротора содержит всего лишь резьбовые отверстия крепления 628А для размещения резьбовых соединений ротора, который содержит соответствующие отверстия для винтов. Такой ротор может быть без вала или содержать полуось.
Каждый из соединительных участков 604С, 608С, 612В, 616В и каждое из креплений 620, 624, 628 ротора содержит индексирующие элементы, которые позволяют каждому из приемных устройств 604, 608, 612, 616 держателей ротора соединятся с любым из держателей ротора, таким способом, который обеспечивает индексирующий инструмент проверки балансировки для каждой пары. В показанном примере, каждый из соединительных участков 604С, 608С, 612В, 616В содержит три шарика 604D, 608D, 612С, 616С (только двое видны в каждом соединительном участке), похожих на шарики 300 на фиг.3, и каждый из держателей ротора содержит шесть стержневых приемных устройств 620В, 624В, 628В для шариков (в каждом держателе показаны только четыре), что имеет сходство с конфигурацией держателя 220 ротора, как показано на фиг.3. Как обсуждалось выше, относительно фиг.2 и 3, именно такая конфигурация индексирующих элементов обеспечивает кинематическое соединение, которое содержит шесть положений индексации, разнесенных на 60° друг от друга. Конечно, эти индексирующие элементы являются всего лишь иллюстративными, и специалисты в данной области техники определят, что и другие типы элементов могут быть использованы, включая элементы, которые обеспечивают неограниченные возможности настройки индексации. Специалисты в данной области техники также определят, что количество и тип держателей ротора и количество и тип держателей ротора, показанного на фиг.6, являются всего лишь примерами, и возможны многие другие размеры и конфигурации этих компонентов с сохранением модульной структуры.
На фиг.7 показан индексирующий инструмент проверки балансировки 700. который обеспечивает индексацию с интервалом в 20°. Инструмент 700 похож на держатель 704 ротора и приемное устройство 708 держателя ротора. В этом примере, держатель 704 ротора похож на держатель 420 ротора, показанный на фиг.4, тем, что он содержит похожий цилиндрический выступ 712 для взаимодействия с ротором, таким как ротор 716. Приемное устройство 708 держателя ротора в этом примере немного отличается от приемных устройств 224, 424, 604, 612, 616 держателя ротора, показанных на фиг.2-6 тем, что оно сконфигурировано как адаптер для разновидностей ровной оправки 720. С такой конфигурацией приемное устройство 708 держателя ротора может быть прикреплено к оправке 720 любым подходящим способом, например, посредством соединения винтами. Инструмент 700 содержит индексирующую шкалу, которая помогает пользователю выбирать и устанавливать положение индексации для ротора 716 относительно приемного устройства 708 держателя ротора.
В этом примере, индексирующая шкала содержит деления 724 и значения угла 728 на внешней периферии приемного устройства 708 держателя ротора и соответствующую метку соосности 732 на внешней периферии держателя 704 ротора. Специалисты в данной области техники определят, что индексирующая шкала, показанная на фиг.7, является всего лишь иллюстративной, и другая шкала может быть использована в других вариантах осуществления. Также, показанная шкала может быть обратной с делениями 724 и значениями угла 728 на держателе 704 ротора и меткой соосности 732 на приемном устройстве 708 держателя ротора. Соединительные элементы на держателе 704 ротора и приемном устройстве 708 держателя ротора содержат три шарика 736 (только один виден фиг.7), и сплошной кольцевой паз 740, соответственно. Это позволяет инструменту 700 обеспечивать кинематическое соединение с постоянно изменяющейся возможностью настройки и высокой степенью повторяемости для заданного углового положения. В этом примере деления 724 расположены через каждые 10°. Следует отметить, что в других вариантах осуществления с делениями 724, расположенными через интервал в 10°, инструмент 700 может быть сконфигурирован для обеспечения дискретного индексирования, то есть положения индексации расположены только с интервалом в 10°. Другие, не описанные элементы инструмента 700 могут быть похожими на аналогичные элементы индексирующих инструментов проверки балансировки на фиг.1-6. Индексирующие инструменты проверки балансировки на фиг.1-6 могут включать подходящие индексирующие элементы таким же, или похожим способом, как способ только что описанный по отношению к инструменту 700.
