Уровень техники
При операционном лечении, для выполнения медицинских манипуляций врачом-хирургом, необходимо придавать телу пациента различные позы и положения с возможной последующей фиксацией пациента в заданном положении. Для этого используются специальные устройства, которые, как входят в структуру медицинских столов, так и являются законченными устройствами.
Из научно-технической литературы и патентной документации известны патенты [1, 3, 4, 7] хирургических столов и приводных систем. Данные устройства обладают неподвижным основанием и опорами, удерживающими элементы поверхности для поддержки пациента, выполненные с возможностью наклона или перемещения друг относительно друга. Количество элементов поверхности варьируется в зависимости от выбранного патента с 3 до 5 штук. Управление положением элементов поверхностей осуществляется либо вручную, либо единичным приводом линейного перемещения посредством педалей.
Недостатком данных решений является малое количество элементов опорных поверхностей и их большая площадь, что не приводит к функциональной возможности придания телу пациента наилучшего положения для проведения операции. Помимо этого, позиционирование элементов осуществляется посредством механических конструкций, управляемых одним приводом, что ограничивает возможность задания взаимного расположения элементов.
Также известен патент [9] представляющий собой систему поверхностных подкладок для операционного стола. Данное изобретение относится к системе поверхностных прокладок, которая может помогать в позиционировании пациента при этом сводя к минимуму контактное давление между пациентом и опорной для пациента поверхностью системы поверхностных прокладок. Управление высотой поверхностных подкладок осуществляется при помощи специализированной системы управления, включающей в себя: теплообменник, напорный источник жидкости, источник вакуума, пульт управления, термопары и блок управления для связи всех компонентов в единую сеть. Посредством пульта управления происходит регулировка уровня жидкости в подкладках, а также регулировка температуры.
Недостатком данного решения является невозможность обеспечения жесткой поверхности, что существенно снижает функциональные возможности данного решения. Помимо этого, использование элементов гидравлики может быть неприемлемо для использования в некоторых видах хирургических операционных.
Также известны патенты [13, 14] представляющие собой хирургические столы, состоящие из основания и включающее в себя вертикальные подъемные колонны на каждом конце основания, сопряженные с узлом бокового наклона, удерживающим жесткую поверхность стола. Колонны могут осуществлять моторизованный вертикальный подъем, а узел бокового наклона, позволяет регулируемо позиционировать верхнюю часть стола во множество различных положений. В системах управления данных хирургических столов предусмотрены различные элементы для управления функциями подъема вертикальных колонн. Реализация управления происходит посредством двух ручных пультов. Помимо этого, для обеспечения стерильного поля при использовании стола на протяжении всей хирургической процедуры, предусмотрено управление посредством нажатия ногами на педали.
Недостатком описанных технических решений является наличие единой жесткой неизменяемой плоскости столешницы операционного стола, что не позволяет формировать требуемый профиль поверхности, и, следовательно, снижает функциональные возможности по приданию телу пациента заданного положения.
Помимо вышеописанных существует патент [11] представляющий собой операционный стол с координированным движением. Операционный стол, имеет две опоры, образующие раму поддержки элементов позиционирования поверхности стола. На каждой опоре установлен позиционирующий механизм, представляющий собой три привода угловых перемещений с параллельными осями вращения, механически последовательно соединенных между собой при помощи корпусных элементов. Позиционирующие механизмы сопряжены с элементами поверхности стола посредством дополнительного вращающего устройства. Посредством данных позиционирующих механизмов и вращающих устройств осуществляется позиционирование двух элементов поверхности стола, сопряженных между собой при помощи шарнира. Система управления данного операционного стола, обладает блоком управления позиционирующих механизмов и вращающихся устройств с двигателями и датчиками обратной связи по скорости и положению. Управление осуществляется посредством пульта, тач-скрин панели или программы, установленной на внешнем управляющем компьютере.
Недостатком данного устройства является малое число элементов опорной поверхности стола и ограниченность форм поверхностей, создаваемых посредством данных элементов.
Так же существуют патенты [12, 15, 16] представляющее собой конструкции хирургических столов. Данные конструкции имеют две телескопические колонны, на концах которых закреплены поворотные устройства для поворотов опорной поверхности стола. Таким образом, обеспечивается возможность вертикального линейного перемещения поверхности стола, а также ее поворот. Сами поверхности столов представляют собой жесткие конструкции имеющее возможность закрепления на них элементов опорной поверхности стола. Системы управления включают в себя управляющий контроллер, интерфейс пользователя в виде сенсорного дисплея или пульта, устройство поворота, устройство подъема колонны и тормозную систему.
Недостатком данных устройств является отсутствие возможности изменения формы поверхности стола интраоперационно. Элементы опорной поверхности устанавливаются в конструкцию заранее, и их настройка во время операции ограничена. В связи с этим снижаются функциональные возможности по приданию телу пациента заданного положения.
Так же известны патенты [2, 6, 8, 10] представляющие собой либо патенты на столы, либо устройства для изменения положения операционных столов. В данных патентах описаны устройства, имеющие основание с одной подъемной колонной на которой закреплен хирургический стол в виде набора элементов (от 3 до 7 шт. ) опорной поверхности стола. Данные элементы сопряжены с колонной посредством позиционирующего механизма, который может быть сопряжен со всеми элементами напрямую [8, 10] или сами элементы могут быть соединены между собой посредством отдельных частей механизма [2, 6]. Положение данных элементов можно выставлять друг относительно друга, либо вручную [10], либо посредством системы управления с пультом [2, 6, 8].
Недостатком описанной группы устройств является малое число элементов опорной поверхности стола и ограниченность формы поверхностей, создаваемых посредством элементов опорной поверхности стола.
Так же существует патент [5] представляющий собой опорную конструкцию для позиционирования пациента с транслятором перемещения туловища пациента. Опорная конструкция состоит из основания, секций опоры для пациента, приводов угла поворота, предназначенных для выборочного позиционирования секций опоры для пациента во множестве угловых ориентаций относительно друг друга. Данная конструкция имеет элементы опорной поверхности для поддержки пациента, которые можно регулировать вручную независимо друг от друга, что позволяет врачу выборочно располагать пациента для удобного доступа к зоне лечения и выполнения манипуляций с пациентом во время лечебных процедур, включая поворот, поперечное перемещение, переворачивание, изменение угла наклона или изгибание корпуса и/или сустава пациента, лежащего в общем случае на спине, на животе или на боку. В системе управления данной конструкции предусмотрены датчики для измерения всех вертикальных, горизонтальных или поперечных перемещений, углового смещения, перемещений поворота и качения и продольного перемещения опорной системы для пациента. Эти датчики передают данные в компьютер для скоординированной регулировки и поддержания внутренних концов опор для пациента в соответствующем положении во время всех перемещений.
Недостатком данного устройства является необходимость регулировки элементов опорной поверхности вручную, что приводит к существенным ограничениям в случае интраоперационного изменения положения пациента.
В качестве ближайшего аналога (прототипа) выбран патент [17], раскрытый в опубликованной заявке US 20170135890 А1 от 18.05.2017 (Д1). Этот патент описывает систему для формирования положения пациента во время хирургической операции, включающая модуль с секциями изопорных подкладок и модуль каркас для поддержки пациента. Модуль каркас для поддержки пациента включает в себя опорную раму, продольную раму, соединенную с опорной рамой, и опорную площадку, опирающуюся на продольную раму. Продольная рама проходит в продольном направлении, а опорная площадка регулируется от плоской конфигурации до вогнутой конфигурации или выпуклой конфигурации. Модуль с секциями имеет опорную площадку, которая может содержать одну или несколько опорных подушек или, альтернативно, множество регулируемых опорных подушек. Как таковые, одна или более опорных подушек являются подвижными, или множество опорных подушек являются регулируемыми, так что, когда пациент поддерживается модулем каркас для поддержки пациента, тело пациента можно перемещать, регулировать или изменять положение. Кроме того, когда опорная платформа содержит множество камер, камеры можно отрегулировать для уменьшения давления, оказываемого на тело пациента во время длительных хирургических процедур и т.п.Такое перемещение, регулировка, изменение положения и снижение давления могут быть выполнены таким образом, что персоналу не требуется нарушать стерильное поле, окружающее пациента, для репозиционирования пациента, тем самым избегая потенциальных проблем с неправильным обращением и инфицированием. Система управления устройства осуществляет управление группой актуаторов линейных подвижностей опорных подушек и группой телескопических колонн с различными пультами управления для каждой группы. Актуаторы имеют функцию измерения силы давления тела пациента на хирургический стол посредством сенсорных элементов. Данная информация преобразуется и выводится при помощи программного компьютерного интерфейса в виде карты давления тела пациента на раму.
Данное решение выполнено с возможностью использования в качестве хирургического стола для расположения пациента и позволяет создавать сложный профиль опорной поверхности столешницы операционного стола, однако изменение профиля в рамках одной секции с опорной подушкой производятся путем замены опорной подушки на другую с отличным геометрическим профилем. Такой подход позволяет выставлять требуемую поверхность до или после, но не интраоперационно.
Недостатком всех вышеописанных решений является ограниченные функциональные возможности, связанные с малым количеством управляемых автоматически перемещающихся секций опорной поверхности столешницы операционного стола и ограниченные возможности по интраоперационному изменению этой опорной поверхности. Данные ограничения не позволяют формировать опорную поверхность, позволяющую интраоперационно изменять положение пациента индивидуально.
