Изобретение относится к горному делу, в частности к разработке полезных ископаемых открытым способом с применением комбинированного транспорта, включающий доставку горной массы автосамосвалами на площадку для перегрузки ее экскаватором в приемный бункер конвейерного или железнодорожного транспорта с последующей транспортировкой горной массы к местам складирования или переработки, и может быть использовано при разработке месторождений с пологим или горизонтальным залеганием полезного ископаемого с вытянутой формой карьера в плане.
Известен способ разработки с применением автомобильно-конвейерного транспорта, где горная масса доставляется от забоев до дробильно-перегрузочного пункта автосамосвалами и после дробления крупных кусков поступает на систему конвейеров. (А.О. Спиваковский, М.Г. Потапов. Транспортные машины и комплексы открытых горных разработок. Учебник для вузов. 4-е изд., перераб. и доп. М., Недра, 1983, стр. 309-311).
Данный способ применяют для разработки месторождений с крутопадающим залеганием полезного ископаемого и крепостью пород, требующих применение буровзрывных работ. Недостатком способа является, то что в рабочей зоне карьера располагаются перегрузочные пункты, дробильные установки и конвейерные линии.
Наиболее близким по технической сущности является способ открытой разработки с применением комбинированного автомобильно-железнодорожного транспорта, который включает отработку группы верхних уступов карьера с погрузкой вскрышных пород в средства железнодорожного транспорта и последующим вывозом их из карьера в отвал. Отработка группы нижних уступов карьера с погрузкой вскрышных пород в автосамосвалы и доставкой их к пунктам перегрузки на экскаваторно-бункерный перегрузочный пункт, состоящий из разгрузочной площадки для автосамосвалов с отвальным и резервным участками, приемной емкости, экскаваторной площадки с размещенным на ней экскаватором-драглайном, погрузочной площадки с бункером и железнодорожными путями (патент РФ №2204720, кл. E21C 41/26, E21C 47/00, 2001).
Недостатком способа является невозможность установки дополнительного перегрузочного экскаватора-драглайна при увеличении производительности карьера, т.к. экскаватор-драглайн установлен в рабочей зоне карьера на временном целике для перегрузки породы в железнодорожный транспорт, а также невозможность применения способа на карьерах со сплошной однобортовой системой разработки и внутренним отвалообразованием.
Задачей настоящего изобретения является вынос транспортных коммуникаций и загрузочного бункера за пределы рабочей зоны верхней группы уступов карьера в зоне действия экскаватора-драглайна и на рабочей площадке нижней группы уступов карьера в зоне действия экскаватора-драглайна или их размещение только за пределами рабочей зоны верхней группы уступов карьера, а также разделение процессов разгрузки автосамосвалов и погрузки горной массы в загрузочный бункер конвейерного или железнодорожного транспорта при отработке месторождений с пологим или горизонтальным залеганием полезного ископаемого с вытянутой формой в плане.
Достигается это тем, что в способе открытой разработки месторождений с применением комбинированного транспорта, включающем отработку верхних и нижних уступов карьера с созданием перегрузочного пункта, состоящего из разгрузочной площадки для автосамосвалов, экскаваторной площадки, загрузочного бункера, железнодорожного пути, согласно изобретению при отработке уступов выемочно-погрузочными машинами породу транспортируют автосамосвалами на перегрузочно-накопительную площадку, где экскаватором-драглайном перегружают в загрузочный бункер конвейерного или железнодорожного транспорта, который располагают за пределами рабочей зоны верхней группы уступов карьера в зоне действия экскаватора-драглайна и на рабочей площадке нижней группы уступов карьера в зоне действия экскаватора-драглайна или только за пределами рабочей зоны верхней группы уступов карьера в зависимости от мощности вскрышной породы, при этом количество экскаваторов-драглайнов определяют из выражения:
 или
или 
где:
nпэ - количество экскаваторов-драглайнов, ед.;
Qвпэ - производительность выемочно-погрузочной машины, м3/год;
Vв - производительность карьера по вскрыше, м3/год;
nвпэ - количество выемочно-погрузочной машины, ед;
kр - коэффициент разрыхления вскрышной породы;
Qпэ - производительность экскаватора-драглайна, м3/год,
по мере подвигания выемочно-погрузочных машин вдоль фронта горных работ экскаватор-драглайн перемещается со скоростью, соответствующей условию ϑпэ<ϑвпэ,
где:
ϑвпэ, ϑпэ - скорость подвигания выемочно-погрузочной машины и экскаватора-драглайна вдоль фронта горных работ, м/см,
при отработке уступов в торце карьера происходит сближение забоев выемочно-погрузочных машин с перегрузочно-накопительной площадкой, экскаватор-драглайн и загрузочный бункер перемещают в обратную сторону вдоль фронта на расстояние  ,
,
где:
Lox - расстояние от торца карьера до экскаватора-драглайна при обратном перемещении вдоль фронта, м;
ϑвпэ, ϑпэ - скорость подвигания выемочно-погрузочной машины и экскаватора-драглайна вдоль фронта горных работ, м/см;
lпп - длина перегрузочно-накопительной площадки, м;
lб - безопасное расстояние между выемочно-погрузочными машинами, расположенными на смежных горизонтах, м;
lmin - минимально возможная длина перегрузочно-накопительной площадки, м;
nвпэ - количество выемочно-погрузочных машин, ед.;


