ОБЛАСТЬ ТЕХНИКИ
Варианты осуществления изобретения, раскрытого здесь, в общем касаются способов и систем и, более конкретно, механизмов и способов демпфирования крутильного колебания, которое появляется во вращающейся системе.
ОБСУЖДЕНИЕ УРОВНЯ ТЕХНИКИ
В нефтегазовой промышленности имеется растущий спрос на управление различными машинами с переменными скоростями. Такие машины могут включать компрессоры, электрические двигатели, расширители, газовые турбины, насосы и т.д. Электрические приводы переменной частоты увеличивают энергетическую отдачу и обеспечивают машинам повышенную гибкость. Одним из возможных способов питания, например, большой установки для сжатия газа, является использование инвертора с естественной коммутацией (load commutated inverter, LCI). Однако проблемой систем питания с силовой электроникой является генерация пульсаций во вращающем моменте машины вследствие наличия электрических гармоник. Компонента пульсаций вращающего момента может взаимодействовать с механической системой на собственных частотах крутильных колебаний цепи привода, что является нежелательным.
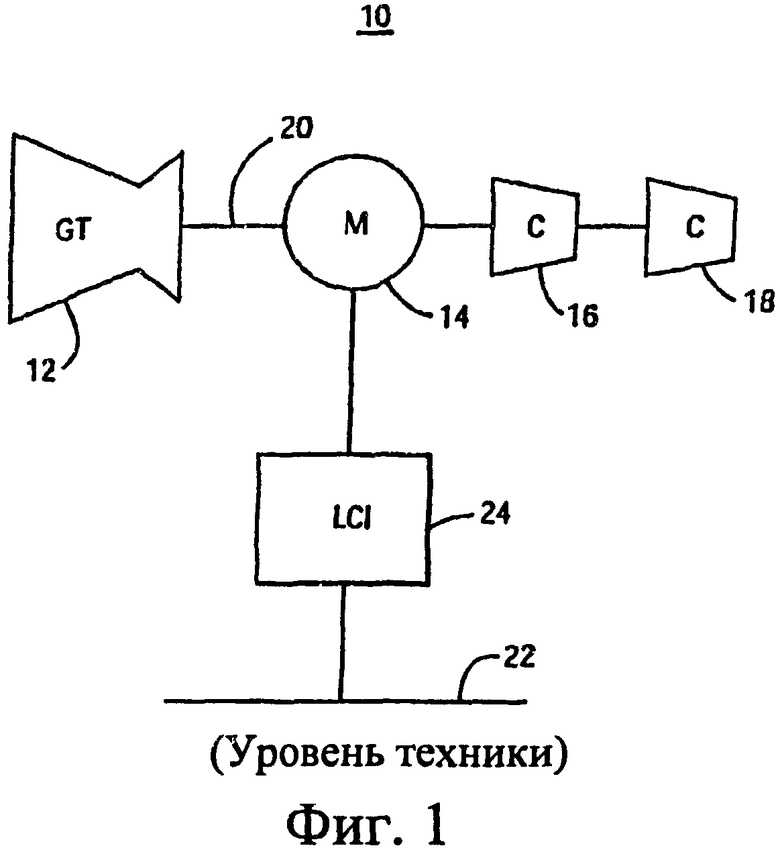
Крутильное колебание или вибрация является колебательным угловым движением, которое может появиться в валу, к которому присоединены различные массы, как показано, например, на фиг.1. Фиг.1 показывает систему 10, включающую газовую турбину 12, двигатель 14, первый компрессор 16 и второй компрессор 18. Валы этих машин связаны друг с другом, или единственный вал совместно используется всеми этими машинами. Из-за рабочих колес и других масс, распределенных вдоль вала 20, на вращение вала 20 могут воздействовать крутильные колебания, вызванные вращением масс (например, рабочих колес), прикрепленных к валу, с различными скоростями.
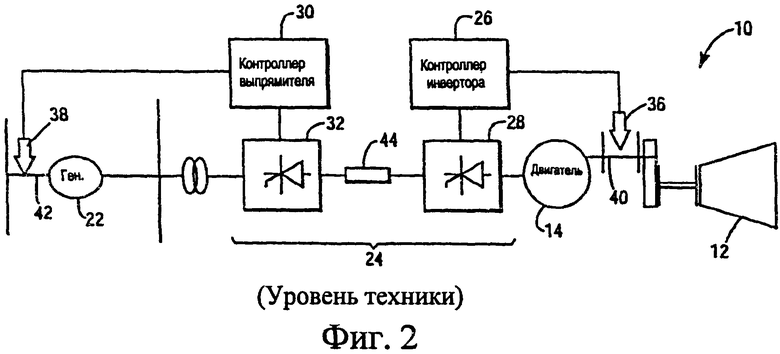
Как сказано выше, крутильные колебания, как правило, вводятся силовой электроникой, которая питает, например, двигатель. Фиг.1 показывает источник 22 энергии (генератор мощности) в виде энергосистемы, снабжающей электроэнергией LCI 24, который, в свою очередь, питает ротор 20 двигателя 14. Энергосистема может быть изолированным генератором мощности. Чтобы демпфировать (минимизировать) крутильные колебания, как показано на фиг.2 (соответствует фиг.1 патента США №7 173 399 того же самого заявителя, что и у данной заявки, при этом все описание указанного патента включено в данный документ путем ссылки), контроллер 26 инвертора может быть добавлен к инвертору 28 LCI 24, и он может быть выполнен с возможностью введения изменения (ЛР) угла задержки инвертора для модулирования величины активной мощности, передаваемой от инвертора 28 двигателю 14. Заметим, что термин "угол задержки" используется в литературе как синоним термина "угол зажигания". Поэтому указанные термины в данном описании имеют одно и то же значение и используются взаимозаменяемо. Это не зависит от того, о модуляции какого угла, альфа или бета, идет речь. Альтернативно, контроллер 30 выпрямителя может быть добавлен к выпрямителю 32 и может быть выполнен с возможностью введения изменения (Да) угла задержки выпрямителя для модулирования величины активной мощности, передаваемой от генератора 22 звену постоянного тока и, таким образом, двигателю 14. Путем модуляции величины активной мощности, передаваемой от генератора двигателю, можно демпфировать крутильные колебания.
Эти два контроллера 26 и 30 получают, в качестве входных сигналов, сигналы от датчиков 36 и 38, соответственно, и эти сигналы показывают вращающий момент, испытываемый двигателем 14 и/или генератором 22. Другими словами, контроллер 26 инвертора обрабатывает величину вращающего момента, считанную датчиком 36, чтобы генерировать изменение (Δβ) угла задержки инвертора, в то время как контроллер 30 выпрямителя обрабатывает величину вращающего момента, считанную датчиком 38, чтобы генерировать изменение (Δα) угла задержки выпрямителя. Контроллер 26 инвертора и контроллер 30 выпрямителя независимы друг от друга, и эти контроллеры могут быть реализованы в данной системе вместе или по отдельности, в зависимости от работы и системной чувствительности присоединенных цепей привода. Фиг.2 показывает, что датчик 36 контролирует часть (секцию) 40 вала двигателя 14, а датчик 38 контролирует вал 42 генератора 22 мощности. Фиг.2 также показывает звено 44 постоянного тока между выпрямителем 32 и инвертором 28.
