Изобретение относится к измерительным устройствам, использующим оптические средства измерения, и может применяться в различных отраслях промышленности и хозяйственной деятельности для определения координат поверхности трехмерных объектов.
Известно устройство для бесконтактного измерения координат по патенту США 5402364, реализующее трехмерный координатный метод измерений с помощью лазерного сканера и двух телевизионных камер на ПЗС, несущие координатную информацию, сигналы которых обрабатываются в компьютерной системе. Недостатком устройства является малая точность измерений и низкая скорость получения данных, что обусловлено использованием точечного зондирования поверхности объекта измерения узким световым лучом.
Наиболее близким по своей технической сущности к заявляемому является бесконтактный измеритель расстояний по патенту РФ 2124700, предназначенный для измерения координат поверхности объемных объектов. Он содержит формирующий зондирующую световую линию на поверхности объекта измерения осветительный узел, двухканальную приемную проекционную систему и преобразовательно-вычислительный блок. Осветительный узел содержит расположенные на общей оптической оси цилиндрическую линзу, объектив и лазерный диод, установленный в фокальной плоскости объектива. Двухканальная приемная проекционная система имеет объективы, установленные на базовом расстоянии друг от друга. На оптической оси каждого из каналов расположены ПЗС-матрицы, выходы которых включены на входы преобразовательно-вычислительного блока, состоящего из блок-координатора и формирующего выходной код контроллера, входы которого соединены с выходами блок-координатора. Основным недостатком этого устройства является низкая как абсолютная, так и относительная точность измерений. Это предопределяется конструктивными особенностями устройства, каждый из каналов двухканальной приемной проекционной системы которого работает на собственную ПЗС-матрицу, что в условиях внешних возмущений не позволяет обеспечить долговременную стабильность взаимного расположения элементов устройства. Задачей предлагаемого технического решения является повышение абсолютной и относительной точности измерений.
Это достигается тем, что бесконтактный измеритель расстояний, который содержит формирующий зондирующую световую линию на поверхности объекта измерения осветительный узел, двухканальную приемную проекционную систему, ПЗС-матрицу и преобразовательно-вычислительный блок, на вход которого включен выход ПЗС-матрицы, отличается тем, что ПЗС-матрица установлена на оптической оси проекционного объектива двухканальной приемной проекционной системы, которая снабжена двумя пентапризмами и зеркально-призменным разделительным узлом.
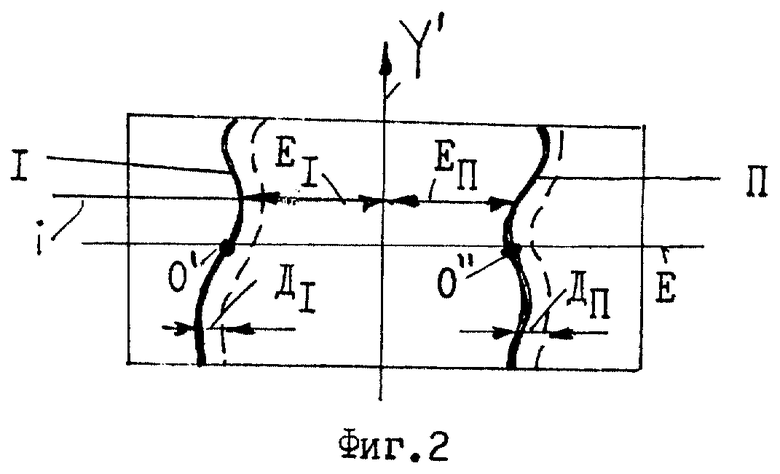
Прилагаемые чертежи поясняют суть предложения. На фиг.1 показана принципиальная схема бесконтактного измерителя расстояний с проекциями объекта измерения XOZ и YOZ, на фиг.2 приведен вид приемного изображения в плоскости ПЗС-матрицы.
Бесконтактный измеритель расстояний (фиг.1) содержит формирующий зондирующую световую линию на поверхности объекта 00 измерения осветительный узел 22, двухканальную приемную проекционную систему 33, ПЗС-матрицу 44 и преобразовательно-вычислительный блок 55, на вход которого включен выход ПЗС-матрицы 44.
