Изобретение относится к системе в соответствии с ограничительной частью п. 1 формулы.
Такая система известна, например, из US 2010/0135825 A1 и используется для сжижения газа, в частности природного газа.
Известная система содержит два электродвигателя, механически соединенных между собой общим валом. На валу в качестве нагрузки расположен компрессор или расположена компрессорная система. Вращающиеся компоненты, т.е. вал, роторы компрессоров, муфты между валами двигателей и валом компрессора, а также роторы двигателей называются звеном системы.
Общеизвестно, что такие системы имеют собственные колебания. Для анализа и документирования таких собственных колебаний используются так называемые диаграммы Кэмпбелла.
Недостатком такой системы является то, что электродвигатели могут возбуждать собственные колебания ее звена. Эти собственные колебания должны, следовательно, демпфироваться или их возбуждение должно предотвращаться, поскольку иначе собственные колебания могут повредить или даже разрушить систему.
Задачей изобретения является создание системы, которая позволила бы решить проблему возбуждения определенных собственных частот нагрузки.
Согласно изобретению эта задача решается посредством объекта, охарактеризованного признаками п. 1 формулы изобретения. Предпочтительные варианты приведены в зависимых пунктах.
Предложенная система содержит первый и второй электродвигатели, механически связанные между собой ее общим звеном, причем звено имеет крутильное собственное колебание с собственной частотой, за счет первого электродвигателя на звено воздействует первый пульсирующий момент, а за счет второго электродвигателя - второй пульсирующий момент, а второй электродвигатель расположен по отношению к первому электродвигателю таким образом, что воздействие второго пульсирующего момента на звено приводит к демпфированию возбуждения собственного колебания за счет первого пульсирующего момента.
Благодаря предложенному расположению второго электродвигателя относительно первого можно целенаправленно демпфировать по меньшей мере одно собственное колебание звена. Если демпфирование оптимальное, то собственное колебание можно даже погасить. Следовательно, система не требует никаких дополнительных компонентов или регулировок, которые препятствуют или контролируют возбуждение этого собственного колебания. Работа системы становится более надежной, поскольку собственное колебание, будучи конструктивно обусловленным, не может возникнуть или может возникнуть лишь в демпфированном виде.
В одном предпочтительном варианте системы первый электродвигатель приводится ее первым приводом, а второй электродвигатель - ее вторым приводом, причем оба привода выполнены в виде вентильных преобразователей частоты с промежуточным контуром тока.
Выполнение приводов в виде вентильных преобразователей частоты с промежуточным контуром тока обеспечивает, в частности, недорогую эксплуатацию системы.
В одном предпочтительном варианте системы, комбинируемом с ее другими предпочтительными вариантами, один из обоих электродвигателей выполнен в виде синхронной машины. В другом предпочтительном варианте оба электродвигателя выполнены в виде синхронных машин.
Выполнение по меньшей мере одного электродвигателя в виде синхронной машины обеспечивает недорогую эксплуатацию системы в диапазоне высокой мощности, в частности свыше 60 МВт.
В одном предпочтительном варианте системы, комбинируемом с ее другими предпочтительными вариантами, в которых первый электродвигатель системы приводится первым приводом системы, а второй электродвигатель - ее вторым приводом, оба привода посредством фазных проводов соединены с питающей сетью. Первый привод содержит первый вентильный преобразователь частоты, а второй привод - второй вентильный преобразователь частоты, причем оба вентильных преобразователя частоты выполнены со стороны питающей сети и первого и второго двигателей соответственно в виде неавтономного вентильного преобразователя электроэнергии.
В одном предпочтительном варианте системы, комбинируемом с ее другими предпочтительными вариантами, второй вентильный преобразователь частоты эксплуатируется с фазовым сдвигом на угол ΔphΝ относительно первого вентильного преобразователя частоты.
Это позволяет оптимизировать обратное воздействие системы на сеть, в частности можно предотвратить ввод нежелательных частот в питающую сеть.
Например, второй привод может содержать второй трансформатор, посредством которого реализуется фазовый сдвиг на угол ΔphN.
В одном предпочтительном варианте системы, комбинируемом с ее другими предпочтительными вариантами, оба вентильных преобразователя частоты выполнены соответственно со стороны питающей сети и первого и второго электродвигателей в виде 12-импульсного вентильного преобразователя электроэнергии. Согласно другому предпочтительному варианту каждый со стороны сети вентильный преобразователь электроэнергии первого и второго вентильных преобразователей частоты выполнен в виде тиристорного вентильного преобразователя электроэнергии с фазным управлением и посторонней коммутацией. Согласно другому предпочтительному варианту, каждый со стороны нагрузки вентильный преобразователь электроэнергии первого и второго преобразователей выполнен в виде тиристорного вентильного преобразователя электроэнергии с фазным управлением и посторонней коммутацией.
В одном предпочтительном варианте системы, комбинируемом с ее другими предпочтительными вариантами, второй электродвигатель расположен с радиальным поворотом относительно первого электродвигателя на относительный моторный угол ΔphM, который, по меньшей мере, приблизительно равен:
где fN - частота питающей сети, fM - частота вентильных преобразователей электроэнергии со стороны нагрузки, NN - число импульсов вентильных преобразователей электроэнергии со стороны сети, a NM - число импульсов вентильных преобразователей электроэнергии со стороны нагрузки.
В частности, если ΔphN отличается от нуля, то благодаря этой формуле даже при работе обоих вентильных преобразователей электроэнергии со стороны сети с фазовым сдвигом ΔphN можно достичь демпфирования или даже гашения собственного колебания звена. Следовательно, систему можно рассчитать без специальных защитных концепций или систем против определенного собственного колебания звена, благодаря чему систему можно, в целом, дешевле изготавливать и надежнее эксплуатировать.
В одном предпочтительном варианте системы второй статор смещен относительно первого статора радиально на статорный угол ϕSt, а второй ротор расположен с поворотом относительно первого ротора радиально на роторный угол ϕR, причем для относительного моторного угла справедливо: ΔphM=ϕR-ϕSt.
В одном предпочтительном варианте системы, комбинируемом с ее другими предпочтительными вариантами, звено содержит нагрузку, которой является предпочтительно компрессорная система. Такая система имеет предпочтительно мощность обоих электродвигателей по меньшей мере 60 МВт.
В одном предпочтительном варианте системы, комбинируемом с ее другими предпочтительными вариантами, первый электродвигатель содержит первые ротор и статор, а второй электродвигатель - вторые ротор и статор, причем второй ротор не ориентирован радиально по первому ротору и/или второй статор не ориентирован радиально по первому статору.
Другие предпочтительные варианты осуществления изобретения приведены в других зависимых пунктах формулы и следуют из описания.
