Изобретение относится к устройствам дозирования, доставки проб различных сыпучих материалов для химического и физического анализа горнообогатительных, металлургических, химических и др. производств.
Известно устройство автоматического приема и отправки пневмопочтой контейнера с пробой [1].
Недостатком устройства [1] является то, что открытие контейнера и засыпание в него пробы материала осуществляется непосредственно роботом-манипулятором, при этом автоматическое дозирование заданного объема пробы в контейнер отсутствует.
Известна система аналитического контроля промышленных продуктов [2], включающая подсистему автоматического затаривания с узлом приема порожних контейнеров, узлом укупорки и узлом загрузки контейнера пробой. Недостатком приведенной системы [2] является то, что в ней отсутствует автоматическое дозирование заданного объема пробы в контейнер, а также что она описывает только последовательность необходимых операций от отбора пробы до ее доставки пневмопочтой на анализ и не решает конструктивно реализацию этих операций.
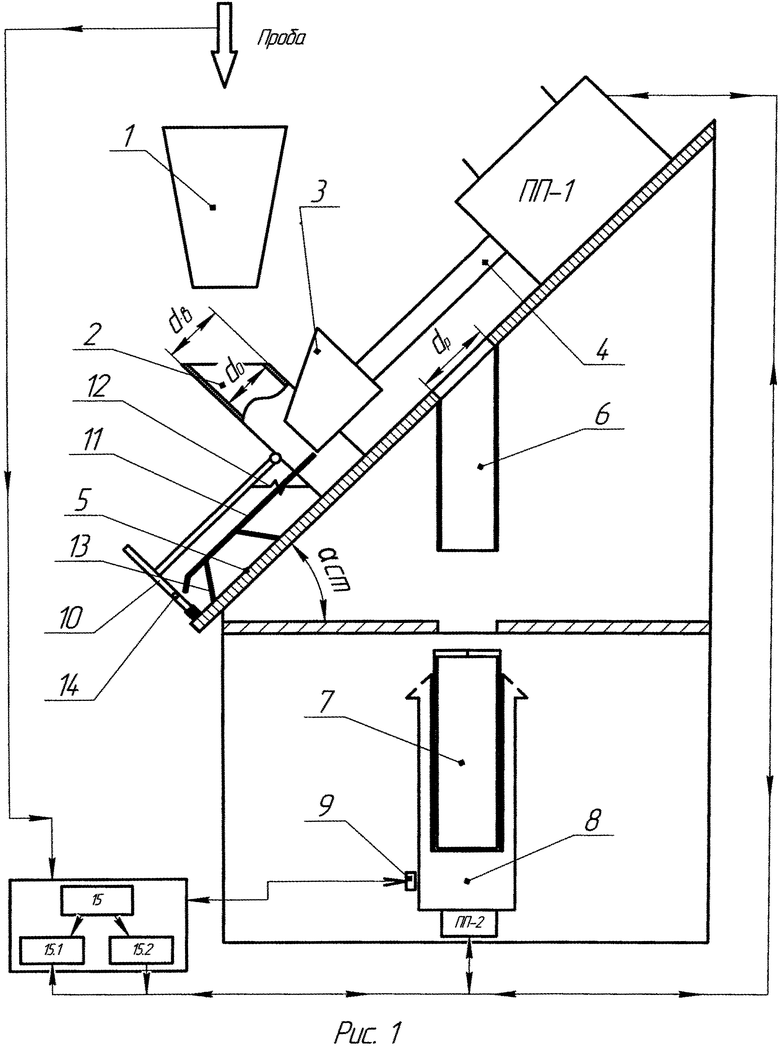
Предлагаемое устройство представлено на рис. 1 (схематично) и рис. 2, где обозначены:
1 - дозирующий бункер (загрузочная воронка)
2 - мерный цилиндр
3 - перегородка защитная
4 - шток привода ПП-1
5 - наклонный стол с отверстием
6 - загрузочная труба
7 - контейнер пневмопочты
8 - обойма контейнера
9 - датчик положения
10 - нож очистки стола
11 - направляющая движения ножа очистки стола
12 - пружина
13 - рычаг шарнирный
14 - ролик опорный
15 - управляющий контроллер
15.1 - программный блок приема и обработки информации
15.2 - программный блок реализации алгоритма операций устройства
ПП-1 - привод (пневматический)
ПП-2 - привод перемещения обоймы с контейнером пневмопочты
Рабочая зона устройства представляет собой наклонный плоский стол с разгрузочным отверстием (5), жестко закрепленным на столе механизмом возвратно-поступательного перемещения (ПП-1), шток которого (4) соединен с мерным цилиндром (2) без дна и перегородкой, прижимаемым пружиной (12) к плоскости стола.
