Изобретение относится к области измерительной техники и может быть использовано в точном приборостроении, машиностроении, метрологии и других отраслях промышленности.
Известен лазерный радар MV260 (фирмы Metric Vision, США, Приложение к настоящему описанию предполагаемого изобретения), построенный по принципу светолокации.
Основным недостатком известного лазера является низкая абсолютная точность, лежащая в диапазоне 0,1÷0,025 мм, а также высокая цена прибора и большие его габариты.
Известны также триангуляционные датчики расстояния фирмы MEL Mikroelektronik Германия, один из которых, модель M7LL (http://www.melsensor.de/optoelectronic-distance-sensors.html?Itemid=64), выбран в качестве прототипа к заявленному прецизионному датчику расстояний. Известный датчик содержит осветительную схему с лазерным диодом, формирующую узкий зондирующий световой луч, направленный на измеряемую поверхность, и одноканальную приемную схему с позиционно-чувствительным фотодиодом или с ПЗС-линейкой в качестве детектора. За счет того, что оптические оси осветителя и приемной схемы разнесены на параллактический угол φ≠0, в приемной плоскости возникают линейные параллаксы изображений светлых точек, зависящие от координаты дальности Z до объекта, которые и измеряются с помощью линейного детектора.
Основным недостатком прототипа является неустранимая нестабильность выходных данных, вызванная тем, что отсчетная точность определения координат сигнального изображения достигает величин ≈0,1÷0,03 мкм. Кроме того, при одноканальной приемной схеме в прототипе невозможно обеспечить стабильность на таком уровне между осью зондируемого луча и приемным изображением из-за деформаций конструкции прибора. Поэтому в рекламных материалах приборов, выпускаемых этой фирмой, приводятся только параметры чувствительности (разрешения), а реальная точность хуже параметров чувствительности измерений примерно в 10 и более раз. Так, в прототипе для диапазона измерений ΔZ=100 мм разрешение δZ=0,06 мм, то есть относительная точность 
Технической задачей предлагаемого изобретения является повышение абсолютной и относительной точности измерений.