а при условии ϑпэ=ϑвпэ, расстояние от торца карьера до экскаватора-драглайна при обратном движении выемочно-погрузочной машины определяют:

где:
lпп - длина перегрузочно-накопительной площадки, м;
lб - безопасное расстояние между выемочно-погрузочными машинами расположенных на смежных горизонтах, м;
lmin - минимально возможная длина перегрузочно-накопительной площадки, м;
nвпэ - количество выемочно-погрузочных машин, ед.;
при этом длину перегрузочно-накопительной площадки определяют из условия:

где:
lпп - длина перегрузочно-накопительной площадки, м;
Rр - радиус действия экскаватора-драглайна, м;
bп - ширина бермы безопасности (ширина призмы возможного обрушения);
Шрч - ширина зоны перегрузочно-накопительной площадки для разгрузки автотранспорта, м,
а длину перегрузочно-накопительной площадки при перестановке экскаватора-драглайна в торец определяют из условия:
где:
lпп - длина перегрузочно-накопительной площадки в торце карьера, м;
Rр - радиус действия экскаватора-драглайна, м;
bп - ширина бермы безопасности (ширина призмы возможного обрушения),
отсюда площадь перегрузочно-накопительной площадки определяют из условия:

где:
Sпп - площадь перегрузочно-накопительной площадки, м2;
lпп - длина перегрузочно-накопительной площадки, м;
Rр - радиус действия экскаватора-драглайна, м;
bп - ширина бермы безопасности (ширина призмы возможного обрушения);
Шрч - ширина зоны перегрузочно-накопительной площадки для разгрузки автотранспорта, м,
и объем вскрыши, размещаемый на перегрузочно-накопительной площадке, определяют из условия:
Vпп=Sпп·hсл·kно
где:
Sпп - площадь перегрузочно-накопительной площадки, м2;
hсл - мощность слоя, м;
kно - коэффициент непостоянности мощности слоя при разгрузке автосамосвалов, 0,5-0,9.
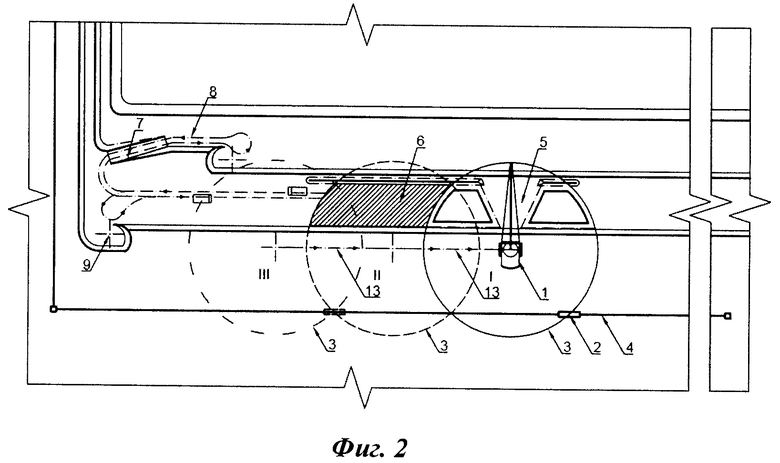
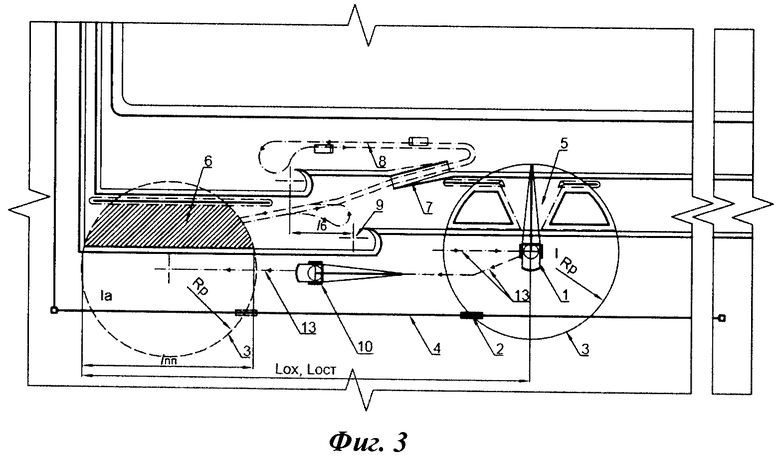
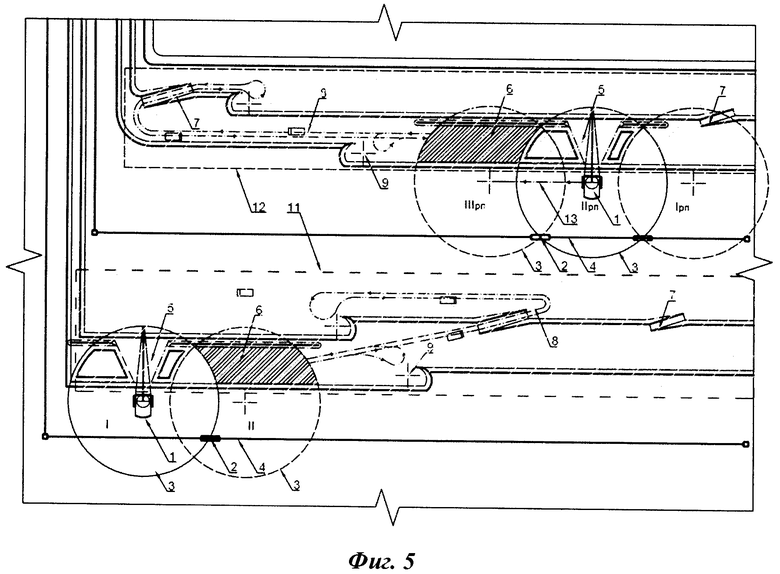
Данный способ иллюстрируется на фиг. 1-5: фиг. 1 - расстановка оборудования на уступах и порядок его перемещения вдоль фронта горных работ, фиг. 2 - расстановка оборудования на уступах и порядок его перемещения при врезке в новую заходку выемочно-погрузочной машины, фиг. 3 - работа перегрузочного экскаватора в новой заходке с минимальной длиной площадки, образуемой при отходе выемочно-погрузочной машины от торца карьера, фиг. 4 - перегрузочный экскаватор в новой заходке, фиг. 5 - разработка месторождения несколькими рабочими зонами в карьере с применением комбинированного транспорта,