Однако измерение механических характеристик, например, механического вращающего момента, приложенного к вращающемуся валу, может быть затратным или непрактичным для цепей приводов большой мощности. Иногда измерение механического вращающего момента невозможно, поскольку вал недоступен или окружен взрывоопасной атмосферой, такой как в приложениях для сжатия газа. Соответственно, было бы желательно создать системы и способы, которые позволяют избежать измерения механического вращающего момента, приложенного к вращающемуся валу.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно одному варианту осуществления изобретения, предлагается система контроллера для демпфирования крутильного колебания, соединенная с преобразователем, который питает электрическую машину, механически соединенную с цепью привода. Система контроллера включает входной интерфейс, конфигурированный для приема измеренных данных, связанных с переменными преобразователя или электрической машины, и контроллер, связанный с входным интерфейсом. Контроллер конфигурирован для вычисления по меньшей мере одной динамической компоненты вращающего момента вдоль секции вала цепи привода на основании данных, полученных от входного интерфейса, генерирования данных управления для преобразователя для демпфирования крутильного колебания в электрической машине на основании упомянутой по меньшей мере одной динамической компоненты вращающего момента и посылки данных управления в преобразователь для модулирования активной мощности, обмен которой осуществляется между преобразователем и электрической машиной.
Согласно другому варианту осуществления изобретения, предлагается система для питания электрической машины, механически соединенной с цепью привода. Система включает выпрямитель, конфигурированный для приема переменного тока от источника энергии и преобразования переменного тока в постоянный ток; звено постоянного тока, связанное с выпрямителем и выполненное с возможностью передачи постоянного тока; инвертор, связанный со звеном постоянного тока и выполненный с возможностью преобразования принятого постоянного тока в переменный ток; входной интерфейс, выполненный с возможностью приема измеренных данных, связанных с электрическими переменными звена постоянного тока или инвертора; и контроллер, связанный с входным интерфейсом. Контроллер конфигурирован для вычисления по меньшей мере одной динамической компоненты вращающего момента вдоль секции вала цепи привода на основании данных, полученных от входного интерфейса, генерирования данных управления для выпрямителя и/или инвертора для демпфирования крутильного колебания в электрической машине на основании упомянутой по меньшей мере одной динамической компоненты вращающего момента и посылки данных управления в выпрямитель и/или инвертор для модулирования активной мощности, обмен которой осуществляется между преобразователем и электрической машиной
Согласно варианту осуществления изобретения, предлагается также способ демпфирования крутильного колебания в электрической машине, механически соединенной с цепью привода. Способ включает прием измеренных данных, связанных с электрическими параметрами преобразователя, который питает электрическую машину; вычисление по меньшей мере одной динамической компоненты вращающего момента вдоль секции вала цепи привода на основании принятых данных, генерирование данных управления для преобразователя для демпфирования крутильного колебания на основании упомянутой по меньшей мере одной динамической компоненты вращающего момента и посылку данных управления в преобразователь для модулирования активной мощности, обмен которой осуществляется между преобразователем и электрической машиной.