Осветительный узел 22 содержит расположенные на общей оптической оси цилиндрическую линзу 23, объектив 24 и лазерный диод 25, установленный в фокальной плоскости объектива 24.
Двухканальная приемная проекционная система 33 снабжена двумя пентипризмами 34 и 35, разнесенными на базовое расстояние В, и зеркально-призменным разделительным узлом, выполненным, например, в виде разделительной прямоугольной призмы 36 с зеркальными катетами, кроме того, в ней могут быть использованы сменные оптические клинья 37 и 38.
Двухкоординатная ПЗС-матрица 44 установлена на оптической оси проекционного объектива 39 двухканальной приемной проекционной системы 33. Преобразовательно-вычислительный блок 55 содержит персональный компьютер 56, видеокарту 57, выход которой подключен к входу персонального компьютера 56, и усилитель 58, выход которого включен на вход видеокарты 57, а его вход соединен с выходом ПЗС-матрицы 44.
Осветительный узел 22 формирует в плоскости YOZ узкий световой поток с углом расхождения Су, который образует световую зондирующую линию на поверхности объекта ОО.
В двухканальной приемной проекционной системе 33 совмещение осей канала I и канала II осуществляется прямоугольной призмой 36 с зеркальными катетами, причем верхняя половина проекционного объектива 39 строит изображение канала I, а нижняя - канала II. Вид приемного изображения в плоскости ПЗС-матрицы 44 показан на фиг.2 Изображение точек зондирующей линии на объекте измерения, полученных в каналах I и II, строятся в левой и правой половинах ПЗС-матрицы 44. На фиг.2 они изображены сплошными линиями I и II. Выходной информацией предлагаемого измерителя являются координаты точек линий I и II, причем координаты точек М объекта OO измерений определяются как YМ=K1xYi, ZМ= К2(EIi-EIIi), где i - номер строки ПЗС-матрицы 44, Yi - центр i-ой строки, ЕIi и ЕIIi - координаты центра световой линии в i-ой строке, полученные в каналах I и II, K1 и K2 - расчетные коэффициенты, определяемые параметрами оптической схемы устройства (угол Ф, расстояние L, фокальное расстояние объектива 39).
Оптическая схема измерителя (фиг.1) может обеспечить независимость только одной координаты, то есть величины ZМ от относительных смещений ее элементов, что и требуется, так как K1=K2/Ф. Поскольку реально Ф<1, то для достижения одинаковой точности измерений координат YМ и ZМ измерение величин ЕIi и ЕIIi должно производиться в 1/Ф>1 раз точнее, чем координаты Yi. Точность определения Yi равна ДYn, а точность определения ЕIi(ЕIIi)-0,05-0,1 ДХn, где ДYn и ДХn - размеры пикселей ПЗС-матрицы 44. Обычно ДYn ~ДХn ~ 5-10 мкм.
Независимость величины ZМ от возможных малых линейных смещений пентапризм 34 и 35 определяется тем, что любые линейные смещения их эквивалентны смещениям плоскопараллельной пластины, то есть не вызывают смещений изображений линий I и II в плоскости ПЗС-матрицы 44, а угловое смещение Г1 и Г2 не вызывает углового смещения выходящих из пентапризм 34 и 35 лучей по определению, так как угол между входящим и выходящим в пентапризму лучами равен 2Э при любых Г1 и Г2 и, следовательно, определяется только стабильностью угла Э, которая практически абсолютна.
Линейные смещения призмы 36 не меняют угол вхождения лучей в объектив 39 и, следовательно, не приводят к смещениям изображений точек М. Угловой разворот призмы 36 (угол Е) приводит к одинаковому параллельному смещению линий I и II (фиг.2), то есть Д1=Д2=2ES, где S - расстояние между объективом 39 и приемной фоточувствительной плоскостью ПЗС-матрицы 44. Поэтому величина ZМ= К2(ЕI-ДI-ЕII+ДII)=К2(ЕI-EII)=conts при любых Е.
