ОБЛАСТЬ ТЕХНИКИ
Предмет данного изобретения относится к устройству для балансировки ротора турбомашины. Такое устройство может преимущественно использоваться в турбомашинах в любой области техники, в том числе, но без ограничения этим, при производстве энергии и в нефтегазодобывающей промышленности.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Как хорошо известно, дисбаланс является наиболее распространенной причиной возникновения чрезмерной вибрации в высокоскоростных турбомашинах. Высокая вибрация может привести к повреждению подшипника, уплотнения и ротора, к повреждению опорной системы, к повышению шума и другим нежелательным явлениям.
Более конкретно, состояние дисбаланса возникает при несовпадении оси центра масс с центральной осью вращения. Другими словами, при наличии тяжелого участка в определенном местоположении на диске ось центра масс слегка смещается от центральной оси вращения.
Для регулирования вибрации выполняют динамическую балансировку роторов. Несмотря на то что существует большое количество стандартов балансировки, отсутствует практический способ установления соотношения между вибрацией и балансировкой. В случае гибких роторов возникают дополнительные трудности.
Кроме того, если ротор изготовлен из нескольких компонентов, как рабочее колесо, установленное на валу, в процессе сборки могут произойти изменения геометрических параметров, которые могут привести к возникновению дисбаланса. Как правило, рекомендуется, чтобы компоненты каждой части ротора, в том числе вала, были сбалансированы перед сборкой ротора.
Обычно выполняют балансировку ротора и устанавливают его в турбомашину. Для этого в соответствующих местах устанавливают грузы для обеспечения совмещения центра масс с осью вращения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Недостатком является то, что после выполнения процесса балансировки при сборке конфигурация грузов не может быть изменена во время сборки и эксплуатации турбомашины. Таким образом, для добавления, удаления или изменения грузов необходимо остановить ротор, по меньшей мере частично демонтировать его и повторить большую часть процесса балансировки.
Соответственно, первый вариант выполнения изобретения относится к устройству для балансировки ротора турбомашины, содержащего приводной ротор и ведомый ротор. Такое устройство содержит основную часть, выполненную с возможностью коаксиального прикрепления к приводному ротору и ведомому ротору с расположением между ними.
На основной части расположены по меньшей мере три балансировочных инструмента. Каждый балансировочный инструмент задает соответствующее направление балансировки вдоль радиального направления основной части. Каждый балансировочный инструмент содержит груз, выполненный с возможностью перемещения в направлении балансировки. Направления балансировки, заданные балансировочным инструментом, проходят с равномерным угловым разнесением.
Второй вариант выполнения изобретения относится к турбомашине. Турбомашина содержит ротор и устройство для балансировки ротора, предложенное в первом варианте выполнения. Указанное устройство прикреплено к ротору.
Для измерения вектора дисбаланса ротора во время его вращения выполнен датчик. Для регулирования указанного устройства в зависимости от вектора дисбаланса выполнен блок управления.
Третий вариант выполнения изобретения относится к способу балансировки ротора. Способ включает использование устройства для балансировки ротора, предложенного в первом варианте выполнения. Устройство присоединяют к ротору турбомашины.
Устройство и ротор приводят во вращение вокруг общей оси. Один или более грузов устройства перемещают вдоль соответствующих им направлений балансировки для изменения центра тяжести ротора.
Другие преимущественные варианты выполнения изложены в прилагаемой формуле изобретения.
Предпочтительно варианты выполнения изобретения обеспечивают возможность динамической балансировки ротора без необходимости отключения турбомашины. Другими словами, имеется возможность выполнения балансировки, когда турбомашина находится полностью в рабочем режиме.