Предпочтительные варианты осуществления изобретения описаны со ссылкой на прилагаемые чертежи. Эти предпочтительные варианты осуществления изобретения не являются ограничивающими его примерами.
На чертежах схематично представлено следующее:
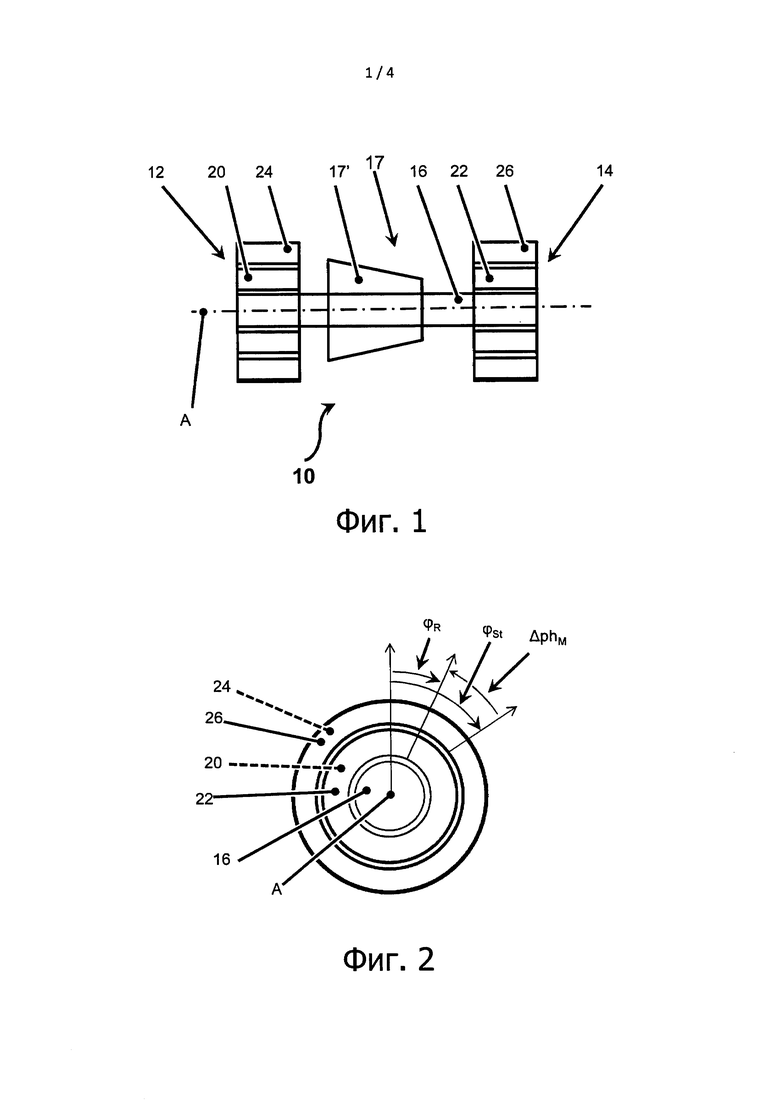
- фиг. 1: вид сбоку механической системы с первым и вторым моторами, которые механически связаны между собой общим валом, причем через вал приводится нагрузка;
- фиг. 2: механическая система на фиг. 1 в направлении продольной оси, причем обозначены различные углы отдельных компонентов по отношению друг к другу, а нагрузка для наглядности не показана;
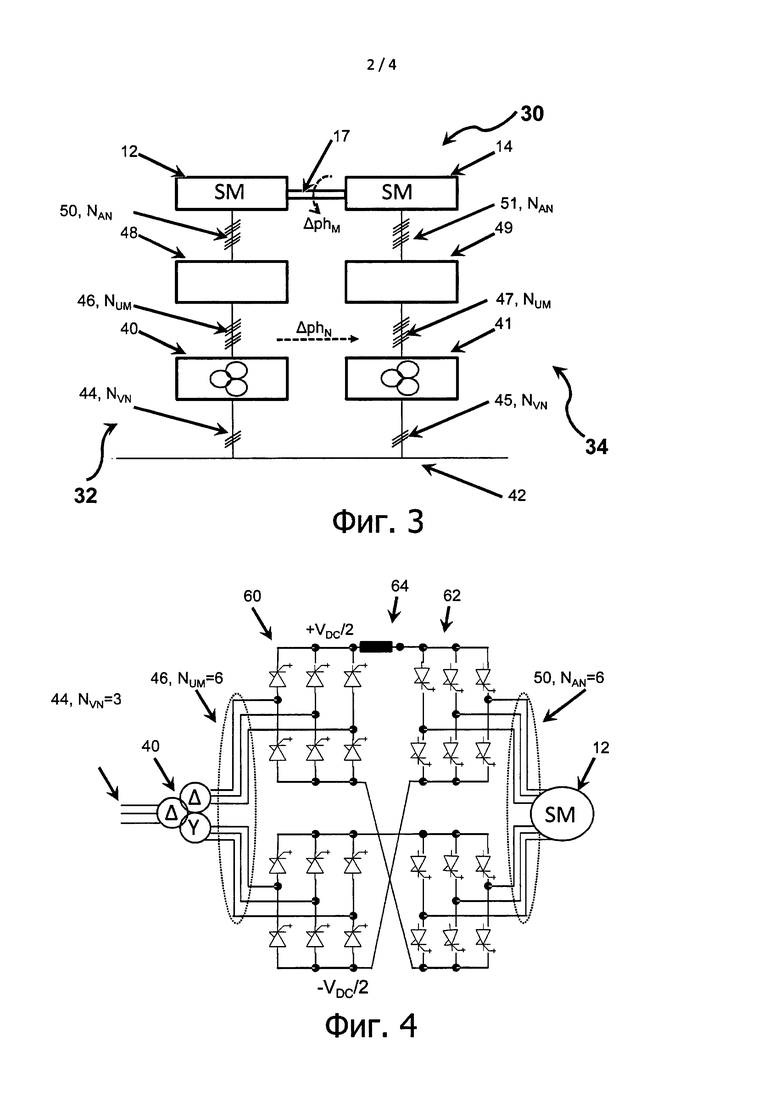
- фиг. 3: пример компоновки электрической системы для привода первого и второго моторов;
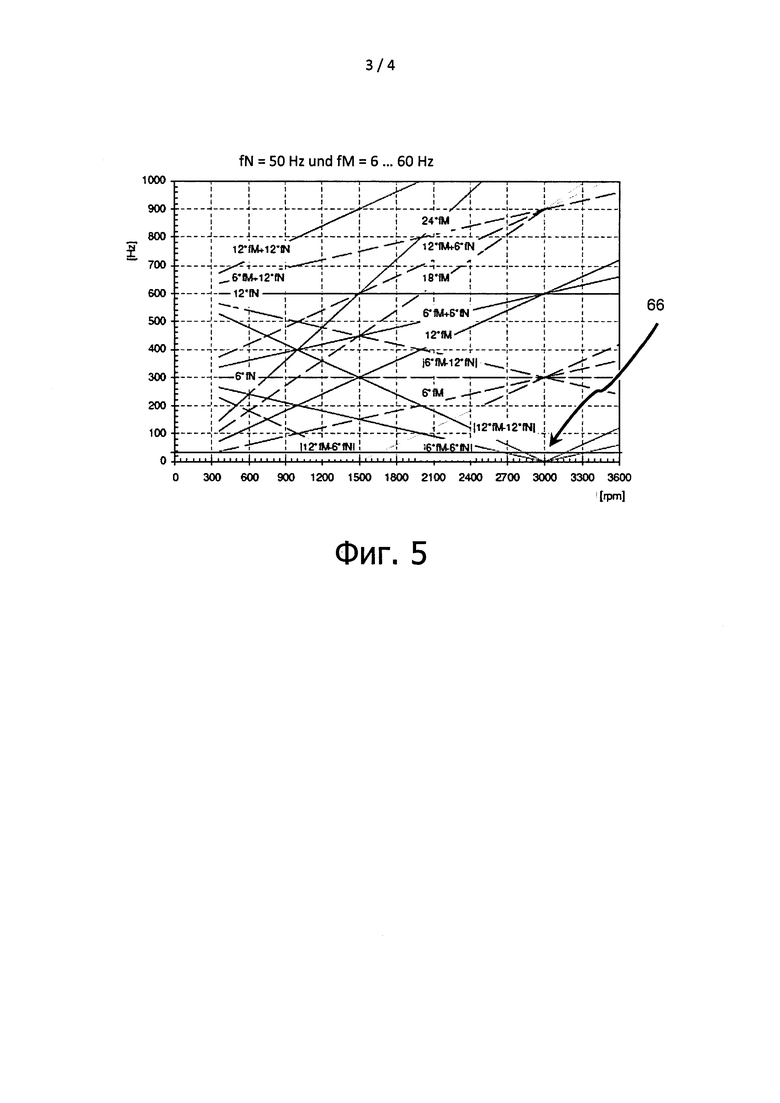
- фиг. 4: пример варианта вентильного преобразователя частоты электрической системы;
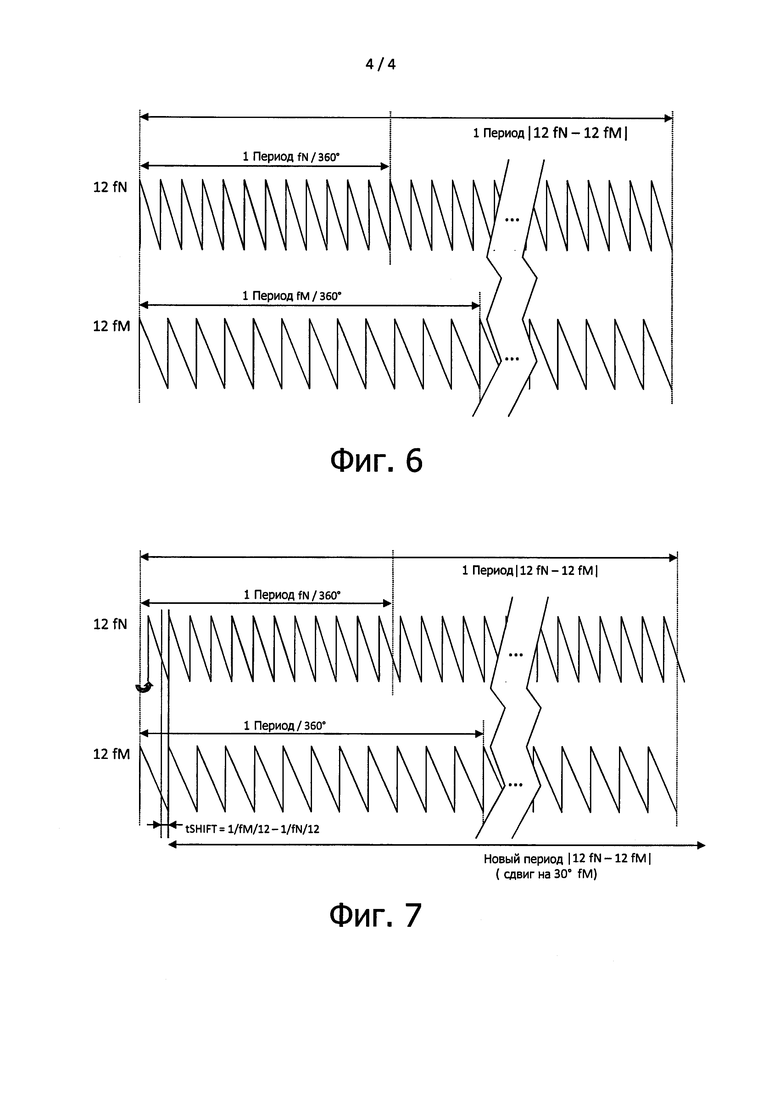
- фиг. 5: типичная диаграмма Кэмпбелла, на которой нанесены частоты пульсирующих моментов звена механической системы, образованного роторами моторов, валом и нагрузкой, в зависимости от скорости вращения звена, а также крутильные собственные частоты звена;
- фиг. 6: длина периода произведения типа свертки 12-кратной частоты fN сети на 12-кратную частоту fM моторов, причем частота сети здесь обозначена fN, частота моторов - fM, а произведение типа свертки - |12fN-12fM|;
- фиг. 7: по сравнению с фиг. 6 12-кратная частота сети с фазовым сдвигом на 30° относительно 12-кратной частоты сети из фиг. 6.