Аналогично линейное смещение объектива 39 на величину Р приводит к смещению всего изображения в плоскости ПЗС-матрицы 44 на величину Р и поэтому ZМ=К2(ЕI-Р-ЕII+С)=const.
Стабильность результатов не нарушается с введением оптических клиньев 37 и 38, поскольку малые развороты в плоскости их главного сечения (плоскость XOZ) не приводит к смещению между входящим и выходящим лучами. Таким образом, приведенная на фиг.1 оптическая схема предлагаемого устройства является пространственно нерастраиваемой для величины ZM=К2(ЕIM-ЕIIM) при всех возможных относительных смещениях ее элементов.
Предлагаемое устройство (фиг.1 и 2) работает следующим образом.
Осветительный узел 22 формирует зондирующий световой поток, который высвечивает на поверхности объекта узкую световую линию параллельно оси OY. Диффузно отраженный от объекта ОО световой поток создает в плоскости ПЗС-матрицы 44 двумерную систему изображений освещенных точек М объекта OO. Видеосигналы с выхода ПЗС-матрицы 44 поступают на усилитель 58, далее на видеокарту 57, которая преобразует эти сигналы в цифровые машинные коды. Последние подаются на персональный компьютер 56, который производит все необходимые вычислительные операции по определению координат Y и Z точек М, освещенных зондирующей световой линией в соответствии с приведенными выше формулами. В результате формируется цифровая двумерная модель профиля поверхности объекта OO. Для получения трехмерного цифрового рельефа необходимо произвести относительное сканирование объекта OO и измерителя по оси ОХ. Х-перемещение для движущихся объектов осуществляется самим фактом перемещения (ось ОХ направляется вдоль направления вектора перемещения). Например, при измерении толщины проката, при снятии профиля туннеля метро, железнодорожного пути, при измерении габаритов обрабатываемых деталей на металлорежущих станках и т.д.
Для неподвижных объектов Х-перемещение осуществляется с помощью однокоординатных столов (линейных или поворотных), которые являются низкодинамичными механическими системами, их максимальная скорость не превышает 100 ДХ/с, где ДХ - пространственный шаг по координате X, а частота съема информации с ПЗС-матрицы обычно не превышает Fo=100 Гц. Обычная скорость измерений составляет MY x fo ~ 105 точек/с и более, где MY - число строк в ПЗС-матрице. МY может достигать нескольких тысяч пикселей.
Сменные оптические клинья 37 и 38 с разными углами отклонения луча вводятся в оптическую схему устройства вручную или автоматически с помощью электромагнитных систем. Введение соответствующих оптических клиньев изменяет угол Ф и среднее значение длины L соответствующего диапазона измерений по координате Z. Тем самым расширяется суммарный измерительный диапазон. Предлагаемое устройство позволяет реализовать относительную точность измерения по координате Z в 10-4 (0,01% от диапазона измерений) и лучше. Такая точность необходима во многих практически значимых приложениях: в машиностроении, станкостроении, архитектуре и т.д.
Испытан макет предлагаемого бесконтактного трехкоординатного измерителя.
Предложенное техническое решение обеспечивает повышенную долговременную точность измерений и дешевле аналогичных устройств за счет уменьшения состава элементов, в частности ПЗС-матриц.