Предлагаемое устройство работает циклически и управляется контроллером (15), оснащенным программным блоком приема и обработки информации (15.1) и программным блоком реализации алгоритма операций устройства (15.2).
Проба сыпучего продукта из автоматического пробоотборника высыпается через дозирующий бункер (1) в мерный цилиндр (2). Дном мерного цилиндра является поверхность наклонного стола (5), к которому нижний срез мерного цилиндра плотно прижимается пружиной (12). Мерный цилиндр с защитной перегородкой жестко закреплен на штоке привода (например, пневматического), обеспечивающего линейное возвратно-поступательное их перемещение по поверхности наклонного стола. Информация о местоположении мерного цилиндра с помощью датчика положения (9) передается в программный блок приема и обработки информации (15.1) контроллера (15).
Когда мерный цилиндр находится в нижнем положении, в него засыпается проба из дозирующего бункера. При этом излишки пробы, свыше объема мерного цилиндра, попадают на наклонный стол и ссыпаются в рабочий поток материала за счет выбора угла наклона плоскости стола из условия:
αст≥αмат,
где αст - угол наклона стола;
αмат - угол естественного откоса материала пробы.
Испытания устройства автоматического дозирования и затаривания пробы сыпучих продуктов проводились на сыпучем продукте, имеющем угол естественного откоса 30 градусов. Поэтому для обеспечения гарантированного ссыпания излишков материала с поверхности рабочего стола, угол наклона плоскости стола был выбран равным 35 градусам.
Далее привод ПП-1 перемещает мерный цилиндр (2) вверх до установления его над разгрузочным отверстием стола с разгрузочной трубой пробы в открытый транспортный контейнер пневмопочты и заполняет его пробой в объеме мерного цилиндра. После этого контейнер автоматически закрывается и готов к отправке.
Полная выгрузка объема пробы из мерного цилиндра обеспечивается за счет соблюдения условия:
dB>dp>d0,
где dp - диаметр разгрузочного отверстия в столе;
d0 и dB - внутренний и внешний диаметры нижнего среза мерного цилиндра, соприкасающегося с поверхностью стола.
Испытания устройства проводились на мерном цилиндре с внешним диаметром 80 мм и внутренним диаметром 72 мм. Исходя из этих размеров мерного цилиндра диаметр разгрузочного отверстия должен быть хотя бы на 2 мм меньше наружного диаметра мерного цилиндра, чтобы не допустить его провала в разгрузочное отверстие, т.е. 78 мм. Чтобы обеспечить полное высыпание пробы материала из мерного цилиндра, разгрузочное отверстие должно иметь размер хотя бы на 1 мм больше внутреннего диаметра мерного цилиндра, т.е. 73 мм. Таким образом, допустимый диапазон размеров разгрузочного отверстия, обеспечивающий полную выгрузку пробы из мерного цилиндра, составляет от 73 до 78 мм. При выходе значений диаметра разгрузочного отверстия за допустимые пределы в большую сторону мерный стакан провалится в разгрузочное отверстие, что приведет к поломке устройства. При выходе значений диаметра разгрузочного отверстия в меньшую сторону выгрузка пробы будет происходить не полностью и соответственно не будет обеспечен отбор пробы в заданном количестве.
На рис. 1. устройство изображено в начале цикла. При поступлении пробы от автоматического пробоотборника (проба) она высыпается непосредственно через дозирующий бункер (загрузочную воронку) в мерный цилиндр, обеспечивая набор заданного объема пробы для дозирования его, в последующем, в контейнер пневмопочты. Сигналы о местоположении мерного цилиндра и необходимости его заполнении поступают в программный блок приема и передачи информации (15.1) управляющего контроллера (15).
При наступлении момента времени загрузки контейнера пневмопочты (7) пробой привод перемещения обоймы с контейнером пневмопочты (ПП-2) перемещает ее под загрузочную трубу (6), одновременно открывая автоматически входное отверстие контейнера. Исполнение этих операций контролируется датчиком положения (9), сигнал от которого также поступает на вход программного блока приема и обработки информации (15.1) контроллера (15) и подтверждает готовность контейнера к загрузке. Контроллер (15) включает привод (ПП-1), который перемещает мерный цилиндр (2) в положение над разгрузочным отверстием наклонного стола, производится выгрузка пробы из мерного цилиндра через загрузочную трубу (6) в контейнер пневмопочты (7). Конечные положения мерного цилиндра фиксируются датчиками положения привода (ПП-1), которые передают сигналы в программный блок приема и обработки информации (15.1)контроллера (15). По истечении заданного программой времени разгрузки (до 10 сек) программный блок реализации алгоритма операций устройства (15.2) подает сигнал о завершении операции загрузки контейнера и он перемещается приводом (ПП-2) в станцию отправки проб. Одновременно программный блок реализации алгоритма операций устройства (15.2) включает привод (ПП-1) на перемещение мерного цилиндра (2) в исходное положение под дозирующий бункер (1). На этом цикл заканчивается.