На фиг. 1 и 2 изображена предложенная механическая система 10 с первым 12 и вторым 14 электродвигателями и общим валом 16, посредством которого оба электродвигателя 12, 14 механически связаны между собой. Для простоты электродвигатели называются коротко моторами. На валу 16 размещена нагрузка 17'. Такие механические системы 10 используются, например, для газосжижающей установки, причем в этом случае нагрузкой 17' является компрессор или компрессорная система, состоящая из нескольких компрессоров для сжижения газа, в частности природного газа. Вращающиеся компоненты механической системы 10 называются звеном 17. Это, в частности, первый ротор 20 первого мотора 12, второй ротор 26 второго мотора 14, вал 16 и нагрузка 17', а также возможные другие компоненты, например муфты между соответствующим ротором 20, 26 и валом 16. Для привода нагрузки 17' в случае установки сжижения природного газа в настоящее время требуются приводные мощности, обычно 60-120 МВт. Однако уже разрабатываются установки большей приводной мощности. Например, эта мощность может быть распределена пополам между обоими моторами 12, 14, так что каждый из них может отдавать на вал 16 мощность 30-60 МВт. В качестве альтернативы один из обоих моторов 12, 14 может быть рассчитан на отдачу большей мощности, чем другой, например, мотор 12 можно было бы рассчитать на отдачу мощности 70-100 МВт, а мотор 14 - на отдачу мощности до 20 МВт.