Раскрытие сущности изобретения
Изобретение представляет собой верхнюю часть хирургической столешницы, предназначенную для формирования интраоперационного положения пациента за счет изменения положения составных частей опорной поверхности.
Идея реализуется при помощи мехатронной системы. Концепция построения данной системы заключается в верхней части столешницы для проведения хирургических операций с возможностью позиционирования пациента во время проведения операции в автоматическом режиме не только в макромасштабе, но и в микромасштабе. Под перемещением пациента в макромасштабе подразумевается перемещение отдельных частей тела пациента, таких как: нижняя часть ноги, верхняя часть ноги, нижняя часть тела, верхняя часть тела, кисти, руки, голова. В современных операционных столах реализовано именно перемещение пациента в макромасштабе. Следует заметить, что во время хирургической операции зачастую требуется перемещение или переориентация пациента. Под микромасштабом понимается пространство в несколько раз меньше чем самая маленькая часть пациента. Такой частью тела является кисть пациента. Следовательно, концепция мехатронной системы формирования индивидуального интраоперационного положения пациента заключается в разработке хирургического стола с возможностью управляемого перемещения опорных поверхностями малого размера.
Формирование общей опорной поверхности, на которой располагается пациент, происходит последовательно и формируется из отдельных опорных поверхностей малого размера. Столешница мехатронной системы формирования индивидуального интраоперационного положения пациента представляет собой набор из семи блоков рентгенопрозрачных пластин. Каждый блок представляет собой комплект отдельных ренгенопрозрачных пластин. Каждая отдельная пластина может перемещаться только в одном направлении - вертикально вверх/вниз. Крепление отдельных ренгенопрозрачных пластин (входящих в блок рентгенопрозрачных пластин) осуществляется при помощи модуля прижатия. Так как необходимо обеспечить рентгенопрозрачность всей столешницы мехатронной системы формирования индивидуального интраоперационного положения пациента, крепление блока рентгенопрозрачных пластин происходит в перпендикулярном направлении относительно столешницы. Крепление блока рентгенопрозрачных пластин происходит путем создания прижимающего воздействия на продольные стенки отдельных ренгенопрозрачных пластин, что приводит к созданию силы трения и фиксации всех ренгенопрозрачных пластин.
Семь модулей прижатия, в состав которых входят семь блоков рентгенопрозрачных пластин, формирующих столешницу мехатронной системы формирования индивидуального интраоперационного положения пациента, закреплены в модуле каркас. Установка каждого модуля прижатия осуществляется совместно с устройством измерения веса модуля прижатия. Это устройство производит определение веса, действующего на модуль прижатия, а именно на блок рентгенопрозрачных пластин. Следует отметить, что модуль прижатия крепится к модулю каркас только с одной стороны, что обеспечивает компенсацию изменения общей длины модуля прижатия, вызванной удлинением крепежных балок в конструкции.
Формирование опорной поверхности - столешницы мехатронной системы формирования индивидуального интраоперационного положения пациента, как было сказано ранее, происходит при помощи перемещения отдельных рентгенопрозрачных пластин в вертикальном направлении. Перемещение отдельных рентгенопрозрачных пластин происходит при помощи многосекционного модуля, установленного в модуле каркас, и имеет возможность перемещения вдоль продольной стороны модуля каркас, занимая одно из семи определенных положений, соответствующих положению модулей прижатия. Каждая отдельная рентгенопрозрачная пластина соответствует отдельному линейному мехатронному элемента, установленному в многосекционном модуле.
Формирование опорной поверхности происходит по следующему алгоритму: многосекционный модуль занимает положение, соответствующее первому модулю прижатия. Происходит запуск всех линейных мехатронных элементов, входящие в состав многосекционного модуля, до касания упругим элементов нижней грани рентгенопрозрачной пластины. Затем происходит снятие давления с рентгенопрозрачных пластин, входящих в состав первого модуля прижатия. Следовательно, после снятия давления с пластин, они получают свободу перемещения в вертикальном направлении. Затем происходит линейные перемещения отдельных пластин, вызванное работой линейных мехатронных элементов, на определенную величину. После формирования опорной поверхности, образуемая первым блоком рентгенопрозрачных пластин, происходит зажатие этих пластин при помощи модуля прижатия. Далее происходит опускание всех линейных мехатронных элементов в начальную, нулевую точку положения. Следом происходит перемещение многосекциооного модуля во второе положение, соответствующее положению второго модуля прижатия. Дальнейшие действия повторяют действия описанные для первого положения многосекционного модуля. Последовательно занимая определенные положения, многосекционный модуль формирует опорную поверхность мехатронной системы формирования индивидуального интраоперационного положения пациента.
Мехатронная система формирования индивидуального интраоперационного положения пациента является законченным изобретением и описывается в данном патенте.
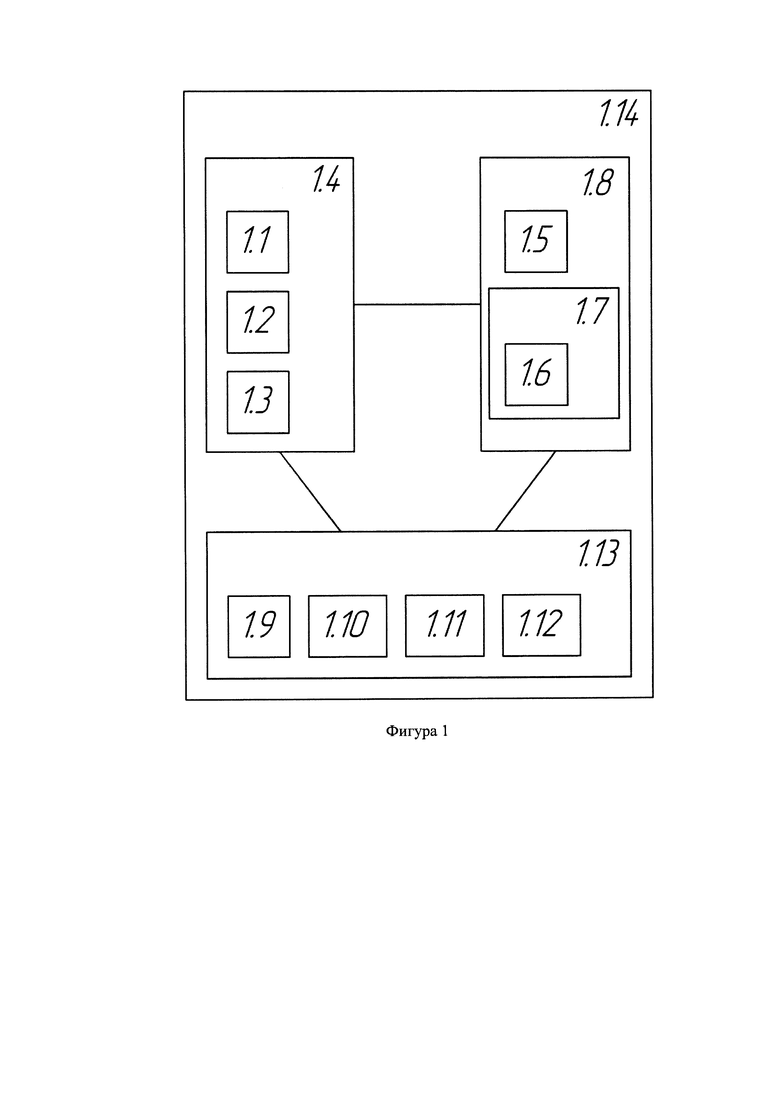
Структура механической части мехатронной системы формирования индивидуального интраоперационного положения пациента представлена на фигуре 1. Условно мехатронную систему формирования индивидуального интраоперационного положения пациента 1.14 можно разделить на три основных компонента: модуль каркас 1.4; многосекционный модуль 1.8 и модуль прижатия 1.13, которые в свою очередь включают в себя различные подсистемы, мехатронные элементы, узлы и различные мехатронные модули.