На фиг.8А-С и 9 показан пример способа 900 (фиг.9) использования индексирующего инструмента проверки балансировки, изготовленного в соответствии с настоящим изобретением, такого как инструмент 800 на фиг.8А-С. Перед тем как описывать способ 900, предоставляется контекст способа. Относительно фиг.8А-С, инструмент 800 используют в устройстве проверки балансировки 804, для проверки ротора 808 на дисбаланс, как до, так и после того, как ротор откорректирован для исправления первоначально установленного дисбаланса. Инструмент 800 в этом примере, в целом, аналогичен инструменту 400 на фиг.4 и 5, за исключением того, что инструмент 800 на фиг.8А-С содержит видимую индексирующую шкалу в форме делений 812 и значений угла 816 на приемном устройстве 820 держателя ротора в положениях 0°, 120° и 240°, и соответствующую метку соосности 824 на держателе 828 ротора. (Следует обратить внимание на то, что инструмент 400 на фиг.4 и 5 содержит кинематические соединительные элементы, которые обеспечивают ровно три положения индексации 0°, 120° и 240°.) В способе 900 проверка на дисбаланс производится посредством сбора информации о дисбалансе, когда ротор 808 находится в каждом из положений индексации 0°, 120° и 240°.
Ссылаясь теперь на фиг.9, а также на фиг.8А-С, как было отмечено, способ 900 может начинаться этапом 905, на котором держатель 828 ротора плотно прикрепляют к ротору 808 для создания агрегата 832 держатель/ротор. Хотя это может быть выполнено посредством использования любой подходящей технологии, в одном примере это осуществляется посредством использования технологии горячей запрессовки. На этапе 910, приемное устройство 824 держателя ротора взаимодействует с агрегатом 832 держатель/ротор, при этом ротор 808 находится в положении индексации 0° (фиг.8А), а гайку 836 устанавливают для сильного смещения агрегата держатель/ротор к соединительному участку 840 приемного устройства держателя ротора и для создания опытного агрегата 844. На этапе 915 опытный агрегат 844 устанавливают в устройство проверки балансировки 804, а на этапе 920 производят балансировочный цикл с ротором 808 в положении индексации 0°. Не считая уникального способа, посредством которого ротор 808 индексируют с использованием индексирующего инструмента проверки балансировки, изготовленного в соответствии с настоящим изобретением, управление устройством проверки балансировки 804 может не отличаться от управления устройством проверки балансировки в любом известном процессе балансировки. Таким образом, описание этапа 920 является излишним для специалистов в данной области техники для осуществления способа 900.
После осуществления балансировочного цикла с ротором 808 в положении индексации 0°, на этапе 925 ротор индексируют в положение индексации 120°. Это может быть осуществлено посредством ослабления гайки 836 и вращения агрегата 832 держатель/ротор относительно приемного устройства 820 держателя ротора непосредственно в пределах устройства проверки балансировки 804, пока метка соосности 824 на держателе 828 ротора полностью или частично не совпадет с меткой 812, соответствующей положению индексации 120° (фиг.8 В). Затем гайку 836 снова затягивают для сильного смещения держателя 828 ротора для зацепления с соединительным участком 840 приемного устройства 820 держателя ротора, таким образом, чтобы точно задать положение индексации посредством полного зацепления соответствующих относительных кинематических соединительных элементов. На этапе 930 осуществляют балансировочный цикл с ротором 808. установленным в положении индексации 120°.
После осуществления балансировочного цикла с ротором 808 в положении индексации 120°, на этапе 935 ротор индексируют в положении индексации 240°.
Как указано выше, это может быть осуществлено посредством ослабления гайки 836 и вращения агрегата 832 держатель/ротор относительно приемного устройства 824 держателя ротора непосредственно в пределах устройства проверки балансировки 804, пока метка соосности 824 на держателе 828 ротора полностью или частично не совпадет с меткой 812, соответствующей положению индексации 240° (фиг.8С). Затем гайку 836 снова затягивают для сильного смещения держателя 828 ротора для зацепления с соединительным участком 840 приемного устройства 820 держателя ротора, таким образом, чтобы точно задать положение индексации посредством полного зацепления соответствующих относительных кинематических соединительных элементов. На этапе 940 осуществляют балансировочный цикл с ротором в положении индексации 240°.