Моторы 12, 14 предназначены для привода вала 16 и нагрузки 17'. Вал 16 вместе с нагрузкой 17' образует, как уже сказано, звено 17. Для этого ротор 20 мотора 12 механически связан с валом 16. Точно так же с валом 16 связан ротор 22. Предпочтительно роторы 20, 22 соединены с валом 16 непосредственно или выполнены на нем. В качестве альтернативы один или оба ротора 20, 22 могут быть связаны с валом 16 посредством передачи (не показана).
Вокруг первого ротора 20 расположен первый статор 24 первого мотора 12, а вокруг второго ротора 22 - второй статор 26 второго мотора 14. Как показано на фиг. 1, предпочтительно, что моторы 12, 14 расположены на противоположных концах вала 16. Однако возможны и другие расположения.
В первом примере осуществления изобретения моторы 12, 14 выполнены в виде синхронных машин (SM на фиг. 3, 4). Однако изобретение может быть реализовано, в принципе, также с асинхронной машиной.
Звено 17 выполнено максимально жестким, однако различные определенные собственные частоты могут возбуждать его собственные колебания, в частности крутильные колебания. В случае крутильного колебания оно происходит на вращательную степень свободы звена 17, в данном случае вокруг его продольной оси А. В случае первой собственной моды собственного колебания с первой собственной частотой лишь первый конец звена 17 или вала 16 поворачивается относительно другого конца звена 17 или вала 16. В случае второй собственной моды собственного колебания со второй собственной частотой оба конца звена 17 колеблются синхронно по отношению друг к другу, однако средний участок звена 17 колеблется в противоположном периферийном направлении по отношению к колебанию обоих концов. Собственные колебания звена 17 могут возникать, в частности, также при его вращении, т.е. собственное колебание наложено на постоянное вращательное движение звена 17.
Для последующего рассмотрения обоих статоров 24, 26 моторов 12, 14 статор 24 принимается ниже без ограничения общности как неподвижная система координат. Статор 26 может быть расположен на образованной валом 16 продольной оси А системы 10 в периферийном направлении, в принципе, произвольно. Как показано на фиг. 2, угол, на который статор 26 расположен с поворотом относительно статора 24, называется статорным углом ϕSt. Он может быть, следовательно, нулем или может отличаться от нуля. В случае статорного угла ϕSt=0 полюса статора 26 в направлении продольной оси А совпадают с полюсами статора 24.
Система координат для вращающихся компонентов системы 10, в частности для ее звена 17 и роторов 20, 22, определяется без ограничения общности ротором 20. Ротор 22 может быть расположен на механически ненагруженном валу 16, т.е., например, пока система 10 неподвижна, а моторы 12, 14 и нагрузка 17' не оказывают на вал 16 крутящего момента, с поворотом на угол, который ниже называется роторным углом ϕR. Он может быть, следовательно, нулем или может отличаться от нуля. В случае роторного угла ϕR=0 полюса ротора 22 в направлении продольной оси А совпадают с полюсами ротора 20. На фиг. 2 обозначен также относительный моторный угол ΔphM между статорным ϕSt и роторным ϕR углами.
Под действием механической нагрузки звено 17 может поворачиваться, в частности в качестве функции времени, поскольку вал 16 и нагрузка 17' неполностью жесткие. Механические нагрузки на вал 16 вызваны, в частности, обоими моторами 12, 14 и нагрузкой 17'. В частности, оба мотора 12, 14 могут возбуждать крутильные собственные колебания звена 17.
На фиг. 3 показана приводная система 30 для привода моторов 12, 14 системы 10. Мотор 12 приводится приводом 32, а мотор 14 - приводом 34. Оба привода 32, 34 являются типичными приводами, как они наилучшим образом известны специалисту для подобных целей.
Привод 32 содержит трансформатор 40, который со стороны питающей сети 42 соединен с ней посредством NVN-го числа фазных проводов 44. Питающая сеть 42 выполнена 3-фазной, так что трансформатор 40 соединен с ней тремя (NVN=3) фазными проводами 44. Со стороны мотора 12 трансформатор 40 шестью (NUM=6) фазными проводами 46 соединен с вентильным преобразователем 48 частоты. Обычно соединение между трансформатором 40 и преобразователем 48 частоты равно или составляет целочисленное кратное NVN. В данном примере NUM=6, причем шесть фаз сдвинуты по отношению друг к другу.
Преобразователь 48 частоты соединен с мотором 12 посредством ΝAN-го числа фазных проводов 50. Обычно используются 3, 6, 12, 18 или 24 фазных провода 50. В данном примере используются шесть (NAN=6) фазных проводов 50.
Привод 34 выполнен, в основном, аналогично приводу 32.
Привод 34 содержит трансформатор 41, который со стороны питающей сети 42 соединен с ней также посредством NVN-го числа фазных проводов 45. Со стороны мотора 14 трансформатор 41 шестью (NUM=6) фазными проводами 47 соединен с вентильным преобразователем 49 частоты. Обычно соединение между трансформатором 41 и преобразователем 49 частоты равно или составляет целочисленное кратное NVN. В данном примере NUM=6, причем шесть фаз сдвинуты по отношению друг к другу.
Преобразователь 49 частоты соединен с мотором 14 посредством ΝAN-го числа фазных проводов 51. Обычно используются 3, 6, 12, 18 или 24 фазных провода 51. В данном примере используются шесть (NAN=6) фазных проводов 51.
Шесть фаз на выходе трансформатора 41 могут быть сдвинуты по фазе на угол ΔphN относительно шести фаз на выходе трансформатора 40. Это можно использовать, например, для того, чтобы уменьшить мешающее обратное воздействие приводной системы 30 на питающую сеть 42. В приводной системе на фиг. 3 и 4 предпочтительным может быть, например, угол фазового сдвига ΔphΝ 15°. Однако он может также отличаться от 15° или может быть равен нулю.
Следовательно, угол фазового сдвига ΔphΝ является электрическим углом фазового сдвига со стороны сети между преобразователями 48, 49 частоты.
На фиг. 4 изображен подробный вид по фиг. 3. Здесь показаны три фазных провода 44 (NVN=3), посредством которых трансформатор 40 соединен с питающей сетью 42 (фиг. 3). Как видно, трансформатор 40 выполнен таким образом, что со стороны преобразователя 48 частоты шесть фазных проводов 46 (NUM=6) соединены с трансформатором 40. Шесть фаз сдвинуты по отношению друг к другу, причем в случае шести фазных проводов фазовый сдвиг составляет предпочтительно 60°. Вообще, фазовый сдвиг между отдельными фазными проводами должен составлять 360°, разделенных на число NUM фазных проводов 46, что выражается формулой 360°/NUM. Фазовый сдвиг в 60° может быть достигнут, например, посредством 3-фазной питающей сети 42 и трансформаторных обмоток, соединенных в треугольник или в звезду. Это и другое возможные выполнения известны специалисту.