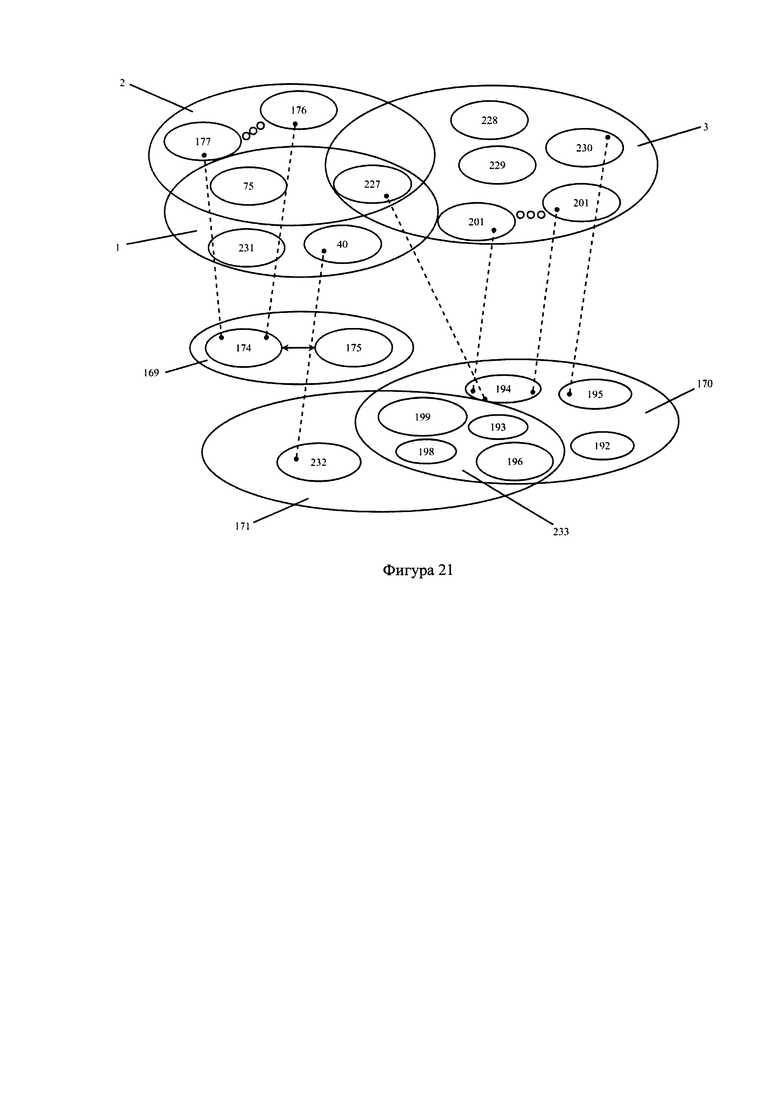
Модуль каркас 1.4 включает в себя устройство измерения веса модуля прижатия 1.2, узел перемещения многосекционного модуля 1.1. Основными компонентами многосекционного модуля являются: рама 1.5, линейный мехатронный элемент 1.6 и мехатронное устройство линейного перемещения 1.7. В состав модуля прижатия входят следующие компоненты: узел перемещения клинового соединения 1.10, клиновое соединение 1.9, блок рентгенопрозрачных пластин 1.12, прижим, с возможностью измерения силы прижатия 1.11. Мехатронная система формирования индивидуального интраоперационного положения пациента крепится на опорные колонны 1.3, с установленными на них рамами сопряжения опорных колон с модулем каркас 1.4. Взаимосвязь конструктивных и электрических элементов мехатронных модулей системы формирования индивидуального интраоперационного положения пациента показана на фигуре 21.
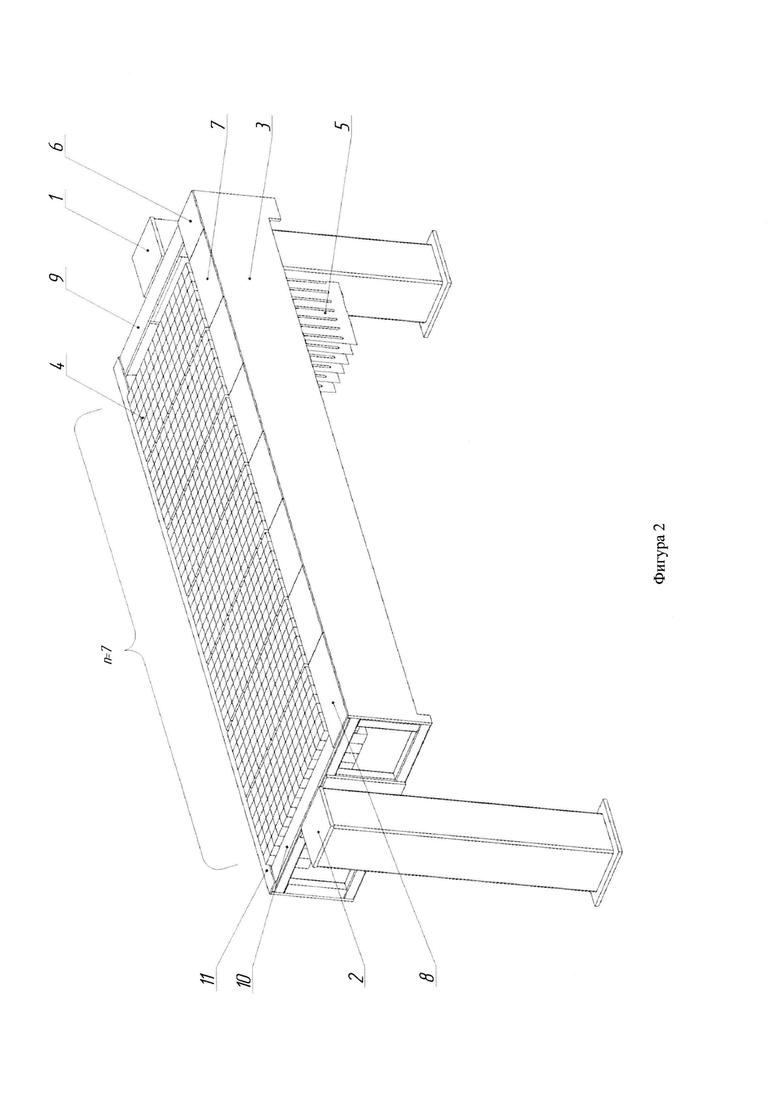
На фигуре 2 представлен внешний вид мехатронной системы формирования индивидуального интраоперационного положения пациента. На опорных колоннах 1 и 2 установлен модуль каркас 3. Внутри которого располагаются семь модуль прижатия 4. При помощи линейных направляющих модуль каркас 3 связан с многосекционный модуль 5. Сверху модуля каркас 3 устанавливаются пластины 6, 7 (шесть штук) и 8 для формирования опорной поверхности для жесткой установки дополнительного оборудования, закрепленной при помощи сборного кронштейна 25. По кроям модуля каркас 3 установлены дополнительные пластины 9, 10 и 11 для обеспечения герметичности все внутренних встраиваемых частей мехатронной системы формирования индивидуального интраоперационного положения пациента. Пластина 11 закреплена к стенке 13 при помощи уголков 29
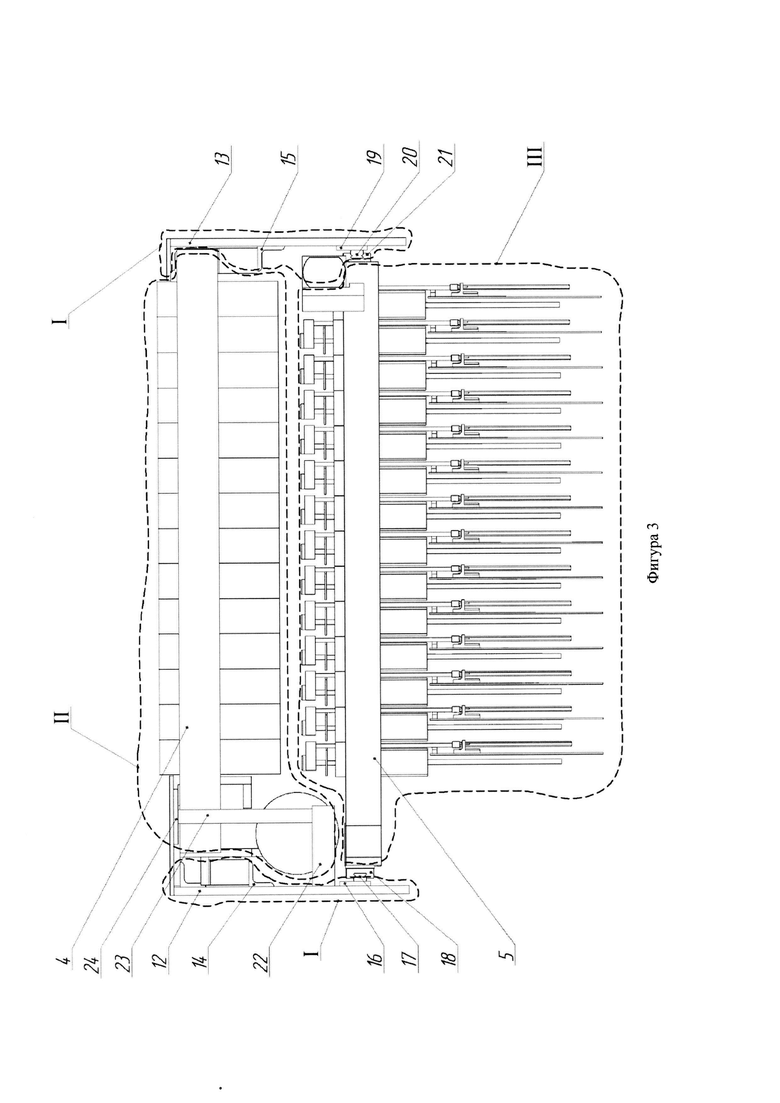
На фигуре 3 представлен внешний вид (разрез) мехатронной системы формирования индивидуального интраоперационного положения пациента. Позицией I обозначен модуль каркас. Позицией II обозначен модуль прижатия с установленным внутрь блоком рентгенопрозрачных пластин. Позицией III обозначен многосекционный модуль.
Основными элементами модуля каркас являются стенки 12 и 13, являющимися не только опорными элементами для встраиваемых компонентов мехатронной системы формирования индивидуального интраоперационного положения пациента (модуль прижатия, многосекционный модуль), но и являющимися опорными элементами для информационно-измерительной системы, входящей в состав устройства измерения веса модуля прижатия. Крепление устройства измерения веса модуля прижатия 40 осуществляется при помощи уголков 14 и 15, установленных на стенках 12 и 13 соответственно. На устройство измерения веса модуля прижатия 40 устанавливается модуль прижатия с установленным внутрь блоком рентгенопрозрачных пластин. Крепление и перемещение многосекционного модуля 5 осуществляется при помощи профильных линейных рельс 17 и 20, закрепленных на стенках 12 и 13 соответственно. В свою очередь линейные шариковые каретки 18 и 21 установлены на поперечных гранях рамы многосекционного модуля 73. Крепление профильных рельс 17 и 20 с модулем каркас 3 происходим при помощи технологических пластин 16 и 19 соответственно, выполняющие роль свободного размера в размерной цепи.