В настоящее время производится изготовление прибора для замеров геометрии турбинных лопаток с параметрами:
- диапазон измерений по оси Y (X) - 0-300 мм,
- погрешность измерений по оси Y (X) - 0,1 мм,
- диапазон измерений по оси Z - 0-300 мм,
- погрешность измерений по оси Z - 0,03 мм.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ ПРОФИЛЯ | 2008 |
|
RU2399024C2 |
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| ПРЕЦИЗИОННЫЙ ДАТЧИК РАССТОЯНИЙ | 2014 |
|
RU2567185C1 |
| СИСТЕМА КОНТРОЛЯ ИЗНОСА ВАГОННЫХ КОЛЕСНЫХ ПАР | 2003 |
|
RU2247319C1 |
| АБСОЛЮТНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА (ВАРИАНТЫ) | 2009 |
|
RU2419067C2 |
| ОДОМЕТР ДЛЯ ВНУТРИТРУБНОГО СНАРЯДА-ДЕФЕКТОСКОПА | 2004 |
|
RU2275598C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОСКОГО УГЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2451903C1 |
| СПОСОБ ИЗМЕРЕНИЯ СИСТЕМАТИЧЕСКИХ ПОГРЕШНОСТЕЙ УГЛОВЫХ ЭНКОДЕРОВ | 2014 |
|
RU2558000C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ОДОМЕТРАМИ | 2005 |
|
RU2306479C2 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С КОЛЕСНЫМИ ОДОМЕТРАМИ | 2007 |
|
RU2334980C1 |
Изобретение относится к измерительным устройствам, использующим оптические средства измерения, и может применяться в различных отраслях промышленности и хозяйственной деятельности для определения координат поверхности трехмерных объектов. Бесконтактный измеритель расстояний содержит формирующий зондирующую световую линию на поверхности объекта ОО измерения осветительный узел, двухканальную приемную проекционную систему, ПЗС-матрицу и преобразовательно-вычислительный блок, на вход которого включен выход ПЗС-матрицы. ПЗС-матрица установлена на оптической оси проекционного объектива двухканальной приемной проекционной системы, которая снабжена двумя пентапризмами и зеркально-призменным разделительным узлом. Технический результат: повышение абсолютной и относительной точности измерений. 3 з.п.ф-лы, 2 ил.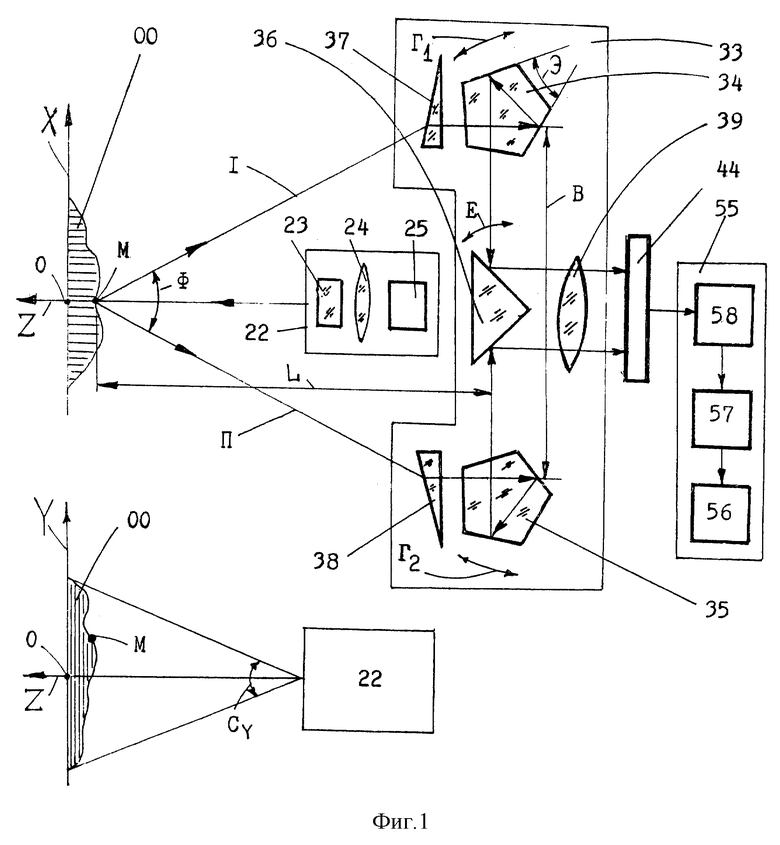
| БЕСКОНТАКТНЫЙ ИЗМЕРИТЕЛЬ РАССТОЯНИЙ | 1996 |
|
RU2124700C1 |
| US 5402364 А, 28.03.1995 | |||
| ЕР 0457281 А3, 21.11.1991. | |||

