Настоящее изобретение касается рабочего колеса типа колеса Фрэнсиса для гидравлической машины, через которое должен проходить принудительный поток воды. Если машина является турбиной, такой поток приводит во вращение рабочее колесо, а если машина является насосом, то такой поток возникает в результате этого вращения. Кроме того, настоящее изобретение касается гидравлической машины, оборудованной таким колесом. С другой стороны, изобретение относится также к установке преобразования энергии, содержащей такую гидравлическую машину.
Обычно классическая установка преобразования гидравлической энергии в электрическую энергию содержит гидравлическую машину, которая работает в режиме турбины и через которую проходит принудительный поток воды, расходом которого управляет распределитель. Рабочее колесо турбины вращает вал, соединенный с генератором переменного тока. Для подключения генератора к электрической сети скорость вращения турбины должна быть стабильной, чтобы частота электрического сигнала на выходе генератора была равна частоте электрической сети. Частота электрической сети равна 50 Гц в Европе, но это значение может быть равно 60 Гц на других территориях, например в США. Пока машина не подключена к сети, крутящий момент рабочего колеса является нулевым. Во время переходных рабочих фаз колебания давления потока приводят к нестабильности, поэтому скорость вращения рабочего колеса турбины не стабилизирована, и генератор не может быть подключен к электрической сети. В частности, во время запуска турбины распределитель открывается постепенно, что вызывает колебания скорости вращения рабочего колеса турбины. Затем при достижении необходимой степени открывания распределителя генератор соединяется с электрической сетью, как только скорость вращения рабочего колеса оказывается стабильной и достигает скорости синхронизации.
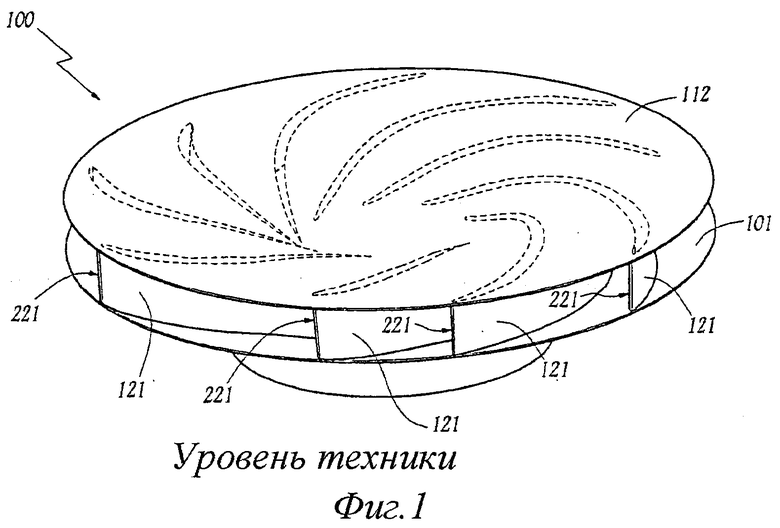
На фиг.1 показано известное рабочее колесо 100 типа колеса Фрэнсиса, которое содержит венец 101 и потолок 112, находящийся напротив венца 101. Кроме того, колесо 100 содержит девять лопаток 121, неподвижно соединенных с венцом 101 и с полотком 112 и расположенных между венцом 101 и потолком 112. Каждая лопатка 121 имеет прямолинейную переднюю кромку 221, через которую в первую очередь проходит принудительный водяной поток, если колесо принадлежит к гидравлической машине, работающей в режиме турбины.
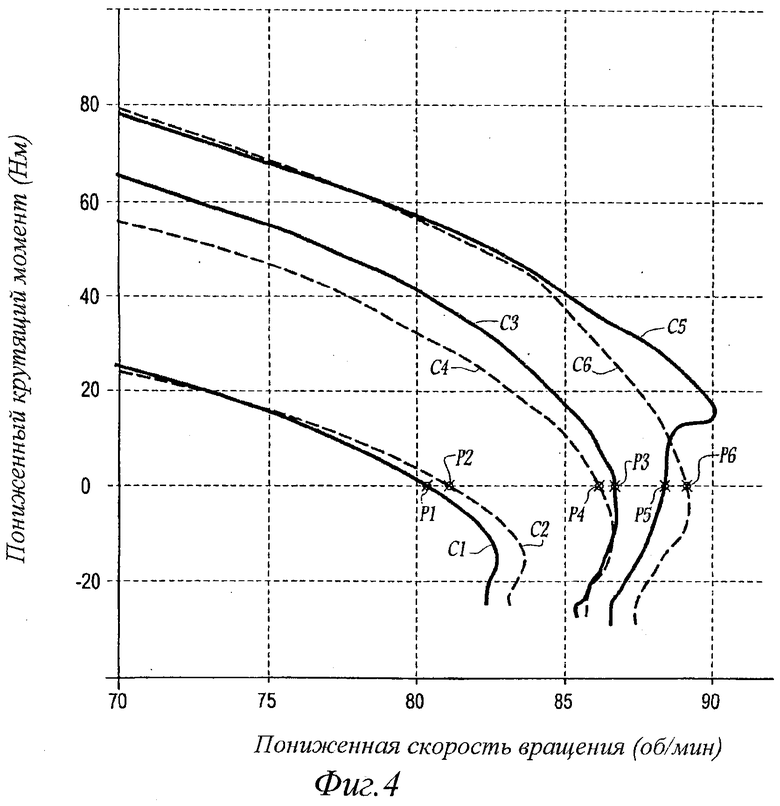
На представленном на фиг.4 графике на оси абсцисс показана величина, называемая «пониженной скоростью вращения», выраженная в об/мин и пропорциональная отношению скорости вращения рабочего колеса турбины к квадратному корню высоты падения, а на оси ординат - величина, называемая «пониженным крутящим моментом», выраженная в Нм и пропорциональная отношению крутящего момента, создаваемого колесом, к высоте падения. Каждая кривая С1-С6 графика показывает пониженный крутящий момент рабочего колеса в зависимости от его пониженной скорости вращения при постоянной степени открывания распределителя, расположенного на входе этого колеса. Кривые, показанные сплошными линиями С1, С3 и С5, соответствуют работе турбины, оборудованной известным рабочим колесом 100, а кривые, показанные пунктирными линиями С2, С4 и С6, соответствуют работе турбины, оборудованной рабочим колесом в соответствии с изобретением.