На фиг. 4 изображен также вентильный преобразователь 60 электроэнергии преобразователя 48 частоты. Преобразователь 60 электроэнергии образован двумя последовательно включенными 6-импульсными мостовыми выпрямительными схемами. Вместе они образуют, тем самым, 12-импульсную выпрямительную схему. Специалисту известны и другие схемы, которые также являются 12-импульсными выпрямительными схемами. В данном примере в качестве коммутационных элементов показаны тиристоры с фазным управлением. Преобразователь 60 электроэнергии выполнен, следовательно, неавтономным. Следовательно, его частота равна частоте питающей сети и обозначена fN. Следовательно, fN составляет 50 или 60 Гц, однако, в принципе, может быть произвольной. Вместо коммутационных элементов на фиг. 3 могут использоваться также другие коммутационные элементы в виде тиристоров. Специалисту известны подходящие схемы преобразователей электроэнергии.
В общем, NN-импульсная выпрямительная схема достигается за счет выпрямления NN/2-го числа фаз, причем выпрямляются обе полуволны колебаний. В случае если выпрямляются только положительные или только отрицательные полуволны, число импульсов равно числу сдвинутых по отношению друг к другу фаз. В примере на фиг. 4 NN=12.
Со стороны мотора или со стороны нагрузки преобразователь 48 частоты содержит вентильный преобразователь электроэнергии 62 со стороны нагрузки. В данном примере последний соединен с мотором 12 шестью фазными проводами 50 (NAM=6). Фазные провода 50 могут включаться независимо друг от друга. Для этого преобразователь 62 электроэнергии содержит тиристоры с фазным управлением и выполнен также неавтономным. Специалисту наилучшим образом известны другие возможности. Поскольку каждая из фаз может нагружаться либо на +VDC/2, либо на -VDC/2, инверторная схема называется 12-импульсным инвертором. В целом, число NM импульсов NM-импульсного инвертора определено следующим образом: число фазных проводов NAN*2, причем NAN-м числом фазных проводов 50 можно управлять, по меньшей мере, с фазовым сдвигом по отношению друг к другу. В общем случае NAN-м числом фазных проводов 50 можно управлять независимо друг от друга. В примере на фиг. 3 и 4 NM=12.
Аналогично приводу 32 привод 34 содержит преобразователи электроэнергии со стороны сети и нагрузки, которые выполнены аналогично таким же преобразователям электроэнергии привода 34.
В данном примере моторы 12, 14 выполнены с шестью статорными обмотками каждый, которые включены, например, в звезду. Каждая статорная обмотка соединена с одним из фазных проводов 50 соответствующего привода 32, 34.
Оба преобразователя 62 электроэнергии со стороны нагрузки служат для привода моторов 12, 14 с изменяющейся частотой, так что каждый мотор 12, 14 вращается с изменяющейся скоростью вращения. В случае 12-импульсного инвертора и статора с шестью статорными обмотками мотор вращается с частотой fMot=fM/Npp, где Npp - число пар полюсов статора, a fM - частота преобразователя электроэнергии со стороны нагрузки. При Npp=1 мотор вращается с частотой fM преобразователя 62 электроэнергии со стороны нагрузки. Поскольку, однако, на каждом фазном проводе 50, 51 помимо частоты fM инвертора имеются и другие частоты, эти частоты приводят к наложениям. Эти дополнительные частоты приводят к магнитным полям в воздушном зазоре мотора 12 или 14, которые не вращаются со скоростью вращения и тем самым приводят к пульсирующим моментам, воздействующим на ротор.
На фиг. 5 изображена типичная диаграмма Кэмпбелла для описанных выше приводов 32, 34, которые со стороны сети и нагрузки содержат 12-импульсные преобразователи 60, 62 электроэнергии. Частота питающей сети, как и преобразователя 60 электроэнергии со стороны сети, обозначена на фиг. 5 fN, а не fN. Как сказано выше, частота преобразователя частоты со стороны нагрузки связана с изменяющейся скоростью вращения соответствующего мотора 12, 14 и обозначена на фиг. 5-7 fM, а не fM. На фиг. 5 скорость вращения указана в оборотах в минуту, причем указано сокращение rpm. Сплошные линии указывают частотную характеристику целочисленных гармонических пульсирующих моментов описанной выше 12-импульсной системы. Прерывистые линии указывают частотную характеристику нецелочисленных гармонических пульсирующих моментов. На этой диаграмме Кэмпбелла для числа пар полюсов моторов 12, 14 была взята 1. Следовательно, частота fM инвертора равна частоте моторов.
На диаграмме Кэмпбелла частотная характеристика пульсирующих моментов изображена в зависимости от числа оборотов rpm. Они могут измеряться, например, в накопительном промежуточном контуре между соответствующим преобразователем 60 электроэнергии со стороны сети и преобразователем 62 электроэнергии со стороны нагрузки и приводят к моментам на соответствующий мотор 12, 14, которые не соответствуют скорости вращения мотора.
Далее в качестве примера обозначена частота 66 крутильного собственного колебания звена 17. Частоты первого, второго и третьего собственных колебаний могут составлять, например, 6, 19 и 56 Гц, однако это зависит от выполнения звена 17. Частоты крутильных собственных колебаний не зависят от скорости вращения звена 17 в данный момент.
Как следует из диаграммы Кэмпбелла, частота 66 или частотная характеристика собственного колебания звена 17 пересекается с частотными характеристиками пульсирующих моментов. Поскольку частота fM преобразователя 62 частоты изменяется при изменении числа оборотов звена 17, при его разгоне из состояния остановки до нужной скорости вращения оно проходит через определенную полосу частот, в которой обычно лежат пересечения собственной частоты 66 звена 17 с вызванными приводом пульсирующих моментов. Поскольку разгон происходит относительно быстро, звено 17 при своих собственных частотах обычно возбуждается несильно. Однако обычно пересечения собственной частотной характеристики 66 собственного колебания звена 17 с частотными характеристиками пульсирующих моментов близко к скорости вращения для длительной эксплуатации приводят к нежелательным колебаниям звена 17. На диаграмме на фиг. 5 это близко к скорости вращения 3000 rpm.