Для достижения технического результата в прецизионном датчике расстояний, содержащем осветительную схему с лазерным диодом, приемную схему и фотодетектор, приемная схема выполнена двухканальной и состоит из оптической системы, включающей две ромб-призмы и два отклоняющих клина, и приемной проекционной системы, включающей цилиндрическую линзу и сферический объектив, а в качестве фотодетектора использована двухкоординатная ПЗС-матрица, выход которой подключен к персональному компьютеру или специализированному контроллеру.
По сравнению с известными аналогами и прототипом предлагаемая конструкция прецизионного датчика расстояний позволяет повысить точность измерений за счет выполнения приемной схемы двухканальной, использования ромб-призм и ПЗС-матрицы. Совокупность таких существенных признаков позволила исключить нестабильность выходных данных при любых деформациях конструктивных элементов, что существенно влияет на повышение точности измерений.
Таким образом предлагаемое изобретение обеспечивает достижение поставленной задачи, является новым и промышленно применимым.
Предлагаемое изобретение поясняется чертежами, где:
на фиг. 1 представлена принципиальная схема прецизионного датчика расстояний,
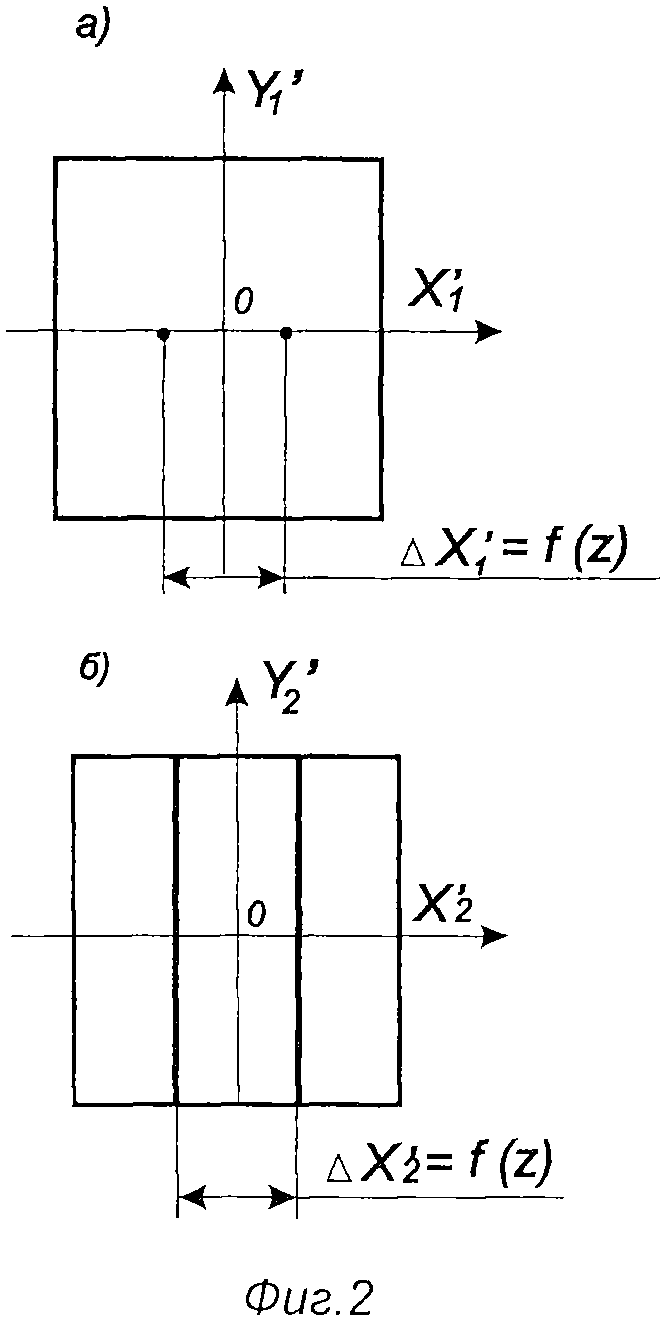
на фиг. 2 представлены изображения в виде световых линий, формируемые в плоскости приемной ПЗС-матрицы.
Прецизионный датчик расстояний (фиг. 1) содержит осветительную схему, состоящую из лазерного диода 1, объектива 2 и призмы 3 и формирующую узкий зондирующий световой поток, распространяющийся по оси датчика на измеряемую поверхность объекта, двухканальную приемную схему, состоящую из оптической системы, включающей два отклоняющих клина 4 и две ромб-призмы 5, и приемной проекционной системы, включающей цилиндрическую линзу 6 и проекционный сферический объектив 7, двухкоординатную ПЗС-матрицу 8, используемую в качестве фотодетектора, выход которой подключен к персональному компьютеру ПК. Буквой В обозначена линейная база датчика.
Схема датчика функционирует следующим образом.
Осветительная схема формирует на поверхности объекта зондирующее световое («точечное») пятна круглой формы. Диффузная часть отраженного от объекта светового потока попадает на входные отклоняющие клинья 4, далее проходит ромб-призмы 5 и поступает на приемную проекционную систему. В отличие от традиционных изоморфных систем (сферического объектива 7), эта система анаморфотна и содержит дополнительно цилиндрическую линзу 6 с плоскостью фокусировки по оси OY.
В результате в плоскости приемной двухкоординатной ПЗС-матрицы 8 будет построено два изображения в виде световых линий вдоль оси 0′Y′ с 