где:
1 - перегрузочный экскаватор-драглайн, 2 - загрузочный бункер;
3 - зона действия экскаватора-драглайна; 4 - конвейерный или железнодорожный транспорт; 5 - площадка для работы экскаватора-драглайна;
6 - разгрузочная площадка для автотранспорта; 7 - транспортный съезд;
8 - ось хода автосамосвалов; 9 - выемочно-погрузочная машина;
10 - перегрузочный экскаватор-драглайн в перегоне;
11, 12 - рабочие зоны верхней и нижней групп уступов;
13 - ось хода экскаватора-драглайна;
I, Ia, II, III - место стояния экскаватора-драглайна на поверхности;
Iрп, Iaрп, IIрп, IIIрп - место стояния экскаватора-драглайна на рабочей площадке;
Перегрузочно-накопительная площадка состоит из двух площадок: площадки для работы экскаватора-драглайна 5 и разгрузочной площадки для автотранспорта 6. По мере перегрузки породы с площадки 5 и заполнения породой площадки 6, экскаватор-драглайн 1 и при необходимости загрузочный бункер 2 перемещаются на новое место стояния (II, III; IIрп, IIIрп). Разгрузочная площадка, перегрузочный экскаватор и бункер перемещаются за выемочно-погрузочной машиной 9 вдоль фронта горных работ (фиг. 1). Автотранспорт перемещается к разгрузочной площадке 6 по рабочей площадке и по стационарным или временным съездам 7.
Способ реализуется следующим образом:
Перегрузку породы осуществляют экскаватором-драглайном, установленным на поверхности, на верхней площадке уступа относительно перегрузочно-накопительной площадки, а конвейерный или железнодорожный транспорт располагают за пределами рабочей зоны верхней группы уступов карьера в зоне действия экскаватора-драглайна и на рабочей площадке нижней группы уступов карьера в зоне действия экскаватора-драглайна или только за пределами рабочей зоны верхней группы уступов карьера, при этом количество экскаваторов-драглайнов в карьере определяется из выражения (1).
Определение количества экскаваторов-драглайнов

