Изобретение относится к области измерительной техники и может быть использовано в точном приборостроении и метрологии.
Известные методы измерения систематических погрешностей угловых энкодеров сводятся к сравнению их выходных данных с данными устройств повышенной точности, принимаемых за эталонные средства измерений. К таким устройствам относятся автоколлимационные системы с многогранными отражательными призмами, кольцевые лазеры, описанные, например, в книге: Якушенков Ю.Г. Высокоточные угловые измерения // М.: Машиностроение, 1987. Способы построения этих эталонных устройств принимаются за аналоги. Недостатки способов-аналогов:
- поскольку все известные аналоги являются внешними устройствами по отношению к контролируемым энкодерам, то это вызывает серьезные неудобства из-за необходимости обеспечивать их совместную работу в процессе калибровки и эталонирования;
- наличие механической связи между энкодером и эталоном приводит к уменьшению точности измерений;
- поскольку измеренные на эталоне систематические погрешности могут значительно отличаться от погрешностей в условиях постоянной эксплуатации энкодеров, это частично обесценивает результаты калибровки и эталонирования;
- технические параметры аналогов не всегда соответствуют современным требованиям по точности, дискретности, временной стабильности выходных данных и т.д.;
- большие габариты и цена аналогов.
За прототип заявляемого способа принимается способ измерения угла, описанный в патенте РФ №2419067.
Способ-прототип состоит из следующих операций:
- на объекте измерений устанавливают контрольный элемент с источником света и маской с сигнальной щелью, с помощью которой кодируют измерительный диапазон энкодера;
- измерительный узел формирует изображение этой сигнальной щели в плоскости приемной ПЗС(КМОП)-матрицы, которая детектирует это изображение, после чего информация передается в вычислительный блок;
- вычислительный блок по специальным алгоритмам производит необходимые вычисления цифрового кода угла φ совместно с систематической погрешностью Δφс измерительной шкалы прибора, то есть, измерение систематической погрешности не обеспечено способом-прототипом.
Задачей заявляемого способа является измерение систематической погрешности углового энкодера. Технический результат - упрощение измерения погрешностей.
Поставленная задача решается тем, что в оптическую схему контрольного элемента вводится внутренний эталон угла в виде дополнительной сигнальной щели прототипа, измеряются вариации Δε(φ) эталонного угла ε на различных углах φ в диапазоне 0-360° и по этим вариациям вычисляются систематические погрешности шкалы прибора.
Сущность изобретения поясняется фиг. 1, на которой изображена принципиальная схема реализации заявляемого способа.
Предлагаемая схема (фиг. 1а) реализации способа измерения систематических погрешностей углового энкодера состоит из контрольного элемента (КЭ), жестко крепящегося на поворотном устройстве, измерительного блока (ИБ) и устройства обработки информации (ПК).
Поворотное устройство может быть контролируемым объектом или специализированным образцовым механизмом, которые обеспечивают разворот контрольного элемента на измеряемый угол φ в диапазоне от 0-360° с малой дискретностью (~1′÷1°).
Схема контрольного элемента содержит осветитель (светодиод 1, диафрагму 2, конденсор 3 и сигнальную маску 4, устанавливаемую в фокальной плоскости объектива 5).
Измерительный блок (ИБ) содержит объектив 6 и многоэлементный интегральный фотодектор 7 (ПЗС или КМОП-матрица) в фокальной плоскости объектива 6. Выходной сигнал с ПЗС-матрицы 7 по высокоскоростному порту USВ 2.0 поступает на вычислительный блок (ПК), производящий необходимые вычислительные операции и формирующий цифровые коды угла φ разворота КЭ и систематических погрешностей Δφс (φ) измерительной шкалы энкодера. Контрольный элемент и измерительный блок устанавливаются соосно на некотором расстоянии между собой.
Сигнальная маска 4 (фиг. 1б) содержит две прозрачные узкие радиальные щели, образующие между собой угол ε. Сигнальная щель I обеспечивает измерение угла φ контрольного элемента, а щель II - измерение значения угла φ2=φ1-ε.
Способ реализуется следующим образом. Светодиод 1, точечная диафрагма 2 и конденсор 3 создают равномерную засветку сигнальной маски 4. Объектив 5 коллимирует сигнальный световой поток, прошедший через щели маски 4, и направляет его на ИБ. Приемный объектив 6 строит в своей фокальной плоскости изображение сигнальной маски 4, которое детектируется матрицей 7. Вид сигнального изображения в приемной плоскости матрицы 7 приведен на фиг. 1б и аналогичен топологии сигнальной маски 4. Координатная система 0ji матрицы совпадает с направлением строк и столбцов пикселей. Выходная информация с матрицы 7 поступает в вычислительный блок (ПК), который вырабатывает цифровые коды углов φ1 и φ2 изображения щелей I и II относительно приемной матрицы 7.
Алгоритмы вычисления углов φ1 и φ2 полностью аналогичны алгоритмам определения угла φ в схеме прототипа (см. также статью Гродецкого Ю.А. и др. Абсолютные высокоточные датчики угла нового поколения // Измерительная техника, 2012, №9).
Для определения систематической погрешности Δφс(φ) образуется измеренная величина угла ε=φ1-φ2 и ее вариация Δε(φ).

