Изобретение относится к космонавтике, в частности к управлению космическим аппаратом (КА) на внеатмосферном участке его схода с орбиты искусственного спутника Земли (ИСЗ) посредством управления вектором тяги двигательной установки (ДУ), обеспечивающего минимизацию потребных энергетических затрат.
Известен способ управления космического аппарата при спуске с орбиты искусственного спутника Земли, обеспечивающий сход аппарата с орбиты, перевод его на траекторию снижения, вход в атмосферу Земли, описанный в работе - Навигационное обеспечение полета орбитального комплекса «Салют-6»-«Союз»-«Прогресс», под редакцией Б.Н. Петрова и И.К. Бажинова, М.: «Наука», 1985, стр.273-285 - [1]. Указанный способ заключается в одноразовом включении тяги двигательной установки, направленной против вектора скорости космического аппарата. При отработке заданной величины импульса характеристической скорости обеспечивается гашение скорости космического аппарата до заданного значения и его последующий вход в атмосферу Земли с требуемой скоростью.
Основной недостаток данного способа заключается в следующем. Подаваемый импульс характеристической скорости ориентирован строго против вектора скорости космического аппарата. Такая программа управления тягой двигательной установки принципиально не позволяет одновременно обеспечить, как заданное значение скорости, так и значение угла наклона вектора скорости к местному горизонту (траекторного угла) при входе космического аппарата в атмосферу Земли. При применении такого способа обеспечивается либо только заданная скорость, либо только заданный траекторный угол. Это может привести к достаточно большим отклонениям точек посадки космического аппарата от номинальных или к необходимости введения дополнительных управляющих воздействий (ракетодинамических или аэродинамических) на атмосферном участке спуска. Следует отметить, что реализация такого способа для аппаратов баллистического типа, не предусматривающих возможность управления в атмосфере, сопряжена с большими сложностями при обеспечении точной посадки на полигоны малых размеров.
Принципиально сход космического аппарата с орбиты искусственного спутника Земли и его перевод на орбиту снижения с заданными характеристиками может быть осуществлен с использованием управления двигательной установкой малой тяги. Такой способ состоит в отработке продолжительного ракетодинамического участка полета с переменной ориентацией вектора тяги двигательной установки, описанный в работе - К.В. Петрухина, В.В. Салмин. Оптимизация баллистических схем перелетов между некомпланарными орбитами с помощью комбинации двигателей большой и малой тяги. Известия Самарского научного центра Российской академии наук, т.12, №4, 2010, стр.189-193 - [2]. При осуществлении такой схемы обеспечивается возможность перевода космического аппарата на переходную орбиту с последующим входом в атмосферу Земли с заданными значениями скорости и траекторного угла, что является важной предпосылкой для осуществления точной посадки на полигоны с заданными географическими координатами.
Недостатки этого способа заключаются в следующем. Во-первых, для обеспечения требуемых условий гашения скорости космического аппарата должны быть реализованы достаточно протяженные участки с работающей двигательной установкой, достигающие в ряде случаев нескольких витков. Это существенно снижает быстродействие спуска космического аппарата. Во-вторых, для отработки длительного ракетодинамического маневра необходима установка на борту космического аппарата высокоэффективной бортовой системы управления, обеспечивающей непрерывное формирование и отработку программ управления вектором тяги двигательной установки в зависимости от текущих параметров полета. Погрешности при проведении этих операций могут привести к невыполнению требований к условиям входа космического аппарата в атмосферу Земли и, соответственно, к большим отклонениям мест посадок от заданных.
Наиболее близким по технической сущности и достигаемому результату к заявляемому способу управления спуском космического аппарата с орбиты искусственного спутника Земли, обеспечивающему снижение потребных энергозатрат на осуществление ракетодинамического маневра для перевода космического аппарата на траекторию снижения, а также высокую точность входа космического аппарата в атмосферу, является способ, описанный в работе. Н.М. Иванов, А.И. Мартынов. Управление движением космических аппаратов в атмосфере. М.: «Наука», 1977, стр.393-397 - [3], который выбран прототипом. Данный способ управления заключается во включении тяги двигательной установки космического аппарата для снижения его скорости и перевода на траекторию схода. При этом вектор тяги направлен под углом α к вектору скорости космического аппарата, лежащим в диапазоне 180°<α<270° (фиг.2). Такое включение двигательной установки обеспечивает как гашение скорости пропорционально проекции подаваемого импульса характеристической скорости на вектор скорости КА ΔVx=|ΔVcosα|, так и требуемую крутизну снижения космического аппарата, определяемую величиной вертикальной составляющей тормозного импульса ΔVy=|ΔVsinα|. При работающей двигательной установке определяют текущие значения скорости, высоты полета, угла наклона вектора скорости к местному горизонту и после отработки заданной величины импульса характеристической скорости выключают двигательную установку. Таким образом, варьируя два параметра: величину импульса скорости ΔV и угол его наклона к вектору скорости α обеспечивают сход с орбиты КА и последующий его вход в атмосферу Земли с заданными значениями скорости полета космического аппарата Vвх зад и траекторного угла θвх зад.