На этапе 945 определяют, свидетельствуют ли результаты балансировочных циклов, осуществленных в каждом из положений индексации 0°, 120° и 240°, о прохождении ротором 808 проверки на дисбаланс. Как известно специалистам в данной области техники, это может быть осуществлено посредством, например, устройства проверки балансировки 804 и/или любого другого анализирующего дисбаланс оборудования, которое может анализировать информацию, собранную во время проверочных циклов в различных положениях индексации. Если определено, что ротор 808 прошел проверку, на этапе 950 опытный агрегат 844 извлекают из устройства проверки балансировки 804, агрегат 832 держатель/ротор извлекают из опытного агрегата, а держатель 828 ротора извлекают из ротора. Ротор 808 теперь готов к возвращению на производственный процесс по изготовлению устройства (не показано), частью которого будет являться ротор.
Если на этапе 945 определено, что ротор 808 не прошел проверку на дисбаланс, на этапе 955 определяют, какие настройки ротора следует произвести для корректировки дисбаланса. Это может быть осуществлено посредством любой известной технологии, например, с использованием устройства проверки балансировки 804 и/или информации, собранной из балансировочных циклов, осуществленных на этапах 920. 930, 940. В этом примере предполагается, что корректировки должны быть произведены вне устройства проверки балансировки 804, например, в специальном корректировочном отделе завода. Также, в этом примере, корректировки производят в то время как держатель 828 ротора остается прикрепленным к ротору 808. Следовательно, на этапе 960 опытный агрегат 844 извлекают из устройства проверки балансировки 804, агрегат 832 держатель/ротор извлекают из приемного устройства 820 держателя ротора и отправляют агрегат держателя ротора в корректировочный отдел. На этапе 965 производят корректировки ротора 808 для устранения дисбаланса. Это может быть осуществлено с использованием известных технологий, таких как добавление материала, удаление материала, замена одного или более компонентов, смещение компонентов, добавление нагрузок и т.д. После того как ротор 808 был откорректирован, его повторно проверяют посредством возврата на этап 910. Кинематическое соединение индексирующего инструмента проверки балансировки 800 позволяет производить повторную проверку с высокой повторяемостью относительно каждой предыдущей проверки ротора 808 на дисбаланс.
В нижеследующих параграфах описаны дополнительные альтернативные примеры вариантов осуществления настоящего изобретения.
В одном примере система в соответствии с вариантом осуществления изобретения содержит индексирующий инструмент проверки балансировки для содействия проверке на дисбаланс ротора устройства с использованием устройства проверки балансировки, которое содержит механизм привода, при этом индексирующий инструмент проверки балансировки содержит поверхность держателя ротора, расположенную на роторе, и приемное устройство держателя ротора, сконфигурированное для соединения между механизмом привода устройства проверки балансировки и поверхностью держателя ротора; поверхность держателя ротора и приемное устройство держателя ротора взаимодействуют друг с другом для обеспечения индексирующего соединения между механизмом привода и ротором, когда ротор с поверхностью держателя ротора и приемным устройством держателя ротора установлен в устройстве проверки балансировки. Такой пример варианта осуществления может также содержать один или несколько из нижеперечисленных элементов:
Поверхность держателя ротора сформирована на креплении ротора для неподвижной фиксации к ротору.
Индексирующее соединение является кинематическим соединением.
Поверхность держателя ротора и приемное устройство держателя ротора взаимодействуют для обеспечения нескольких индексирующих стопоров для индексирования ротора относительно приемного устройства держателя ротора.
Поверхность держателя ротора и приемное устройство держателя ротора сконфигурированы так, чтобы пользователь мог изменять индексирование ротора, когда ротор установлен в устройстве проверки балансировки.
Приемное устройство держателя ротора содержит оправку устройства проверки балансировки.
Приемное устройство держателя ротора содержит моделирующее балансировку устройство.
Приемное устройство держателя ротора сконфигурировано для установки в оправку устройства проверки балансировки.
Ротор содержит ось вращения, вокруг которой ротор вращается во время работы устройства. Система дополнительно содержит фиксирующие средства для смещения поверхности держателя ротора и приемного устройства держателя ротора для зацепления друг с другом в направлении, параллельном оси вращения ротора, когда инструмент балансировки и ротор установлены в устройстве проверки балансировки.
Поверхность держателя ротора сформирована на поверхности ротора.