где:
nпэ - количество экскаваторов-драглайнов, ед.;
Qвпэ - производительность выемочно-погрузочной машины, м3/год;
Vв - производительность карьера по вскрыше, м3/год;
nвпэ - количество выемочно-погрузочных машин, ед.;
kр - коэффициент разрыхления вскрышной породы;
Qпэ - производительность экскаватора-драглайна, м3/год.
Вскрышные работы в карьере ведут выемочно-погрузочными машинами с погрузкой в автосамосвалы, которые транспортируют породу на перегрузочно-накопительную площадку, где экскаватором-драглайном порода с площадки перегружается в загрузочный бункер конвейерного или железнодорожного транспорта, как показано на фиг. 1, 2, 3, 4, 5. Экскаватор-драглайн располагается на поверхности в месте стояния I, Ia, II, III, а также может располагаться на рабочей площадке рабочего горизонта нижней группы уступов в месте стояния Iрп, Iaрп, IIрп, IIIрп. При ведении горных работ в торце карьера происходит сближение забоев выемочно-погрузочных машин с перегрузочно-накопительной площадкой, экскаватор-драглайн 1 и загрузочный бункер 2 перемещаются в обратную сторону вдоль фронта на расстояние Lox (фиг. 3) (2), измеряемое от торца при условии ϑпэ<ϑвпэ, или останавливают перемещение на расстоянии Lост (фиг. 3) (3), измеряемом от торца при условии ϑпэ=ϑвпэ. При отходе забоев выемочно-погрузочных машин от торца на безопасное расстояние экскаватор-драглайн и загрузочный бункер перемещаются в торец карьера, где для него уже сформирован автосамосвалами объем работы (фиг. 3) (7).
Расстояние обратного хода перегрузочного экскаватора-драглайна от торца карьера при обратном движении выемочно-погрузочной машины определяют из условия:

где:
Lox - расстояние от торца карьера до экскаватора-драглайна при обратном перемещении вдоль фронта, м;
ϑвпэ, ϑпэ - скорость подвигания выемочно-погрузочной машины и экскаватора-драглайна вдоль фронта горных работ, м/см,
lпп - длина перегрузочно-накопительной площадки, м;
lб - безопасное расстояние между выемочно-погрузочными машинами, расположенными на смежных горизонтах, м;
lmin - минимально возможная длина перегрузочно-накопительной площадки, м;
nвпэ - количество выемочно-погрузочных машин, ед.;
Расстояние от торца карьера до экскаватора-драглайна при обратном движении выемочно-погрузочной машины:

где:
lпп - длина перегрузочно-накопительной площадки (4, 5), м;
lб - безопасное расстояние между выемочно-погрузочными машинами, расположенными на смежных горизонтах, м;

где
Rр - радиус действия экскаватора-драглайна, м;
bп - ширина бермы безопасности (ширина призмы возможного обрушения);
Шрч - ширина зоны перегрузочно-накопительной площадки для разгрузки автотранспорта, м,
а длину перегрузочно-накопительной площадки при перестановке экскаватора-драглайна в торец определяют из условия:

Отсюда площадь перегрузочно-накопительной площадки определяют из условия:

и объем вскрыши, размещаемый на перегрузочно-накопительной площадке, определяют из условия:

где:
hсл - мощность слоя, м;
kно - коэффициент непостоянности мощности слоя при разгрузке автосамосвалов, 0,5-0,9.
Предлагаемый способ разработки заключается в перегрузке экскаватором-драглайном породы с перегрузочно-накопительной площадки в конвейерный или железнодорожный транспорт, которые располагают за пределами рабочей зоны верхней группы уступов карьера в зоне действия экскаватора-драглайна и на рабочей площадке нижней группы уступов карьера в зоне действия экскаватора-драглайна или только за пределами рабочей зоны верхней группы уступов карьера, а также при подвигании забоев с выемочно-погрузочными машинами вдоль фронта горных работ перегрузочно-накопительная площадка и экскаватор-драглайн и загрузочный бункер перемещаются за ними.
Технический результат достигается за счет размещения конвейерного или железнодорожного транспорта за пределами рабочей зоны верхней группы уступов карьера в зоне действия экскаватора-драглайна и расположения на рабочей площадке нижней группы уступов карьера в зоне действия экскаватора-драглайна или расположения только за пределами рабочей зоны верхней группы уступов карьера, а также разделения процессов разгрузки автосамосвалов и погрузки горной массы в загрузочный бункер конвейерного или железнодорожного транспорта, а также за счет сокращения капитальных затрат на приобретение забойных конвейерных линий для каждой выемочно-погрузочной машины, перегружателей и эксплуатационных затрат на обслуживание этого оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И ЭКСКАВАТОРНО-БУНКЕРНЫЙ ПЕРЕГРУЗОЧНЫЙ ПУНКТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2204720C2 |
| СПОСОБ ПОДГОТОВКИ НОВОГО ТРАНСПОРТНОГО ГОРИЗОНТА И ЭКСКАВАТОРНО-ЖЕЛЕЗНОДОРОЖНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2186982C1 |
| СПОСОБ ПЕРЕГРУЗКИ ГОРНОЙ МАССЫ ПРИ КОМБИНИРОВАННОМ АВТОМОБИЛЬНО-ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 2009 |
|
RU2395443C1 |
| Перегрузочный пункт скальной породы в карьере | 1990 |
|
SU1765414A1 |
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ КРУТОПАДАЮЩИХ РУДНЫХ ТЕЛ | 2014 |
|
RU2571776C1 |
| СПОСОБ ВСКРЫТИЯ И РАЗРАБОТКИ ВЫТЯНУТЫХ ПО ПРОСТИРАНИЮ И ПАДЕНИЮ УГОЛЬНЫХ МЕСТОРОЖДЕНИЙ С ПОЛОГОПАДАЮЩИМИ И НАКЛОННЫМИ ПЛАСТАМИ БОЛЬШОЙ МОЩНОСТИ | 2003 |
|
RU2231642C1 |
| Экскаватор-драглайн | 1990 |
|
SU1728394A1 |
| СПОСОБ ФОРМИРОВАНИЯ КАРЬЕРНОГО ПЕРЕГРУЗОЧНОГО ПУНКТА | 1992 |
|
RU2039267C1 |
| Способ открытой разработки месторождений полезных ископаемых | 1983 |
|
SU1112122A1 |
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ КРУТОПАДАЮЩИХ МЕСТОРОЖДЕНИЙ | 2005 |
|
RU2294434C1 |