Недостаток данного способа заключается в том, что при его осуществлении имеет место перерасход потребных энергетических затрат. Это объясняется тем, что коррекция траектории движения космического аппарата (как по скорости, так и по траекторному углу) осуществляется непосредственно на спутниковой орбите, где скорость полета космического аппарата достаточна высока. В этих условиях подача импульса характеристической скорости ΔV под углом α к вектору скорости для обеспечения требуемой крутизны траектории спуска и заданного значения траекторного угла космического аппарата при его входе в атмосферу Земли приводит к созданию достаточно большой вертикальной составляющей ΔVy. При этом чем больше отклонение вектора тяги двигательной установки от оси, противоположной вектору скорости космического аппарата, тем больше перерасход потребных энергозатрат. Резерв в снижении потребных энергозатрат связан с обеспечением требуемой крутизны траектории спуска за счет проведения ракетодинамического маневра при меньших значениях скорости полета по сравнению с орбитальной (при входе космического аппарата в атмосферу).
Сущность изобретения заключается в проведении двухразового включения двигательной установки. Первое включение осуществляется при нахождении космического аппарата на орбите искусственного спутника Земли: вектор тяги направлен строго против вектора скорости, что обеспечивает наиболее эффективное торможение космического аппарата. Величина подаваемого первого импульса характеристической скорости определяется тем, что после отработки этого импульса и пассивного полета космического аппарата осуществляется его вход в атмосферу с заданной скоростью. Второй импульс характеристической скорости подается при входе космического аппарата в атмосферу с целью достижения требуемого значения угла наклона вектора скорости к местному горизонту. Вектор тяги ориентирован в направлении, перпендикулярном вектору скорости космического аппарата - против часовой стрелки, если траекторный угол до проведения импульса меньше заданного или по часовой стрелке, если траекторный угол больше заданного; при равенстве траекторного угла и заданного второй импульс характеристической скорости не подается. При выполнении такой программы включений двигательной установки скорость полета космического аппарата не меняется. При такой схеме суммарные потребные энергозатраты, несмотря на проведение двух импульсов характеристической скорости, будут меньше, чем при использовании одноразового включения двигательной установки, описанного в способе-прототипе. Это объясняется тем, что коррекция крутизны траектории полета космического аппарата осуществляется при его входе в атмосферу Земли, где скорость космического аппарата меньше орбитальной (в способе-прототипе крутизна траектории полета обеспечивается путем реализации импульса скорости непосредственно на спутниковой орбите). Другим преимуществом предлагаемого способа является то, что после отработки первого импульса характеристической скорости существует принципиальная возможность определить текущие значения скорости, траекторного угла и высоты полета космического аппарата. Это позволяет скорректировать параметры второго импульса характеристической скорости и тем самым обеспечить требуемую точность входа космического аппарата в атмосферу и его посадки на заданный полигон.