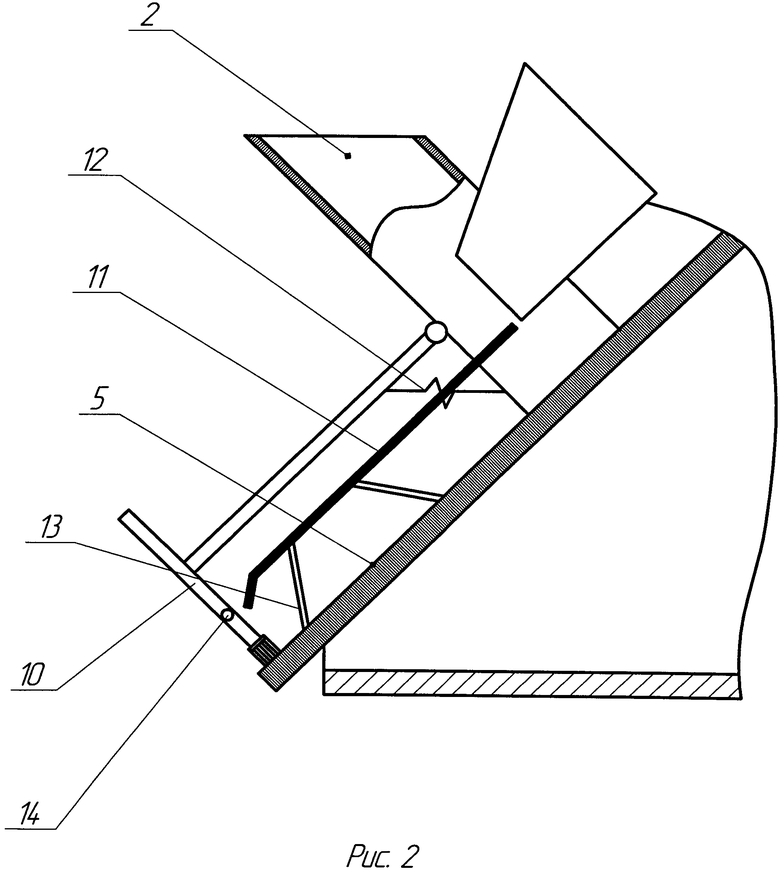
Для полной очистки наклонного стола от излишков затариваемого продукта (рис. 2) на мерном цилиндре (2) шарнирно закреплен нож (10), выполненный в виде пластины, расположенной перпендикулярно оси его перемещения, нож очищает поверхность наклонного стола при движении мерного цилиндра вниз по плоскости стола, а при движении мерного цилиндра вверх нож поднимается над столом при помощи рычага шарнирного (13) и ролика (14), движущегося по жестко закрепленной на наклонном столе направляющей (11). При достижении мерным цилиндром положения разгрузки ролик сходит с направляющей, опуская нож вновь на поверхность стола.
Предложенное устройство имеет изобретательный шаг, так как разработано новое устройство, в котором применен наклонный стол с перемещаемым по его поверхности мерным стаканом, в качестве дна которого применена поверхность наклонного стола, благодаря выбору угла наклона стола и введению очищающего ножа автоматически реализуются, управляющим контроллером, операции дозировки пробы в заданном объеме в контейнер и очистки устройства от излишков материала пробы, не допуская попадания остатков предыдущих проб в последующие, обеспечивая достоверность результатов анализа проб.
Устройство является новым, полезным, технически реализуемым и соответствует критерию изобретения.
Литература
1. Свидетельство SU 1755097 А1, G01N 1/20, опубликовано 15.02.1992.