Другие особенности и конкретные варианты выполнения рассмотрены со ссылкой на прилагаемые чертежи, на которых:
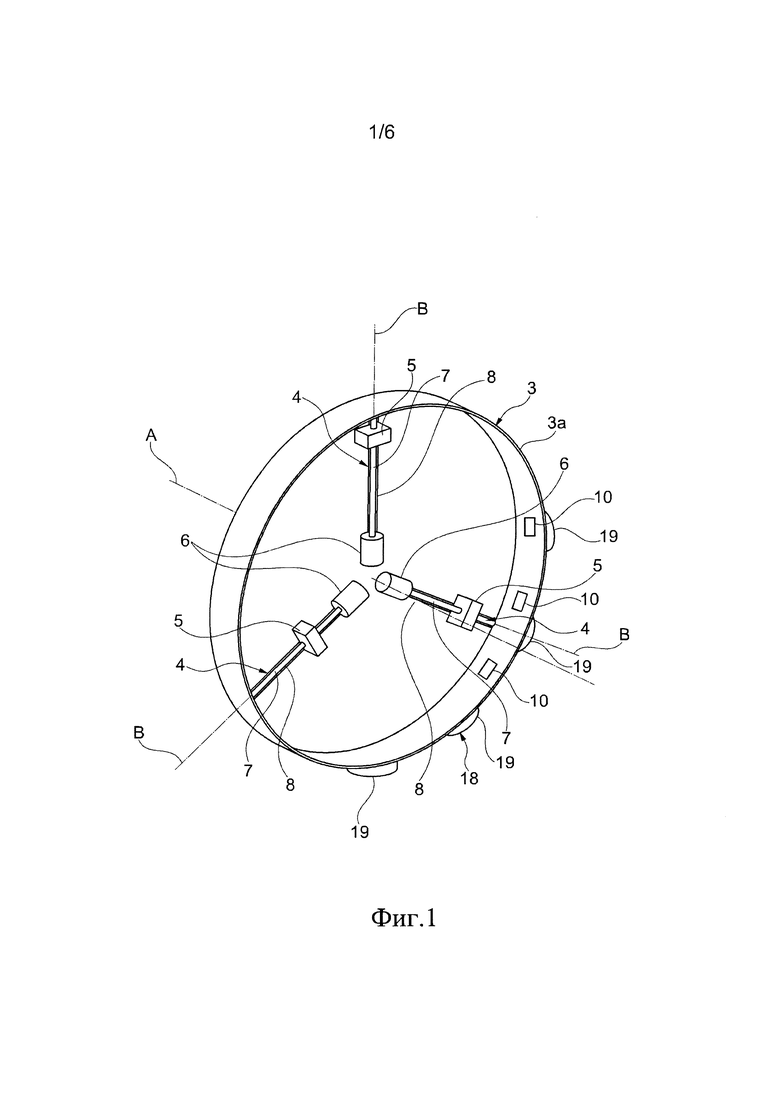
фиг. 1 изображает вид в аксонометрии устройства для балансировки ротора турбомашины в соответствии с вариантом выполнения данного изобретения,
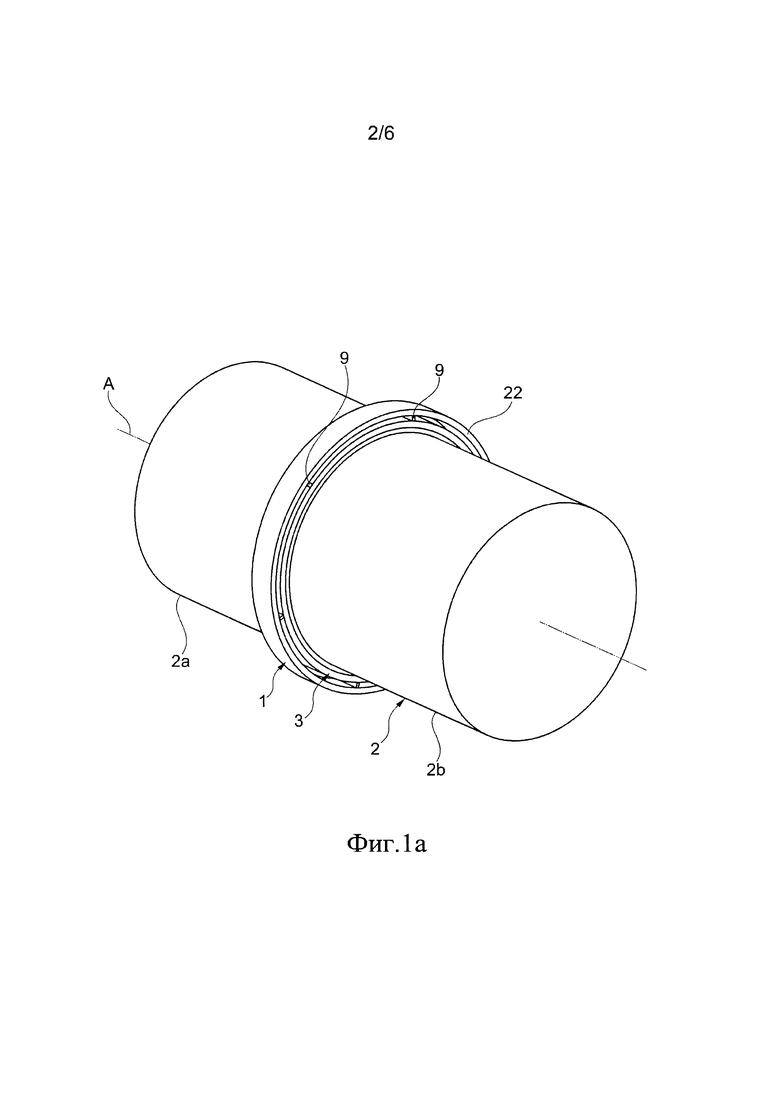
фиг. 1а изображает вид в аксонометрии устройства, показанного на фиг. 1, установленного на валу турбомашины,
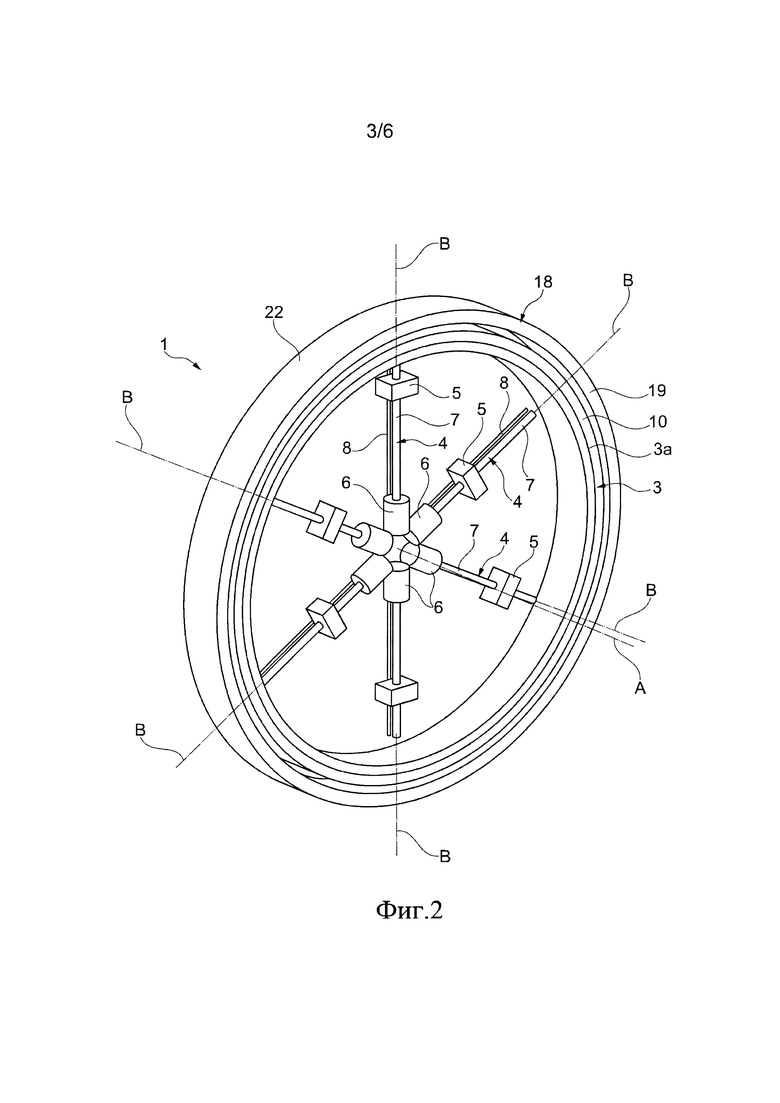