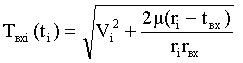
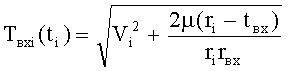
Также сущность изобретения - способа управления сходом космического аппарата с орбиты искусственного спутника Земли заключается в движении космического аппарата при его сходе с орбиты искусственного спутника Земли по траектории, состоящей из первого участка активного полета космического аппарата с включенной двигательной установкой, обеспечивающей подачу первого импульса характеристической скорости ΔV1, и первого участка пассивного полета космического аппарата с выключенной двигательной установкой, при этом включение двигательной установки осуществляют на орбите искусственного спутника Земли, по которой космический аппарат движется со скоростью V1, а выключение - в момент времени завершения отработки первого импульса характеристической скорости ΔV1, определении при движении космического аппарата по первому участку активного полета текущих значений его скорости V1, высоты полета hi и угла наклона вектора скорости космического аппарата к местному горизонту θi, отличающийся тем, что формируют направление вектора первого импульса характеристической скорости ΔV1 противоположным направлению вектора скорости V1 космического аппарата на орбите искусственного спутника Земли, а траектория движения космического аппарата при его сходе с орбиты искусственного спутника Земли содержит второй участок активного полета космического аппарата с включенной двигательной установкой, обеспечивающей подачу второго импульса характеристической скорости ΔV2, и второй участок пассивного полета космического аппарата с выключенной двигательной установкой, при этом при движении космического аппарата по первому участку активного полета определяют скорость космического аппарата Твхi(ti) на момент его входа в атмосферу Земли в зависимости от текущих значений скорости Vi и высоты hi при условии выключения двигательной установки в момент времени ti в соответствии с выражением:
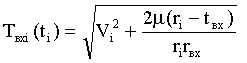
где ri=R+hi;
rвх=R+hвх;
Твхi(ti) - скорость космического аппарата на момент его входа в атмосферу Земли при условии выключения двигательной установки в момент времени ti;
Vi - текущее значение скорости полета космического аппарата в момент времени ti;
hi - текущее значение высоты полета космического аппарата в момент времени ti;
µ - произведение гравитационной постоянной на массу Земли;
R - средний радиус Земли;
hвх=100 км - высота входа космического аппарата в атмосферу Земли, равная высоте условной границы атмосферы Земли,
i=1, 2, 3, …,
и при выполнении условия:
Твхi(ti)=Vвх зад,
где Твхi(ti) - скорость космического аппарата на момент его входа в атмосферу Земли при условии выключения двигательной установки в момент времени ti;
Vвх зад - заданная величина скорости космического аппарата на момент его входа в атмосферу Земли,
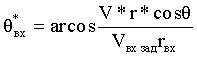
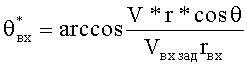
выключают двигательную установку космического аппарата, при этом в момент выключения его двигательной установки измеряют значения высоты полета космического аппарата h*, угла наклона его вектора скорости к местному горизонту θ* и скорости V* полета космического аппарата с последующим определением величины угла наклона его вектора скорости к местному горизонту 
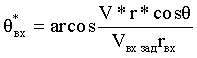
где r*=R+h*; rвх=R+hвх;
V* - скорость космического аппарата в момент выключения двигательной установки;
θ* - угол наклона вектора скорости космического аппарата к местному горизонту в момент выключения двигательной установки;
h* - высота полета космического аппарата в момент выключения двигательной установки;
Vвх зад - заданная величина скорости космического аппарата при его входе в атмосферу Земли,
R - средний радиус Земли;
hвх = 100 км - высота входа космического аппарата в атмосферу, равная высоте условной границы атмосферы Земли,
и осуществляют полет космического аппарата с выключенной двигательной установкой; при выполнении условий:
hi=hвх,
где ht - текущее значение высоты полета космического аппарата;
hвх - 100 км - высота входа космического аппарата в атмосферу, равная высоте условной границы атмосферы Земли,

θвх зад - заданная величина угла наклона вектора скорости космического аппарата к местному горизонту при его входе в атмосферу Земли,
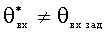
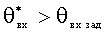
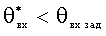
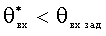
включают двигательную установку, обеспечивающую подачу второго импульса характеристической скорости ΔV2 космического аппарата в плоскости его движения перпендикулярно вектору скорости движения космического аппарата, при этом при выполнении условия:

где
θвх зад - заданная величина угла наклона вектора скорости космического аппарата к местному горизонту при его входе в атмосферу Земли,
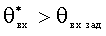
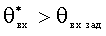
вектор второго импульса характеристической скорости ΔV2 космического аппарата ориентирован в направлении от Земли или при выполнении условия:
где
θвх зад - заданная величина угла наклона вектора скорости космического аппарата к местному горизонту при его входе в атмосферу Земли,
вектор второго импульса характеристической скорости ΔV2 космического аппарата ориентирован в направлении к Земле; осуществляют движение космического аппарата с работающей двигательной установкой и измеряют текущие значения угла наклона вектора скорости космического аппарата к местному горизонту θвхj - и при выполнении условия:
θвхj=θвх зад
где θвхj - текущее значение угла наклона вектора скорости космического аппарата к местному горизонту при работающей двигательной установке в момент tj, где j=1,2,3,…;
θвх зад - заданная величина угла наклона вектора скорости КА к местному горизонту при входе космического аппарата в атмосферу,
Выключают двигательную установку космического аппарата, который продолжает движение по второму участку пассивного полета космического аппарата с выключенной двигательной установкой.