Согласно еще одному варианту осуществления изобретения, предлагается машиночитаемый носитель, включающий машинные команды, выполняемые компьютером, которые при выполнении позволяют осуществить способ демпфирования крутильных колебаний, описанный в предыдущем абзаце.
Согласно еще одному варианту осуществления изобретения, предлагается система контроллера для демпфирования крутильного колебания, соединенная с преобразователем, который питает электрическую машину, механически соединенную с цепью "привода. Система контроллера включает входной интерфейс, конфигурированный для приема измеренных данных, связанных с механическими переменными турбомашины цепи привода, и контроллер, связанный с входным интерфейсом. Контроллер конфигурирован для вычисления по меньшей мере одной динамической компоненты вращающего момента вдоль секции вала цепи привода на основании данных, полученных от входного интерфейса, генерирования данных управления для преобразователя для демпфирования крутильного колебания в электрической машине на основании упомянутой по меньшей мере одной динамической компоненты вращающего момента и посылки данных управления в преобразователь для модулирования активной мощности, обмен которой осуществляется между преобразователем и электрической машиной.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопровождающие чертежи, которые включены в данное описание и составляют его часть, иллюстрируют один или более вариантов осуществления изобретения и, вместе с описанием, поясняют эти варианты осуществления изобретения. На чертежах:
фиг.1 является схемой обычной газовой турбины, связанной с электрической машиной и двумя компрессорами;
фиг.2 является схемой системы привода с переменной скоростью, связанной с электрической машиной и механической нагрузкой и включающей контроллер выпрямителя и контроллер преобразователя;
фиг.3 является схемой газовой турбины, двигателя и нагрузки, которыми управляет контроллер согласно варианту осуществления изобретения;
фиг.4 является схемой преобразователя и связанной с ним логики согласно варианту осуществления изобретения;
фиг.5 является схемой преобразователя и связанной с ним логики согласно варианту осуществления изобретения;
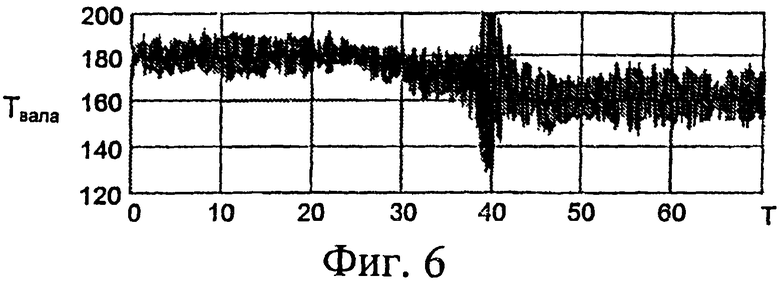
фиг.6 является графиком, иллюстрирующим вращающий момент вала с отключенным управлением демпфированием;
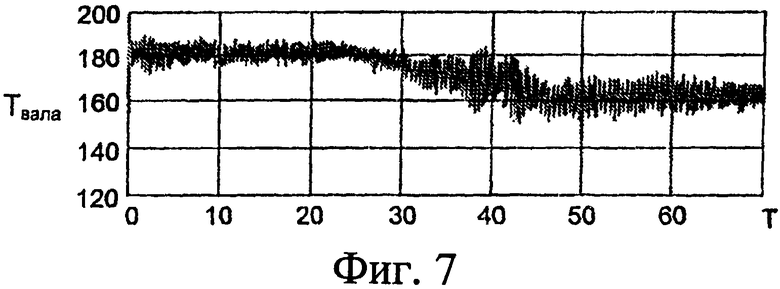
фиг.7 является графиком, иллюстрирующим вращающий момент вала с включенным управлением демпфированием согласно варианту осуществления изобретения;
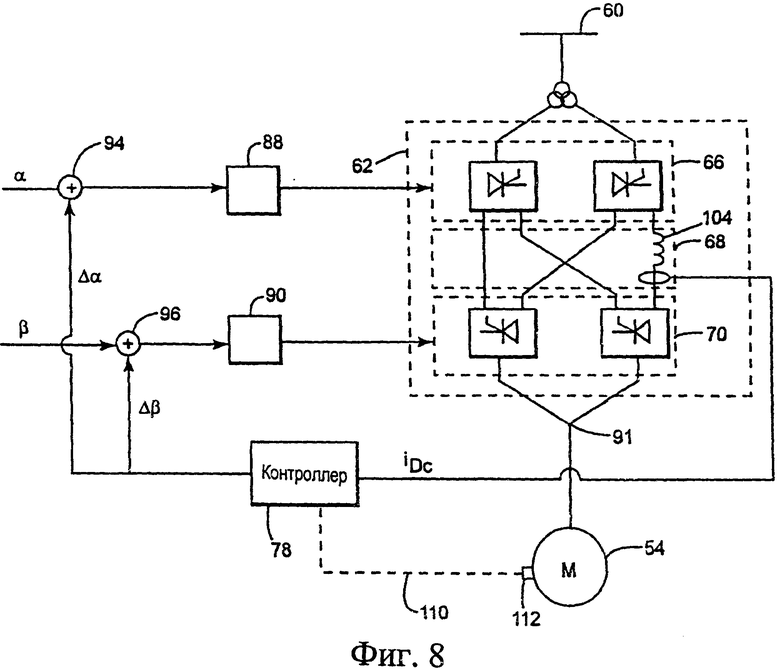
фиг.8 является схемой преобразователя и связанной с ним логики согласно варианту осуществления изобретения;
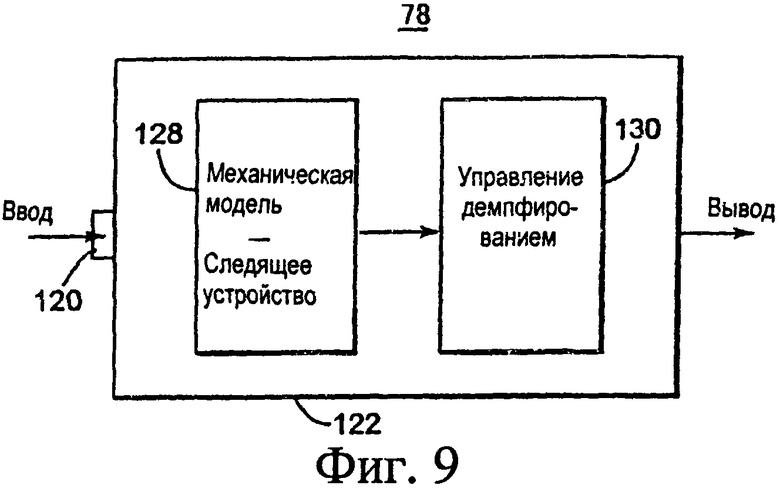
фиг.9 является схемой контроллера, конфигурированного для управления преобразователем для демпфирования крутильных колебаний согласно варианту осуществления изобретения;
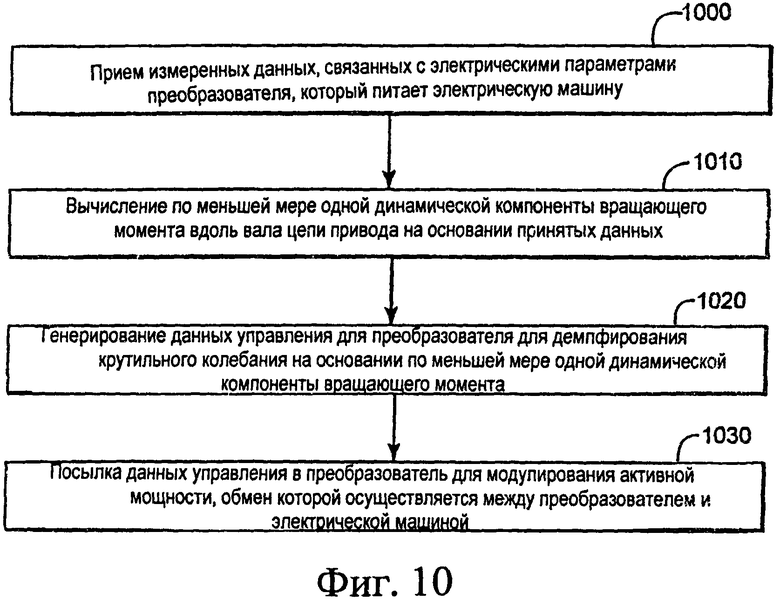
фиг.10 является блок-схемой способа демпфирования крутильных колебаний согласно варианту осуществления изобретения;
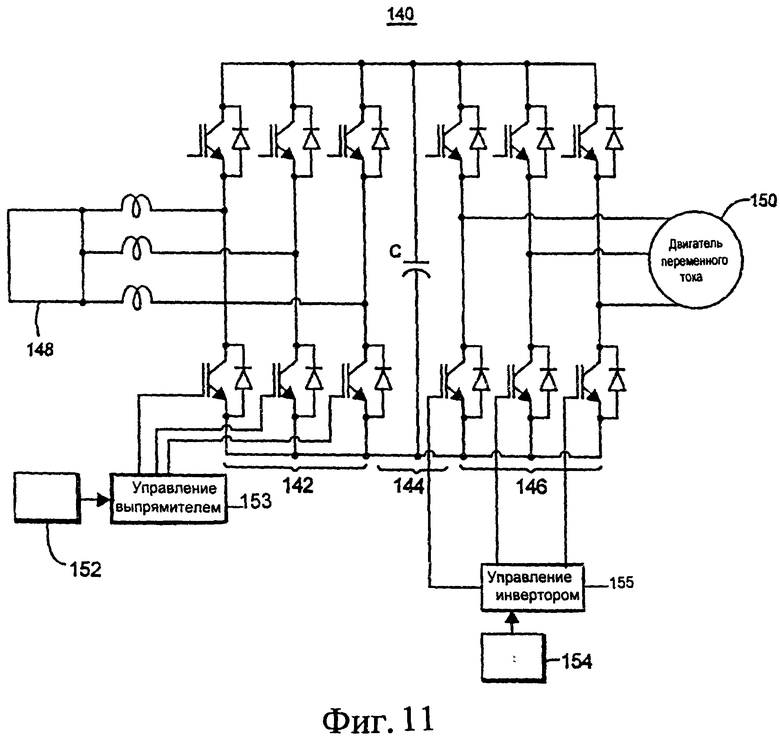
фиг.11 является схемой инвертора в виде источника напряжения и связанного с ним контроллера для демпфирования крутильных колебаний согласно варианту осуществления изобретения; и
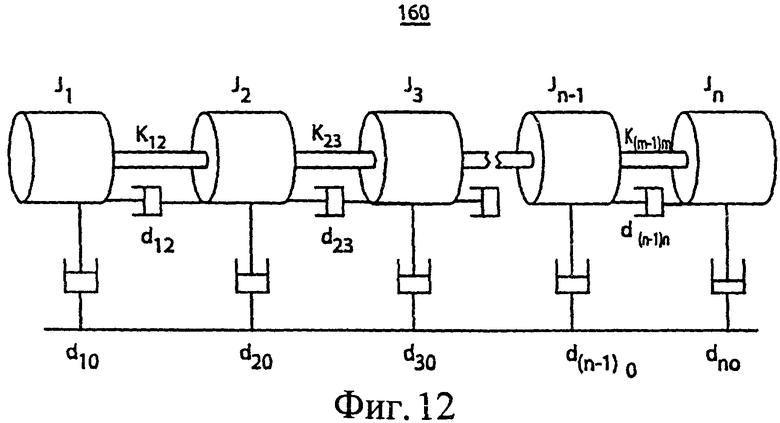
фиг.12 является схемой мультимассовой системы.