Сборный кронштейн 25, являющимся крепежным элементом опорной поверхности для жесткой установки дополнительного оборудования, собирается из пластины 22, закрепленной на внутренней поверхности стенки 12. Перпендикулярно к пластине 22 прикреплена стойка 23, а с другой стороны к стойке прикручивается пластина 24, которая является опорной поверхностью для пластин 6, 7 (шесть штук) и 8, которые в свою очередь образуют опорную поверхность для жесткой установки дополнительного оборудования.
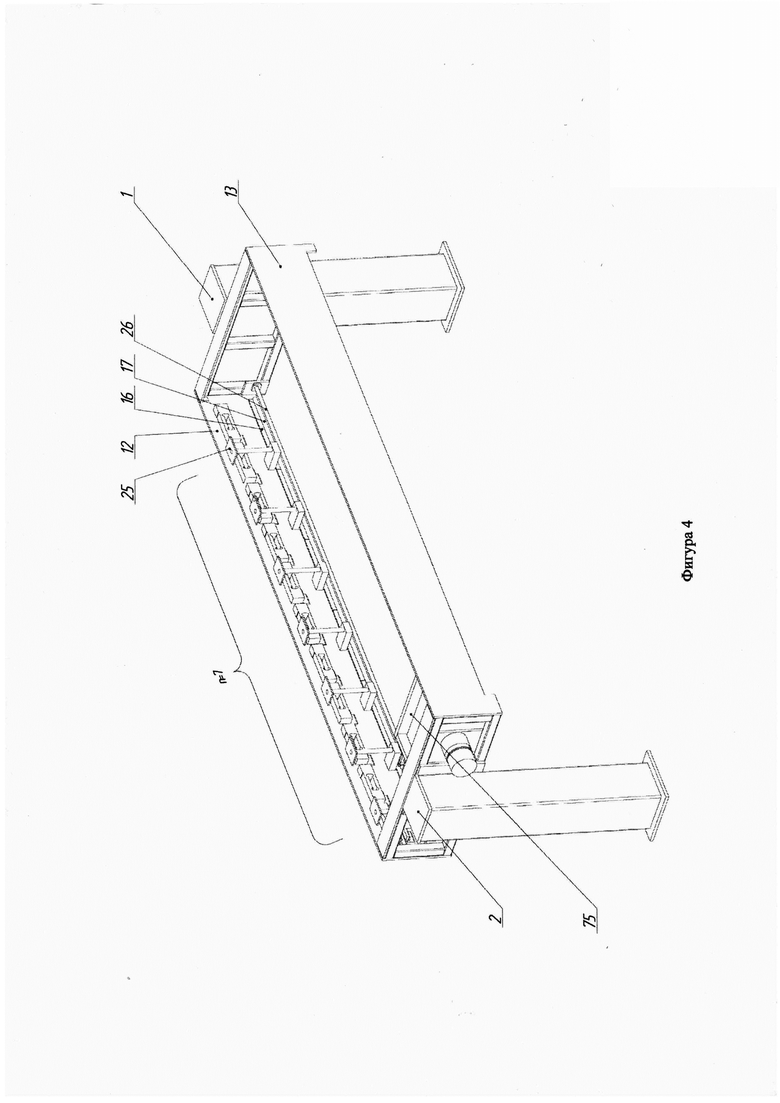
На фигуре 4 представлен внешний вид модуля каркас (вид 1). На данном рисунке показано взаимное расположение основных элементов необходимых для крепления и перемещения рамы многосекционного модуля 73, а именно профильной линейной рельсы 17, закрепленной при помощи пластины 16 к стенке 12 и шарико-винтовая передача 26. Показано взаиморасположение сборных кронштейнов 25 внутри модуля каркас и их количество (семь штук).
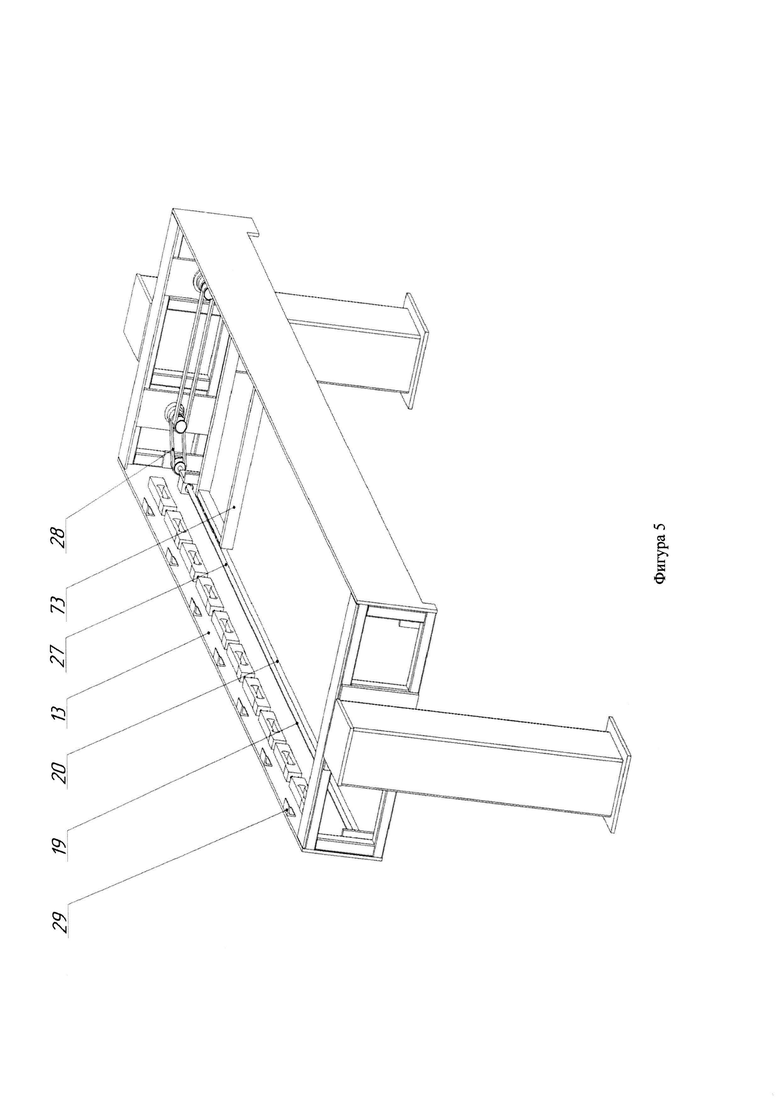
На фигуре 5 представлен внешний вид модуля каркас (вид 2). На данном рисунке показано взаимное расположение основных элементов необходимых для крепления и перемещения рамы многосекционного модуля 73, а именно профильной линейной рельсы 20, закрепленной при помощи пластины 19 к стенке 13 и шарико-винтовая передача 27.
Показано взаиморасположение уголков 29 внутри модуля каркас и их количество (семь штук), необходимых для крепления пластины 11.
Перемещение рамы многосекционного модуля 73 осуществляется по двух линейным рельсам 17 и 20, при помощи двух шарико-винтовых передач 26 и 27. Передачу крутящего момента от привода к шарико-винтовым передачам осуществляется при помощи системы ременных передач 28, установленной на раме 30 модуля каркас.
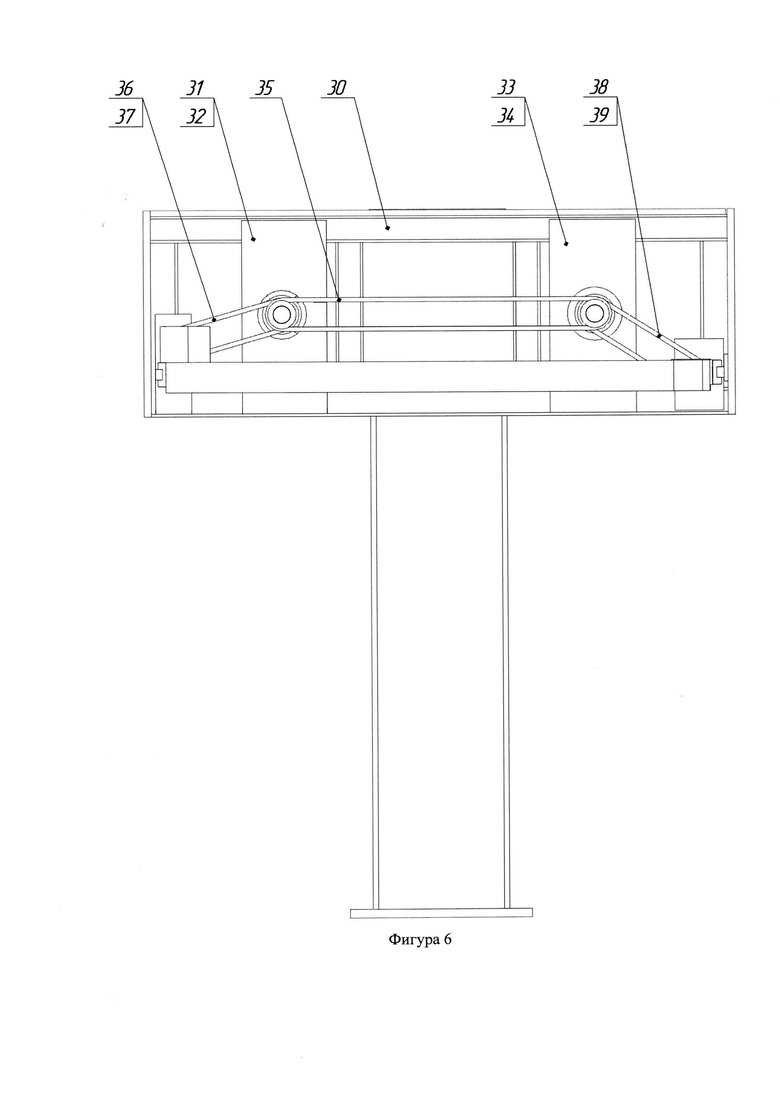
На фигуре 6 представлен внешний вид системы ременных передач. На раме 30 модуля каркас установлена пластина 31, на которой закреплен привод 32 вращательного движения двух шарико-винтовых передач 26 и 27. Так же на раме 30 установлена пластина 33, на которой закреплен модуль вращения 34, необходимый для передачи вращательного движения с одной стороны модуля каркас на другую. На осях привода и модуля вращения закреплены шкивы и осуществляют передачу вращательного движения при помощи зубчатых ремней 35, 36 и 38, которые в свою очередь входят в зацепления со шкивами 37 и 39, установленных на шарико-винтовых передачах 27 и 26 соответственно.