2. Свидетельство SU 1328727 А1, G01N 1/20, опубликовано 07.08.1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТЕЙНЕР ПНЕВМОПОЧТЫ | 2013 |
|
RU2555888C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОТБОРА ПРОБ В ПОТОКЕ ЖИДКОТЕКУЧИХ ВЫСОКОАБРАЗИВНЫХ ПРОМПРОДУКТОВ | 2017 |
|
RU2665000C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОТБОРА ПРОБ ИЗ ЖЕЛОБОВ И КАНАЛОВ В ПОТОКЕ АБРАЗИВНЫХ ПУЛЬП | 2018 |
|
RU2686218C1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ФАСОВКИ ПОРОХОВ | 2019 |
|
RU2707201C1 |
| Устройство для отбора, подготовки и доставки проб | 1988 |
|
SU1601545A1 |
| УСТРОЙСТВО ДЛЯ ДОЗИРОВАНИЯ СЫПУЧЕГО МАТЕРИАЛА | 2006 |
|
RU2319112C2 |
| СПОСОБ ПРОИЗВОДСТВА ВЗРЫВЧАТЫХ ВЕЩЕСТВ | 2014 |
|
RU2560770C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЛОТНОСТИ И РАСХОДА ТВЁРДОГО В ПОТОКЕ ПУЛЬПЫ | 2020 |
|
RU2737133C1 |
| УСТРОЙСТВО И СПОСОБ ДОЗИРОВАНИЯ И ФАСОВКИ ПЛАСТИЧНЫХ ПИЩЕВЫХ ПРОДУКТОВ, В ТОМ ЧИСЛЕ СЛИВОЧНОГО МАСЛА | 2020 |
|
RU2742617C1 |
| УСТРОЙСТВО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 2013 |
|
RU2533366C1 |
Изобретение относится к устройству автоматического дозирования, доставки проб различных сыпучих материалов пневмопочтой в контейнерах для химического и физического анализа на горно-обогатительных, металлургических, химических и др. производствах. Устройство содержит дозирующий бункер пробы, загрузочную трубу в контейнер, контейнер для пробы с обоймой и пневматический исполнительный механизм управления операциями открытия, закрытия и перемещения контейнера. В устройство также введен наклонный плоский стол с разгрузочным отверстием. На столе жестко закреплен механизм возвратно-поступательного перемещения, шток которого соединен с мерным цилиндром без дна и с защитной перегородкой, прижимаемых пружиной к плоскости стола. При этом угол наклона стола выбирают из условия αст≥αмат, где αст - угол наклона стола, αмат - угол естественного откоса материала пробы. Диаметр разгрузочного отверстия (dp) принимают из условия dB>dp>d0, где dB и d0 - внутренний и внешний диаметр мерного цилиндра. Изобретение обеспечивает достоверность результатов проб. 2 з.п. ф-лы, 2 ил.
1. Устройство автоматического дозирования и затаривания пробы сыпучих продуктов в контейнер пневмопочты, содержащее дозирующий бункер пробы, загрузочную трубу в контейнер, контейнер для пробы с обоймой и пневматический исполнительный механизм управления операциями открытия, закрытия и перемещения контейнера, отличающееся тем, что в устройство введен наклонный плоский стол с разгрузочным отверстием, жестко закрепленным на столе механизмом возвратно-поступательного перемещения, шток которого соединен с мерным цилиндром без дна и с защитной перегородкой, прижимаемых пружиной к плоскости стола, причем угол наклона стола выбирают из условия:
αст≥αмат,
где αст - угол наклона стола;
αмат - угол естественного откоса материала пробы, а диаметр разгрузочного отверстия (dp) принимают из условия:
dB>dp>d0,
где dB и d0 - внутренний и внешний диаметр мерного цилиндра.
2. Устройство по п. 1, отличающееся тем, что в него введен нож очистки стола в виде пластины, расположенной перпендикулярно оси его перемещения, закрепленный шарнирно посредством рычага и прижимающей пружины к мерному цилиндру, причем на пластине установлен ролик подъема и опускания ножа на стол при перемещении ролика по направляющей, жестко закрепленной на наклонном столе.
3. Устройство по п. 1, отличающееся тем, что в него введено управляющее устройство, контроллер дозирования пробы, оснащенное программным блоком приема и обработки информации о местоположении мерного цилиндра, готовности объема пробы к выгрузке из мерного цилиндра и готовности контейнера пневмопочты к загрузке пробы, а также программным блоком, реализующим алгоритм последовательности операций дозирования пробы и ее загрузки в контейнер в каждом цикле.
| Система аналитического контроля промышленных продуктов | 1986 |
|
SU1328727A1 |
| Система автоматического аналитического контроля промышленных продуктов | 1990 |
|
SU1755097A1 |
| Устройство для дозированной подачи материала в емкость | 1981 |
|
SU1018888A1 |
| УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ ЗАГРУЖАЕМЫХ СЫПУЧИХ МАТЕРИАЛОВ | 1999 |
|
RU2224799C2 |
| Контейнер пневмотранспортной системы для перемещения груза по вертикальным трубопроводам | 1980 |
|
SU908718A1 |
| •АП*Г?4МЬТЁХН1|1КСКА|М. Кл. С 07с 45/04 С 07с 47/20 С 07с 5/18 С 07с Ы/16УДК 547.315.2.07;547. .1381(088.8) | 0 |
|
SU404221A1 |
| DE 10251065 A1, 19.05.2004 | |||