ПОДРОБНОЕ ОПИСАНИЕ
Следующее описание вариантов осуществления изобретения включает ссылки на сопровождающие чертежи. Одинаковые номера ссылок на различных чертежах идентифицируют одинаковые или подобные элементы. Следующее подробное описание не ограничивает изобретение. Вместо этого, рамки изобретения определяются приложенной формулой изобретения. Следующие варианты осуществления изобретения обсуждаются, для простоты, в отношении терминологии и структуры электрического двигателя с питанием от инвертора с естественной коммутацией. Однако варианты осуществления изобретения, которые будут обсуждаться ниже, не ограничиваются такой системой, и могут быть применены (с соответствующими необходимыми изменениями) к другим системам, которые приводятся в действие другими устройствами, например, инвертором в виде источника напряжения (VSI).
Ссылка по всему описанию на "один вариант осуществления изобретения" или "вариант осуществления изобретения" означает, что конкретный признак, конструкция или характеристика, описанная в связи с некоторым вариантом осуществления изобретения, включены по меньшей мере в один вариант осуществления раскрытого изобретения. Таким образом, появление фраз "в одном варианте осуществления изобретения" или "в варианте осуществления изобретения" в различных местах по всему описанию не обязательно относится к одному и тому же варианту осуществления изобретения. Далее, конкретные признаки, конструкции или характеристики могут быть комбинированы любым соответствующим путем в одном или более вариантах осуществления изобретения.
Согласно варианту осуществления изобретения, контроллер для демпфирования крутильного колебания может быть конфигурирован для получения информации посредством электрических измерений, вместо вала электрической машины (которая может быть двигателем или генератором), и для оценки, на основании этой информации, полученной из электрических измерений, колебаний вращающего момента в желаемом месте вала восприимчивой цепи привода. Колебания вращающего момента могут быть динамическими компонентами вращающего момента, угла поворота, скорости вращения или вращательного ускорения вала. Другими словами, согласно этому варианту осуществления изобретения, отсутствуют датчики, которые непосредственно контролируют динамические компоненты вращающего момента в заданных местах вала восприимчивой цепи привода. Как будет рассмотрено ниже, в преобразователе имеются различные места, из которых может быть получена информация для контроллера.
Согласно варианту осуществления изобретения, показанному на фиг.3, система 50 включает газовую турбину 52, двигатель 54 и нагрузку 56. Другие конфигурации, включающие множество газовых турбин и множество компрессоров в качестве нагрузки 56, также возможны. Также другие конфигурации могут включать один или более расширителей, один или более генераторов мощности или другие машины, имеющие вращающуюся деталь, например, воздушные турбины, коробки передач. Система, показанная на фиг.3, является иллюстративной и упрощена для лучшего понимания новых признаков. Однако специалисту будет понятно, что другие системы, имеющие больше или меньше компонентов, могут быть адаптированы для включения в них рассматриваемых здесь новых признаков.
Нагрузка 56 может включать один или более компрессоров или другие машины, используемые в нефтегазовой промышленности. Присоединение различных масс (связанных с роторами и рабочими колесами машин) к валу 58 делает систему 50 склонной к потенциальным крутильным колебаниям. Эти крутильные колебания могут вызывать скручивание вала 58, что может привести к существенному уменьшению срока службы или даже разрушению системы вала (которая может включать не только вал или валы, но также соединительные муфты и коробку передач, в зависимости от конкретной ситуации). Варианты осуществления изобретения обеспечивают механизм для уменьшения крутильных колебаний.
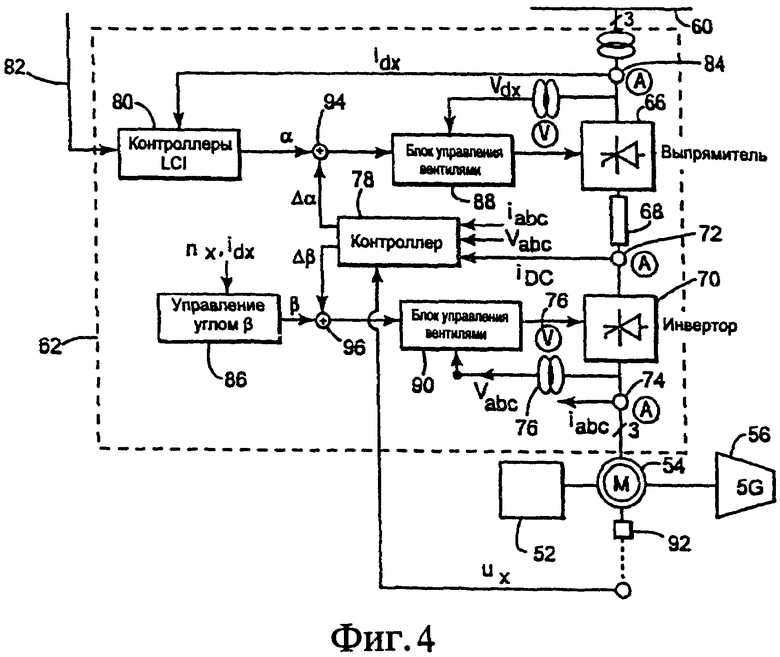
Для приведения двигателя 54 в движение электроэнергия подается от энергосистемы или локального генератора 60, в случае изолированной или подобной ей системы питания. Чтобы приводить двигатель 54 в движение с переменной скоростью, инвертор с естественной коммутацией (LCI) 62 включен между сетью 60 и двигателем 54. Как показано на фиг.4, LCI 62 включает выпрямитель 66, связанный со звеном 68 постоянного тока, которое связано с инвертором 70. Выпрямитель 66, звено 68 постоянного тока и инвертор 70 известны в данной области техники, и их конкретные структуры далее не обсуждаются. Как отмечено выше, новые признаки могут быть применены, с соответствующими изменениями, к системам VSI. Только для иллюстрации, пример VSI показан и кратко обсуждается в отношении фиг.11. Фиг.4 указывает, что ток и напряжение, получаемые от сети 60, являются трехфазным током и напряжением, соответственно. То же самое верно для токов и напряжений в выпрямителе, инверторе и двигателе, и этот факт обозначен на фиг.4 символом 73". Однако новые признаки вариантов осуществления изобретения применимы и к системам, конфигурированным для работы более чем с тремя фазами, например, к 6-фазным и 12-фазным системам.
LCI 62 также включает датчики тока и напряжения, обозначенные заключенными в кружки буквами А и V на фиг.4. Например, датчик 72 тока имеется в звене 68 постоянного тока для измерения силы тока ioc-Альтернативно, ток в звене постоянного тока оценивается на основании измерений, выполненных на стороне переменного тока, например датчиками 84 или 74 тока, поскольку эти датчики менее дороги, чем датчики постоянного тока. Другим примером является датчик 74 тока, который измеряет ток iabc, подаваемый инвертором 70 к двигателю 54, и датчик 76 напряжения, который измеряет напряжение vat>c, подаваемое инвертором 70 на двигатель 54. Заметим, что эти токи и напряжения подают как входные сигналы в контроллер 78. Термин "контроллер" используется здесь как охватывающий любые подходящие цифровые, аналоговые или комбинированные электрические схемы или блоки обработки для осуществления требуемой управляющей функции. Возвращаясь к фиг.3, заметим, что контроллер 78 может быть частью LCI 62 или может быть автономным контроллером, осуществляющим обмен сигналами с LCI 62. Контроллер 78 может быть контроллером, предназначенным для подавления крутильных колебаний.