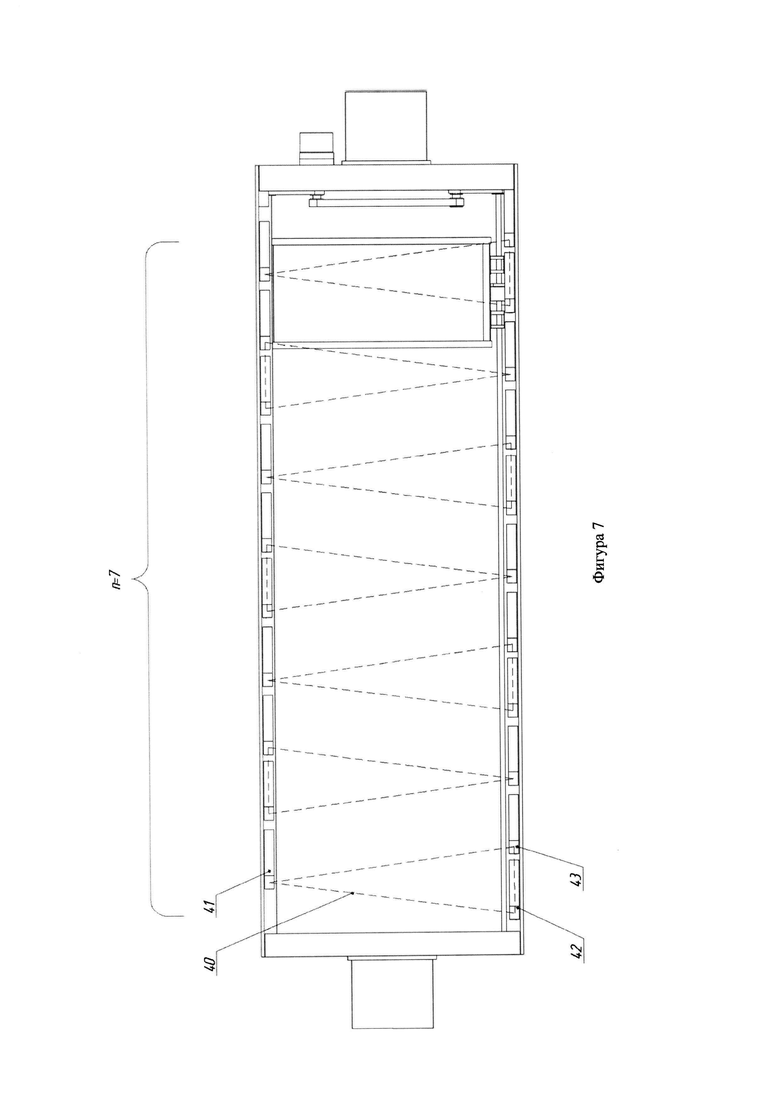
На фигуре 7 представлено устройство измерения веса модуля прижатия 40. Основным элементом устройства измерения веса модуля прижатия является тензометрический датчик. Компоновка из трех тензометрических датчиков 41, 42 и 43, установленные по треугольной схеме, образуют устройство измерения веса модуля прижатия 40. Тензометрические датчики устанавливаются на уголки 14 и 15, которые закреплены на стенках 12 и 13 модуля каркас соответственно. В общей сложности в модуле каркас установлены семь устройство измерения веса модуля прижатия 40.
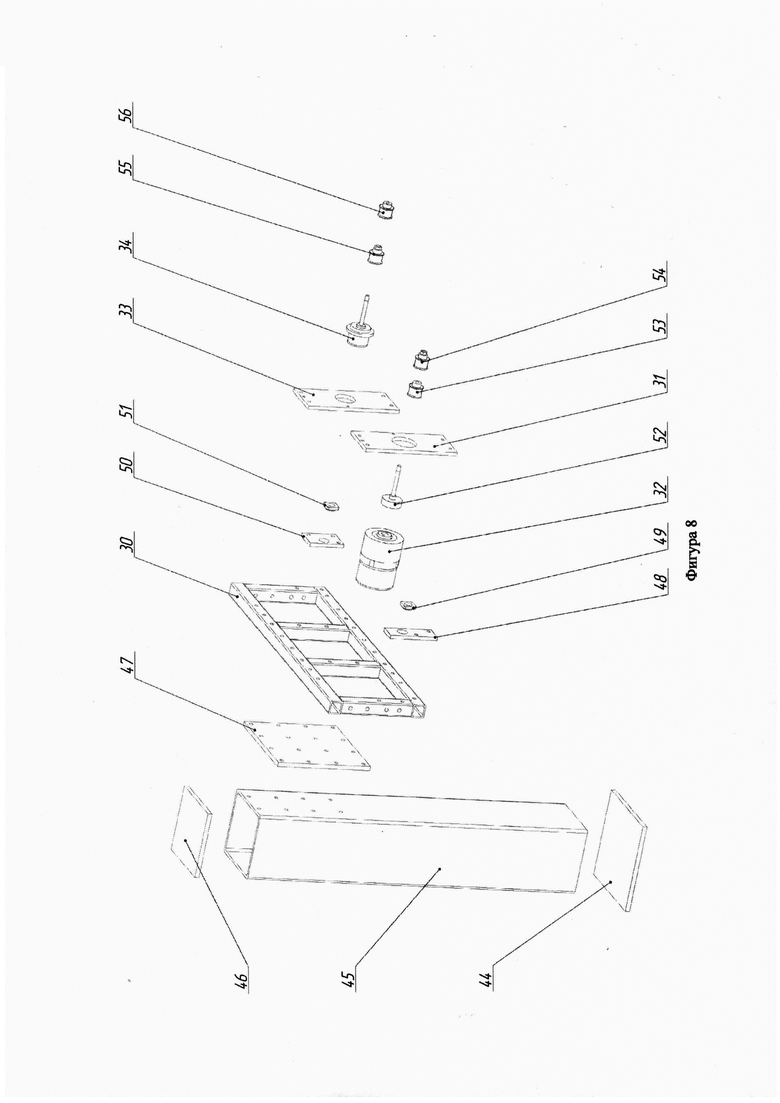
На фигуре 8 представлен внешний вид опорной колонны 1. Основание 44 приваривается к профильной трубе 45 с одной стороны, а с другой стороны закрывается пластиной 46, выполняющая роль герметизации. К профильной трубе 45 присоединяется пластина 47, являющейся связующим элементом между колонной 1 и поперечной рамой 30 модуля каркас, соединенных при помощи болтового соединения. На поперечной раме 30 установлены пластины 48 и 50, являющиеся опорными элементами для опор винтов шарико-винтовых передач 27 и 26 соответственно. Опоры винтов шарико-винтовых передач 49 и 51 установлены в пластины 48 и 50 соответственно.
Для передачи вращательного движения на винты шари-винтовых передач используется система ременных передач. Крепление привода вращения 32 к поперечной раме 30 осуществляется при помощи пластины 31. На валу привода вращения 32 установлен переходной фланец 52, обеспечивающий соединение валов привода вращения и шкивов 53 и 54. Шкив 53 передает вращательное движение при помощи зубчатого ремня 36 на винт шарико-винтовой передачи 27, на которой установлен шкив 37. Для передачи вращательного движения на противоположную сторону поперечной рамы 30 модуля каркас используется дополнительный модуль вращения 34, которой закреплен на поперечной раме 30 при помощи пластины 33. На оси модуля вращения 34 расположены два шкива 55 и 56. Шкив 54, расположенный на оси привода вращения 32 передает вращательное движение на шкив 56, расположенный на оси модуля вращения 34. Шкив 55 при помощи зубчатого ремня 38 передает вращательное движение на винт шарико-винтовой передачи 26, на которой закреплен шкив 39.
На фигуре 9 представлен модуль вращения 34. В корпусе 57 установлены шариковые подшипники 58 и 59. Между подшипниками расположена втулка 60. В подшипниковом узле расположен вал 61. При помощи кольца 62 и гайки 63 обеспечивается фиксация подшипников 58 и 59 на оси вала 61. Фиксация подшипников 58 и 59 относительно корпуса обеспечивается при помощи крышки 64, которая соединяется с корпусом 57 при помощи винтов.