Малые значения пониженной скорости вращения турбины в левой части графика соответствуют большим высотам падения, тогда как большие значения пониженной скорости вращения турбины в правой части графика соответствуют малым высотам падения. Точки Р1-Р6 находятся соответственно на пересечении между кривыми С1-С6 и горизонтальной прямой, соответствующей нулевому пониженному крутящему моменту. Таким образом, точки Р1-Р6 показывают пониженную скорость вращения рабочего колеса, позволяющую подключить генератор к электрической сети. Известно, что на таком графике рабочие точки, при которых наклон кривой является отрицательным, соответствуют устойчивой работе турбины, то есть стабильной скорости вращения рабочего колеса. В то же время рабочие точки, при которых наклон кривой является положительным, соответствуют нестабильной скорости вращения рабочего колеса, которая не позволяет подключить генератор к сети. Обычно стараются добиться работы турбины при наиболее низких высотах падения, сохраняя при этом отрицательный наклон.
В случае известного колеса 100 отмечается, что для точки Р1, которая соответствует первому открыванию распределителя при относительно большой высоте падения, наклон кривой С1 является отрицательным, и скорость вращения является стабильной. Что касается точки Р3, которая соответствует меньшей высоте падения при втором открывании распределителя, кривая С3 является более или менее вертикальной, то есть скорость вращения известного рабочего колеса 100 не является достаточно стабильной. Наконец, кривая С5 имеет S-образную форму, и ее наклон в точке Р5 является положительным, что соответствует нестабильной скорости вращения рабочего колеса 100.
Таким образом, известное рабочее колесо 100 не может самостоятельно стабилизировать свою скорость вращения при относительно малых высотах падения.
Чтобы стабилизировать скорость вращения известного рабочего колеса, как известно, используют турбину с дополнительным устройством соединения, которое предназначено для десинхронизации направляющих лопаток. Эти направляющие лопатки распределены вокруг рабочего колеса и выполнены с возможностью десинхронизации, то есть их можно ориентировать по-разному относительно друг друга для изменения расхода потока вокруг колеса с целью получения кривой с отрицательным наклоном на графике, представленном на фиг.4. Однако десинхронизация направляющих лопаток требует, с одной стороны, установки сервомоторов управления предназначенными для десинхронизации направляющими лопатками и, с другой стороны, применения соответствующей программы контроля и управления.
В документе US-2005/013691 раскрыто рабочее колесо типа колеса Фрэнсиса, содержащее потолок и обод, между которыми расположены лопатки, имеющие изогнутую переднюю кромку, выпуклость которой является окружной. Таким образом, каждая из передних кромок имеет промежуточную точку, находящуюся во впадине криволинейной формы передней кромки. Это рабочее колесо имеет такую геометрию, при которой радиус первой точки сопряжения между передней кромкой и потолком меньше радиуса промежуточной точки. Эта геометрия не позволяет улучшить стабильность скорости вращения рабочего колеса во время фаз подключения к электрической сети.
Задачей изобретения является устранение вышеуказанных недостатков и разработка рабочего колеса турбины, специальная геометрия которого позволяет стабилизировать скорость вращения колеса во время переходных фаз запуска при относительно малых высотах падения.
Задача решается рабочим колесом согласно изобретению типа колеса Фрэнсиса для гидравлической машины, через которое должен проходить принудительный поток воды, содержащим:
- венец с симметрией вращения вокруг оси вращения колеса,
- потолок с симметрией вращения вокруг оси вращения, расположенный напротив венца,
- множество изогнутых лопаток, неподвижно соединенных с венцом и с потолком и имеющих, каждая, центральную кромку вблизи оси вращения и периферическую кромку, противоположную центральной кромке, которая проходит между венцом и потолком и через которую в первую очередь проходит поток, когда гидравлическая машина работает в режиме турбины. Иначе говоря, когда гидравлическая машина работает в режиме турбины, поток проходит от периферической кромки к центральной кромке.
Периферическая кромка по меньшей мере одной лопатки является изогнутой и ее вогнутость обращена наружу рабочего колеса. Первое расстояние, измеренное между любой точкой периферической кромки и прямой, проходящей, с одной стороны, через первую точку сопряжения между периферической кромкой и венцом и, с другой стороны, через вторую точку сопряжения между периферической кромкой и потолком, является максимальным на уровне промежуточной точки периферической кромки. Радиус промежуточной точки является строго меньшим радиуса первой точки сопряжения. Радиус промежуточной точки является строго меньшим радиуса второй точки сопряжения.
Благодаря форме в виде впадины периферической кромки лопаток, которая соответствует передней кромке, когда гидравлическая машина работает в режиме турбины, турбина может работать при меньших высотах падения с сохранением отрицательного наклона в рабочих точках, что позволяет подключить генератор к электрической сети. Это позволяет получить стабильную скорость вращения и быстро соединить турбину с электрической сетью, не добавляя дополнительного устройства соединения, в частности, при малых высотах падения.
Согласно предпочтительным, но не ограничительным вариантам изобретения, такое рабочее колесо может иметь один или несколько из следующих отличительных признаков, взятых в любых технических возможных комбинациях:
- Промежуточная точка является наиболее удаленной от прямой.