Фиг.4 также показывает, что контроллер 80 LCI генерирует, на основании различных опорных сигналов 82 и тока idx, принятого от датчика 84, угол а задержки выпрямителя для управления выпрямителем 66. Другой контроллер 86 может использоваться для того, чтобы генерировать угол р задержки инвертора для инвертора 70. Также фиг.4 показывает блок 88 управления вентилями для выпрямителя 66 и блок 90 управления вентилями для инвертора 70, которые непосредственно управляют выпрямителем и инвертором на основании информации, полученной от контроллеров 80 и 86.
Опциональный датчик 92 может быть расположен в непосредственной близости от вала двигателя 54, чтобы обнаруживать динамические компоненты вращающего момента, например, вращающий момент, имеющийся на валу, или угловое положение вала, или скорость вращения вала, или вращательное ускорение вала. Информация nx относительно измеренных динамических компонент вращающего момента может быть предоставлена контроллерам 78, 80 и 86. Фиг.4 также показывает блоки 94 и 96 суммирования, которые добавляют сигнал контроллера 78 к сигналам, генерируемым контроллерами 80 и 86.
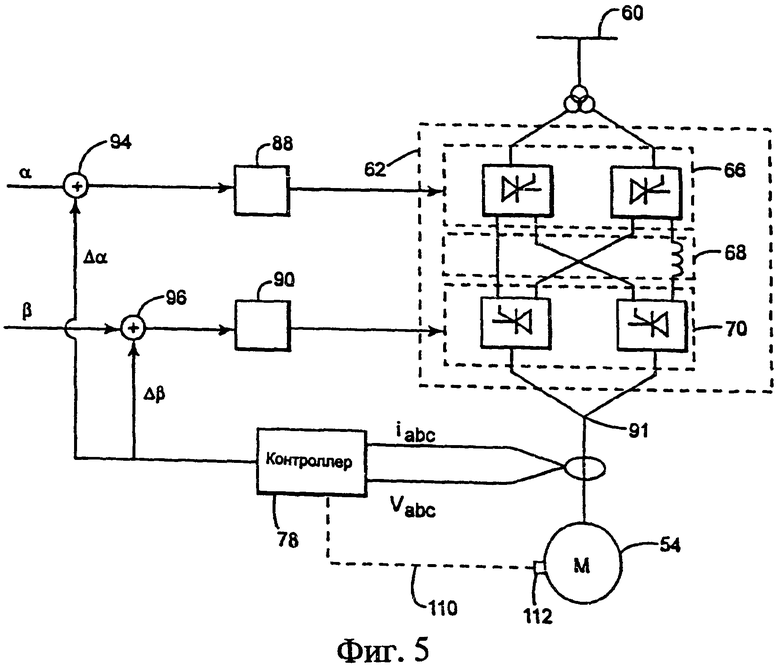
Согласно варианту осуществления изобретения, поясняемому на фиг.5, контроллер 78 для демпфирования крутильного колебания может получать значения тока iabc и напряжения vabc, измеренные на выходе 91 LCI 62 или инвертора 70. На основании этих величин (без информации об измеренных вращающем моменте или скорости или ускорении вала двигателя), вычисляется электромагнитный момент для двигателя и вводится в механическую модель системы. Механическая модель системы может быть представлена несколькими дифференциальными уравнениями, представляющими динамическое поведение механической системы и связывающими электрические параметры с механическими параметрами системы. Модельное представление включает, например, оцененные величины инерции, затухания и жесткости (которые могут быть проверены* при полевых измерениях) и позволяет вычислять динамическое поведение вала, например, крутильные колебания. Необходимая для демпфирования крутильного колебания точность может быть достигнута, поскольку для демпфирования крутильного колебания важна, главным образом, точность фазы динамической компоненты вращающего момента, а амплитудная информация или абсолютная величина вращающего момента менее важны.
В связи с этим заметим, что электромагнитный момент электрической машины является связью между электрической и механической системой цепи привода. Все гармоники и интергармоники в электрической системе также видны в электромагнитном моменте. Интергармоники на частоте собственных колебаний механической системы могут возбудить крутильные колебания и потенциально привести к динамическим величинам вращающего момента в механической системе, превышающим допустимые для вала значения. Существующие системы демпфирования крутильных колебаний могут противодействовать таким крутильным колебаниям, но эти системы нуждаются в сигнале, представляющем динамический вращающий момент механического вала и поступающем от датчика, который эффективно контролирует, например, вал двигателя или компоненты вала двигателя, такие как зубчатые колеса, установленные вдоль вала двигателя. Согласно иллюстративным вариантам осуществления изобретения, нет необходимости в таком сигнале, поскольку динамические компоненты вращающего момента оценивают на основании электрических измерений. Однако, как будет сказано ниже, некоторые иллюстративные варианты осуществления изобретения касаются ситуаций, в которых доступные механические измерения в других компонентах системы, например, в газовой турбине, могут использоваться для определения динамических компонент вращающего момента вала двигателя.
Другими словами, преимуществом варианта осуществления изобретения является демпфирование крутильного колебания без потребности обнаружения крутильного колебания датчиком в механической системе. Таким образом, демпфирование крутильного колебания может быть применено без необходимости устанавливать дополнительные датчики в электрической или механической системе, тогда как датчики тока-напряжения и/или датчики тока и/или датчики скорости могут быть доступны при сравнительно низкой стоимости. В этом отношении заметим, что механические датчики для измерения вращающего момента дороги для приложений большой мощности, и иногда эти датчики не могут быть добавлены к существующим системам. Таким образом, существующие решения для демпфирования крутильного колебания не могут быть осуществлены для таких случаев, когда существующие системы демпфирования крутильного колебания требуют наличия датчика, чтобы измерить сигнал, представляющий механический параметр системы, который указывает вращающий момент. Напротив, подход иллюстративного варианта осуществления изобретения, показанный на фиг.5, надежен, экономически выгоден и позволяет модифицировать существующую систему.
После приема тока и напряжения, показанных на фиг.5, контроллер 78 может генерировать соответствующие сигналы (одного или более из углов Δα и Δβ для того, чтобы управлять углом α задержки выпрямителя и/или углом β задержки инвертора. Таким образом, согласно варианту осуществления изобретения, показанному на фиг.5, контроллер 78 получает с выхода 91 инвертора 70 входную электрическую информацию для вычисления различных углов задержки, основываясь, например, на принципе демпфирования, описанном в патенте США №7173399. Как поясняется на фиг.5, этот иллюстративный вариант осуществления изобретения использует незамкнутый контур регулирования, поскольку коррекции различных углов не регулируются / не проверяются на основе измеренного сигнала (обратной связи) от механической цепи привода, связанной с двигателем 54. Далее, выполненное моделирование показывает уменьшение крутильных колебаний, когда контроллер 78 приведен в действие. Фиг.6 показывает колебания 100 вращающего момента вала двигателя 54 в зависимости от времени, когда контроллер 78 заблокирован, а фиг.7 показывает, как те же самые колебания уменьшаются, когда контроллер 78 приведен в действие, например, в момент времени 40 с, в то время как механическая цепь привода работает с переменной скоростью и пересекает в момент времени t=40 с критическую скорость. Оба графика показывают моделируемый вращающий момент по оси Y в зависимости от времени, показанного по оси X.