Как показано, например, на фиг. 1, система содержит моторы 12, 14. Они механически связаны между собой общим звеном 17. Оба мотора 12, 14 предназначены для привода звена 17, имеющего крутильную собственную частоту, причем на звено 17 за счет мотора 12 воздействует зависимый от скорости вращения первый пульсирующий момент, а за счет мотора 14 - также зависимый от скорости вращения второй пульсирующий момент. Согласно изобретению мотор 14 расположен относительно мотора 12 таким образом, что при данной скорости вращения звена 17 воздействие первого и второго пульсирующих моментов приводит к гашению собственной частоты на звене 17.
Гашение возбуждения звена 17 при определенной частоте может происходить следующим образом, причем ниже привод 34 эксплуатируется без электрического фазового сдвига ΔphΝ относительно привода 32, т.е. напряжения и/или токи в фазных проводах 46, 47 между трансформатором 40 и расположенным со стороны сети преобразователем 60 электроэнергии преобразователя 48 частоты, а также между трансформатором 41 и расположенным со стороны сети преобразователем 60 электроэнергии преобразователя 49 частоты находятся в фазе по отношению друг к другу. Угол ΔphΝ фазового сдвига равен, следовательно, нулю. Кроме того, делается различение случаев четных и нечетных колебаний с собственной частотой.
При четном колебании системы оба ее конца колеблются синхронно по отношению друг к другу. Колебание можно, следовательно, погасить путем синхронного возбуждения обоих концов системы. Этого можно достичь следующим образом:
- ротор 22 поворачивается на 180° относительно ротора 20, причем статоры 24, 26 ориентированы радиально друг другу, причем, следовательно, ϕR=180°, ϕSt=0°, а ΔphM=ϕR=180°, или
- статор 26 поворачивается на 180° относительно статора 24, причем роторы 20, 22 ориентированы радиально друг по другу, причем, следовательно, ϕR=0°, ϕSt=180°, а ΔphM=ϕSt=-180°, причем -180° эквивалентно +180°, или
- статор 26 расположен повернутым на угол ϕSt относительно статора 24, а ротор 22 расположен под углом ϕR относительно ротора 20, причем для углов действительно следующее уравнение: ΔphM=ϕR-ϕSt=180°.
При этом следует учесть, что положение «180°» эквивалентно «-180°», поскольку это то же самое положение. Точно так же целочисленные кратные 360° суммированы с эквивалентными положениями 180°.
Если число Npp пар полюсов отличается от 1, то добавляются дополнительные эквивалентные угловые положения. Для Npp=2 - это 90 и 270°, для Npp=3 - дополнительно 45, 135, 225 и 315°. Для большего числа пар полюсов - соответственно дополнительные угловые положения.
В случае нечетных гармонических колебаний системы оба конца системы колеблются противоположно друг другу. Колебание можно, следовательно, погасить путем синхронного возбуждения обоих концов системы. Этого можно достичь следующим образом:
- статор 26 ориентирован радиально по статору 24, а роторы 20, 22 ориентированы также радиально друг по другу, причем, следовательно, ϕR=0°, ϕSt=0°, ΔphM=0°, или
- статор 26 расположен повернутым на угол ϕSt относительно статора 24, а ротор 22 расположен на угол ϕR относительно ротора 20, причем для углов действительно следующее уравнение: ΔphM=ϕR-ϕSt=0°.
При этом следует учесть, что положение «0°» эквивалентно целочисленному кратному 360°.
Если число Npp пар полюсов отличается от 1, то добавляются дополнительные эквивалентные угловые положения. Для Npp=2 это 180°, для Npp=3 - дополнительно 90 и 270°. Для большего числа пар полюсов - соответственно дополнительные угловые положения.
Однако может быть также желательным эксплуатировать оба привода 32, 34 со стороны питающей сети 42 с фазовым сдвигом по отношению друг к другу, чтобы уменьшить ее помеху, вызванную приводами 32, 34. В случае 12-импульсной системы обычно преобразователь 60 электроэнергии со стороны сети преобразователя 49 частоты эксплуатируется с фазовым сдвигом ΔphN=15° по отношению к преобразователю 60 электроэнергии преобразователя 48 частоты. Этот фазовый сдвиг может быть достигнут за счет трансформатора 41. Если фазовый сдвиг ΔphN отличается от 0°, то его следует учитывать для гашения возбуждающих пульсирующих моментов.
На фиг. 6 вверху схематично изображена сторона постоянного напряжения 12-импульсного со стороны сети преобразователя 60 электроэнергии преобразователя 48 частоты, которая колеблется с 12-кратной частотой fN сети. Для простоты была выбрана пилообразная функция. На фиг. 6 внизу изображена сторона постоянного напряжения 12-пульсного со стороны нагрузки преобразователя 62 электроэнергии преобразователя 48 частоты, которая колеблется с 12-кратной частотой преобразователя 62 электроэнергии. Напряжение также чисто схематично изображено в виде пилообразной функции. Между импульсными постоянными напряжениями преобразователей 60, 62 электроэнергии возникает низкочастотное биение, которое заметно в виде низкочастотной передачи энергии в преобразователе 48 частоты. Далее это биение напряжения приводит в накопительном промежуточном контуре 64 преобразователя 48 частоты к низкочастотному, в целом, нецелочисленному крутящему моменту в воздушном зазоре мотора 12, колеблющемуся с частотой низкочастотного биения. Аналогичный случай относится, в принципе, к преобразователю 49 частоты и мотору 14. Это показано на диаграмме Кэмпбелла на фиг. 5.
По сравнению с фиг. 6 на фиг. 7 показана ситуация для преобразователя 49 частоты. Также показаны импульсные постоянные напряжения преобразователей 60, 62 электроэнергии, однако напряжение со стороны питающей сети 42 сдвинуто по фазе относительно частоты fN сети. Фазовый сдвиг составляет ΔphΝ. Как сказано выше, этот фазовый сдвиг может быть достигнут за счет трансформатора. Аналогично предшествующему описанию преобразователя 48 частоты в накопительном промежуточном контуре 64 преобразователя 49 частоты также возникает низкочастотный, в целом, нецелочисленный крутящий момент в воздушном зазоре мотора 14.
Как можно видеть на фиг. 6, 7, фазовый сдвиг ΔphΝ частоты преобразователя 60 электроэнергии преобразователя 49 частоты приводит к фазовому сдвигу низкочастотного биения в потоке энергии через преобразователь 49 частоты по отношению к низкочастотному биению в преобразователе 48 частоты и тем самым низкочастотного пульсирующего момента в воздушном зазоре мотора 14 по сравнению с низкочастотным пульсирующим моментом в воздушном зазоре мотора 12. Сравнив фиг. 6 и 7, можно вывести сдвиг из частоты fN преобразователя 60 электроэнергии со стороны сети, фазового сдвига ΔphΝ и частоты fM преобразователя 62 электроэнергии со стороны нагрузки, что отвечает, в целом, следующему закону:
где NN - число импульсов преобразователя электроэнергии со стороны сети, a NM - число импульсов преобразователя электроэнергии со стороны нагрузки. Если число импульсов обоих преобразователей электроэнергии равно, то:
Обе формулы для ΔphM относятся, вообще, к синхронным машинам.