- Ортогональная проекция промежуточной точки на прямую находится в зоне, которая проходит вдоль прямой и центр которой находится в середине прямой. Высота зоны меньше 80% высоты каждой лопатки, измеренной между первой точкой сопряжения и второй точкой сопряжения, предпочтительно меньше 10%.
- Периферическая кромка лопаток выполнена в виде участка окружности, эллипса, параболы и даже любой кривой.
- Первое отношение, в котором:
- знаменателем является высота лопатки, измеренная между первой точкой сопряжения и второй точкой сопряжения,
- числителем является максимальное расстояние между прямой и периферической кромкой,
составляет от 0% до 200%, предпочтительно от 30% до 80%.
- Промежуточная точка периферической кромки находится на половине расстояния между точками сопряжения.
- В первой плоскости, параллельной оси вращения и перпендикулярной ко второй плоскости, которая проходит через пересечение между потолком и средней поверхностью лопатки, находящейся между наружной стороной и внутренней стороной лопатки, и которая продолжает эту среднюю поверхность, наружная сторона является выпуклой, а внутренняя сторона является вогнутой.
- В первой плоскости наружная сторона и внутренняя сторона имеют форму участка окружности, эллипса, параболы и даже любой кривой.
- Второе отношение, в котором:
- знаменателем является высота лопатки, измеренная между первой точкой сопряжения и второй точкой сопряжения,
- числителем является максимальное расстояние, измеренное параллельно первой плоскости, между прямой и периферической кромкой,
составляет от 0% до 200%, предпочтительно от 10% до 40%.
- В первой плоскости промежуточная точка периферической кромки находится на половине расстояния между точками сопряжения.
- В первой плоскости периферическая кромка является криволинейной с вогнутостью, обращенной в том же направлении, что и направление вращения колеса в режиме турбины.
- Второе расстояние, измеренное параллельно первой плоскости, между любой точкой периферической кромки и прямой, является максимальным в промежуточной точке.
Объектом изобретения является также гидравлическая машина, оборудованная таким рабочим колесом.
Предпочтительно, когда машина работает в режиме турбины, поток в первую очередь попадает на наружную сторону лопаток.
Наконец, объектом изобретения является установка преобразования энергии, содержащая такую гидравлическую машину.
Изобретение и его преимущества будут более очевидны из нижеследующего описания рабочего колеса, входящего в состав гидравлической машины, принадлежащей к установке преобразования энергии, со ссылками на прилагаемые чертежи, на которых:
Фиг.1 изображает вид в изометрии известного рабочего колеса гидравлической машины.
Фиг.2 - вид, аналогичный фиг.1, рабочего колеса гидравлической машины в соответствии с изобретением.
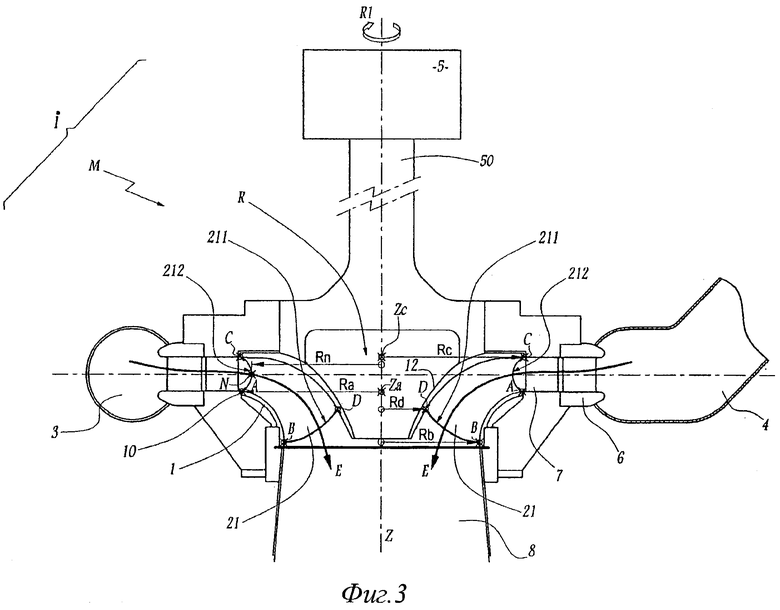
Фиг.3 - вид в разрезе установки преобразования энергии, оборудованной гидравлической машиной, содержащей рабочее колесо, показанное на фиг.2.
Фиг.4 - график, показывающий шесть кривых, из которых три сплошные кривые показывают скорость вращения рабочего колеса, представленного на фиг.1, в зависимости от его крутящего момента, и три пунктирные кривые показывают скорость вращения рабочего колеса, представленного на фиг.2, в зависимости от его крутящего момента.
Фиг.5 - частичный вид в изометрии детали V фиг.2 под другим углом и в увеличенном виде.
Фиг.6 - вид лопатки, принадлежащей к рабочему колесу, показанному на фиг.2, в направлении стрелки F6 на фиг.5.