Согласно другому варианту осуществления изобретения, поясняемому на фиг.8, контроллер 78 может быть конфигурирован для вычисления одного или более из изменений углов задержки Δα и/или Δβ на основании электрических величин, полученных от звена 68 постоянного тока. Заметим, что хотя фиг.8 показывает единственное звено 68 постоянного тока, существуют конфигурации, которые используют множество звеньев постоянного тока между выпрямителями и инверторами, и одно или более из этих звеньев постоянного тока может быть измерено, и результаты этого измерения могут быть поданы в контроллер 78. Более конкретно, ток iDC может быть измерен в катушке 104 индуктивности звена 68 постоянного тока, и эта величина может быть предоставлена контроллеру 78. В одном приложении только единственное измерение тока используется для подачи в контроллер 78. Основываясь на измеренной величине тока и механической модели системы, контроллер 78 может генерировать вышеупомянутые изменения угла задержки. Согласно другому варианту осуществления изобретения, постоянный ток iDC может быть оценен на основании измерений тока и/или напряжения, выполненных в выпрямителе 66 или инверторе 70.
Изменения угла задержки, вычисленные контроллером 78 в любом из вариантов осуществления изобретения, рассмотренных в отношении фиг.5 и 8, могут модифицироваться на основании конфигурации с замкнутым контуром регулирования. Конфигурация замкнутого контура поясняется штриховой линией 110 на фиг.8, которая показывает, что угловая скорость вала двигателя 54 может быть определена соответствующим датчиком 112, и эта величина может быть предоставлена контроллеру 78. На основании этой информации точность модели может быть улучшена посредством обратной связи от механической системы, например, путем использования существующих измерений скорости с высокой разрешающей способностью (классическое средство слежения). Качество измерения скорости может быть еще более улучшено путем использования алгоритма адаптивного фильтра. В одном приложении датчик 112 может измерять другой параметр вала двигателя 54, например, девиацию угла вращения в соединительной муфте двигателя.
Заметим, что рассмотренные выше варианты конструкции могут модифицироваться так, что механические данные вместо электрических данных измеряются и подаются контроллеру 78. Альтернативно, могут быть измерены как механические, так и электрические данные. Для этих ситуаций механические данные могут быть измерены вдоль вала цепи привода, к которой соединен электрический двигатель. Механические данные могут быть измерены в электрическом двигателе или могут быть измерены вне электрического двигателя, например, в газовой турбине.
Конструкция контроллера 78 рассматривается теперь со ссылкой на фиг.9. Согласно варианту осуществления изобретения, контроллер 78 может включать входной интерфейс 120, который связан с одним элементом 122 из процессора, аналоговой электрической схемы, переконфигурируемой платы FPGA и т.д. Элемент 122 конфигурирован для приема электрических параметров от LCI 62 и вычисления изменений угла задержки. Элемент 122 может быть конфигурирован для хранения механической модели 128 и для ввода результатов электрических и/или механических измерений, принятых входным интерфейсом 120, в механическую модель 128 для вычисления одной или более динамических компонент вращающего момента. На основании одной или более из динамических компонент вращающего момента, сигналы управления демпфированием генерируются в устройстве управления демпфированием, и затем выходной сигнал посылается блоку суммирования и блоку управления вентилями. Согласно другому варианту осуществления изобретения, контроллер 78 может быть аналоговой схемой, переконфигурируемой платой FPGA или другой специализированной электрической схемой для определения изменений угла задержки..
В одном иллюстративном варианте осуществления изобретения контроллер 78 непрерывно получает результаты электрических измерений от различных датчиков тока и напряжения и непрерывно вычисляет сигналы демпфирования крутильных колебаний, основываясь на динамических компонентах вращающего момента, вычисленных на основании электрических измерений. Согласно этому варианту осуществления изобретения, контроллер не определяет, присутствуют ли крутильные колебания в валу, а вместо этого непрерывно вычисляет сигналы демпфирования крутильных колебаний, основываясь на расчетной динамической величине вращающего момента. Однако, если нет никаких крутильных колебаний, то сигналы демпфирования крутильных колебаний, генерируемые контроллером и посылаемые в инвертор и/или выпрямитель, не оказывают воздействия на инвертор и/или выпрямитель, то есть изменения углов, обеспечиваемые сигналами демпфирования, являются пренебрежимо малыми. Таким образом, согласно этому варианту осуществления изобретения, сигналы воздействуют на инвертор и/или выпрямитель только тогда, когда существуют крутильные колебания.
Согласно варианту осуществления изобретения, поясняемому на фиг.10, предлагается способ демпфирования крутильного колебания в машине, соединенной с двигателем. Способ включает шаг 1000 приема измеренных данных, связанных с электрическими параметрами преобразователя, который питает электрическую машину, шаг 1010 вычисления по меньшей мере одной динамической компоненты вращающего момента вдоль вала цепи привода на основании принятых данных, шаг 1020 генерирования данных управления для преобразователя для демпфирования крутильного колебания на основании упомянутой по меньшей мере одной динамической компоненты вращающего момента и шаг 1030 посылки данных управления в преобразователь для модулирования активной мощности, обмен которой осуществляется между преобразователем и электрической машиной. Заметим, что выражение "модулирование активной мощности" применимо, даже если средняя активная мощность за период времени равна нулю, то есть в течение этого периода времени имеется по меньшей мере некоторый момент, когда активная мощность модулируется.
Согласно варианту осуществления изобретения, поясняемому на фиг.11, VSI 140 включает выпрямитель 142, звено 144 постоянного тока и инвертор 146, соединенные друг с другом в указанном порядке. Выпрямитель 142 получает напряжение сети от источника 148 энергии и может включать, например, диодный мост или активный входной модуль на полупроводниковых устройствах с внутренней коммутацией. Постоянное напряжение, формируемое выпрямителем 142, фильтруется и сглаживается конденсатором С в звене 144 постоянного тока. Фильтрованное постоянное напряжение затем подается в инвертор 146, который может включать полупроводниковые устройства с внутренней коммутацией, например, биполярные транзисторы с изолированным затвором (IGBT), которые генерируют переменное напряжение, прикладываемое к двигателю 150/Для выпрямителя 142 и инвертора 146 могут быть добавлены контроллеры 152 и 154, в дополнение к контроллерам выпрямителя и инвертора, или контроллеры 152 и 154 могут быть интегрированы с контроллерами выпрямителя и инвертора, для демпфирования крутильных колебаний вала двигателя 150. Контроллер 153 выпрямителя и контроллер 155 инвертора показаны связанными с некоторыми из полупроводниковых устройств, но нужно понимать, что все полупроводниковые устройства могут быть связаны с контроллерами. Контроллеры 152 и 154 могут быть реализованы вместе или по одному и конфигурированы для определения динамических компонент вращающего момента на основании электрических измерений, как рассматривалось со ссылкой на фиг.4 и 5, и для влияния на управляющие опорные сигналы встроенного управления выпрямителя и инвертора, например, опорный сигнал управления вращающим моментом или током.