фиг. 2 изображает вид в аксонометрии устройства для балансировки ротора турбомашины в соответствии со вторым вариантом выполнения данного изобретения,
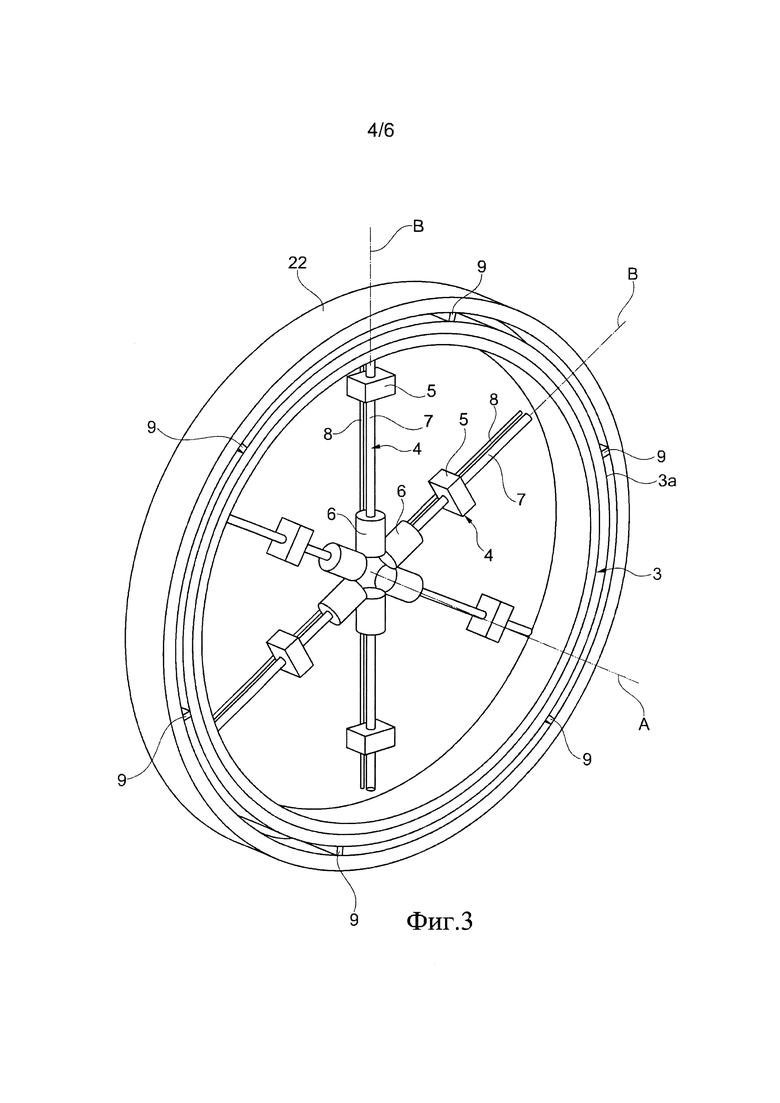
фиг. 3 изображает вид в аксонометрии устройства для балансировки ротора турбомашины в соответствии с третьим вариантом выполнения данного изобретения,
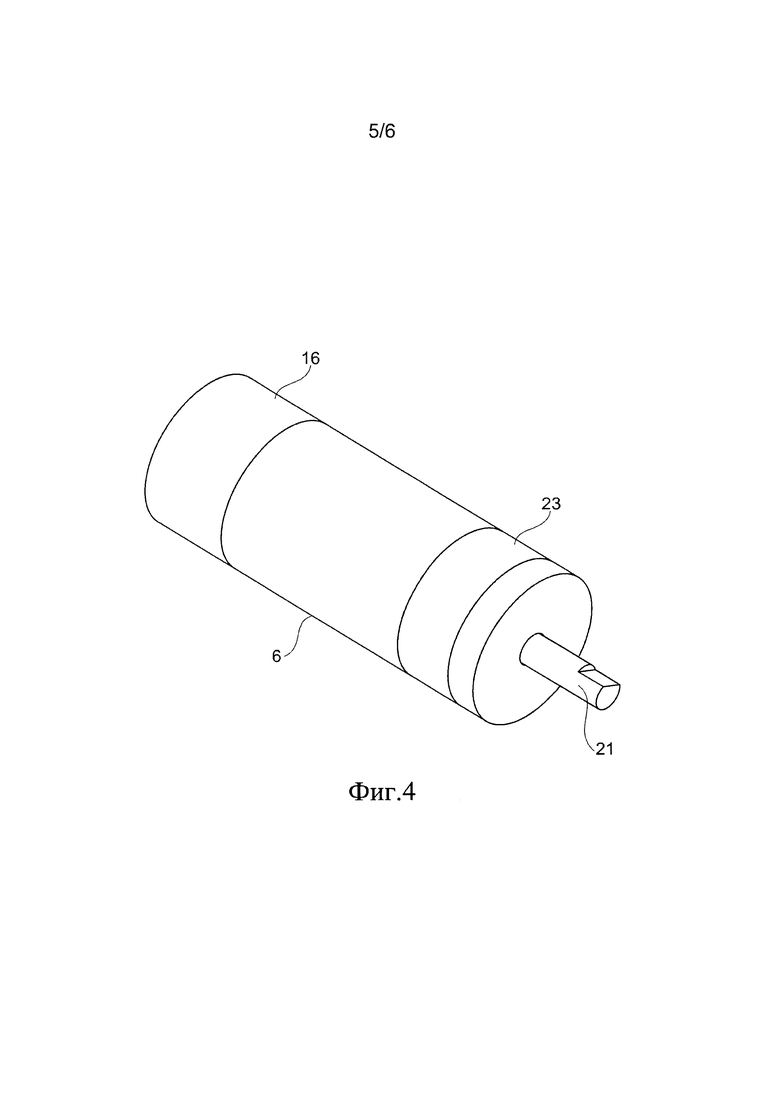
фиг. 4 изображает схематический вид в аксонометрии компонента устройства в соответствии с вариантами выполнения, показанными на фиг. 1-3, и
фиг. 5 изображает схематический вид, иллюстрирующий работу устройства, показанного на фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Нижеследующее описание иллюстративных вариантов выполнения приведено со ссылкой на прилагаемые чертежи. Одинаковые номера позиций на разных чертежах обозначают одинаковые или аналогичные элементы. Нижеприведенное подробное описание не ограничивает изобретение, объем которого определяется прилагаемой формулой изобретения.