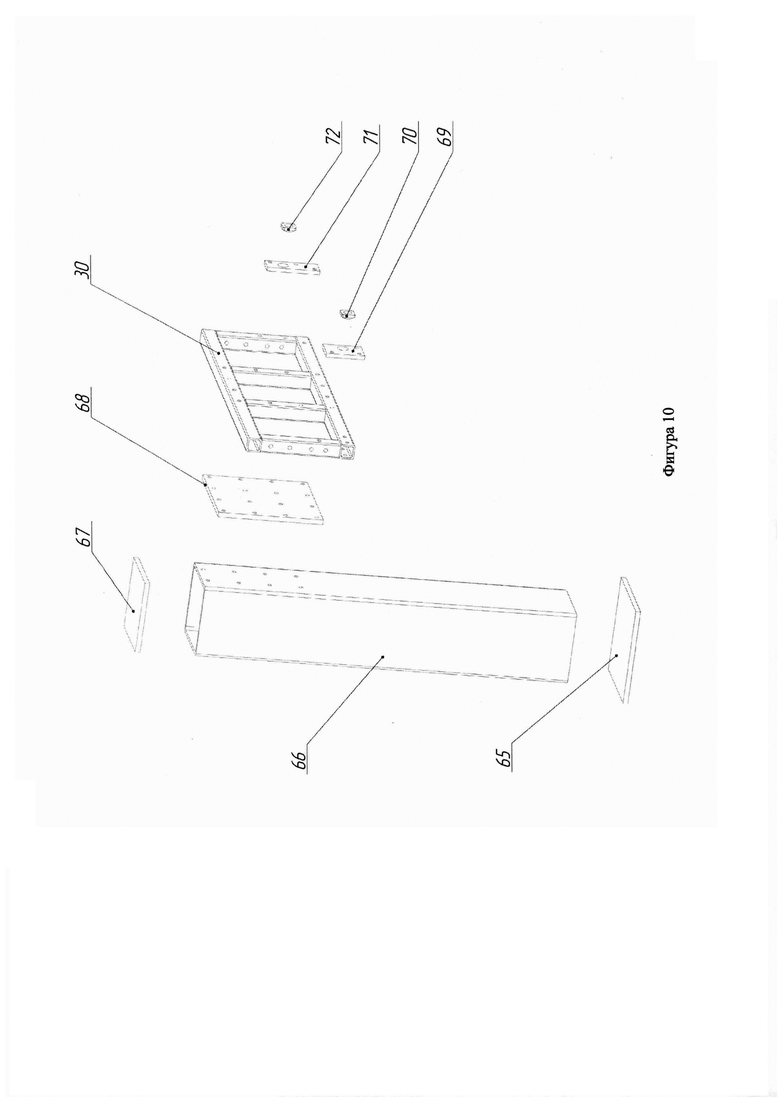
На фигуре 10 представлен внешний вид опорной колонны 2. Основание 65 приваривается к профильной трубе 66 с одной стороны, а с другой стороны закрывается пластиной 67, выполняющая роль герметизации. К профильной трубе 66 присоединяется пластина 68, являющейся связующим элементом между колонной 2 и поперечной рамой 30 модуля каркас, соединенных при помощи болтового соединения. На поперечной раме 30 установлены пластины 69 и 71, являющиеся опорными элементами для опор винтов шарико-винтовых передач 27 и 26 соответственно. Опоры винтов шарико-винтовых передач 70 и 72 установлены в пластины 69 и 71 соответственно.
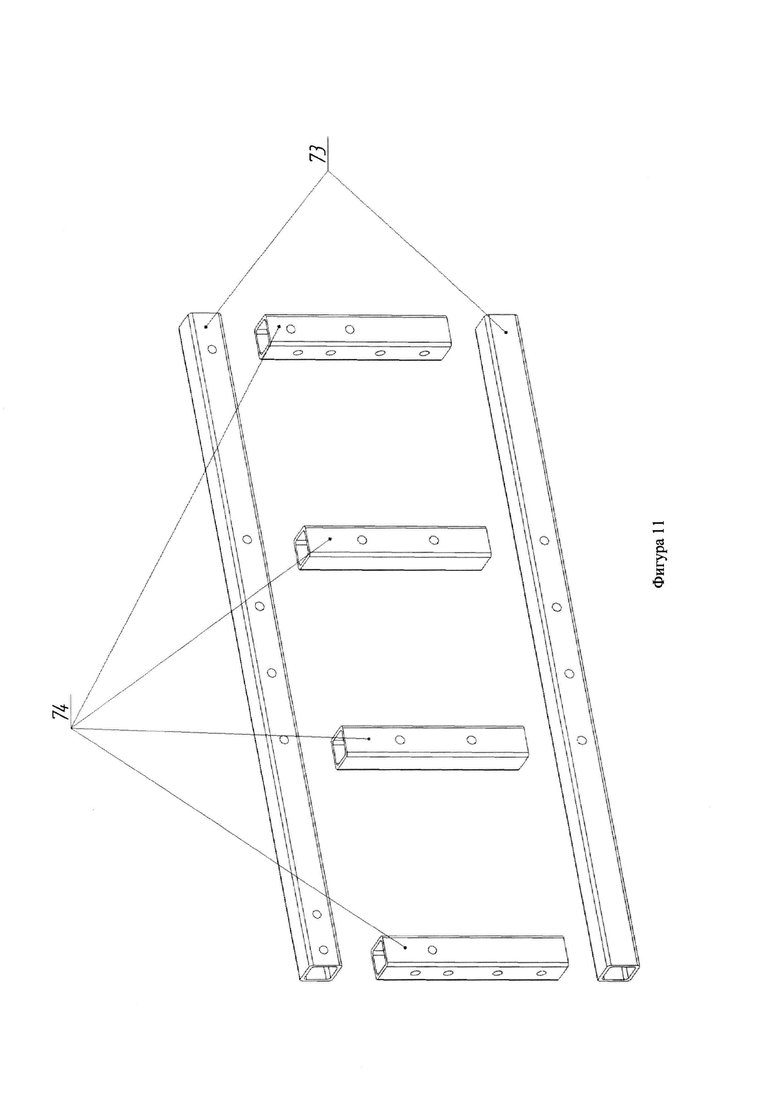
На фигуре 11 представлен внешний вид поперечной рамы 30 модуля каркас. Поперечной рамы 30 является сварной конструкцией, состоящей из двух профильных труб 73 и четырех профильных труб 74.
Модуль каркас является связующим мехатронным модулем, осуществляющий перемещение многосекционного модуля между модулями прижатия. Перемещение многосекционного модуля осуществляет узлом перемещения многосекционного модуля, являющимся устройством, позволяющим линейно перемещать раму многосекционного модуля по линейным направляющим, установленных на стенках модуля каркас, и приводящейся в движение при помощи двух шарико-винтовых передач.
В конструкцию модуля каркас конструктивно встраивается устройство измерения веса модуля прижатия. Это устройство представляет собой информационно-объединенные трех вертикально направленных датчиков измерения усилия, позволяющих измерять вес, установленных на них объектов. Такой устройство не только позволяет определять и измерять распределения и силу, с которой пациент воздействует на отдельные части столешницы операционного стола, но также позволяет контролировать и измерить внешнюю силу, действующую на пациента во время проведения хирургических операций, например, таких как, сила, возникающая во время вкручивание транспедикулярных винтов.
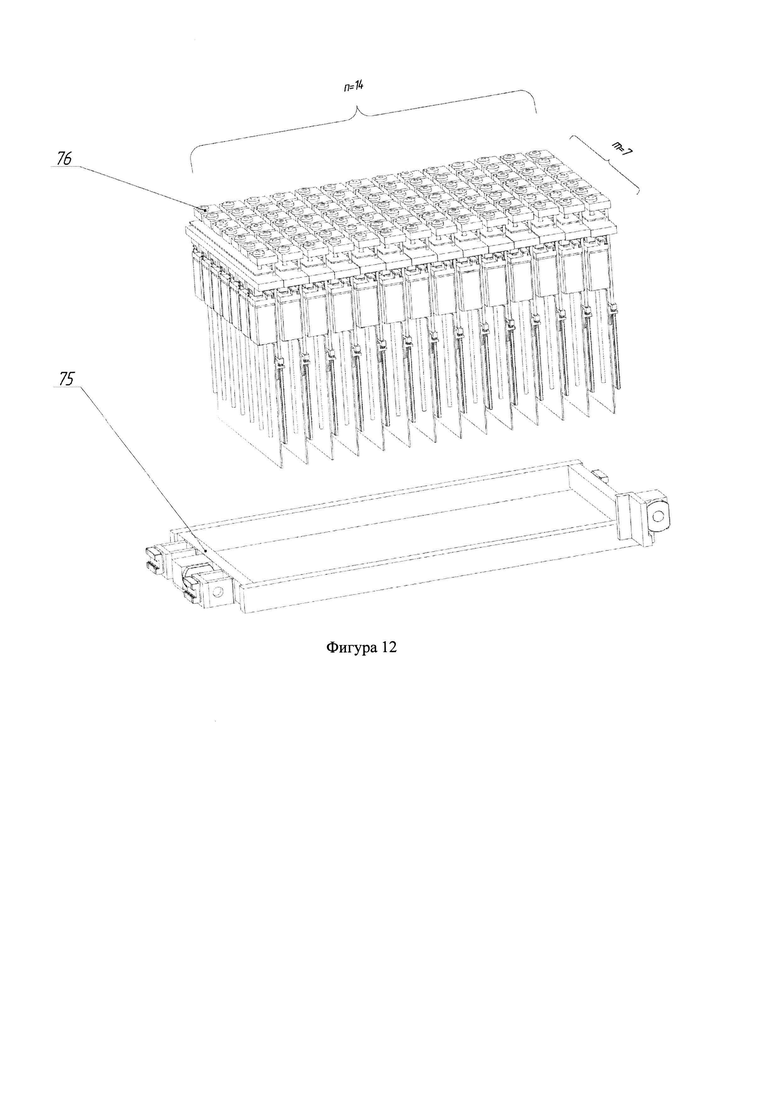
На фигуре 12 представлен внешний вид многосекционного модуля 5. Многосекционный модуль условно можно разделить на два основных элемента: рама многосекционного модуля 75 и линейный мехатронный элемлент 76. Линейные мехатронные элементы собираются блоками по семь штук, образуя мехатронное устройство линейного перемещения. Затем мехатронные устройства линейного перемещения устанавливаются на раму многосекционного модуля 75 и фиксируются винтами. Общее количество линейных мехатронных элементов составляет 98 штук, образуя матрицу поверхности, где длинна n = 14 штук, а ширина m = 7 штук.
