Предлагаемые способ и устройство относятся к области измерительной техники и могут быть использованы в точном приборостроении, астрономии, метрологии.
Известны способы измерения плоского угла, реализованные в прецизионных преобразователях угла, наиболее точными из которых являются фотоэлектрические датчики вал-код, описанные в книге Якушенков Ю.Г. Высокоточные угловые измерения. Москва, Машиностроение, 1987, глава 8.
Аналогом заявляемого способа измерения плоского угла является способ преобразования (считывания) угла с помощью кодирования углового диапазона прибора двоичным кодом Грея, описанный в книге: Якушенков Ю.Г. Высокоточные угловые измерения. Москва, Машиностроение, 1987, стр.272-274.
Недостатками способа-аналога являются:
- наличие механической связи между объектом и прибором и внутреннего механизма вращения, что приводит к уменьшению точности измерений и увеличению стоимости прибора;
- ограничение точности измерений из-за принципиальной невозможности получения шага младшего разряда кода меньше длины волны света (λ≅0,5 мкм);
- большие габариты прибора.
Прототипом заявляемого способа является способ измерений угла, описанный в статье: Гродецкий Ю.А., Дукаревич Ю.Е., Иванов Ю.М. // Абсолютные датчики угла нового поколения // Материалы VIII Всероссийской научно-технической конференции «Метрологическое обеспечение обороны и безопасности в Российской Федерации», п.Поведники Московской обл., 26-27 октября 2010 г.
Способ-прототип состоит из следующих операций:
- на объекте измерений устанавливают контрольный элемент с источником света и маской с сигнальной щелью, с помощью которого кодируют измерительный диапазон прибора;
- измерительный угол формирует изображение этой сигнальной щели в плоскости приемной ПЗС (КМОП)-матрицы, которая детектирует это изображение, после чего изображение передается в вычислительный блок;
- вычислительный блок производит вычисление по специальным алгоритмам цифрового кода угла разворота контрольного элемента относительно измерительного узла.
Недостатком способа-прототипа является то, что кодирование измерительного диапазона производится с помощью одной сигнальной щели, то есть по одноотсчетной схеме, что приводит к ограничению точности измерений.
Задача заявляемого способа - повышение точности измерений.
Поставленная задача достигается тем, что кодирование измерительного диапазона производится по двухотсчетной схеме, содержащей канал грубого отсчета в центральной зоне маски с сигнальной щелью, и канал точного отсчета с множеством N>>1 сигнальных щелей в периферийной зоне маски. Введение в схему прибора канала точного отсчета позволяет за счет статистической обработки N изображений сигнальных щелей повысить точность измерений в  раз.
раз.
Наиболее совершенными аналогами заявляемого устройства, существующими на мировом рынке, являются приборы фирмы Haiden Hain, имеющие точность измерений ≈0,4 угл. сек.
Основными недостатками этих способов и приборов являются:
- недостаточная точность измерений;
- большие габариты и вес;
- механическая связь с объектами измерений, приводящая к дополнительному снижению точности измерений.
Ближайшим аналогом (прототипом) устройства выбирается устройство, реализующее способ измерения плоского угла и описанное в заявке №2009108223 от 26.02.2009 г. на выдачу патента РФ на изобретение «Абсолютный преобразователь угла» (опубликовано 10.09.2010 г., бюллетень Роспатента «Изобретения. Полезные модели» №25, 2010 г.).