Используемое на протяжении всего описания выражение «один вариант выполнения» или «вариант выполнения» означает, что конкретный признак, конструкция или характерная особенность, описанные в связи с вариантом выполнения, присущи по меньшей мере одному варианту выполнения рассматриваемого предмета изобретения. Таким образом, фразы «в одном варианте выполнения» или «в варианте выполнения», встречающиеся в разных местах на протяжении всего описания, не обязательно относятся к одному и тому же варианту выполнения. Кроме того, конкретные признаки, конструкции или характерные особенности могут сочетаться любым соответствующим образом в одном или более вариантах выполнения.
В соответствии с прилагаемыми чертежами номером 1 позиции обозначено устройство для балансировки ротора 2 турбомашины. В частности, ротор 2 содержит приводной ротор 2а и ведомый ротор 2b, присоединенный к приводному ротору 2а. Ротор 2 также имеет ось «А» вращения.
Фактически, устройство 1 сдержит основную часть 3, которая предпочтительно выполнена с возможностью коаксиального прикрепления к ротору 2. Основная часть 3 выполнена с возможностью присоединения к ротору 2 таким образом, что ее центральная ось совпадает с осью «А» вращения указанной турбомашины. В частности, как показано на фиг. 1а, основная часть 3 присоединена между приводом 2а и ведомым ротором 2b. Таким образом, основная часть 3 выполняет задачу по передаче энергии и/или крутящего момента от привода 2а к ведомому ротору 2b турбомашины.
Предпочтительно основная часть 3 представляет собой раму с круговой внутренней поверхностью, которая может поддерживать другой компонент устройства 1, как объяснено ниже. Рама 3 выполнена с возможностью передачи крутящего момента от ротора привода 2а к ведомому ротору 2b. Основная часть 3 на одной стороне содержит средство для ее присоединения к ротору привода 2а, а на противоположной стороне содержит другое средство для ее присоединения к ведомому ротору 2b. Таким образом, устройство 1 может передавать крутящий момент без непосредственного соединения приводного и ведомого роторов 2а, 2b. Кроме того, основная часть 2, расположенная таким образом, может быть легко демонтирована в случае технического обслуживания устройства 1 вследствие ее большей доступности. Основную часть 3 окружает статорный элемент 22, предпочтительно выполненный в виде кольца. Статорный элемент 22 предпочтительно присоединен к неподвижной части машины, такой как, например, кожух ротора или собственно корпус. Соответственно, основная часть 3 имеет кромку 3а, которая при установке обращена к статорному элементу 22. Более подробно статорный элемент 22 рассмотрен в нижеследующей части данного описания.
Фактически, устройство 1 содержит по меньшей мере три балансировочных инструмента 4, расположенных на основной части 3, а именно на внутренней поверхности рамы основной части 3. Функция этих инструментов 4 заключается в обеспечении возможности перемещения центра масс ротора 2 турбомашины в случае его смещения. Более подробно, каждый инструмент 4 задает соответствующее направление «В» балансировки вдоль радиального направления основной части 3.