Техническим результатом предлагаемого способа управления сходом космического аппарата с орбиты искусственного спутника Земли посредством управления вектором тяги двигательной установки на внеатмосферном участке спуска является минимизация потребных энергозатрат на осуществление ракетодинамического маневра для перевода космического аппарата на траекторию снижения, а также повышение точности входа космического аппарата в атмосферу Земли и его посадки на заданный полигон. Это позволяет оптимизировать общий весовой баланс космического аппарата, увеличив в нем долю весовой составляющей полезных нагрузок, что повышает эффективность выполнения целевых программ.
Таким образом, технический результат достигается тем, что в известном способе управления сходом космического аппарата с орбиты искусственного спутника Земли, заключающемся в движении космического аппарата при его сходе с орбиты искусственного спутника Земли по траектории, состоящей из первого участка активного полета космического аппарата с включенной двигательной установкой, обеспечивающей подачу первого импульса характеристической скорости ΔV1, и первого участка пассивного полета космического аппарата с выключенной двигательной установкой, при этом включение двигательной установки осуществляют на орбите искусственного спутника Земли, по которой космический аппарат движется со скоростью V1, а выключение - в момент времени завершения отработки первого импульса характеристической скорости ΔV1, определении при движении космического аппарата по первому участку активного полета текущих значений его скорости V1, высоты полета hi и угла наклона вектора скорости космического аппарата к местному горизонту θi, отличающийся тем, что формируют направление вектора первого импульса характеристической скорости ΔV1 противоположным направлению вектора скорости V1 космического аппарата на орбите искусственного спутника Земли, а траектория движения космического аппарата при его сходе с орбиты искусственного спутника Земли содержит второй участок активного полета космического аппарата с включенной двигательной установкой, обеспечивающей подачу второго импульса характеристической скорости ΔV2, и второй участок пассивного полета космического аппарата с выключенной двигательной установкой, при этом при движении космического аппарата по первому участку активного полета определяют скорость космического аппарата Твхi(ti) на момент его входа в атмосферу Земли в зависимости от текущих значений скорости Vi и высоты hi при условии выключения двигательной установки в момент времени ti в соответствии с выражением:
где ri=R+hi; rвх=R+hвх;
Твхi(ti) - скорость космического аппарата на момент его входа в атмосферу Земли при условии выключения двигательной установки в момент времени ti;
Vi - текущее значение скорости полета космического аппарата в момент времени ti;
hi - текущее значение высоты полета космического аппарата в момент времени ti;
µ - произведение гравитационной постоянной на массу Земли;
R - средний радиус Земли;
hвх=100 км - высота входа космического аппарата в атмосферу Земли, равная высоте условной границы атмосферы Земли,
i=1,2,3, …,
и при выполнении условия:
Твхi(ti)=Vвх зад,
где Твхi(ti) - скорость космического аппарата на момент его входа в атмосферу Земли при условии выключения двигательной установки в момент времени ti;
Vвх зад - заданная величина скорости космического аппарата на момент его входа в атмосферу Земли,
выключают двигательную установку космического аппарата, при этом в момент выключения его двигательной установки измеряют значения высоты полета космического аппарата h*, угла наклона его вектора скорости к местному горизонту θ* и скорости V* полета космического аппарата с последующим определением величины угла наклона его вектора скорости к местному горизонту 
где r*=R+h*; rвх=R+hвх;
V* - скорость космического аппарата в момент выключения двигательной установки;