где  - среднее значение измеренного угла ε в диапазоне углов 0<φ<360°.
- среднее значение измеренного угла ε в диапазоне углов 0<φ<360°.
По значениям функции Δε(φ) путем вычислений определяется искомая функция Δφс(φ).
Таким образом, центральный угол ε между сигнальными щелями I и II на маске 4 выполняет роль внутреннего эталона угла, а его измеренные вариации в плоскости приемной ПЗС-матрицы однозначно определяют систематической погрешности шкалы энкодера.
Поскольку вариации  определяются только измеряемыми величинами углов и φ1 и φ2 за относительно короткое время измерений (≤1÷5 мин), то погрешность определения Δε(φ) сравнима со случайной погрешностью измерения углов φ1 и φ2. Эта погрешность для мегапиксельной ПЗС-матрицы (1280×1024 пикселов) достигает величины 0,06-0,15 угл. сек (см. статью Гродецкого Ю.А. и др. Абсолютные высокоточные датчики угла нового поколения // Измерительная техника, 2012, №9). Для приемных ПЗС-матриц размерностью 2000×2000 пикселов эта погрешность уменьшается примерно в 3 раза, достигая величин 0,02-0,03 угл. сек. Примерно с такой же точностью производится определение систематических погрешностей Δφс(φ) по измеренным вариациям Δε(φ).
определяются только измеряемыми величинами углов и φ1 и φ2 за относительно короткое время измерений (≤1÷5 мин), то погрешность определения Δε(φ) сравнима со случайной погрешностью измерения углов φ1 и φ2. Эта погрешность для мегапиксельной ПЗС-матрицы (1280×1024 пикселов) достигает величины 0,06-0,15 угл. сек (см. статью Гродецкого Ю.А. и др. Абсолютные высокоточные датчики угла нового поколения // Измерительная техника, 2012, №9). Для приемных ПЗС-матриц размерностью 2000×2000 пикселов эта погрешность уменьшается примерно в 3 раза, достигая величин 0,02-0,03 угл. сек. Примерно с такой же точностью производится определение систематических погрешностей Δφс(φ) по измеренным вариациям Δε(φ).
Отметим также, что дискретность задания угла φ разворота КЭ относительно приемного блока ИБ ограничена только устройством разворота КЭ и может достигать практически «нулевых» величин. Само же устройство задания углов разворота КЭ может быть как внешним (образцовым) по отношению к контролируемому энкодеру, так и штатным (рабочим) узлом эксплуатации энкодера. В последнем случае измеренные систематические погрешности будут соответствовать именно рабочим условиям эксплуатации энкодера.
Из (1) с учетом малости случайных погрешностей измерения углов φ1 и φ2 непосредственно получается

Представим искомую функцию систематической погрешности Δφс(φ) в виде ряда Фурье по sin kφ на участке 0<φ<2π

где 
Подстановкой (3) в (2) получаем
где 
Вводя замену переменных  , получаем окончательное выражение для вычисления Δφс(φ)
, получаем окончательное выражение для вычисления Δφс(φ)



Таким образом, определение функции Δφс(φ) по измеренным значениям вариаций Δε(φ) угла ε сводится к разложению последних в ряд Фурье по coskφ и вычислению искомой функции Δφс(φ) по формуле (7).
Формула (7) содержит «запрещенные» гармоники, при которых  и, следовательно,
и, следовательно,