Согласно варианту осуществления изобретения, поясняемому на фиг.12, обобщенная мультимассовая система 160 может включать "n" различных масс, имеющих соответствующие моменты инерции J1-Jn. Например, первая масса может соответствовать газовой турбине, вторая масса может соответствовать компрессору и так далее, в то время как последняя масса может соответствовать электрическому двигателю. Предположим, что вал электрического двигателя не доступен для механических измерений, например, измерений углового положения, скорости, ускорения или вращающего момента. Далее, предположим, что вал газовой турбины доступен, и один из вышеупомянутых механических параметров может быть непосредственно измерен в газовой турбине. В этом отношении заметим, что обычно газовая турбина имеет высокоточные датчики, которые измеряют различные механические переменные, чтобы предохранять газовую турбину от возможных повреждений. Напротив, обычный двигатель не имеет таких датчиков или, даже если некоторые датчики присутствуют, точность их измерений мала.
Дифференциальное уравнение механической системы в целом:
J(dθ2/dt2)+D(dθ/dt)+Кθ=Text,
где J (матрица кручения), D (матрица демпфирования) и K (матрица крутильной жесткости) - матрицы, связывающие характеристики первой массы (например, d10, d12, k12, J1) с характеристиками других масс, a Text - внешний (чистый) вращающий момент, приложенный к системе, например, двигателем. На основании этой модели механической системы вращающий момент или другая динамическая компонента вращающего момента "n" масс может быть определена, если характеристики, например первая масса, известны. Другими словами, высокоточные датчики, имеющиеся в газовой турбине, могут использоваться для измерения по меньшей мере одного параметра из углового положения, скорости, ускорения или вращающего момента вала газовой турбины. На основании этой измеренной величины динамическая компонента вращающего момента двигателя ("n" масс) или другой секции цепи привода может быть вычислена процессором или контроллером 78 системы и, таким образом, данные управления могут генерироваться для инвертора или выпрямителя, как уже рассмотрено выше.
Другими словами, согласно этому варианту осуществления изобретения, контроллер 78 нуждается в получении соответствующей механической информации от одной турбомашины, которая связана с двигателем, и на основании этой соответствующей механической информации контроллер в состоянии управлять преобразователем с целью генерирования вращающего момента в двигателе для демпфирования крутильного колебания. Турбомашиной может быть не только газовая, турбина, но также и компрессор, расширитель или другие известные машины. В одном приложении никакие электрические измерения не требуются для того, чтобы выполнить демпфирование. Однако электрические измерения могут быть комбинированы с механическими измерениями, чтобы достигнуть демпфирования. В одном приложении машина, которая применяет демпфирование (демпфирующая машина), недоступна для механических измерений, и динамическая компонента вращающего момента демпфирующей машины вычисляется на основании механических измерений, выполненных на другой машине, которая механически связана с демпфирующей машиной.
Раскрытые иллюстративные варианты осуществления изобретения представляют систему и способ демпфирования крутильных колебаний. Нужно понимать, что это описание не предназначено для ограничения изобретения. Напротив, иллюстративные варианты осуществления изобретения подразумевают охват альтернатив, модификаций и эквивалентов, которые включены в объем изобретения, определенный приложенной формулой изобретения. Также в подробном описании иллюстративных вариантов осуществления изобретения описаны многочисленные конкретные детали, чтобы обеспечить всестороннее понимание заявленного изобретения. Однако специалисту будет понятно, что различные варианты осуществления изобретения могут быть осуществлены без таких конкретных деталей.
Хотя признаки и элементы представленных иллюстративных вариантов осуществления изобретения описаны в вариантах осуществления изобретения в конкретных комбинациях, каждый признак или элемент могут использоваться отдельно, без других признаков и элементов вариантов осуществления изобретения, или в различных комбинациях с другими признаками и элементами, раскрытыми здесь, или без них.
В этом описании использованы примеры осуществления изобретения, раскрываемого так, чтобы позволить любому специалисту в данной области техники осуществить его на практике, включая создание и использование любых устройств или систем и выполнение любых связанных с ними способов. Объем изобретения определяется формулой изобретения и может включать другие примеры, которые могут быть предложены специалистами. Такие другие примеры также находятся в рамках формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ ПРИВОДА С ПЕРЕМЕННОЙ СКОРОСТЬЮ, СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ПРИВОДА С ПЕРЕМЕННОЙ СКОРОСТЬЮ И СПОСОБ ОХЛАЖДЕНИЯ ПОТОКА УГЛЕВОДОРОДОВ | 2013 |
|
RU2642827C2 |
| СУДОВАЯ ВАЛОГЕНЕРАТОРНАЯ УСТАНОВКА | 2013 |
|
RU2535768C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА | 1997 |
|
RU2110435C1 |
| УСТРОЙСТВО ГАШЕНИЯ КРУТИЛЬНЫХ КОЛЕБАНИЙ И ЦЕПЬ СЖАТИЯ | 2009 |
|
RU2514977C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2017 |
|
RU2643903C1 |
| СИЛОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2006 |
|
RU2408971C2 |
| ПРЕДОТВРАЩЕНИЕ ВОЗБУЖДЕНИЯ КРУТИЛЬНЫХ КОЛЕБАНИЙ В УПРАВЛЯЕМЫХ ПРЕОБРАЗОВАТЕЛЕМ ВЕТВЯХ КОМПРЕССОРОВ | 2011 |
|
RU2567871C2 |
| СИСТЕМА С ДВОЙНЫМ ШЕСТЕРЕНЧАТЫМ ПРИВОДОМ | 2011 |
|
RU2540828C2 |
| СИСТЕМА СТАРТЕР-ГЕНЕРАТОР ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2510796C1 |
| СИСТЕМА С ПЕРВЫМ И ВТОРЫМ ЭЛЕКТРОДВИГАТЕЛЯМИ ДЛЯ ПРИВОДА ЕЕ ЗВЕНА | 2013 |
|
RU2638319C2 |
Изобретение относится к области электротехники и может быть использовано для демпфирования крутильных колебаний во вращающейся системе. Технический результат - осуществление демпфирования колебаний без использования датчиков вращающегося момента. Система контроллера для демпфирования крутильного колебания соединена с преобразователем, который питает электрическую машину, соединенную с цепью привода, и содержит входной интерфейс, конфигурированный для приема измеренных данных, связанных с переменными преобразователя или электрической машины, и контроллер, связанный с входным интерфейсом. Контроллер вычисляет по меньшей мере одну динамическую компоненту вращающего момента вдоль секции вала цепи привода на основании данных, полученных от входного интерфейса, генерирует данные управления для преобразователя для демпфирования крутильного колебания в механической цепи привода на основании упомянутой по меньшей мере одной динамической компоненты вращающего момента и посылает данные управления в преобразователь для модулирования активной мощности, обмен которой осуществляется между преобразователем и электрической машиной. 4 н. и 6 з.п. ф-лы, 12 ил.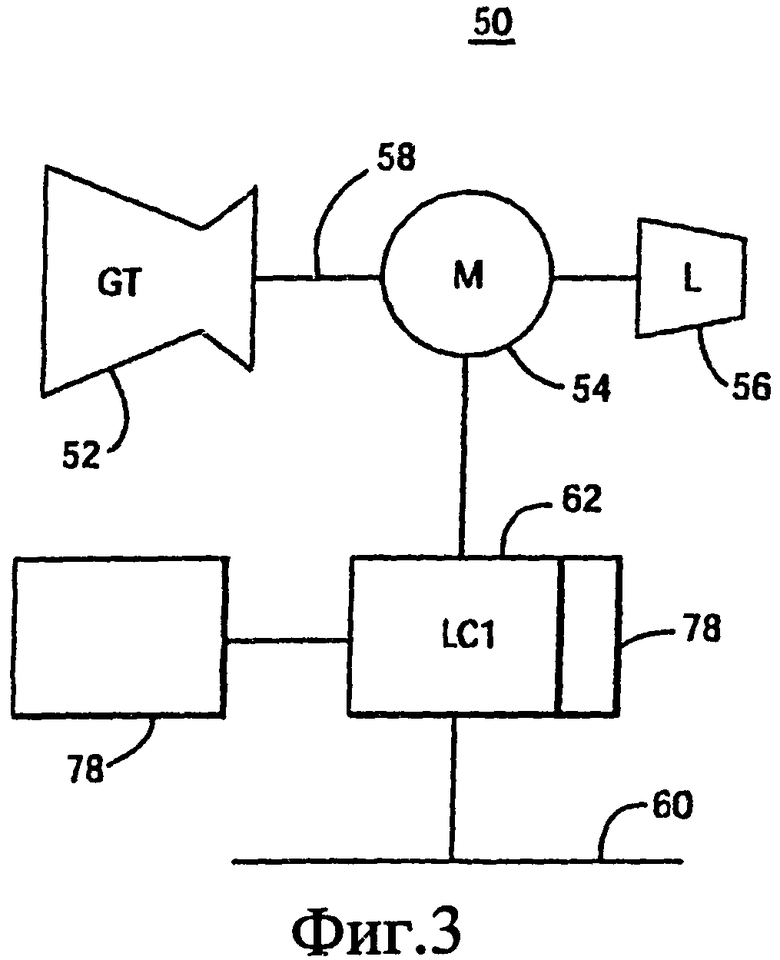