Способ измерения плоского угла, реализованный в схеме прибора-прототипа, содержит маску с сигнальной щелью, устанавливаемой на объекте, осветительную и приемную схему с объективом и ПЗС (КМОП)-матрицей в плоскости изображения сигнальной щели и вычислитель, осуществляющий вычисление угла разворота φ объекта измерений. Точность измерений устройства-прототипа составляет 0,1÷0,2 угл. сек.
Основным недостатком прототипа является ограниченная величиной 0,1÷0,2 угл. сек. точность измерений.
Задача предлагаемого изобретения - повышение точности измерений прибора до уровня 0,01÷0,03 угл. сек.
Поставленная задача достигается тем, что в предлагаемой схеме прибора маска с сигнальной щелью выполнена в виде двух зон: центральной и периферийной.
В центральной зоне располагается канал грубого отсчета с одной щелью, служащий для определения номера периода канала точного отсчета.
В периферийной зоне, являющейся зоной канала точного отсчета, нанесено М>>1 сигнальных щелей, и, таким образом, канал точного отсчета становится периодическим с периодом  .
.
Повышение точности измерений осуществляется в канале точного отсчета за счет статистической обработки измерительной информации по М сигнальным щелям, что приводит к повышению точности примерно в  раз.
раз.
Сущность изобретения поясняется фиг.1, 2.
На фиг.1 изображена принципиальная схема реализации способа.
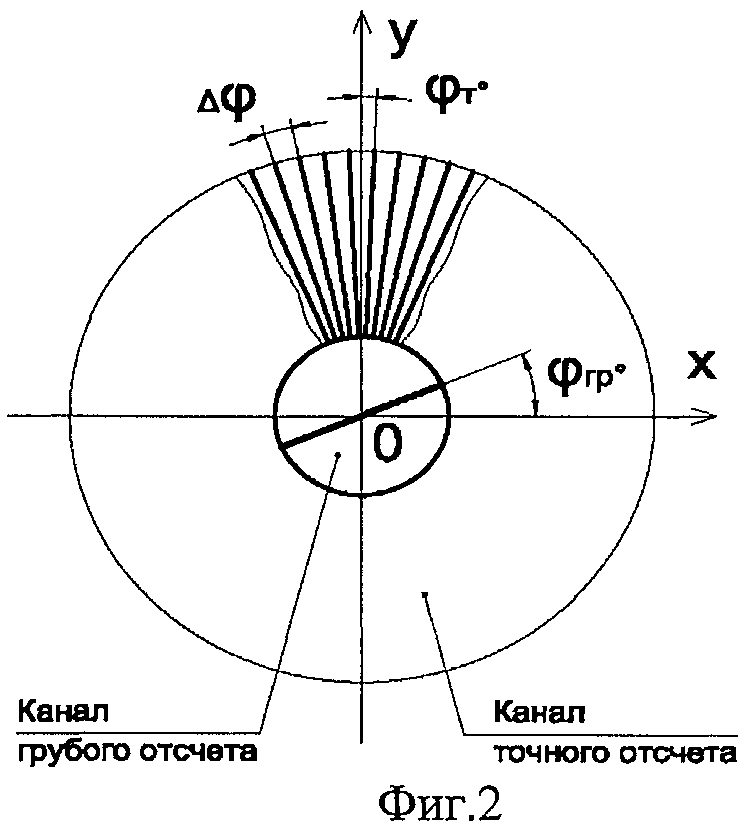
На фиг.2 изображен вид маски с сигнальной щелью.
Предлагаемая схема реализации способа измерения плоского угла состоит из контрольного элемента (КЭ), жестко крепящегося на контролируемом объекте, измерительного блока (ИБ) и устройства обработки информации (ПК).
Схема КЭ содержит осветитель (светодиод 1, диафрагму 2, конденсор 3 и маску с сигнальной щелью 4, устанавливаемую в фокальной плоскости объектива 5). Измерительный блок (ИБ) содержит объектив 6 и многоэлементный интегральный фотодетектор 7 (ПЗС или КМОП-матрица). Выходной сигнал с фотодетектора 7 по высокоскоростному порту USB 2.0 поступает на вычислительный блок (ПК), производящий необходимые вычислительные операции и формирующий цифровой код измеряемого угла φ разворота КЭ относительно ИБ. Контрольный элемент КЭ и измерительный блок ИБ устанавливаются соосно один по отношению к другому. Маска с сигнальной щелью 4 (фиг.2) построена по двухотсчетной схеме. В центральной зоне (канал грубого отсчета) выполнена прозрачная узкая щель на непрозрачном фоне. В периферийной зоне (канал точного отсчета) нанесена серия таких прозрачных узких щелей с угловым периодом  , где М - число сигнальных щелей.
, где М - число сигнальных щелей.
Способ реализуется следующим образом. Светодиод 1, точечная диафрагма 2 и конденсор 3 создают равномерную засветку маски 4. Объектив КЭ 5 коллимирует сигнальный световой поток, прошедший через сигнальные щели маски 4, и направляет его на измерительный блок ИБ. Приемный объектив 6 строит в своей фокальной плоскости изображение сигнальной маски 4, которое детонируется фотодетектором 7, установленным в плоскости этого изображения. Выходная информация с фотодетектора 7 поступает в вычислительный блок (ПК), вырабатывающий цифровой код угла φ по формуле:

где φт - отсчет по каналу точного отсчета;
m - номер периода канала точного отсчета, определяемого по каналу грубого отсчета.
Поскольку схема (фиг.1) является коллимационной, то измерение угла φ может адекватно производиться при поступательных смещениях КЭ относительно измерительного блока ИБ по всем ортогональным осям.
Определение угла φ производится по следующей формуле:
где -x1÷x1 - границы зоны канала грубого отсчета по оси OX;
у(х) - функция пространственного положения энергетического центра изображения сигнального штриха в плоскости OXY приемной ПЗС-матрицы.
В цифровом виде выражение (1) имеет форму
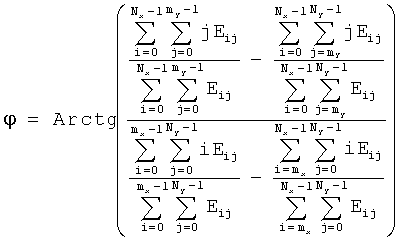
где Nx - размерность КМОП-матрицы вдоль оси X (число столбцов),
mx - координата середины изображения вдоль оси X,
Ny - размерность КМОП-матрицы вдоль оси Y (число строк),
mу - координата середины изображения вдоль оси Y,
Еij - амплитуда сигнала в точке [ij],
i, j - индексы.
В свою очередь, значение функции y(x) по каждой строке i матрицы определяется по формуле
где E(xj, y) - функция распределения энергии изображения точек штриха по координате Y для i строки.
Точность измерения у(хi) определяется стабильностью пространственного положения вокруг оси OZ оптических элементов схемы КЭ (маски с сигнальной щелью 4 и объектива 5 КЭ) и случайной погрешностью δ(y) детектирования сигнального изображения. Это обусловлено тем, что все виды систематических погрешностей легко выявляются и исключаются при калибровке прибора.
Экспериментальное значение δ(y)i≅0,03·Δy пиксела.
Кроме того, из-за многочисленных факторов, влияющих на δ(y), на основании центральной предельной теоремы для случайных величин можно утверждать, что распределение δ(y)i по строкам (столбцам) фотоприемной матрицы (i, j) подчиняется нормальному закону (см. Бендат Дж., Пирсол А. Измерение и анализ случайных процессов. Москва: Мир, 1971, стр.80).
На этом основании, если длина изображения сигнального штриха занимает N строк (столбцов) матрицы, применяемые алгоритмы дают значение