θ* - угол наклона вектора скорости космического аппарата к местному горизонту в момент выключения двигательной установки;
h* - высота полета космического аппарата в момент выключения двигательной установки;
Vвх зад - заданная величина скорости космического аппарата при его входе в атмосферу Земли,
R - средний радиус Земли;
hвх = 100 км - высота входа космического аппарата в атмосферу, равная высоте условной границы атмосферы Земли,
и осуществляют полет космического аппарата с выключенной двигательной установкой; при выполнении условий:
hi=hвх,
где hi - текущее значение высоты полета космического аппарата;
hвх = 100 км - высота входа космического аппарата в атмосферу, равная высоте условной границы атмосферы Земли,
θвх зад - заданная величина угла наклона вектора скорости космического аппарата к местному горизонту при его входе в атмосферу Земли,
включают двигательную установку, обеспечивающую подачу второго импульса характеристической скорости ΔV2 космического аппарата в плоскости его движения перпендикулярно вектору скорости движения космического аппарата, при этом при выполнении условия:
где
θвх зад - заданная величина угла наклона вектора скорости космического аппарата к местному горизонту при его входе в атмосферу Земли,
вектор второго импульса характеристической скорости ΔV2 космического аппарата ориентирован в направлении от Земли или при выполнении условия:
где
θвх зад _ заданная величина угла наклона вектора скорости космического аппарата к местному горизонту при его входе в атмосферу Земли,
вектор второго импульса характеристической скорости ΔV2 космического аппарата ориентирован в направлении к Земле; осуществляют движение космического аппарата с работающей двигательной установкой и измеряют текущие значения угла наклона вектора скорости космического аппарата к местному горизонту θвхj - и при выполнении условия:
где θвхj - текущее значение угла наклона вектора скорости космического аппарата к местному горизонту при работающей двигательной установке в момент tj, где j = 1,2,3,…;
θвх зад - заданная величина угла наклона вектора скорости КА к местному горизонту при входе космического аппарата в атмосферу, выключают двигательную установку космического аппарата, который продолжает движение по второму участку пассивного полета космического аппарата с выключенной двигательной установкой.
Проведенные расчеты показывают, что в зависимости от высот орбит искусственного спутника Земли, характеристик двигательной установки и условий входа космического аппарата в атмосферу Земли обеспечивается снижение затрат топлива до 10÷12% по сравнению с использованием способа-прототипа. Выигрыш в массе расходуемого топлива Δmт увеличивается при более крутых траекториях входа космического аппарата в атмосферу Земли, при больших начальных массах орбитальных аппаратов m0 и скоростей входа в атмосферу Vвх, а также при меньших высотах орбит h0. Так, увеличение абсолютных значений углов входа космических аппаратов в атмосферу θвх от 5° до 15° приводит к росту массы Δmт от 45 кг до 105 кг, возрастание скоростей Vвх от 7,2 км/с до 7,6 км/с - к росту Δmт от 35 кг до 210 кг, уменьшение высоты орбиты h0 от 600 км до 350 км - к увеличению Δmт от 30 кг до 90 кг. При проведении расчетов начальная масса орбитального космического аппарата m0 принималась равной 2000 кг. Увеличение массы m0 от 1500 кг до 2500 кг приводит к росту выигрыша в массе Δmт от 40 кг до 270 кг.
Указанный технический результат достигается за счет управления двигательной установкой в зависимости от измеряемых текущих навигационных параметров и отработки рациональных программ управления вектором тяги двигателей.
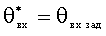
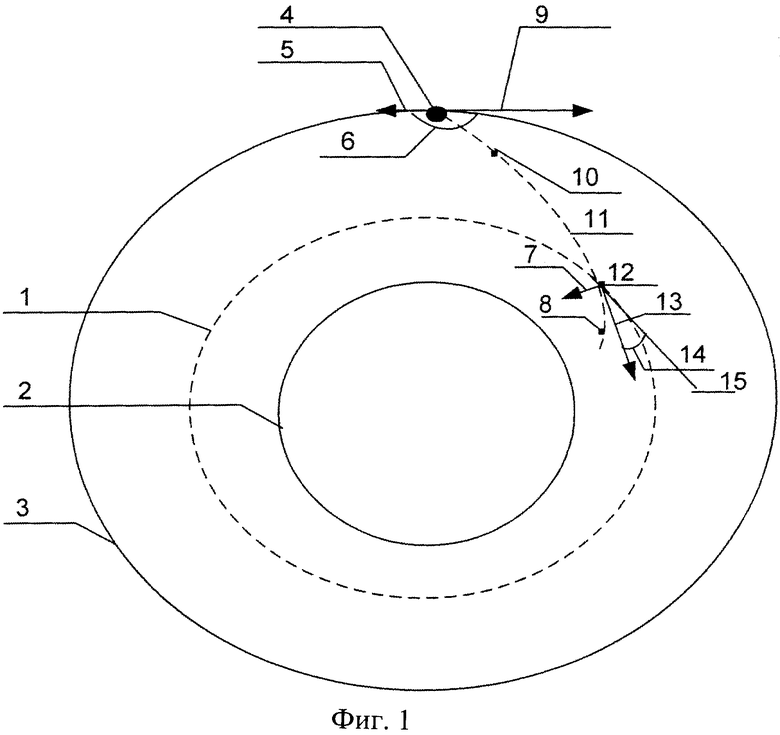
Заявленный способ управления спуском космического аппарата с орбиты искусственного спутника Земли поясняется следующими фигурами.