Еще более подробно, каждый балансировочный инструмент 4 содержит груз 5, выполненный с возможностью перемещения вдоль направления «В» балансировки. Инструменты 4 предпочтительно расположены так, что направления «В» проходят с равномерным угловым разнесением. В более широком смысле, необходимо лишь, чтобы направления «В» балансировки были расположены так, что они могут обеспечивать перемещение центра масс устройства 1 в любую точку основной части 3, вследствие чего может быть откорректировано любое возможное смещение центра масс ротора 2. В частности, рабочий ход инструментов 4 приблизительно равен радиусу основной части 3. Груз 5 каждого инструмента 4 может перемещаться из первого положения вблизи оси «А» вращения ко второму положению вблизи кромки 3а, и наоборот. Таким образом, достигается широкий диапазон балансировки. Устройство 1 требует наличия как минимум трех балансировочных инструментов 4, соответствующее направление «В» каждого из которых проходит поперечным образом относительно направлений двух других инструментов, без фактического разнесения на равные углы. При использовании четырех балансировочных инструментов 4 наиболее эффективной схемой расположения является крестообразная схема, при которой каждое направление «В» балансировки отнесено от двух соседних направлений «В» на угол, составляющий 90°.
Следует отметить, что чем больше количество используемых инструментов 4, тем более легким может быть каждый отдельный груз 5 с возможностью достижения при этом такого же технического эффекта, а именно балансировки ротора 2.
В предпочтительных вариантах выполнения изобретения все грузы 5 балансировочных инструментов 4 являются равными. А именно, каждый инструмент 4 оказывает одинаковое воздействие на центр масс узла, содержащего устройство 1 и ротор 2. Преимущественно масса груза 5 зависит от массы ротора 2. В частности, минимальное значение массы груза 5 составляет около 0,0014% полной массы ротора 2.
Более подробно, каждый инструмент 4 содержит двигатель 6, предпочтительно установленный неподвижно относительно основной части 3 и предназначенный для перемещения груза 5 вдоль направления «В» балансировки. Двигатель 6 предпочтительно представляет собой электродвигатель. Таким образом, распределение массы устройства 1 может быть изменено путем воздействия на двигатель 6 некоторыми или всеми инструментами 4. Фактически, каждый балансировочный инструмент 4 содержит ходовой винт 7, в частности, приводимый в действие двигателем 6. Груз 5 с возможностью скольжения присоединен к ходовому винту 7. Кроме того, груз с возможностью скольжения присоединен к основной части 3 так, что груз 5 скользит относительно части 3 при вращении винта 7. Более подробно, балансировочный инструмент может содержать направляющую 8, прикрепленную к основной части 3 и обеспечивающую возможность скольжения груза 5. Каждый инструмент 4 снабжен датчиком 17 положения, так что может быть получена информация о положении груза 5 в направлении «В». Соответственно, такой датчик 17 положения может представлять собой счетчик, связанный с каждым двигателем 6. Фактически, зная количество оборотов двигателя 6 и размерные параметры соответствующего ходового винта 7, можно вычислить положение груза 5 на винте 7.
Следует отметить, что резьба 7а ходового винта 7 предпочтительно имеет трапецеидальный профиль.
Каждый узел двигателя 6, такой как показанный на фиг. 4, содержит собственно двигатель 6 и ротор 21, присоединенный к соответствующему ходовому винту 7. За двигателем 6 на стороне, противоположной винту 7, установлено блокирующее средство 16. Такое блокирующее средство 16 предназначено для блокировки двигателя 6 в случае отсутствия электричества. Фактически, блокирующее средство выполнено с возможностью воздействия на ходовой винт 7 для предотвращения его скольжения. Более подробно, блокирующее средство 16 может содержать тормоз сцепления (не показан на чертежах). Тормоз сцепления воздействует на ротор 21 двигателя 6. Поскольку вышеуказанный ходовой винт 7 присоединен к ротору 20 двигателя 6, при блокировке ротора 20 также происходит блокировка винта 7 с обеспечением тем самым сохранения местоположения соответствующего груза 5. Следует отметить, что ходовой винт 7 может быть выполнен таким образом, что, когда двигатель 6 не задействован, трение между грузом 5 и винтом 7 является достаточным для прочного удерживания груза 5 на месте, что исключает необходимость использования блокирующего средства 16. Тем не менее, в этом случае блокирующее средство 16 все равно может быть выполнено для обеспечения резервного предохранительного средства.
Для подачи мощности к двигателям 6 устройство 1 содержит скользящие контакты 9, предназначенные для электрического присоединения источника электропитания к двигателям 6. Скользящие контакты 9 могут быть расположены в любом месте на основной части 3. Однако с практической точки зрения преимущественным местоположением является кромка 3а части 3, как показано, например, на фиг. 3. В этом случае контакты 9 скользят по статорному элементу 22, в результате чего элемент 22 является частью системы питания устройства 1. Сами скользящие контакты 9 являются известными, и поэтому их дополнительное подробное описание не приводится.