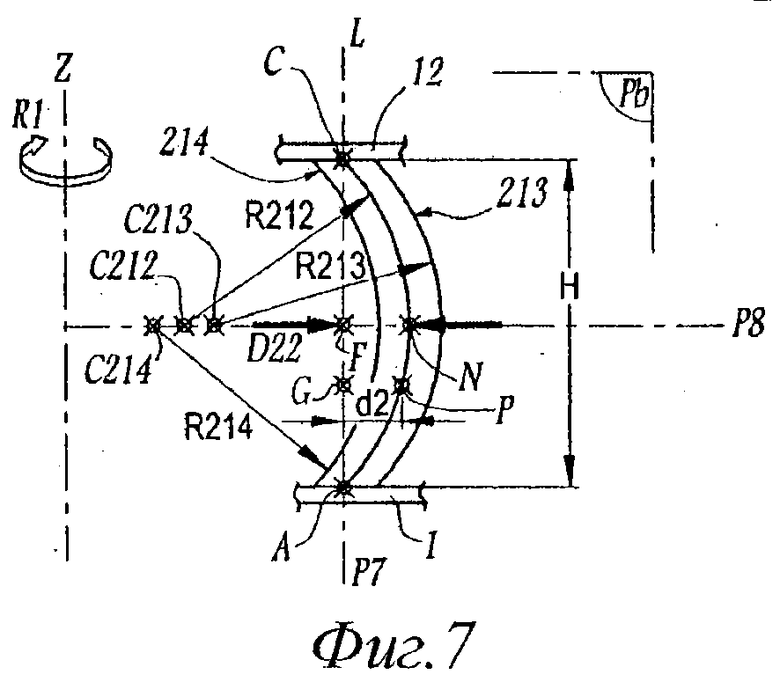
Фиг.7 - увеличенный вид лопатки, показанной на фиг.6, в направлении стрелки F7 на фиг.5.
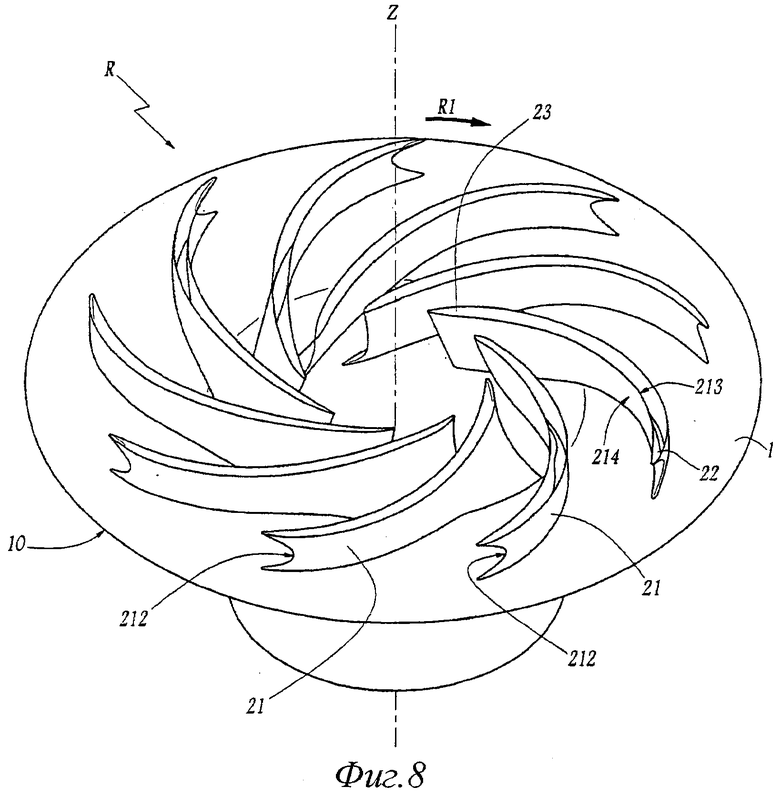
Фиг.8 - вид в изометрии рабочего колеса, показанного на фиг.2.
Фиг.9 - вид сверху рабочего колеса, показанного на фиг.2, в разрезе по плоскости Р8 на фиг.7, при этом потолок рабочего колеса не показан.
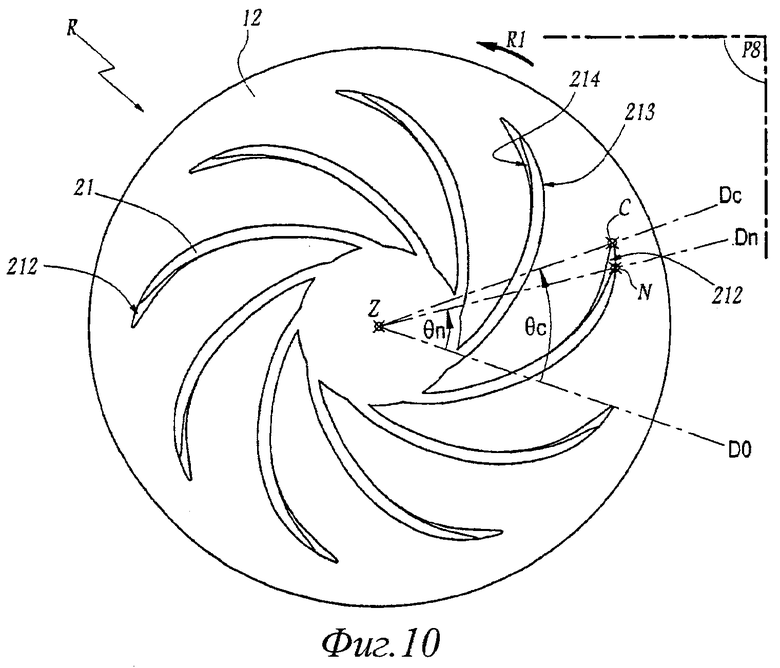
Фиг.10 - вид сверху рабочего колеса, показанного на фиг.2, в разрезе по плоскости Р8 на фиг.7, при этом обод рабочего колеса не показан.
Установка I, показанная на фиг.3, содержит реверсивную гидравлическую машину М, которая является турбиной-насосом типа турбины Фрэнсиса, колесо R которой питается водой из спиральной камеры 3 и с которой сообщается канал 4 принудительного потока, когда машина М работает в режиме турбины. Во время работы колесо 200 вращается вокруг вертикальной оси вращения Z. Когда машина М работает в режиме турбины, колесо 200 вращается в направлении вращения R1 вокруг оси Z, которое соответствует направлению часовой стрелки, если на колесо R смотреть сверху. Для производства электричества в режиме турбины машину М соединяют с генератором 5 через вал 50, вращающийся вокруг оси Z. Между камерой 3 и колесом R расположены статические передние направляющие лопатки 6 и поворотные направляющие лопатки 7, предназначенные для направления водяного потока Е, поступающего из канала 4 и предназначенного для прохождения через колесо R, в направлении выпускного канала 8. Направляющие лопатки 7 выполняют также функцию распределителя, так как они позволяют регулировать расход потока Е.