Для одноотсчетной схемы прототипа, в котором применена матрица размерностью 1024×1280 пикселов, δ(φ)N≅0,2 угл. сек. (при N≅103).
Для предлагаемого прибора в канале грубого отсчета фактически применена схема прототипа с тем различием, что необходимая точность измерений δ(φ)гр равна 5÷15°.
Поэтому практически длина сигнального штриха Nгр не превышает 10 столбцов и строк матрицы, т.к.

Для канала точного отсчета детектирования углового положения изображения отдельного штриха с номером k возможно с осреднением по Nто строкам (столбцам) приемной матрицы

где Nпзс - число строк (столбцов) матрицы, Nпзс=103.
Поэтому погрешность δ(φ)m по одному штриху на основании (4) равна

Вычисление величины δ(φ)m канала точного отсчета производится по формуле:
где М - число сигнальных штрихов в канале точного отсчета.
На основании (5) имеем величину случайной погрешности δ(φ)Σ

Максимальное значение М определяется, в основном, разрешающей способностью объективов 5 и 6, а также размерами приемной плоскости ПЗС-матриц, применяемых в качестве фотодетектора 7.
Если принять, что практически значение М находится в диапазоне М=100÷400, то

Угловой период Δφто канала точного отсчета равен  поэтому необходимая точность измерения канала грубого отсчета δ(φ)гр≤Δφто≤1°.
поэтому необходимая точность измерения канала грубого отсчета δ(φ)гр≤Δφто≤1°.
| название | год | авторы | номер документа |
|---|---|---|---|
| АБСОЛЮТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА (ВАРИАНТЫ) | 2009 |
|
RU2419067C2 |
| СПОСОБ ИЗМЕРЕНИЯ СИСТЕМАТИЧЕСКИХ ПОГРЕШНОСТЕЙ УГЛОВЫХ ЭНКОДЕРОВ | 2014 |
|
RU2558000C1 |
| ПРЕЦИЗИОННЫЙ ДАТЧИК РАССТОЯНИЙ | 2014 |
|
RU2567185C1 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ПРОФИЛЯ | 2008 |
|
RU2399024C2 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| БЕСКОНТАКТНЫЙ ТРЕХКООРДИНАТНЫЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2191348C2 |
| Устройство для измерений мгновенных угловых перемещений качающейся платформы | 2016 |
|
RU2642975C2 |
| ДАТЧИК УГЛА ПОВОРОТА | 2013 |
|
RU2569072C2 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| ПРЕОБРАЗОВАТЕЛЬ КРУГОВЫХ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2057287C1 |
Способ заключается в кодировании измерительного диапазона прибора с помощью сигнальных щелей маски, формировании изображения сигнальной щели в плоскости приемной ПЗС (КМОП)-матрицы и передаче полученного изображения в вычислительный блок. Кодирование измерительного диапазона прибора производится по двухотсчетной схеме. Канал грубого отсчета в виде одной сигнальной щели расположен в центральной зоне маски, а канал точного отсчета в виде N сигнальных щелей, где N>>1, расположен в периферийной зоне маски. Устройство для реализации способа содержит расположенный на объекте контрольный элемент, состоящий из маски с сигнальными щелями, осветителя и объектива, и измерительный блок, содержащий объектив, ПЗС (КМОП)-матрицу, выполняющую функцию фотодетектора, а также вычислительный блок. Контрольный элемент и измерительный блок установлены соосно друг другу. Маска содержит периферийную кольцевую зону канала точного отсчета с N сигнальными щелями и центральную зону канала грубого отсчета с одной сигнальной щелью. Технический результат - повышение точности измерения угла. 2 н.п. ф-лы, 2 ил.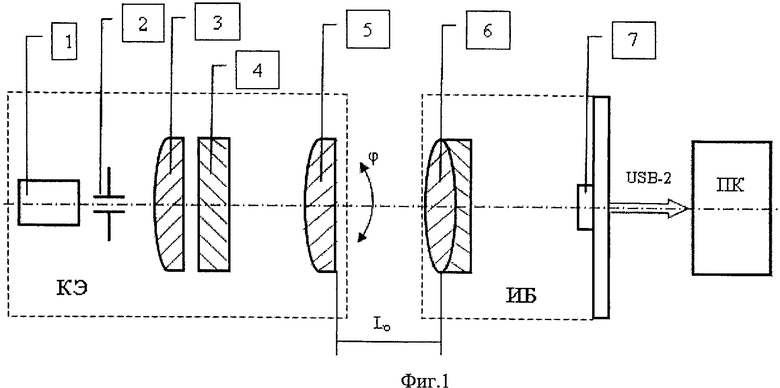
1. Способ измерения плоского угла, заключающийся в кодировании измерительного диапазона прибора с помощью сигнальных щелей маски, установленной на объекте, формировании изображения сигнальной щели в плоскости приемной ПЗС(КМОП)-матрицы, передаче полученного изображения сигнальной щели в вычислительный блок (ПК), отличающийся тем, что кодирование измерительного диапазона прибора производится по двухотсчетной схеме, причем канал грубого отсчета в виде одной сигнальной щели расположен в центральной зоне маски, а канал точного отсчета в виде N сигнальных щелей, где N>>1, расположен в периферийной зоне маски.
2. Устройство для измерения плоского угла, содержащее расположенный на объекте контрольный элемент (КЭ), состоящий из маски с сигнальными щелями, осветителя и объектива, измерительный блок (ИБ), содержащий объектив и ПЗС(КМОП)-матрицу, при этом КЭ и ИБ установлены соосно друг другу, и вычислительный блок, соединенный с ПЗС(КМОП)-матрицей, при этом осветитель КЭ содержит светодиод, диафрагму и конденсор, отличающееся тем, что маска содержит периферийную кольцевую зону канала точного отсчета с М сигнальными щелями, где М - число сигнальных щелей в канале точного отсчета, и центральную зону канала грубого отсчета с одной сигнальной щелью.
| RU 2009108223 А, 10.09.2010 | |||
| ОПТИКО-ЭЛЕКТРОННЫЙ ИЗМЕРИТЕЛЬ УГЛА ПОВОРОТА АЛИДАДЫ | 1994 |
|
RU2092790C1 |
| ИЗМЕРИТЕЛЬ УГЛОВ (ВАРИАНТЫ) | 1994 |
|
RU2116618C1 |
| US 5018853 А, 28.05.1991 | |||
| Способ прокатки из жидкого металла | 1936 |
|
SU52684A1 |
| JP 59147204 A, 23.08.1984. | |||