Как вариант, устройство 1 содержит бесконтактный источник 18 энергии, предпочтительно индуктивного типа, для электрического присоединения источника электропитания к двигателям 6. В этом случае устройство 1 вместо вышеуказанных скользящих контактов 9 содержит индуктивные пластины 10. Соответственно, индуктивные пластины 10 установлены на основной части 3, предпочтительно на кромке 3а так, что они могут взаимодействовать с соответствующими индуктивными пластинами 19, закрепленными на статорном элементе 22.
Кроме того, один вариант выполнения изобретения относится к турбомашине, содержащей ротор 2 и устройство 1, аналогичное описанному выше. Следует отметить, что устройство 1 может быть присоединено к концу ротора 2.
Кроме того, предусмотрен по меньшей мере датчик 11 для измерения вектора «V» дисбаланса ротора 2 во время его вращения. Датчик 11 выполнен с возможностью последующей выдачи сигнала, характеризующего такой вектор «V» дисбаланса. Затем значение вектора «V» подается в блок 12 управления, выполненный с возможностью регулирования устройства 1 в зависимости от вектора «V» дисбаланса. Блок 12 может представлять собой стандартный блок управления турбины, дополнительно снабженный программным обеспечением для работы с вектором «V» дисбаланса и устройством 1. Как вариант, блок 12 управления может представлять собой дополнительное аппаратное обеспечение, предназначенное только для управления устройством 1. Также следует отметить, что практический вариант выполнения датчика 11 представляет собой набор детекторов 14 вибраций, которые передают свой выходной сигнал к блоку 12 управления. Таким образом, часть аппаратного обеспечения, с помощью которой реализован блок 12, может быть предназначена для вычисления вектора «V» дисбаланса.
Более подробно, детектор 14 вибраций может содержать один или более пьезоэлектрических датчиков 14, предназначенных для измерения вибрационных составляющих по ортогональным осям. Турбомашина содержит отметчик 15 оборотов, функция которого заключается в измерении скорости вращения ротора 2. Сигнал с отметчика 15 оборотов также подается в блок 12 управления. Соответственно, блок 15 может использовать этот сигнал для вычисления вышеуказанного вектора «V» дисбаланса во вращающейся системе координат ротора 2.
Кроме того, следует отметить, что блок 12 управления также может получать информацию о положении грузов 5 с помощью вышеуказанных датчиков 17 положения.
В данном случае блок 12 управления присоединен к балансировочным инструментам 4, в частности к двигателям 6. Следовательно, блок 12 может выдавать для каждого двигателя 6 управляющий сигнал «Sm» для перемещения соответствующих грузов 5 и, следовательно, повторной балансировки двигателей 2.
В альтернативном варианте выполнения турбомашина может быть выполнена без блока 12 управления, описанного выше. В этом случае при необходимости положение грузов 5 балансировочных инструментов 4 может быть отрегулировано оператором вручную для повторной балансировки ротора 2.
Еще один вариант выполнения изобретения относится к способу балансировки вышеописанного ротора 2. Способ включает использование устройства 1 для балансировки ротора 2, такого как описанное выше. Затем устройство 1 монтируют на роторе 2. Таким образом, при работе турбомашины устройство 1 и ротор 2 вращаются вокруг общей оси «А» вращения.
При обнаружении дисбаланса, в частности с помощью вышеописанного датчика 11, вычисляют вектор «V» дисбаланса, значение которого затем подают в блок 12 управления. После этого блок 12 обеспечивает перемещение грузов 5 вдоль направлений «В» балансировки для изменения центра тяжести ротора 2 в зависимости от вектора «V» дисбаланса.
Более подробно, блок 12 управления получает данные о текущем положении грузов 5 путем проверки датчиков 17 положения, а затем обеспечивает перемещение одного или более грузов 5 путем воздействия на соответствующий двигатель 6.

Устройство (1) для балансировки ротора (2) турбомашины содержит основную часть (3), выполненную с возможностью коаксиального прикрепления к ротору (2) и приводу, и по меньшей мере три балансировочных инструмента (4), которые расположены на основной части (3) и каждый из которых задает соответствующее направление (В) балансировки вдоль радиального направления основной части (3), при этом каждый балансировочный инструмент (4) содержит груз (5), выполненный с возможностью перемещения в направлении (В) балансировки, причем направления (В) балансировки проходят с равномерным угловым разнесением, при этом основная часть (3) выполнена с возможностью передачи крутящего момента от привода к ротору (2) турбомашины. Достигается балансировка ротора без его остановки. 3 н. и 13 з.п. ф-лы, 6 ил.