На фиг.2 показано рабочее колесо R в соответствии с изобретением, которое содержит венец 1 и потолок 12, находящийся напротив венца 1. Венец 1 и потолок 12 имеют симметрию вращения вокруг оси Z. Венец 1 и потолок 12 имеют наружный периферический край, соответственно 10 и 20, центрованный по оси Z. Поверхности венца 1 и потолка 12 имеют искривленные формы, образованные вращением сегмента кривой вокруг и на расстоянии от оси Z.
Кроме того, рабочее колесо R содержит девять лопаток 21, неподвижно соединенных с венцом 1 и с потолком 12 и расположенных между венцом 1 и потолком 12 вокруг оси Z. На фиг.2 зоны соединения между лопатками 21, с одной стороны, и потолком 2, с другой стороны, показаны пунктирными линиями.
В данном случае объект называют «центральным», если он находится вблизи оси Z, в отличие от прилагательного «периферический», которое обозначает объект, находящийся на удалении от оси Z.
Каждая лопатка 21 имеет изогнутую форму между периферическим концом 22 лопатки 21 и центральным концом 23 лопатки 21. Эта изогнутая форма образует основную кривизну лопатки 21 в основном в виде участка спирали. Каждая лопатка 21 имеет периферическую кромку 212, находящуюся на периферии венца 1, и центральную кромку 211, обращенную к оси Z. Каждая лопатка 21 ограничена наружной стороной 213 снаружи основной кривизны лопатки 21 и внутренней стороной 214 внутри основной кривизны лопатки 21. Стороны 213 и 214 соединяются на уровне центральной кромки 211 и периферической кромки 212.
Когда машина М работает в режиме турбины, поток Е в первую очередь попадает на наружную сторону 213 лопаток 21. Как показано на фиг.9 и 10, в плоскости, перпендикулярной к оси вращения Z, наружная сторона 213 каждой лопатки 21 является выпуклой, а внутренняя сторона 214 - вогнутой.
Когда машина М работает в режиме турбины, периферическая кромка 212 каждой лопатки 21 образует переднюю кромку, а центральная кромка 211 образует заднюю кромку. Передняя кромка первой встречает поток Е, когда машина М работает в режиме турбины. Иначе говоря, текучая среда протекает от периферической кромки к центральной кромке. В нижеследующем описании, представленном для режима турбины, использованы эти выражения «передняя кромка» и «задняя кромка»; его можно транспонировать на случай, когда колесо работает в режиме насоса, поменяв местами эти выражения.
Позицией А обозначена точка сопряжения венца 1 с передней кромкой 212 каждой лопатки 21. Буквой В обозначена точка сопряжения венца 1 с задней кромкой 211 каждой лопатки 21. Аналогично, С обозначает точку сопряжения потолка 12 с передней кромкой 212 каждой лопатки 21, и D обозначает точку сопряжения потолка 12 с задней кромкой 211 каждой лопатки 21.
Ra, Rb, Rc или Rd обозначают соответственно радиус точки А, В, С или D. Каждый радиус Ra, Rb, Rc и Rd является расстоянием, измеренным в радиальном направлении между осью Z и точкой А, В, С или D.
Радиус Rd меньше радиуса Rb. Радиусы Ra и Rc равны между собой и строго превышают радиусы Rb и Rd. В частности, радиус Rc строго превышает радиус Rb, что позволяет машине М работать в режиме насоса с достаточной эффективностью. Когда машина М работает в режиме турбины, давление потока Е на уровне точки С больше, чем на уровне точки В.
На фиг.5-7 более детально показан периферический конец 22 одной из лопаток, при этом подразумевается, что другие лопатки 21 являются аналогичными.
S обозначает среднюю поверхность каждой лопатки 21, проходящую между наружной 213 и внутренней 214 сторонами лопатки 21 на одинаковом расстоянии от этих сторон. На уровне периферического конца 22 лопатки 21 средняя поверхность S совпадает с передней кромкой 212. Поверхность S показана на фиг.5 в виде ее следа на уровне потолка 12.
L обозначает прямую, проходящую через точки А и С передней кромки 212. Прямая L параллельна оси Z вращения рабочего колеса R. Ра обозначает плоскость, которая проходит через прямую L и которая находится в продолжении средней поверхности S на уровне ее пересечения с потолком 12. Плоскость Ра проходит через левую половину касательной Т от периферического конца S1 следа средней поверхности S на уровне потолка 12.
На фиг.6 представлен вид в направлении стрелки F6, перпендикулярной к плоскости Ра и направленной к наружной стороне 213 лопатки 21.
Передняя кромка 212 является криволинейной и не имеет прерывистости. Иначе говоря, впадина передней кромки 212 выполнена в направлении задней кромки 211, и ее форма не имеет переломов. Таким образом, вогнутость передней кромки 212 обращена наружу лопатки 21 и колеса R, в частности, в плоскости Ра или в плоскости, параллельной сторонам 213 или 214, вблизи передней кромки 212.
В плоскости Ра изогнутая форма передней кромки 212 в виде впадины образована участком окружности, как показано на фиг.6. Позиция С21 обозначает центр передней кромки 212 в плоскости Ра, а позиция R21 обозначает ее радиус.
Передняя кромка 212 является симметричной относительно плоскости Р8, перпендикулярной к прямой L, которая проходит через промежуточную точку N передней кромки 212. Точка N является точкой передней кромки 212, наиболее удаленной от прямой L.