По меньшей мере, для одного критического числа оборотов, при котором частота биения совпала бы с собственной частотой собственного колебания звена 17, с помощью предложенной системы может осуществляться гашение крутильного собственного колебания нагрузки.
Для корректного предварительного поворота ротора 22 относительно ротора 20 относительный моторный угол ΔphM=ϕR-ϕSt по вышеприведенной формуле должен быть доведен до 180° для целочисленных и до 0° для нецелочисленных гармонических колебаний нагрузки 17'. Целочисленные кратные 360°, суммированные с 0 или 180°, эквивалентны 0 или 180°. К машинам с большим числом Npp пар полюсов относится аналогично значение 180°/Npp или 360°/Npp.
В данном примере нагрузкой 17' является расположенная на валу 16 компрессорная система. Эта нагрузка 17' имеет первое крутильное собственное колебание при собственной частоте 6,48 Гц. Нагрузка 17' приводится двумя неавтономными преобразователями 48, 49 частоты. Они подключены к питающей сети с частотой 60 Гц через трансформаторы 40, 41. Номинальная частота моторов 12, 14 составляет также 60 Гц.
При скорости вращения 3567,6 об/мин, что соответствует 99,1% номинальной скорости или номинальной частоте моторов, произведение типа свертки 12-кратной частоты fN сети на 12-кратную частоту fM моторов возбуждает первое гармоническое колебание. Названное произведение типа свертки обозначено на фиг. 5 |12 fN-12 fM| (на фиг. 5 fN обозначена как fN, a fM - как fM).
Согласно изобретению возбуждение нагрузки 17' пульсирующими моментами предотвращается или демпфируется за счет того, что возбуждения взаимно гасятся или, по меньшей мере, демпфируются за счет моторов 12, 14. Для крутильного первого гармонического колебания это достигается тем, что оба вызванных сверткой пульсирующих момента воздействуют на нагрузку синхронно или в фазе.
Если из-за обратного действия приводной системы 30 на сеть привод 34 со стороны питающей сети 42 эксплуатируется с фазовым сдвигом ΔphN 15° по отношению к приводу 32, из вышеприведенной формулы следует, что относительный моторный угол ΔphM между ротором 22 и статором 26 должен быть 1651,67 или 211,67°. Если статор 26 ориентирован радиально относительно статора 24 и, тем самым, ϕSt=0°, то ротор 22 должен быть радиально повернут относительно ротора 24 на 211,67°. Благодаря такой компоновке системы можно оптимально гасить воздействующие на нагрузку пульсирующие моменты. Если угол ΔphM реализовать точно нельзя, то, те не менее, возможно хорошее гашение пульсирующих моментов.
В общем, на основе вышеприведенной формулы расчета ΔphM можно рассчитать оптимальный фазовый сдвиг относительного моторного угла. Отклонения от него возможны и приводят также по меньшей мере частично к гашению или уменьшению возбуждения собственного колебания за счет пульсирующих моментов. В частности, отклонения от относительного моторного угла ΔphM допустимы до ±10°.
В других вариантах преобразователь 60 электроэнергии со стороны сети и/или преобразователь 62 электроэнергии со стороны нагрузки преобразователя 48 частоты и/или преобразователя 49 частоты может быть выполнен в виде преобразователя частоты с автономной коммутацией.
Вместо только включаемых тиристоров могут использоваться выключаемые тиристоры, например запираемый тиристор (GTO) или тиристор с интегрированным управлением (IGCT) или тиристор с симметричным управляющим электродом (SGCT).
В принципе, может использоваться также асинхронная машина с подходящим преобразователем частоты с промежуточным контуром тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения крутящего момента на валу синхронного электродвигателя | 1989 |
|
SU1719935A1 |
| Вентильный электродвигатель | 1984 |
|
SU1267545A1 |
| ЧАСТОТНЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2581629C1 |
| Электропривод переменного тока | 1986 |
|
SU1431027A1 |
| Вентильный электродвигатель | 1984 |
|
SU1259428A1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| Способ управления электродвигателем двойного питания | 1982 |
|
SU1073870A1 |
| Асинхронизированная синхроннаяэлЕКТРичЕСКАя МАшиНА | 1978 |
|
SU794702A1 |
| Электропривод переменного тока | 1988 |
|
SU1615856A1 |
| Электропривод для механизма с вентиляторным моментом нагрузки | 1987 |
|
SU1494190A1 |
Изобретение относится к области электротехники и может быть использованао в системах для сжигания газа. Техническим результатом является демпфирование собственных колебаний системы. В системе с первым и вторым электродвигателями (12, 14) механически связанны между собой ее общим звеном (17). Звено (17) имеет крутильное собственное колебание с собственной частотой, причем за счет первого электродвигателя (12) на звено (17) воздействует первый пульсирующий момент, а за счет второго электродвигателя (14) - второй пульсирующий момент. Согласно изобретению второй электродвигатель (14) расположен по отношению к первому электродвигателю (12) таким образом, что воздействие второго пульсирующего момента на звено (17) приводит к демпфированию возбуждения собственного колебания за счет первого пульсирующего момента. 18 з.п. ф-лы, 7 ил.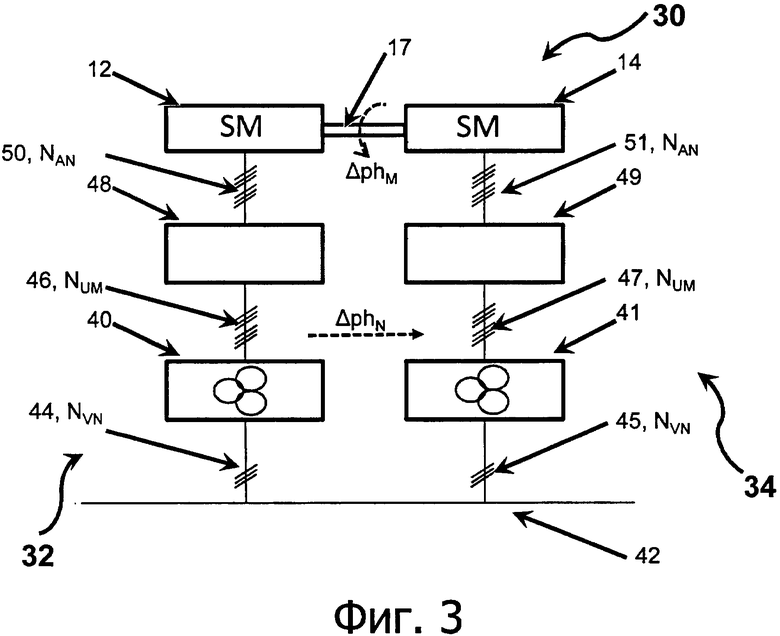
1. Система, содержащая первый и второй электродвигатели (12, 14), механически связанные между собой ее общим звеном (17), причем звено (17) имеет крутильное собственное колебание с собственной частотой, причем посредством первого электродвигателя (12) на звено (17) воздействует первый пульсирующий момент, а посредством второго электродвигателя (14) - второй пульсирующий момент, и причем оба электродвигателя (12, 14) расположены на противоположных концах звена (17), отличающаяся тем, что второй электродвигатель (14) расположен по отношению к первому электродвигателю (12) так, что воздействие второго пульсирующего момента на звено (17) приводит к демпфированию возбуждения собственного колебания за счет первого пульсирующего момента.