1. Устройство (1) для балансировки ротора (2) турбомашины, который содержит приводной ротор (2а) и ведомый ротор (2b), содержащее основную часть (3), выполненную с возможностью коаксиального прикрепления к приводному ротору (2а) и ведомому ротору (2b) с расположением между ними, причем на основной части (3) расположены по меньшей мере три балансировочных инструмента (4), каждый из которых задает соответствующее направление (В) балансировки вдоль радиального направления указанной основной части (3), при этом каждый балансировочный инструмент (4) содержит груз (5), выполненный с возможностью перемещения в направлении (В) балансировки, причем указанные направления (В) балансировки проходят с равномерным угловым разнесением, при этом основная часть (3) выполнена с возможностью передачи крутящего момента от приводного ротора (2а) к ведомому ротору (2b).
2. Устройство (1) по п.1, в котором грузы (5) являются одинаковыми.
3. Устройство (1) по п.1 или 2, в котором каждый балансировочный инструмент (4) содержит двигатель (6), предназначенный для перемещения груза вдоль направления (В) балансировки.
4. Устройство (1) по п.3, в котором каждый балансировочный инструмент (4) содержит ходовой винт (7), приводимый в действие указанным двигателем (6), при этом груз (5) с возможностью скольжения присоединен к ходовому винту (7) и к основной части (3) так, что ходовой винт (7) при его вращении скользит относительно основной части.
5. Устройство (1) по п.4, в котором резьба (7а) ходового винта (7) имеет трапецеидальный профиль.
6. Устройство (1) по любому из пп.3-5, в котором двигатель (6) представляет собой электродвигатель.
7. Устройство (1) по п.6, содержащее скользящие контакты (9) для электрического присоединения источника электропитания к двигателям (6).
8. Устройство (1) по п.6, содержащее средство (10) бесконтактной подачи энергии, предпочтительно индуктивного типа, для электрического присоединения источника электропитания к двигателям (6).
9. Устройство (1) по любому из пп.3-8, в котором двигатель (6) содержит блокирующее средство (16), предназначенное для блокировки двигателя (6) в случае отсутствия электричества.
10. Устройство (1) по любому из пп.1-9, в котором масса груза (5) зависит от массы ротора (2).
11. Устройство (1) по любому из пп.1-10, в котором груз (5) каждого балансировочного инструмента (4) выполнен с возможностью перемещения в радиальном направлении от положения вблизи оси (А) вращения устройства (1) и к указанному положению вдоль направления (В) балансировки.
12. Турбомашина, содержащая
ротор (2),
устройство (1) для балансировки ротора (2), выполненное по любому из пп.1-11 и присоединенное к указанному ротору (2),
датчик (11), предназначенный для измерения вектора «V» дисбаланса ротора (2) во время его вращения,
блок (12) управления, предназначенный для регулирования устройства (1) в зависимости от вектора «V» дисбаланса.
13. Турбомашина по п.12, в которой ротор (2) содержит приводной ротор (2а) и ведомый ротор (2b), при этом указанное устройство (1) для балансировки ротора (2) присоединено между приводным и ведомым роторами (2а, 2b).
14. Турбомашина по п.12 или 13, в которой датчик (11) содержит набор детекторов вибраций, предпочтительно один или более пьезоэлектрических датчиков, предназначенных для измерения вибрационных составляющих по ортогональным осям, при этом турбомашина содержит отметчик (15) оборотов.
15. Способ балансировки ротора (2) турбомашины, содержащего приводной ротор (2а) и ведомый ротор (2b), включающий
присоединение устройства (1) для балансировки ротора (2), которое выполнено по любому из пп.1-11, к ротору (2) турбомашины путем коаксиального прикрепления основной части указанного устройства (1) к приводному ротору (2а) и к ведомому ротору (2b) с расположением между ними,
обеспечение вращения устройства (1) и ротора (2) вокруг общей оси (А),
перемещение одного или более грузов (5) вдоль указанных направлений (В) балансировки для изменения центра тяжести ротора (2).
16. Способ по п.15, в котором измеряют вектор (V) дисбаланса ротора и регулируют положения грузов (5) в зависимости от указанного вектора (V) дисбаланса.
| WO 9004768 A1, 03.05.1990 | |||
| US 4530239 A, 23.07.1985 | |||
| FR 3005095 A1, 31.10 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| US 2006005623 A1, 12.01.2006 | |||
| Устройство для балансировки ротора | 1984 |
|
SU1413466A1 |