D21 обозначает расстояние между точкой N и прямой L, и Н обозначает высоту передней кромки 212, измеренную между точками А и С вдоль прямой L. Расстояние D21 является максимальным расстоянием между передней кромкой 212 и прямой L.
В представленном примере расстояние D21 измерено перпендикулярно к прямой L. Обозначим d1 расстояние между прямой L и любой точкой Р передней кромки 212, измеренное перпендикулярно к прямой L. Обозначим буквой G ортогональную проекцию точки Р на прямую L. Расстояние d1 измерено между точками Р и G. Расстояние d1 является проекцией вектора 
Таким образом, вдоль передней кромки 212 и между точками А и С расстояние d1, выраженное как функция расстояния L1 между точкой А и точкой G, имеет только один максимум и не имеет точки перегиба.
Производная расстояния d1 относительно расстояния L1 является положительной между точками А и N, обнуляется в точке N и является отрицательной между точками N и С. Вторая производная расстояния d1 относительно расстояния L1 является отрицательной между точками А и С.
Отношение, числителем которого является расстояние D21, а знаменателем - высота Н, находится в пределах от 0% до 200%, предпочтительно от 30% до 80%.
F обозначает точку пересечения между прямой L и плоскостью Р8. Расстояние между точкой А и точкой F равно расстоянию между точкой F и точкой С. Иначе говоря, плоскость Р8 находится на половине расстояния между точками А и С вдоль прямой L.
Rn обозначает радиус точки N, то есть расстояние, измеренное радиально, между осью Z и точкой N. Расстояние Rn строго меньше расстояния Ra и расстояния Rc.
На фиг.7 показан наружный конец 22 лопатки 21, показанной на фиг.5, в направлении стрелки F7, содержащейся в плоскости Ра и перпендикулярной к прямой L. Таким образом, на фиг.7 представлен вид в плоскости Pb, перпендикулярной к плоскости Ра.
Как показано на фиг.7, тело лопатки 21 выгнуто наружу колеса R. Иначе говоря, в плоскости Pb наружная сторона 213 является выпуклой, а внутренняя сторона 214 - вогнутой. Эта вторичная кривизна лопаток 21 является сплошной и не имеет переломов.
В частности, в плоскости Pb наружная поверхность 213, внутренняя поверхность 214 и средняя поверхность S, которая совпадает с передней кромкой 212, образованы, каждая, участком окружности. С212 обозначает центр окружности, которая определяет форму передней кромки 212, а R212 обозначает ее радиус. Точно так же, позициями С213 и С214 обозначен центр окружностей, которые определяют форму наружной поверхности 213 и внутренней поверхности 214, а позициями R213 и R214 обозначены их соответствующие радиусы.
Учитывая эту вторичную кривизну, прямая, которая проходит через точки F и N и вдоль которой измерено расстояние D21, имеет наклон относительно плоскости Ра фиг.6.
D22 обозначает расстояние, измеренное параллельно плоскости Pb, между точкой F и точкой N. Расстояние D22 является максимальным расстоянием в плоскости, параллельной плоскости Pb, между прямой L и передней кромкой 212. Расстояние D22 является проекцией вектора 
Второе отношение, числителем которого является расстояние D22, а знаменателем - высота Н лопатки 21, составляет от 0% до 200%, предпочтительно от 10% до 40%.
Кроме того, в плоскости Pb наружная сторона 213 и внутренняя сторона 214 являются симметричными относительно плоскости Р8. Иначе говоря, в плоскости Pb точка N передней кромки 212 находится на половине высоты между точками сопряжения А и С.
В представленном примере расстояние D22 измерено перпендикулярно к прямой L. Обозначим d2 расстояние между прямой L и любой точкой Р передней кромки 212, измеренное параллельно плоскости Pb и перпендикулярно к прямой L. Расстояние d2 является проекцией вектора 
Расстояние d2 является нулевым в точке А и увеличивается между точками А и N. В точке N расстояние d2 является максимальным и равно расстоянию D22. Между точками N и С расстояние d2 уменьшается. В точке С расстояние d2 является нулевым. Таким образом, вдоль передней кромки 212 и между точками А и С расстояние d2, выраженное как функция расстояния L1, имеет только один максимум и не имеет точки перегиба. Производная расстояния d2 относительно расстояния L1 является положительной между точками А и N, обнуляется в точке N и является отрицательной между точками N и С. Вторая производная расстояния d2 относительно расстояния L1 является отрицательной между точками А и С.
Вогнутость вторичной кривизны лопаток 21 обращена в направлении вращения R1 колеса R, когда машина М работает в режиме турбины. Иначе говоря, в сечении, перпендикулярном к следу средней поверхности S на потолке 12, и как показано на фиг.7, наружная сторона 213 лопаток 21 является выпуклой и обращена противоположно направлению вращения R1, а внутренняя сторона 214 является вогнутой и обращена в том же направлении, что и направление вращения R1.
Позициями Rp, θp и Zp обозначены цилиндрические координаты любой точки Р каждой передней кромки 212.
Rp является радиусом точки Р. Обозначим Pz ортогональную проекцию точки Р на ось Z. Радиус Rp измерен между точками Pz и Р в радиальном направлении. В точке А радиус Rp равен радиусу Ra. Радиус Rp уменьшается между точками А и N. В точке N радиус Rp является минимальным и равен радиусу Rn. Радиус Rp увеличивается между точками N и С. В точке С радиус Rp равен радиусу Rc.
Zp является высотой точки Р. Az обозначает ортогональную проекцию точки А на ось Z. Высота Zp точки Р является расстоянием между точкой Az и точкой Zp.