1. Система контроллера для демпфирования крутильного колебания, связанная с преобразователем, питающим электрическую машину, механически соединенную с цепью привода, при этом система контроллера включает:
входной интерфейс для приема измеренных данных, связанных с переменными преобразователя или электрической машины; и
контроллер, связанный с входным интерфейсом и выполненный с возможностью:
вычисления по меньшей мере одной динамической компоненты вращающего момента вдоль секции вала цепи привода на основании данных, полученных от входного интерфейса, с использованием механической модели, содержащей по меньшей мере одно из значения инерции, значения затухания и значения жесткости;
генерирования данных управления для преобразователя для демпфирования крутильного колебания в механической цепи привода на основании упомянутой по меньшей мере одной динамической компоненты вращающего момента и
посылки данных управления в преобразователь для модулирования активной мощности, обмен которой осуществляется между преобразователем и электрической машиной.
2. Система контроллера по п. 1, в которой генерируемые данные управления конфигурированы для изменения угла задержки выпрямителя, который является частью преобразователя.
3. Система контроллера по п. 1, в которой генерируемые данные управления конфигурированы для изменения угла задержки инвертора, который является частью преобразователя.
4. Система контроллера по любому из пп. 1-3, в которой принятые данные указывают ток и напряжение, подаваемые преобразователем на электрическую машину.
5. Система контроллера по любому из пп. 1-3, в которой принятые данные указывают ток в звене постоянного тока между выпрямителем и инвертором преобразователя.
6. Система контроллера по любому из пп. 1-3, в которой принятые данные указывают угловое положение, скорость, ускорение или вращающий момент электрической машины, а генерируемые данные управления конфигурированы для изменения угла задержки инвертора или угла задержки выпрямителя, который является частью преобразователя.
7. Система контроллера по любому из пп. 1-3, в которой контроллер выполнен с возможностью:
принимать данные обратной связи, указывающие угловое положение, скорость, ускорение или вращающий момент электрической машины; и
определять данные управления для преобразователя для демпфирования крутильного колебания на основании принятых данных, указывающих электрические переменные преобразователя, и данных обратной связи, указывающих угловое положение, скорость, ускорение или вращающий момент механической цепи привода.
8. Система для питания электрической машины, механически соединенной с цепью привода, включающая:
выпрямитель, выполненный с возможностью получать переменный ток от источника энергии и преобразовывать переменный ток в постоянный ток;
звено постоянного тока, связанное с выпрямителем и выполненное с возможностью передачи постоянного тока;
инвертор, связанный со звеном постоянного тока и выполненный с возможностью преобразования принятого постоянного тока в переменный ток;
входной интерфейс для приема измеренных данных, связанных с электрическими переменными звена постоянного тока или инвертора; и
контроллер, связанный с входным интерфейсом и выполненный с возможностью: вычисления по меньшей мере одной динамической компоненты вращающего момента вдоль секции вала цепи привода на основании данных, полученных от входного интерфейса, с использованием механической модели, содержащей по меньшей мере одно из значения инерции, значения затухания и значения жесткости;
генерирования данных управления для преобразователя и/или инвертора для демпфирования крутильного колебания в механической цепи привода на основании упомянутой по меньшей мере одной динамической компоненты вращающего момента и
посылки данных управления в выпрямитель и/или инвертор для модулирования активной мощности, обмен которой осуществляется между инвертором и электрической машиной.
9. Способ демпфирования крутильного колебания в электрической машине, механически соединенной с цепью привода, включающий:
прием измеренных данных, связанных с электрическими переменными преобразователя, который питает электрическую машину;
вычисление по меньшей мере одной динамической компоненты вращающего момента вдоль секции вала цепи привода на основании принятых данных, с использованием механической модели, содержащей по меньшей мере одно из значения инерции, значения затухания и значения жесткости;
генерирование данных управления для преобразователя для демпфирования крутильного колебания на основании упомянутой по меньшей мере одной динамической компоненты вращающего момента и
посылку данных управления в преобразователь для модулирования активной мощности, обмен которой осуществляется между преобразователем и электрической машиной.
10. Система контроллера для демпфирования крутильного колебания, связанная с преобразователем, питающим электрическую машину, механически соединенную с цепью привода, при этом система контроллера включает:
входной интерфейс для приема измеренных данных, связанных с механическими переменными турбомашины цепи привода; и
контроллер, связанный с входным интерфейсом и выполненный с возможностью:
вычисления по меньшей мере одной динамической компоненты вращающего момента вдоль секции вала цепи привода на основании механических переменных турбомашины с использованием механической модели, содержащей по меньшей мере одно из значения инерции, значения затухания и значения жесткости;
генерирования данных управления для преобразователя для демпфирования крутильного колебания в механической цепи привода на основании упомянутой по меньшей мере одной динамической компоненты вращающего момента и
посылки данных управления в преобразователь для модулирования активной мощности, обмен которой осуществляется между преобразователем и электрической машиной.
| US 7173399 B2, 06.02.2007 | |||
| DE 4427697 A1, 16.02.1995 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ И РЕЗИСТЕНТНОСТИ НОВОТЕЛЬНЫХ КОРОВ | 2002 |
|
RU2230526C2 |
| СНИЖЕНИЕ ВИБРАЦИИ В УСТРОЙСТВЕ, СОДЕРЖАЩЕМ РОТОР И НЕПОДВИЖНЫЕ ИСТОЧНИКИ ВОЗМУЩЕНИЙ | 2002 |
|
RU2304220C2 |
| DE 102004021412 A1, 24.11.2005 | |||
| US 20090025488 A1, 29.01.2009 | |||
| EP 2073374 A1, 24.06.2009 | |||
| WO 2006007891 A1, 26.01.2006 | |||