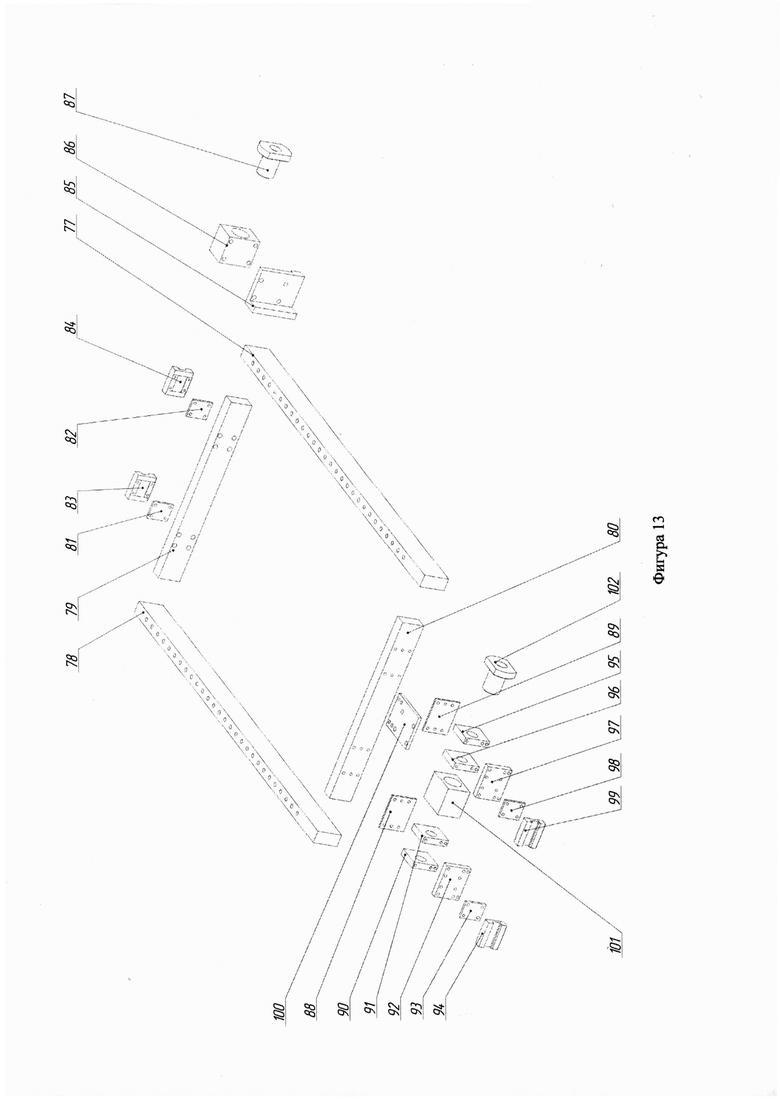
На фигуре 13 представлен внешний вид рамы многосекционного модуля. Базовыми элементами рамы многосекционного модуля являются балки 77 и 78 соединенные с пластинами 79 и 80 при помощи винтов, образуя каркас рамы многосекционного модуля. На пластину 79 через калибровочные прокладки 81 и 82 установлены каретки профильных направляющий 83 и 84. На балку 77 устанавливается кронштейн 85. На кронштейн 85 крепится корпус 86, предназначенный для крепления гайки шарико-винтовой передачи 87. На пластину 80 при помощи калибровочных прокладок 88 и 89 закреплены пластины 90, 91 и 95,96 соответственно. К пластинам 90, 91 и 95, 96 крепятся пластины 92 и 97 соответственно. В свою очередь к пластинам 92 и 97 через калибровочные прокладки 93 и 98 закреплены каретки профильных направляющий 94 и 99. Использование калибровочных прокладок 81, 82, 88, 89, 93 и 98 обусловлено различными допусками и посадками деталей, входящих в размерную цепь. На пластине 80 при помощи пластины 100 закреплен корпус 101 гайки 102 шарико-винтовой передачи.
Рама многосекционного модуля является конструктивным элементом, связующий все мехатронные устройства линейного перемещения в одном корпусе. Установка всех мехатронных устройств линейного перемещения формирую матрицу, состоящую из девяноста восьми линейных мехатройнных элементов. Рама многосекционного модуля также является конструктивным элементом, связывающий модуль каркас с многосекционным модулем. Многосекционный модуль перемещается внутри модуля каркас на профильных линейных направляющий. В движение многосекционный модуль приводится узлом перемещения многосекционного модуля, установленным внутри модуля каркас. Преобразование вращательного движения, производимого узлом перемещения многосекционного модуля в линейное перемещение многосекционного модуля производится при помощи двух шарико-винтовых передач.
Крепление рамы многосекционного модуля внутри каркаса 3 осуществляется при помощи двух линейных профильных направляющих, в частности при помощи кареток 83, 84, 94 и 99. Перемещение рамы многосекционного модуля внутри каркаса 3 осуществляется при помощи двух шарико-винтовых передач, в частности при помощи гаек 87 и 102.
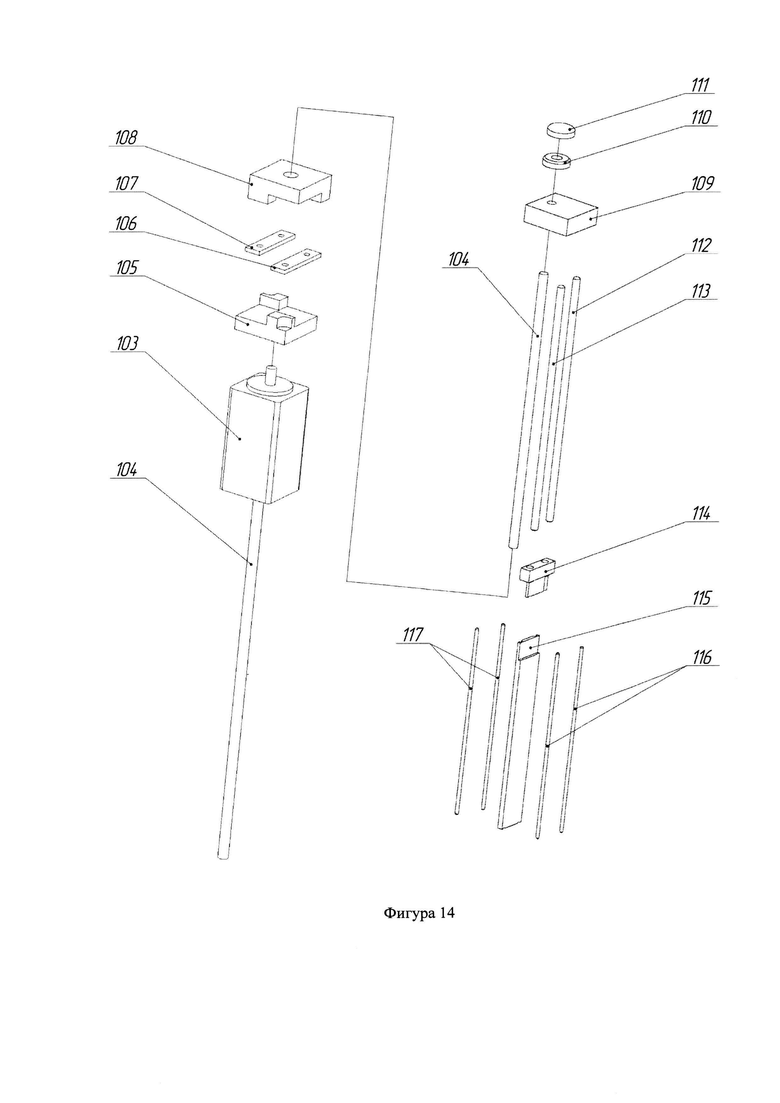
На фигуре 14 представлен внешний вид линейного мехатронного элемента. Основным элементом линейного мехатронного элемента является шаговый двигатель 103 с установленной внутри гайкой винтовой передачи, что позволяет при вращательном движении вала двигателя перемещать поступательно вал 104. На фланец шагового двигателя прикреплен фланец 105. В свою очередь, к фланцу 105 крепятся два одноточечных тензометрических датчика 106 и 107. Также к тензометрическим датчикам 106 и 107 закреплен фланец 108. Такое соединение позволяет измерить вес действующий на вал двигателя 104 при рассмотрении ситуации когда фланец 108 является неподвижным элементом. На валу 104 на одном конце закреплен фланец 109, являющимся не только рабочим органом линейного мехатронного элемента, но и опорным элементом для установки направляющих 112 и 113. Фланец 109 может быть изготовлен из полимерных материалов, что в свою очередь облегчает установку (прессовку) стальных направляющих 112 и 113. На вал 104 устанавливается кольцо 110 и закрепляется при помощи винта. Кольцо 110 установлено так, что нагрузка, действующая на это кольцо, передается на вал 104 и не передается на фланец 109 на кольце 110 установлен демпфирующий элемент 111. На другой конец направляющих 112 и ИЗ устанавливается переходной кронштейн 114, связывающий тонкостенный опорный элемент пластину 115 с направляющими 112 и 113. Тонкостенная пластина 115 служит опорным элементом для закрепления датчика измерения линейного перемещения. Пластина 115 изготавливается из полимерных материалов, следовательно, для придания жесткости пластине необходимо снабдить ее дополнительными изделиями. Датчик измерения линейного перемещения строится на магнитном принципе, представляющий собой плату датчика 125 и ответную часть в виде пластины с магнитным полем. Пластина с магнитным полем крепится к тонкостенной пластине 115 при помощи специализированного клея. Для придания жесткости тонкостенной пластине 115 вдоль длинной стенки на самой пластине сделаны посадочные места для установки дополнительных стальных прутков в количестве четырех штук 116 и 117 (по два прутка на сторону). Крепление стальных прутков 116 и 117 к полимерной пластине 115 производится при помощи специализированного клея.