Для снятия этих запретов на маску 4 наносится несколько (>2) сигнальных щелей с тем, чтобы для любых значимых k можно было выбрать j-тую щель с εj, при котором условие (8) не выполняется. На фиг. 1б пунктиром показано изображение III щели с углом ε2.
Например, ε1=90°, ε2=60°.
Тогда, при k=1, 2, 3, 5, 6, 7 величина  , а для ε2=60° при
, а для ε2=60° при  и при k=8
и при k=8 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПЛОСКОГО УГЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2451903C1 |
| АБСОЛЮТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА (ВАРИАНТЫ) | 2009 |
|
RU2419067C2 |
| ПРЕЦИЗИОННЫЙ ДАТЧИК РАССТОЯНИЙ | 2014 |
|
RU2567185C1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ПРОФИЛЯ | 2008 |
|
RU2399024C2 |
| БЕСКОНТАКТНЫЙ ТРЕХКООРДИНАТНЫЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2191348C2 |
| Устройство для измерений мгновенных угловых перемещений качающейся платформы | 2016 |
|
RU2642975C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРИВЕДЕННОГО МОМЕНТА ИНЕРЦИИ МЕХАНИЗМА | 2011 |
|
RU2460050C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 1994 |
|
RU2080631C1 |
Изобретение относится к области измерительной техники и может быть использовано в точном приборостроении и метрологии. Способ заключается в кодировании измерительного диапазона прибора с помощью светоконтрастных щелей сигнальной маски, устанавливаемой на объекте, формировании изображения этой щели в плоскости приемной ПЗС(КМОП)-матрицы, передаче этого изображения в вычислительный блок. При этом в схему прибора вводится внутренний эталон угла, реализованный изменением топологии сигнальной маски за счет одной дополнительной светоконтрастной щели с центральным углом между ней и штатной щелью, измеряются вариации Δε(φ) угла ε на различных углах φ разворота ротора в диапазоне 0<φ<360° и по этим вариациям вычисляются систематические погрешности Δφс(φ) измерительной шкалы энкодера. Технический результат - упрощение измерения погрешностей. 1 ил.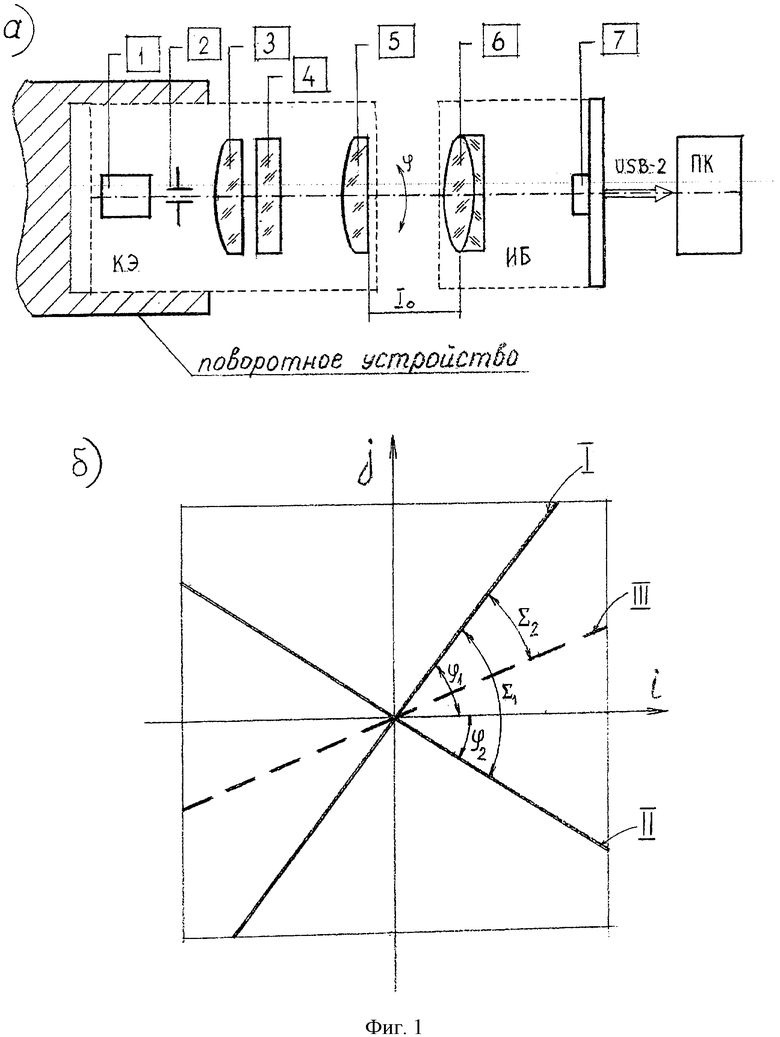
Способ измерения систематических погрешностей угловых энкодеров, заключающийся в кодировании измерительного диапазона прибора с помощью светоконтрастных щелей сигнальной маски, устанавливаемой на объекте, формировании изображения этой щели в плоскости приемной ПЗС(КМОП)-матрицы и передаче этого изображения в вычислительный блок, отличающийся тем, что в схему прибора вводится внутренний эталон угла, реализованный изменением топологии сигнальной маски за счет одной дополнительной светоконтрастной щели с центральным углом между ней и штатной щелью, измеряются вариации Δε(φ) угла ε на различных углах φ разворота ротора в диапазоне 0<φ<360° и по этим вариациям вычисляются систематические погрешности Δφc(φ) измерительной шкалы энкодера.
| СПОСОБ ИЗМЕРЕНИЯ ПЛОСКОГО УГЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2451903C1 |
| Способ юстировки устройства для измерения плоских углов | 1987 |
|
SU1509586A1 |
| ГОНИОМЕТР | 2002 |
|
RU2222777C1 |
| US 20080117414 A1, 22.05.2008 | |||