Выходной информацией о координате дальности Z является расстояние ΔХ′, измеряемое в плоскости ПЗС-матрицы 8:

где:
Z - расстояние до объекта,
φ1 - параллактические углы,
Vx - увеличение проекционного объектива.
Из фиг. 1 и 2 видно, что малые линейные и угловые подвижки всех элементов схемы заявленного датчика не приводят к изменению величины
Для заявленного прецизионного датчика расстояний выходная информация о Z представляется в виде среднего значения ΔХ по всем строкам ПЗС-матрицы 8, то есть:

где:
М - число строк ПЗС-матрицы 8.
Дифференцируя уравнение (2), получаем выражение для погрешностей измерений 8L:

где:

Погрешность
где
ΔХ-X - размер пикселов ПЗС-матрицы 8.
С учетом этой величины из уравнения (3) выражение для погрешностей имеет следующий вид:

Следует отметить, что для однокоординатного фотодетектора (ПЗС-линейки) М=1. Таким образом, повышение чувствительности измерений схемы (фиг. 1) по сравнению с прототипом составляет величину 
Изготовленный и испытанный макетный образец заявленного датчика расстояний показал, что погрешность измерений δZ расстояния до объекта составила величину, равную 0,003÷0,01 пиксела, включая случайную погрешность измерений и долговременную нестабильность за t≥8 часов. Для ПЗС-матрицы разрядности 1240х1024 пикселов относительная точность измерений составляет 
и может быть улучшена в 2÷3 раза на этапе создания опытных образцов заявленного прецизионного датчика расстояний.
Таким образом, использование заявленного изобретения позволяет повысить абсолютную и относительную точности измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ПРОФИЛЯ | 2008 |
|
RU2399024C2 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| БЕСКОНТАКТНЫЙ ТРЕХКООРДИНАТНЫЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2191348C2 |
| АБСОЛЮТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА (ВАРИАНТЫ) | 2009 |
|
RU2419067C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОСКОГО УГЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2451903C1 |
| СПОСОБ ИЗМЕРЕНИЯ СИСТЕМАТИЧЕСКИХ ПОГРЕШНОСТЕЙ УГЛОВЫХ ЭНКОДЕРОВ | 2014 |
|
RU2558000C1 |
| ОДОМЕТР ДЛЯ ВНУТРИТРУБНОГО СНАРЯДА-ДЕФЕКТОСКОПА | 2004 |
|
RU2275598C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО ВНУТРИТРУБНЫМ СНАРЯДОМ-ДЕФЕКТОСКОПОМ С ОДОМЕТРАМИ | 2006 |
|
RU2316782C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ОДОМЕТРАМИ | 2005 |
|
RU2306479C2 |
| СИСТЕМА КОНТРОЛЯ ИЗНОСА ВАГОННЫХ КОЛЕСНЫХ ПАР | 2003 |
|
RU2247319C1 |
Изобретение касается прецизионного датчика расстояния. Особенностью указанного датчика является то, что приемная схема выполнена двухканальной и состоит из оптической системы, включающей две ромб-призмы и два отклоняющих клина, и приемной проекционной системы, включающей цилиндрическую линзу и сферический объектив, а в качестве фотодетектора использована двухкоординатная ПЗС-матрица, выход которой подключен к персональному компьютеру или контроллеру. Технический результат заключается в повышении абсолютной и относительной точности измерений. 2 ил.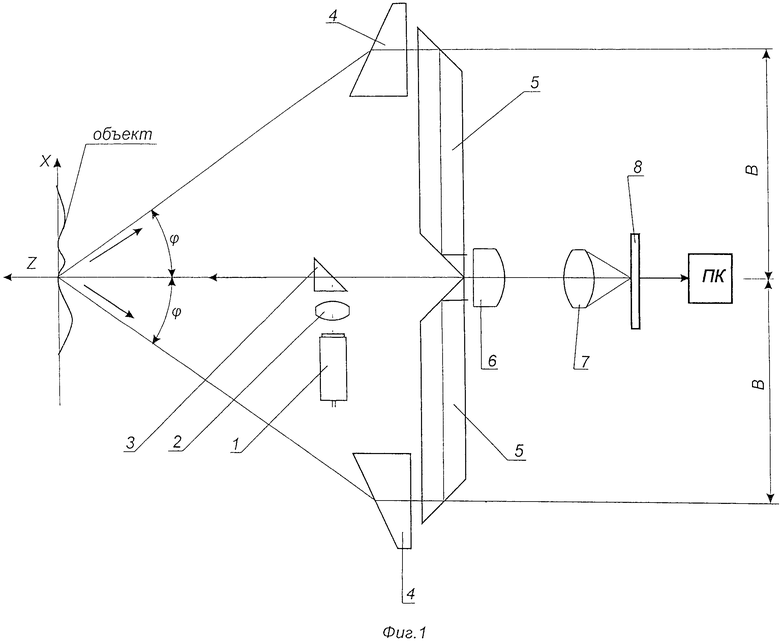
Прецизионный датчик расстояний, содержащий осветительную схему с лазерным диодом, приемную схему и фотодетектор, отличающийся тем, что приемная схема выполнена двухканальной и состоит из оптической системы, включающей две ромб-призмы и два отклоняющих клина, и приемной проекционной системы, включающей цилиндрическую линзу и сферический объектив, а в качестве фотодетектора использована двухкоординатная ПЗС-матрица, выход которой подключен к персональному компьютеру или специализированному контроллеру.
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ПРОФИЛЯ | 2008 |
|
RU2399024C2 |