Cz обозначает ортогональную проекцию точки С на ось Z. Вдоль передней кромки 212 и между точками А и С радиус Rp, выражаемый как функция высоты Zp, имеет только один минимум и не имеет точки перегиба. Производная радиуса Rp относительно высоты Zp является положительной между точками А и N, равна нулю в точке N и является отрицательной между точками N и С. Вторая производная радиуса Rp относительно расстояния Zp является положительной между точками А и С.
θp является углом точки Р в системе цилиндрических координат. Угол θp имеет положительное направление, идентичное направлению вращения R1 колеса R, когда машина М работает в режиме турбины. Обозначим Da радиальную прямую, проходящую через точку А и ось Z. Для каждой лопатки 21 рассматривают радиальную прямую D0, проходящую через ось Z, при которой положительный угол θ0, измеренный от прямой D0 до прямой Da, равен 45°.
В системе цилиндрических координат угол θp точки Р определяют от прямой D0 до прямой Dp, проходящей через точки Pz и Р.
Как показано на фиг.9, угол θp является максимальным в точке А и равен углу θа. Угол θp уменьшается между точками А и N. В точке N угол θp является минимальным и равен углу θn. Как показано на фиг.10, между точками N и С угол θp увеличивается. В точке С угол θp является максимальным и равен углу θс.
Таким образом, вдоль передней кромки 212 и между точками А и С угол θp, выраженный как функция высоты Zp, имеет только один минимум и не имеет точки перегиба.
Производная угла θp относительно высоты Zp является отрицательной между точками А и N, равна нулю в точке N и является положительной между точками N и С. Вторая производная угла θp относительно высоты Zp является положительной между точками А и С.
Во время переходных фаз работы установки I, например во время запуска установки I, генератор 5 не подключен к электрической сети, так как скорость вращения рабочего колеса R не является стабильной и не позволяет генератору 5 выдавать электрический сигнал, частота которого равна частоте электрической сети. Например, в Европе частота электрической сети равна 50 Гц. Благодаря форме в виде впадины передней кромки 212 лопаток 21 поток Е создает мало и даже не создает совсем завихрений и нестабильностей, что позволяет скорости вращения колеса R стабилизироваться для подключения генератора 5 к сети.
Стабильность скорости вращения рабочего колеса R в соответствии с изобретением можно наблюдать на графике на фиг.4. При относительно большой высоте падения наклон кривой С1 в точке Р1 является отрицательным, как и наклон кривой С2 в точке Р2, то есть при одинаковой высоте падения работа является устойчивой как для известного колеса 100, так и для колеса R в соответствии с изобретением. На уровне точки Р4 наклон кривой С4 является отрицательным, тогда как кривая С3 в точке Р3 является вертикальной, то есть скорость вращения заявленного рабочего колеса является более стабильной, чем скорость известного колеса. Наконец, кривая С6 имеет слабо отрицательный наклон в точке Р6, тогда как наклон кривой С5 в точке Р5 является положительным, что означает, что скорость вращения заявленного колеса R является более стабильной, чем скорость вращения известного колеса 100 при относительно малой высоте падения.
Выгнутая наружу форма тела лопаток 21 позволяет усилить вогнутость передних кромок 212 и получить относительно большое расстояние D21 без чрезмерного увеличения впадины передней кромки 212 вдоль средней поверхности S в направлении задней кромки 211. Это позволяет гидравлической машине М, работающей в режиме насоса, не слишком терять эффективность.
Нет необходимости в каком-либо дополнительном устройстве для обеспечения удовлетворительной скорости вращения, поскольку сама по себе форма лопаток 21 позволяет подключать генератор 5 к сети.
В варианте, прямая L не является параллельной оси вращения Z рабочего колеса R. Например, точка С может быть смещена к задней кромке 211 относительно точки А.
В варианте, вогнутая форма передних кромок 212 образована участком эллипса или параболы и даже любой кривой.
В другом варианте, изогнутая наружу форма передней кромки 212, наружной стороны 213 и внутренней стороны 214 лопатки 21 образована участком эллипса или параболы и даже любой кривой.
В варианте, только некоторые лопатки 21 имеют вогнутую переднюю кромку.
В варианте, точка N не находится точно на половине высоты между точками А и С. В этом случае ортогональная проекция промежуточной точки N на прямую L находится в зоне, которая проходит вдоль прямой L от середины F прямой L по обе стороны от середины F и имеет центр в середине. Высота Н2 зоны меньше 80% высоты Н лопатки 21, предпочтительно меньше 10%.
Кроме того, различные описанные выше версии и варианты выполнения можно комбинировать полностью или частично для получения других вариантов выполнения изобретения.



Группа изобретений относится к рабочему колесу типа колеса Фрэнсиса для гидравлической машины, через которое должен проходить принудительный поток воды. Рабочее колесо типа колеса Фрэнсиса для гидравлической машины содержит венец (1) с симметрией вращения вокруг оси вращения (Z) колеса, потолок (12) и множество изогнутых лопаток (21), неподвижно соединенных с венцом (1) и с потолком (12), каждая из которых имеет периферическую кромку (212). Кромка (212) по меньшей мере одной из лопаток (21) является изогнутой и ее вогнутость обращена наружу колеса. Расстояние, измеренное между любой точкой кромки (212) и прямой, проходящей, с одной стороны, через первую точку сопряжения между кромкой (212) и венцом (1) и, с другой стороны, через вторую точку сопряжения между кромкой (212) и потолком (12), является максимальным на уровне промежуточной точки кромки (212). Радиус промежуточной точки является строго меньшим радиуса первой точки сопряжения и радиуса второй точки сопряжения. Изобретение направлено на разработку рабочего колеса, геометрия которого позволяет стабилизировать скорость вращения колеса во время переходных фаз запуска при относительно малых высотах падения. 4 н. и 11 з.п. ф-лы, 10 ил.