2. Система по п. 1, отличающаяся тем, что первый электродвигатель (12) выполнен с возможностью приведения в действие первым приводом (32) системы (10), а второй электродвигатель (14) - ее вторым приводом (34), причем оба привода (32, 34) выполнены в виде вентильных преобразователей частоты с промежуточным контуром тока.
3. Система по п. 2, отличающаяся тем, что один из обоих электродвигателей (12, 14) является синхронной машиной, причем предпочтительно оба электродвигателя (12, 14) являются синхронными машинами.
4. Система по п. 1, отличающаяся тем, что один из обоих электродвигателей (12, 14) является синхронной машиной, причем предпочтительно оба электродвигателя (12, 14) являются синхронными машинами.
5. Система по любому из пп. 1-4, отличающаяся тем, что первый электродвигатель (12) выполнен с возможностью приведения в действие ее первым приводом (32), а второй электродвигатель (14) - ее вторым приводом (34), причем оба привода (32, 34) посредством фазных проводов соединены с питающей сетью (42), при этом первый привод (32) содержит первый вентильный преобразователь (48) частоты, а второй привод (34) - второй вентильный преобразователь (49) частоты, причем оба вентильных преобразователя (48, 49) частоты выполнены со стороны питающей сети (42) и электродвигателей (12, 14) соответственно в виде неавтономного вентильного преобразователя электроэнергии.
6. Система по п. 5, отличающаяся тем, что второй вентильный преобразователь (49) частоты выполнен с возможностью эксплуатации с фазовым сдвигом на угол ΔphΝ относительно первого вентильного преобразователя (48) частоты.
7. Система по п. 6, отличающаяся тем, что второй привод содержит второй трансформатор (41), выполненный с возможностью реализации фазового сдвига на угол ΔphN.
8. Система по п. 5, отличающаяся тем, что оба вентильных преобразователя (48, 49) частоты выполнены соответственно со стороны питающей сети (42) и первого и второго электродвигателей (12, 14) в виде 12-импульсного вентильного преобразователя электроэнергии.
9. Система по п. 6, отличающаяся тем, что оба вентильных преобразователя (48, 49) частоты выполнены соответственно со стороны питающей сети (42) и первого и второго электродвигателей (12, 14) в виде 12-импульсного вентильного преобразователя электроэнергии.
10. Система по п. 8, отличающаяся тем, что каждый со стороны сети вентильный преобразователь (60) электроэнергии первого и второго вентильных преобразователей (48, 49) частоты выполнен в виде тиристорного вентильного преобразователя электроэнергии с фазным управлением и посторонней коммутацией.
11. Система по п. 10, отличающаяся тем, что каждый со стороны нагрузки вентильный преобразователь (61) электроэнергии первого и второго вентильных преобразователей (48, 49) частоты выполнен в виде тиристорного вентильного преобразователя электроэнергии с фазным управлением и посторонней коммутацией.
12. Система по п. 7, отличающаяся тем, что второй электродвигатель (14) повернут относительно первого электродвигателя (12) радиально на относительный моторный угол ΔphM, который, по меньшей мере, приблизительно равен:
где fN - частота питающей сети, fM - частота вентильного преобразователя (62) электроэнергии со стороны нагрузки, NN - число импульсов вентильного преобразователя электроэнергии (60) со стороны сети, a NM - число импульсов вентильного преобразователя (62) электроэнергии со стороны нагрузки.
13. Система по п. 8, отличающаяся тем, что второй электродвигатель (14) повернут относительно первого электродвигателя (12) радиально на относительный моторный угол
ΔphM, который, по меньшей мере, приблизительно равен:
где fN - частота питающей сети, fM - частота вентильного преобразователя (62) электроэнергии со стороны нагрузки, NN - число импульсов вентильного преобразователя электроэнергии (60) со стороны сети, a NM - число импульсов вентильного преобразователя (62) электроэнергии со стороны нагрузки.
14. Система по п. 12, отличающаяся тем, что второй статор (26) смещен относительно первого статора (24) радиально на статорный угол ϕSt, а второй ротор (22) повернут относительно первого ротора (20) радиально на роторный угол ϕR, причем для относительного моторного угла справедливо: ΔphM=ϕR-ϕSt.
15. Система по п. 13, отличающаяся тем, что второй статор (26) смещен относительно первого статора (24) радиально на статорный угол ϕSt, а второй ротор (22) повернут относительно первого ротора (20) радиально на роторный угол ϕR, причем для относительного моторного угла справедливо: ΔphM=ϕR-ϕSt.
16. Система по п. 14, отличающаяся тем, что угол ΔphN фазового сдвига является электрическим углом фазового сдвига со стороны сети между вентильными преобразователями (48, 49) частоты.
17. Система по любому из пп. 1-4, отличающаяся тем, что звено (17) имеет нагрузку (17'), которая представляет собой предпочтительно компрессорную систему.
18. Система по любому из пп. 1-4, отличающаяся тем, что оба электродвигателя (12, 14) имеют сообща, по меньшей мере, мощность 60 МВт.
19. Система по любому из пп. 1-4, отличающаяся тем, что первый электродвигатель (12) содержит первый ротор (20) и первый статор (24), а второй электродвигатель (14) - второй ротор (20) и второй статор (26), причем второй ротор (22) не ориентирован радиально по первому ротору (20) и/или второй статор (26) не ориентирован радиально по первому статору (24).
| ЭЛЕКТРОПРИВОД ДЛЯ СОЗДАНИЯ ВРАЩАТЕЛЬНОГО МОМЕНТА И ЕГО СИСТЕМА УПРАВЛЕНИЯ | 2005 |
|
RU2322747C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| DE 3804634 A1, 24.08.1989 | |||
| Фрикционный амортизатор для поглощения вертикальных колебаний вагонов | 1957 |
|
SU113585A1 |
| US 2005067984 A1, 31.03.2005 | |||
| СЦЕНА | 1995 |
|
RU2099124C1 |
| WO 1993005567 A1, 18.03.1993. | |||