В другом примере система в соответствии с вариантом осуществления изобретения содержит модульную систему индексирующего инструмента проверки балансировки для содействия в балансировке ротора устройства на устройстве проверки балансировки, которое содержит механизм привода. Модульная система индексирующего инструмента проверки балансировки содержит поверхность держателя ротора, расположенную на роторе, оправку устройства проверки балансировки, сконфигурированную для соединения между механизмом привода устройства проверки балансировки и поверхностью держателя ротора, при этом, поверхность держателя ротора и оправка устройства проверки балансировки взаимодействуют друг с другом для обеспечения первого индексирующего соединения между механизмом привода и ротором, когда ротор, поверхность держателя ротора и оправка установлены в устройстве проверки балансировки; и моделирующее балансировку устройство, сконфигурировано для соединения между механизмом привода устройства проверки балансировки и держателем ротора, при этом поверхность держателя ротора и моделирующее балансировку устройство взаимодействуют друг с другом для обеспечения второго индексирующего соединения между механизмом привода и ротором. Такой пример варианта осуществления может также содержать один или несколько из нижеперечисленных элементов:
Индексирующее соединение является кинематическим соединением.
Поверхность держателя ротора и приемное устройство держателя ротора взаимодействуют друг с другом для обеспечения нескольких индексирующих стопоров для индексирования ротора относительно приемного устройства держателя ротора.
Поверхность держателя ротора и приемное устройство держателя ротора сконфигурированы так, чтобы пользователь мог изменять индексирование ротора, когда ротор установлен в устройстве проверки балансировки.
Поверхность держателя ротора сформирована на держателе ротора, сконфигурированном для неподвижной фиксации к ротору.
Поверхность держателя ротора сформирована на поверхности ротора.
В еще одном примере система в соответствии с вариантом осуществления изобретения содержит устройство проверки балансировки, которое содержит механизм привода; ротор для узла механизма, при этом ротор устанавливают в устройство проверки балансировки; индексирующий инструмент проверки балансировки для содействия проверке балансировки ротора в устройстве проверки балансировки, при этом индексирующий инструмент проверки балансировки соединен между механизмом привода и ротором и содержит поверхность держателя ротора, расположенную на роторе; и приемное устройство держателя ротора соединено между механизмом привода и поверхностью ротора; и поверхность держателя ротора и приемное устройство держателя ротора взаимодействуют друг с другом для обеспечения индексирующего соединения между механизмом привода и ротором. Такой пример варианта осуществления может также содержать один или несколько из нижеперечисленных элементов:
Индексирующее соединение является кинематическим соединением.
Поверхность держателя ротора и приемное устройство держателя ротора взаимодействуют друг с другом для обеспечения нескольких индексирующих стопоров для индексирования ротора относительно приемного устройства держателя ротора.
Поверхность держателя ротора и приемное устройство держателя ротора сконфигурированы так, чтобы пользователь мог изменять индексирование ротора, когда ротор установлен в устройстве проверки балансировки.
Приемное устройство держателя ротора содержит оправку устройства проверки балансировки.
Приемное устройство держателя ротора содержит моделирующее балансировку устройство.
Приемное устройство держателя ротора содержит переходную пластину, сконфигурированную для крепления к оправке устройства проверки балансировки.
Ротор содержит ось вращения, вокруг которой ротор вращается во время работы устройства. Система дополнительно содержит фиксирующие средства для зацепления поверхности держателя ротора и приемного устройства держателя ротора друг с другом в направлении, параллельном оси вращения ротора, когда инструмент балансировки и ротор установлены в устройстве проверки балансировки.
Поверхность держателя ротора сформирована на держателе ротора, сконфигурированном для неподвижной фиксации к ротору.
Поверхность держателя ротора сформирована на поверхности ротора.
В еще одном примере способ в соответствии с вариантом осуществления изобретения содержит обеспечение ротора узла механизма, при этом ротор содержит поверхность держателя ротора; и соединение приемного устройства держателя ротора с поверхностью держателя ротора таким образом, чтобы формировалось индексирующее соединение между ротором и приемным устройством держателя ротора. Такой пример варианта осуществления может также содержать один или несколько из нижеперечисленных элементов:
Установка агрегата и индексирующего соединения в устройство проверки балансировки.
Фиксирование ротора в первом положении индексации относительно приемного устройства держателя ротора с использованием индексирующего соединения и управление устройством проверки балансировки для проверки ротора на дисбаланс в первом положении индексации.
Фиксирование ротора во втором положении индексации, отличном от первого положения индексации, и управление устройством проверки балансировки для проверки ротора на дисбаланс во втором положении индексации.