Изобретение относится к горному делу, в частности к разработке полезных ископаемых открытым способом с применением комбинированного транспорта, и может быть использовано при разработке месторождений с пологим или горизонтальным залеганием полезного ископаемого с вытянутой формой карьера в плане. Техническим результатом является вынос транспортных коммуникаций и загрузочного бункера за пределы рабочей зоны верхней группы уступов карьера в зоне действия экскаватора-драглайна и на рабочей площадке нижней группы уступов карьера в зоне действия экскаватора-драглайна или их размещение только за пределами рабочей зоны верхней группы уступов карьера, а также разделение процессов разгрузки автосамосвалов и погрузки горной массы в загрузочный бункер конвейерного или железнодорожного транспорта при отработке месторождений с пологим или горизонтальным залеганием полезного ископаемого с вытянутой формой в плане. Способ включает отработку верхних и нижних уступов карьера с созданием перегрузочного пункта, состоящего из разгрузочной площадки для автосамосвалов, экскаваторной площадки, загрузочного бункера, железнодорожного пути, согласно изобретению отрабатывают уступы выемочно-погрузочными машинами, породу транспортируют автосамосвалами, на перегрузочно-накопительную площадку, где с помощью экскаватора-драглайна перегружают в загрузочный бункер конвейерного или железнодорожного транспорта, которые располагают за пределами рабочей зоны верхней группы уступов карьера в зоне действия экскаватора-драглайна и на рабочей площадке нижней группы уступов карьера в зоне действия экскаватора-драглайна или только за пределами рабочей зоны верхней группы уступов карьера в зависимости от мощности вскрышной породы. Определяют количество экскаваторов-драглайнов, величину перегрузочно-накопительной площадки и объем вскрыши, размещаемый на перегрузочно-накопительной площадке. 5 ил.
Способ открытой разработки месторождений с применением комбинированного транспорта, включающий отработку верхних и нижних уступов карьера с созданием перегрузочного пункта, состоящего из разгрузочной площадки для автосамосвалов, экскаваторной площадки, загрузочного бункера, железнодорожного пути, отличающийся тем, что отрабатывают уступы выемочно-погрузочными машинами, породу транспортируют автосамосвалами, на перегрузочно-накопительную площадку, где с помощью экскаватора-драглайна перегружают в загрузочный бункер конвейерного или железнодорожного транспорта, которые располагают за пределами рабочей зоны верхней группы уступов карьера в зоне действия экскаватора-драглайна и на рабочей площадке нижней группы уступов карьера в зоне действия экскаватора-драглайна или только за пределами рабочей зоны верхней группы уступов карьера в зависимости от мощности вскрышной породы, при этом количество экскаваторов-драглайнов определяют из выражения:

где:
nпэ - количество экскаваторов-драглайнов, ед.;
Qвпэ - производительность выемочно-погрузочной машины, м3/год;
Vв - производительность карьера по вскрыше, м3/год;
nвпэ - количество выемочно-погрузочных машин, ед.;
kр - коэффициент разрыхления вскрышной породы;
Qпэ - производительность экскаватора-драглайна, м3/год,
причем перемещение экскаватора-драглайна и выемочно-погрузочной машины вдоль фронта горных работ осуществляют со скоростью, соответствующей условию: ϑпэ<ϑвпэ,
где:
ϑвпэ, ϑпэ - скорость подвигания выемочно-погрузочной машины и экскаватора-драглайна вдоль фронта горных работ, м/см,
а, при отработке уступов в торце карьера, экскаватор-драглайн и загрузочный бункер перемещают в обратную сторону вдоль фронта работ на расстояние:

где:
Lох - расстояние от торца карьера до экскаватора-драглайна при обратном перемещении вдоль фронта, м;
ϑвпэ, ϑпэ - скорость подвигания выемочно-погрузочной машины и экскаватора-драглайна вдоль фронта горных работ, м/см;
lпп - длина перегрузочно-накопительной площадки, м;
lб - безопасное расстояние между выемочно-погрузочными машинами, расположенными на смежных горизонтах, м;
lmin - минимально возможная длина перегрузочно-накопительной площадки, м;
nвпэ - количество выемочно-погрузочных машин, ед.;


а при условии: ϑпэ=ϑвпэ расстояние от торца карьера до экскаватора-драглайна при обратном движении выемочно-погрузочной машины определяют:

где:
lпп - длина перегрузочно-накопительной площадки, м;
lб - безопасное расстояние между выемочно-погрузочными машинами, расположенными на смежных горизонтах, м;
lmin - минимально возможная длина перегрузочно-накопительной площадки, м;

nвпэ - количество выемочно-погрузочных машин, ед.;

при этом длину перегрузочно-накопительной площадки определяют из условия:

где:
lпп - длина перегрузочно-накопительной площадки, м;
Rр - радиус действия экскаватора-драглайна, м;
bп - ширина бермы безопасности (ширина призмы возможного обрушения);
Шрч - ширина зоны перегрузочно-накопительной площадки для разгрузки автотранспорта, м,
а длину перегрузочно-накопительной площадки при перестановке экскаватора-драглайна в торец определяют из условия: 
где:
lпп - длина перегрузочно-накопительной площадки в торце карьера, м;
Rр - радиус действия экскаватора-драглайна, м;
bп - ширина бермы безопасности (ширина призмы возможного обрушения),
отсюда площадь перегрузочно-накопительной площадки определяют из условия:

где:
Sпп - площадь перегрузочно-накопительной площадки, м2;
lпп - длина перегрузочно-накопительной площадки, м;
Rр - радиус действия экскаватора-драглайна, м;
bп - ширина бермы безопасности (ширина призмы возможного обрушения);
Шрч - ширина зоны перегрузочно-накопительной площадки для разгрузки автотранспорта, м,
и объем вскрыши, размещаемый на перегрузочно-накопительной площадке, определяют из условия: Vпп=Sпп·hсл·kно
где:
Sпп - площадь перегрузочно-накопительной площадки, м2;
hсл - мощность слоя, м,
kно - коэффициент непостоянности мощности слоя при разгрузке автосамосвалов, 0,5-0,9.
| СПОСОБ ОТКРЫТОЙ РАЗРАБОТКИ МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ И ЭКСКАВАТОРНО-БУНКЕРНЫЙ ПЕРЕГРУЗОЧНЫЙ ПУНКТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2204720C2 |
| ЭКСКАВАЦИОННО-ПОГРУЗОЧНЫЙ КОМПЛЕКС НА ОСНОВЕ ДРАГЛАЙНА | 1993 |
|
RU2099475C1 |
| WO 1999005396 A1, 04.02.1999 | |||
| УЗЕЛ КЛАПАНА ДЛЯ РЕГУЛИРОВАНИЯ ПОДАЧИ ГОРЮЧЕГО ГАЗА | 2002 |
|
RU2280212C2 |