1. Рабочее колесо (R) типа колеса Фрэнсиса гидравлической машины (М), через которое должен проходить принудительный поток воды (Е), содержащее:
- венец (1) с симметрией вращения вокруг оси вращения (Z) колеса,
- потолок (12) с симметрией вращения вокруг оси вращения (Z), расположенный напротив венца (1),
- множество изогнутых лопаток (21), неподвижно соединенных с венцом (1) и с потолком (12), каждая из которых содержит центральную кромку (211) вблизи оси вращения (Z) и периферическую кромку (212), противоположную центральной кромке (211), которая проходит между венцом (1) и потолком (12) и через которую в первую очередь проходит поток (Е), когда гидравлическая машина (М) работает в режиме турбины,
при этом периферическая кромка (212) по меньшей мере одной лопатки (21) является изогнутой и ее вогнутость обращена наружу рабочего колеса (R), при этом первое расстояние (d1), измеренное между любой точкой (Р) периферической кромки (212) и прямой (L), проходящей, с одной стороны, через первую точку сопряжения (А) между периферической кромкой (212) и венцом (1) и, с другой стороны, через вторую точку сопряжения (С) между периферической кромкой (212) и потолком (12), является максимальным на уровне промежуточной точки (N) периферической кромки (212), при этом радиус (Rn) промежуточной точки (N) является строго меньшим радиуса (Ra) первой точки сопряжения (А), отличающееся тем, что радиус (Rn) промежуточной точки (N) является строго меньшим радиуса (Rс) второй точки сопряжения (С).
2. Колесо (200) по п. 1, отличающееся тем, что промежуточная точка (N) является наиболее удаленной от прямой (L).
3. Колесо (200) по п. 1, отличающееся тем, что ортогональная проекция промежуточной точки (N) на прямую (L) находится в зоне, которая проходит вдоль прямой (L) и центр которой находится в середине (F) прямой (L), причем высота (Н2) зоны меньше 80% высоты (Н) каждой лопатки (21), измеренной между первой точкой сопряжения (А) и второй точкой сопряжения (С), предпочтительно меньше 10%.
4. Колесо (R) по п. 1, отличающееся тем, что периферическая кромка (212) лопаток (21) выполнена в виде участка окружности, эллипса, параболы и даже любой кривой.
5. Колесо (R) по п. 1, отличающееся тем, что первое отношение, в котором:
- знаменателем является высота (Н) лопатки (21), измеренная между первой точкой сопряжения (А) и второй точкой сопряжения (С),
- числителем является максимальное расстояние (D21) между прямой (L) и периферической кромкой (212),
составляет от 0% до 200%, предпочтительно от 30% до 80%.
6. Колесо (R) по п. 1, отличающееся тем, что промежуточная точка (N) периферической кромки (212) находится на половине расстояния между точками сопряжения (А, С).
7. Колесо (R) по п. 1, отличающееся тем, что в первой плоскости (Рb), параллельной оси вращения и перпендикулярной ко второй плоскости (Ра), которая проходит через пересечение между потолком (12) и средней поверхностью (S) лопатки (21), находящейся между наружной стороной (213) и внутренней стороной (214) лопатки (21), и которая продолжает эту среднюю поверхность, наружная сторона (213) является выпуклой, а внутренняя сторона (214) является вогнутой.
8. Колесо (R) по п. 7, отличающееся тем, что в первой плоскости (Рb) наружная сторона (213) и внутренняя сторона (214) имеют форму участка окружности, эллипса, параболы и кривой любого вида.
9. Колесо по п. 7 или 8, отличающееся тем, что второе отношение, в котором:
- знаменателем является высота (Н) лопатки (21), измеренная между первой точкой сопряжения (А) и второй точкой сопряжения (С),
- числителем является максимальное расстояние (D22), измеренное параллельно первой плоскости (Рb), между прямой (L) и периферической кромкой (212),
составляет от 0% до 200%, предпочтительно от 10% до 40%.
10. Колесо (R) по п. 7 или 8, отличающееся тем, что в первой плоскости (Рb) промежуточная точка (N) периферической кромки (212) находится на половине расстояния между точками сопряжения (А, С).
11. Колесо (R) по п. 7 или 8, отличающееся тем, что в первой плоскости (Рb) периферическая кромка (212) является криволинейной с вогнутостью, обращенной в том же направлении, что и направление (R1) вращения колеса (200) в режиме турбины.
12. Колесо (R) по п. 7 или 8, отличающееся тем, что второе расстояние (d2), измеренное параллельно первой плоскости (Рb), между любой точкой (Р) периферической кромки (212) и прямой (L), является максимальным в промежуточной точке (N).
13. Гидравлическая машина (М), оборудованная рабочим колесом (R) по одному из предыдущих пунктов.
14. Гидравлическая машина (М) по п. 13, оборудованная рабочим колесом (R) по п. 7, отличающаяся тем, что, когда она работает в режиме турбины, поток (Е) в первую очередь попадает на наружную сторону (213) лопаток (21).
15. Установка (I) преобразования энергии, отличающаяся тем, что содержит гидравлическую машину (М) по одному из п.п. 13 и 14.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| ЛОПАТОЧНЫЙ АППАРАТ РАБОЧЕГО КОЛЕСА РАДИАЛЬНО-ОСЕВОЙ ГИДРОТУРБИНЫ | 2006 |
|
RU2321766C2 |
| DE 10210426 A1, 23.10.2003 | |||
| СУППОРТ ТОКАРНОГО СТАНКА | 0 |
|
SU323190A1 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| JP 2007064018 A, 15.03.2007 | |||
| Способ изучения микроструктуры металлов и сплавов при испытании плоских образцов в процессе растяжения с различными скоростями | 1960 |
|
SU147351A1 |