Соединение приемного устройства держателя ротора с поверхностью держателя ротора включает неподвижную фиксацию держателя ротора, в том числе поверхности держателя ротора к ротору, и соединение держателя ротора с приемным устройством держателя ротора таким образом, чтобы формировалось кинематическое соединение между ротором и приемным устройством держателя ротора.
Неподвижная фиксация включает прессовую посадку ротора и держателя ротора друг к другу.
Неподвижная фиксация держателя ротора к ротору с применением гидравлического механизма.
Соединение приемного устройства держателя ротора и поверхности держателя ротора содержит соединение ротора и оправки устройства проверки балансировки.
Соединение приемного устройства держателя ротора и поверхности держателя ротора содержит соединение ротора и моделирующего балансировку устройства.
В другом примере способ в соответствии с вариантом осуществления изобретения содержит обеспечение устройства проверки балансировки; обеспечение ротора узла механизма; обеспечение индексирующего инструмента проверки балансировки: установление ротора в первом положении индексации с использованием индексирующего инструмента проверки балансировки; управление устройством проверки балансировки для вращения индексирующего инструмента проверки балансировки и ротора для проверки ротора на дисбаланс в первом положении индексации; установление ротора во втором положении индексации, отличном от первого положения индексации, с использованием индексирующего инструмента; и управление устройством проверки балансировки для вращения индексирующею инструмента проверки балансировки и ротора для проверки ротора на дисбаланс во втором положении индексации. Такой пример варианта осуществления может также содержать один или несколько из нижеперечисленных элементов:
Обеспечение индексирующего инструмента проверки балансировки включает обеспечение индексирующего инструмента проверки балансировки, который содержит кинематическое соединение.
Обеспечение индексирующего инструмента проверки балансировки включает обеспечение индексирующего инструмента проверки балансировки, который содержит держатель ротора, неподвижно прикрепленный к ротору, и приемное устройство держателя ротора, подвижно прикрепляемое к держателю ротора.
Установление ротора во втором положении индексации включает настройку кинематического соединения.
В еще одном примере индексирующий инструмент проверки балансировки в соответствии с вариантом осуществления изобретения содержит приемное устройство держателя ротора, которое содержит выступ, отходящий радиально от вала, при этом приемное устройство держателя ротора определяет поверхность приемного устройства; первый участок кинематического соединения, расположенный на поверхности приемного устройства; поверхность держателя, сформированную непосредственно на плоской поверхности ротора, при этом поверхность держателя содержит второй участок кинематического крепления таким образом, чтобы первый участок и второй участок вместе формировали кинематическое крепление между ротором и приемным устройством держателя ротора; и средства для смещения поверхности держателя и приемного устройства друг к другу. Такой индексирующий инструмент проверки балансировки предназначен для использования в проверке балансировки ротора, при этом ротор является компонентом отдельного вращающегося устройства, имеющего функцию, отличную от проверки балансировки, и радиально отходящая, по меньшей мере, в основном, плоская, поверхность ротора, перпендикулярная оси вращения ротора. Такой пример варианта осуществления может также включать один или несколько из нижеперечисленных элементов:
Первый участок индексирующего инструмента проверки балансировки содержит шарики, расположенные на поверхности приемного устройства; и поверхность держателя содержит радиально отходящие механически обработанные пазы в роторе. Такие пазы могут быть сформированы и откалиброваны для создания контакта в двух точках вдоль боковых стенок с одним шариком, и нет необходимости в их использовании в работе ротора.
Средства смещения содержат, по меньшей мере, два винта, расположенных между ротором и приемным устройством держателя ротора.
Средства смещения содержат вал, отходящий от приемного устройства держателя ротора через ротор; и резьбовой элемент, сформированный на пазе и направленный противоположно ротору.