На фиг.1 приведена схема реализации заявленного способа управления сходом космического аппарата с орбиты искусственного спутника Земли.
На фиг.2 приведена схема реализации способа-прототипа управления сходом космического аппарата с орбиты искусственного спутника Земли.
На фиг.1 и фиг.2, а также в тексте приняты следующие обозначения:
1 - условная граница атмосферы Земли,
2 - поверхность Земли,
3 - орбита движения космического аппарата,
4 - космический аппарат,
5 - вектор первого импульса характеристической скорости ΔV1,
6 - угол между вектором первого импульса характеристической скорости ΔV1 и вектором скорости движения космического аппарата V1 на орбите ИСЗ на первом участке полета КА,
7 - вектор второго импульса характеристической скорости ΔV2,
8 - условное местоположение КА на орбите спуска после выключения его двигательной установки на втором участке полета КА,
9 - вектор скорости движения космического аппарата V1 на орбите ИСЗ в момент включения его двигательной установки на первом участке полета КА,
10 - условное местоположение КА на орбите спуска после выключения его двигательной установки на первом участке полета КА,
11 - орбита спуска КА,
12 - условное местоположение КА на орбите спуска, соответствующее его входу в атмосферу Земли, а также моменту включения двигательной установки КА на втором активном участке его полета,
13 - вектор скорости движения космического аппарата на момент его входа в атмосферу Земли Vвх,
14 - угол наклона вектора скорости движения космического аппарата на момент его входа в атмосферу Земли Vвх к местному горизонту θвх,
15 - линия местного горизонта КА на момент его входа в атмосферу Земли.
На фиг.1 показано, что в заявленном способе вектор первого импульса характеристической скорости ΔV1 направлен против вектора скорости движения V1 космического аппарата на орбите ИСЗ на первом участке полета КА. Выбором значения ΔV1 обеспечивается вход космического аппарата в атмосферу с заданной скоростью Vвх зад. В момент достижения условной границы атмосферы Земли подается второй импульс характеристической скорости ΔV2 для коррекции угла наклона вектора скорости КА к местному горизонту и достижения заданной величины θвх зад.
На фиг.2 показано, что в способе-прототипе вектор характеристической скорости ΔV1 направлен под углом α, лежащим в диапазоне 180°<α<270° к вектору скорости движения V1 космического аппарата на орбите ИСЗ в момент включения его двигательной установки на первом участке полета КА. Выбором параметров ΔV1 и α обеспечивается вход космического аппарата в атмосферу Земли с заданными значениями скорости Vвх зад и угла наклона вектора скорости КА к местному горизонту θвх зад.