Примеры вариантов осуществления были раскрыты выше и показаны в прилагаемых графических материалах. Специалисты в данной области техники поймут, что в раскрытом здесь могут быть сделаны различные изменения, опущения и дополнения без отклонения от сущности и объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ОБЪЕКТА | 1999 |
|
RU2147733C1 |
| Устройство для определения величины дисбаланса при статической балансировке | 1981 |
|
SU993073A1 |
| СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2010 |
|
RU2455624C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| Устройство для балансировки ротора турбомашины | 2016 |
|
RU2731151C2 |
| ИНСТРУМЕНТ ДЛЯ БАЛАНСИРОВКИ МОДУЛЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2016 |
|
RU2711248C2 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2008 |
|
RU2425345C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА И СТАНОК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2075737C1 |
| Балансировочный станок для статической балансировки роторов | 1982 |
|
SU1133489A1 |
| Устройство для статической балансировки роторов | 1975 |
|
SU718739A1 |

Заявленные изобретения относятся к измерительной технике и могут быть использованы в балансировочной технике, в частности для балансировки ротора. Инструмент пошагового перемещения проверки балансировки содержит поверхность держателя ротора, расположенную на проверяемом роторе, содержащую кинематические соединительные элементы держателя ротора, и приемное устройство держателя ротора, при этом приемное устройство держателя ротора содержит соответствующие кинематические соединительные элементы приемного устройства держателя ротора. Поверхность держателя ротора может быть механически обработанной на поверхности ротора или предоставленной на отдельном держателе ротора, временно прикрепленном к ротору. Поверхность держателя ротора и приемное устройство держателя ротора сконфигурированы для обеспечения соединения при пошаговом перемещении, которое позволяет легко индексировать ротор в любом из нескольких положений индексации для проверки на дисбаланс в устройстве проверки балансировки. Инструмент позволяет производить несколько балансирующих циклов без особых усилий, необходимых для повторного пошагового перемещения ротора. Способ включает использование указанного инструмента пошагового перемещения проверки балансировки. 2 н. и 24 з.п. ф-лы, 10 ил.
1. Система для балансировки ротора, содержащая:
инструмент пошагового перемещения проверки балансировки для содействия проверке балансировки ротора механизма с использованием устройства проверки балансировки, содержащего механизм привода, при этом указанный инструмент пошагового перемещения проверки балансировки содержит:
поверхность держателя ротора, расположенную на роторе, содержащую кинематические соединительные элементы держателя ротора; и
приемное устройство держателя ротора, выполненное с возможностью установки между механизмом привода устройства проверки балансировки и указанной поверхностью держателя ротора, причем приемное устройство держателя ротора содержит соответствующие кинематические соединительные элементы приемного устройства держателя ротора;
причем в результате взаимодействия указанной поверхности держателя ротора и указанного приемного устройства держателя ротора обеспечивается кинематическое соединение при пошаговом перемещении между механизмом привода и ротором при установке ротора с указанной поверхностью держателя ротора и указанным приемным устройством держателя ротора в устройство проверки балансировки.
2. Система по п.1, в которой поверхность держателя ротора сформирована на держателе ротора, выполненном с возможностью неподвижной фиксации с ротором.
3. Система по п.1, в которой поверхность держателя ротора сформирована на поверхности ротора.
4. Система по п.1, в которой указанная поверхность держателя ротора и указанное приемное устройство держателя ротора взаимодействуют для обеспечения нескольких остановок при пошаговом перемещении для пошагового перемещения ротора относительно указанного приемного устройства держателя ротора.
5. Система по п.4, в которой указанная поверхность держателя ротора и указанное приемное устройство держателя ротора выполнены с возможностью предоставления пользователю возможности пошагового перемещения ротора, когда ротор установлен в устройстве проверки балансировки.
6. Система по п.1, в которой указанное приемное устройство держателя ротора содержит оправку устройства проверки балансировки.
7. Система по п.1, в которой указанное приемное устройство держателя ротора содержит моделирующее балансировку устройство.
8. Система по п.1, в которой указанное приемное устройство держателя ротора выполнено с возможностью установки в оправку устройства проверки балансировки.
9. Система по п.1, в которой ротор содержит ось вращения, вокруг которой указанный ротор вращается в процессе работы в механизме, и система дополнительно содержит фиксирующее средство для смещения указанной поверхности держателя ротора и указанного приемного устройства держателя ротора для зацепления друг с другом в направлении, параллельном оси вращения ротора, когда указанный инструмент пошагового перемещения проверки балансировки и ротор установлены в устройстве проверки балансировки.
10. Система по любому из пп.1-9, в которой
приемное устройство держателя ротора содержит оправку устройства проверки балансировки, выполненную с возможностью установки между механизмом привода устройства проверки балансировки и указанной поверхностью держателя ротора, при этом указанная поверхность держателя ротора и указанная оправка устройства проверки балансировки взаимодействуют друг с другом для обеспечения первого соединения при пошаговом перемещении между механизмом привода и ротором, когда ротор, указанная поверхность держателя ротора и указанная оправка установлены в устройство проверки балансировки; и
система дополнительно содержит моделирующее балансировку устройство, выполненное с возможностью установки между механизмом привода устройства проверки балансировки и указанным держателем ротора, при этом указанная поверхность держателя ротора и указанное моделирующее балансировку устройство взаимодействуют друг с другом для обеспечения второго соединения при пошаговом перемещении между механизмом привода и ротором.
11. Система по п.10, в которой каждое указанное соединение при пошаговом перемещении является кинематическим соединением.
12. Система по любому из пп.1-4, в которой указанное устройство проверки балансировки содержит механизм привода, а указанный ротор предназначен для узла механизма, при этом указанный ротор установлен в указанное устройство проверки балансировки.
13. Способ балансировки ротора, включающий:
обеспечение ротора узла механизма, при этом указанный ротор содержит поверхность держателя ротора с установленными на ней кинематическими соединительными элементами держателя ротора; и
соединение приемного устройства держателя ротора, имеющего соответствующие кинематические соединительные элементы приемного устройства держателя ротора, с поверхностью держателя ротора таким образом, чтобы сформировать узел с кинематическим соединением при пошаговом перемещении между ротором и приемным устройством держателя ротора.
14. Способ по п.13, дополнительно включающий установку агрегата и соединения при пошаговом перемещении в устройство проверки балансировки.
15. Способ по п.14, дополнительно включающий фиксирование ротора в первом положении пошагового перемещения относительно приемного устройства держателя ротора с использованием соединения при пошаговом перемещении и управление устройством проверки балансировки для проверки ротора на дисбаланс в первом положении пошагового перемещения.
16. Способ по п.15, дополнительно включающий фиксацию ротора во втором положении пошагового перемещения, отличном от первого положения пошагового перемещения, и управление устройством проверки балансировки для проверки ротора на дисбаланс во втором положении пошагового перемещения.
17. Способ по п.13, в котором указанное соединение приемного устройства держателя ротора и поверхности держателя ротора включает неподвижную фиксацию держателя ротора, в том числе поверхности держателя ротора и ротора, и соединение держателя ротора и приемного устройства держателя ротора таким образом, чтобы сформировать кинематическое соединение между ротором и приемным устройством держателя ротора.
18. Способ по п.17, в котором указанная неподвижная фиксация включает прессовую посадку ротора на держатель ротора.
19. Способ по п.17, в котором указанная неподвижная фиксация включает неподвижную фиксацию держателя ротора с ротором при помощи гидравлического механизма.
20. Способ по п.13, в котором указанное соединение приемного устройства держателя ротора и поверхности держателя ротора включает соединение ротора и оправки устройства проверки балансировки.
21. Способ по п.13, в котором указанное соединение приемного устройства держателя ротора и поверхности держателя ротора включает соединение ротора и моделирующего балансировку устройства.
22. Способ по п.13, в котором дополнительно неподвижно фиксируют к ротору держатель ротора, содержащего поверхность держателя ротора.
23. Способ по п.13, в котором поверхность держателя ротора содержит поверхность ротора.
24. Способ по любому из пп.13-16, дополнительно включающий:
обеспечение устройства проверки балансировки;
обеспечение инструмента пошагового перемещения проверки балансировки;
задание ротору первого положения пошагового перемещения с использованием инструмента пошагового перемещения проверки балансировки;
управление устройством проверки балансировки для вращения инструмента пошагового перемещения проверки балансировки и ротора для проверки ротора на дисбаланс в первом положении пошагового перемещения;
задание ротору второго положения пошагового перемещения, отличного от первого положения пошагового перемещения, с использованием инструмента пошагового перемещения; и
управление устройством проверки балансировки для вращения инструмента пошагового перемещения проверки балансировки и ротора для проверки ротора на дисбаланс во втором положении пошагового перемещения.
25. Способ по п.22, в котором указанное обеспечение инструмента пошагового перемещения проверки балансировки включает обеспечение инструмента пошагового перемещения проверки балансировки, содержащего держатель ротора, неподвижно прикрепленный к ротору, и приемное устройство держателя ротора, подвижно прикрепляемое к держателю ротора.
26. Способ по п.22, в котором указанное задание ротору второго положения пошагового перемещения включает регулировку кинематического соединения.
| JP 2007183203 A 19.07.2007 | |||
| Станок для балансировки ротора | 1985 |
|
SU1259122A1 |
| JP 2003227771 A 15.08.2003 | |||
| JP H03188341 A 16.08.1991 | |||