Покажем возможность осуществления изобретения, т.е. возможность его промышленного применения. Особенностью ведения космической деятельности является планируемое крупномасштабное развертывание орбитальных группировок различных типов и назначений. В рамках Федеральной космической программы 2016-2025 года предусмотрены работы по созданию космических комплексов управления системами спутников научного и социально-экономического назначения, где в ряде программ (например, в программах создания спутниковых систем «Фотон», «Бион», «Ресурс») предусмотрено проведение маневров схода космических аппаратов с орбиты и спуска на поверхность Земли. При этом одной из важнейших проблем является разработка ключевых технологий управления, обеспечивающих снижение массово-энергетических затрат при организации процесса спуска космических аппаратов с орбиты. Успешное решение этой проблемы во многом обеспечивается при размещении на борту космических аппаратов систем навигации, обеспечивающих управление вектором тяги двигательной установки в зависимости от измеряемых значений параметров движения КА и использующих принципы управления, изложенные в предлагаемом изобретении. Технические средства, реализующие заявленный способ, известны из прототипа - [3], в описании которого также помещено определение величин Vвх зад - заданной скорости космического аппарата при его входе в атмосферу Земли и θвх зад - заданного угла наклона вектора скорости космического аппарата к местному горизонту при его входе в атмосферу Земли.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ЕГО СПУСКЕ С ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2014 |
|
RU2561490C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА НА АКТИВНОМ УЧАСТКЕ ЕГО ВЫВЕДЕНИЯ НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2015 |
|
RU2596004C2 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ЕГО ВЫВЕДЕНИИ НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2014 |
|
RU2573695C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ЕГО ВЫВЕДЕНИИ НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2014 |
|
RU2575556C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЫВЕДЕНИЕМ КОСМИЧЕСКОГО АППАРАТА НА ОРБИТУ ИСКУССТВЕННОГО СПУТНИКА ПЛАНЕТЫ | 2012 |
|
RU2520629C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ ПРИ ВОЗВРАТЕ К ЗЕМЛЕ С ОКОЛОЛУННОЙ ОРБИТЫ | 2023 |
|
RU2821199C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА ПРИ ПОСАДКЕ В ЗАДАННУЮ ОБЛАСТЬ ПОВЕРХНОСТИ ПЛАНЕТЫ | 2014 |
|
RU2590775C2 |
| СПОСОБ ГРУППОВОГО ОРБИТАЛЬНОГО ДВИЖЕНИЯ ИСКУССТВЕННЫХ СПУТНИКОВ | 2014 |
|
RU2569236C1 |
| СПОСОБ ЗОНДИРОВАНИЯ СЕЙСМООРБИТАЛЬНЫХ ЭФФЕКТОВ И ВАРИАЦИЙ ПЛОТНОСТИ ВЕРХНЕЙ АТМОСФЕРЫ | 2019 |
|
RU2705161C1 |
| РАКЕТНО-КОСМИЧЕСКИЙ АППАРАТ МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ | 1993 |
|
RU2046737C1 |
Изобретение относится к управлению космическим аппаратом (КА) на внеатмосферном участке его схода с орбиты искусственного спутника Земли (ИСЗ). Способ заключается в двукратном включении реактивной двигательной установки КА: на орбите ИСЗ и при входе КА в атмосферу Земли. При первом включении вектор тяги направлен против вектора орбитальной скорости, обеспечивая траекторию входа КА в атмосферу с заданной величиной скорости. Второе включение обеспечивает требуемый угол входа КА в атмосферу при соответствующей ориентации (от Земли или к Земле) вектора тяги. Техническим результатом изобретения являются уменьшение энергозатрат для перевода КА на траекторию спуска в атмосфере Земли и повышение точности входа в атмосферу и посадки КА на заданный полигон. 2 ил.
Способ управления сходом космического аппарата с орбиты искусственного спутника Земли, заключающийся в движении космического аппарата при его сходе с орбиты искусственного спутника Земли по траектории, состоящей из первого участка активного полета космического аппарата с включенной двигательной установкой, обеспечивающей подачу первого импульса характеристической скорости ΔV1, и первого участка пассивного полета космического аппарата с выключенной двигательной установкой, при этом включение двигательной установки осуществляют на орбите искусственного спутника Земли, по которой космический аппарат движется со скоростью V1, а выключение - в момент времени завершения отработки первого импульса характеристической скорости ΔV1, определении при движении космического аппарата по первому участку активного полета текущих значений его скорости Vi, высоты полета hi и угла наклона вектора скорости космического аппарата к местному горизонту θi, отличающийся тем, что формируют направление вектора первого импульса характеристической скорости ΔV1 противоположным направлению вектора скорости V1 космического аппарата на орбите искусственного спутника Земли, а траектория движения космического аппарата при его сходе с орбиты искусственного спутника Земли содержит второй участок активного полета космического аппарата с включенной двигательной установкой, обеспечивающей подачу второго импульса характеристической скорости ΔV2, и второй участок пассивного полета космического аппарата с выключенной двигательной установкой, при этом при движении космического аппарата по первому участку активного полета определяют скорость космического аппарата Твхi(ti) на момент его входа в атмосферу Земли в зависимости от текущих значений скорости Vi и высоты hi при условии выключения двигательной установки в момент времени ti в соответствии с выражением:
где ri=R+hi;
rвх=R+hвх;
Твхi(ti) - скорость космического аппарата на момент его входа в атмосферу Земли при условии выключения двигательной установки в момент времени ti;
Vi - текущее значение скорости полета космического аппарата в момент времени ti;
hi - текущее значение высоты полета космического аппарата в момент времени ti;
µ - произведение гравитационной постоянной на массу Земли;
R - средний радиус Земли;
hвх=100 км - высота входа космического аппарата в атмосферу Земли, равная высоте условной границы атмосферы Земли,
i=1, 2, 3, …,
и при выполнении условия:
Твхi(ti)=Vвх зад,
где Твхi(ti) - скорость космического аппарата на момент его входа в атмосферу Земли при условии выключения двигательной установки в момент времени ti;
Vвх зад - заданная величина скорости космического аппарата на момент его входа в атмосферу Земли,
выключают двигательную установку космического аппарата, при этом в момент выключения его двигательной установки измеряют значения высоты полета космического аппарата h∗, угла наклона его вектора скорости к местному горизонту θ∗ и скорости V∗ полета космического аппарата с последующим определением величины угла наклона его вектора скорости к местному горизонту
где r∗=R+h∗;
rвх=R+hвх;
V∗ - скорость космического аппарата в момент выключения двигательной установки;
θ∗ - угол наклона вектора скорости космического аппарата к местному горизонту в момент выключения двигательной установки;
h∗ - высота полета космического аппарата в момент выключения двигательной установки;
Vвх зад - заданная величина скорости космического аппарата при его входе в атмосферу Земли,
R - средний радиус Земли;
hвх=100 км - высота входа космического аппарата в атмосферу, равная высоте условной границы атмосферы Земли,
и осуществляют полет космического аппарата с выключенной двигательной установкой; при выполнении условий:
hi=hвх,

где hi - текущее значение высоты полета космического аппарата;
hвх = 100 км - высота входа космического аппарата в атмосферу, равная высоте условной границы атмосферы Земли,
θвх зад - заданная величина угла наклона вектора скорости космического аппарата к местному горизонту при его входе в атмосферу Земли,
включают двигательную установку, обеспечивающую подачу второго импульса характеристической скорости ΔV2 космического аппарата в плоскости его движения перпендикулярно вектору скорости движения космического аппарата, при этом при выполнении условия:
где
θвх зад - заданная величина угла наклона вектора скорости космического аппарата к местному горизонту при его входе в атмосферу Земли,
вектор второго импульса характеристической скорости ΔV2 космического аппарата ориентирован в направлении от Земли или при выполнении условия:
где
θвх зад
_ заданная величина угла наклона вектора скорости космического аппарата к местному горизонту при его входе в атмосферу Земли,
вектор второго импульса характеристической скорости ΔV2 космического аппарата ориентирован в направлении к Земле;
осуществляют движение космического аппарата с работающей двигательной установкой и измеряют текущие значения угла наклона вектора скорости космического аппарата к местному горизонту θвхj и при выполнении условия:
θвхj=θвх зад,
где θвхj - текущее значение угла наклона вектора скорости космического аппарата к местному горизонту при работающей двигательной установке в момент tj, где j = 1,2,3,…;
θвх зад - заданная величина угла наклона вектора скорости КА к местному горизонту при входе космического аппарата в атмосферу Земли,
выключают двигательную установку космического аппарата, который продолжает движение по второму участку пассивного полета космического аппарата с выключенной двигательной установкой.
| Н.М | |||
| ИВАНОВ, А.И | |||
| МАРТЫНОВ | |||
| Управление движением космических аппаратов в атмосфере Марса | |||
| М | |||
| "Наука" | |||
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Транспортир | 1922 |
|
SU393A1 |
| СПОСОБ УПРАВЛЕНИЯ СПУСКОМ КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТ | 2012 |
|
RU2493059C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ СПУСКА КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 1994 |
|
RU2083448C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ ЕГО СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ (ВАРИАНТЫ) | 2001 |
|
RU2213682C2 |
| US 3276722 A, 04.10.1966; | |||
| US 6398166 B1, 04.06.2002 | |||
| US 20060226295 A1, 12.10.2006 | |||