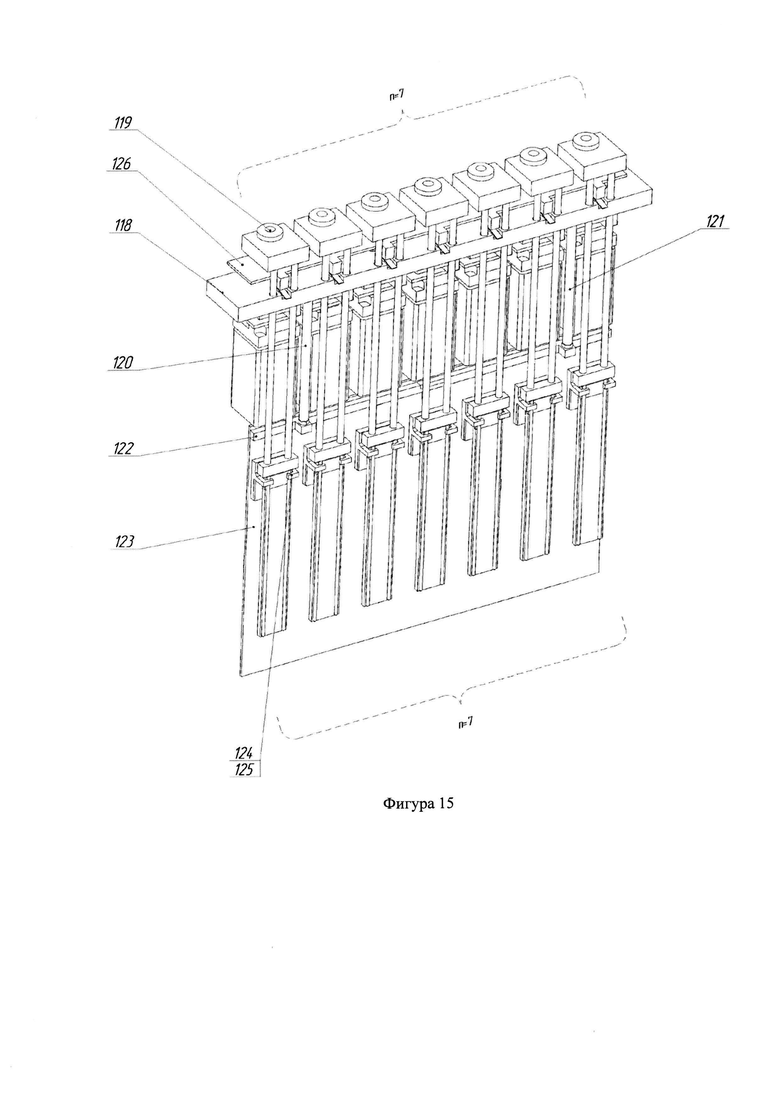
На фигуре 15 представлен внешний вид мехатронного устройства линейного перемещения. Мехатронное устройство линейного перемещения включает в себя семь линейных мехатронных элемента 119, закрепленных на опорной детали - пластине 118. К опорной пластине 118 прикреплены стойки 120 и 121. К этим стойкам крепится кронштейн 122, к которому в свою очередь, прикрепляется управляющая плата 123 мехатронный устройством линейного перемещения. Помимо управляющих функций плата 123 является опорным элементом для платы датчика измерения линейного перемещения 125, установленной и прикрепленной к плате 123 при помощи кронштейна 124. С другой стороны (противоположной от шаговых двигателей 103) пластины 118 при помощи стоек закреплена плата 126, на которой располагаются четырнадцать концевых датчиков, выполняющие роль определителя конечного положения линейного мехатронного элемента.
Многосекционный модуль является устройством, предназначенное для формирования поверхностного слоя, расположенных над ним объектов. В качестве таких объектов выступают рентгенопрозрачные пластины прямоугольной формы, образующие блок рентгенопрозрачных пластин, установленный в модуле прижатия.
Основными элементами многосекционного модуля являются: линейный мехатронный элемент, мехатронное устройство линейного перемещения и рама многосекционного модуля.
Мехатронное устройство линейного перемещения, в состав которого входят направляющие и встраиваемые линейные датчики положения, является устройством содержащее в себе семь линейных мехатронных элементов, и способное осуществлять линейное перемещение упругих упоров посредством управления с корректировкой обратной связи по положению. Линейный мехатронный элемент строится на основе шагового двигателя с конструктивно интегрированной винтовой передачей, преобразующее вращательное движение вала двигателя в поступательное перемещение вала винтовой передачи. Линейный мехатронный элемент это конструктивный элемент с силовым очувствлением, несущий двигательную функцию упругого упора. В его состав входит датчик измерения усилия и упругий упор. Таким образом, установка датчика измерения усилия в каждый линейный мехатронный элемент позволяет измерять силу, действующую на вал винтовой передачи.
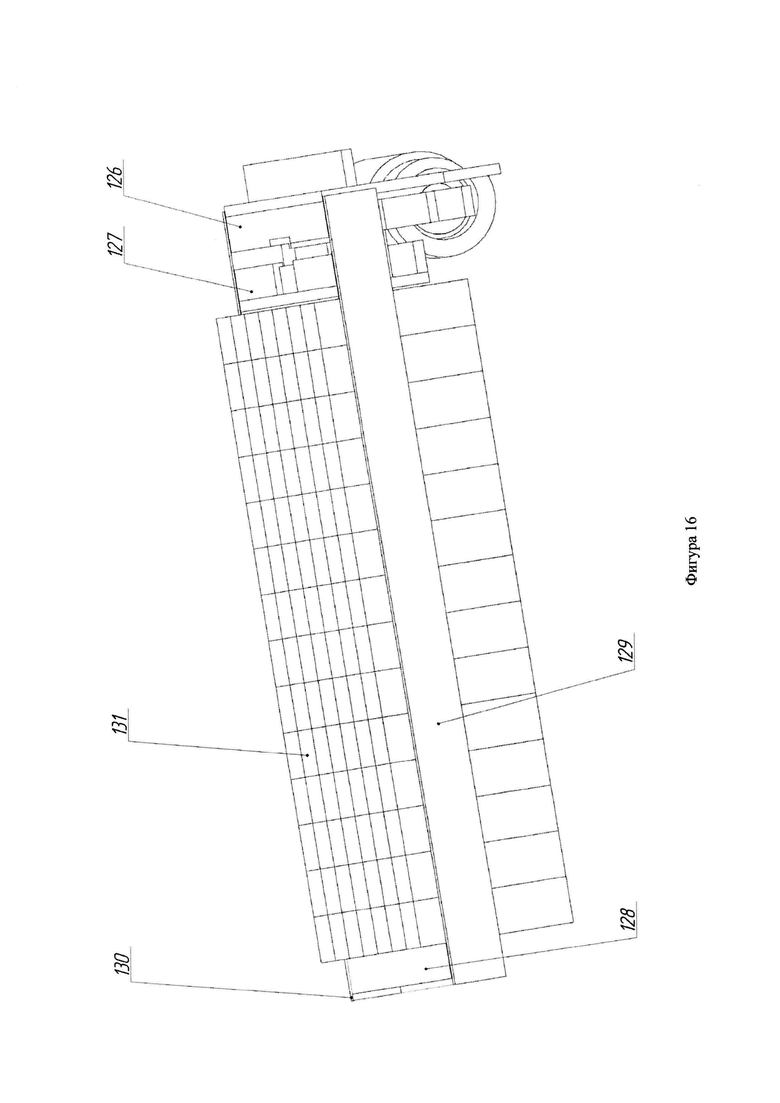
На фигуре 16 представлен внешний вид модуля прижатия. Модуль прижатия состоит из 6 компонентов: узла перемещения клинового соединения, клинового соединения, прижима с возможностью измерения силы прижатия, прижимной детали, комплекта крепежных балок и блока рентгенопрозрачных пластин.
Блок рентгенопрозрачных пластин состоит из набора рентгенопрозрачных брусков прямоугольной формы, составленных в блок, образуя матрицу поверхности, где длинна формируется из 14 штук брусков, а ширина из 7 штук.
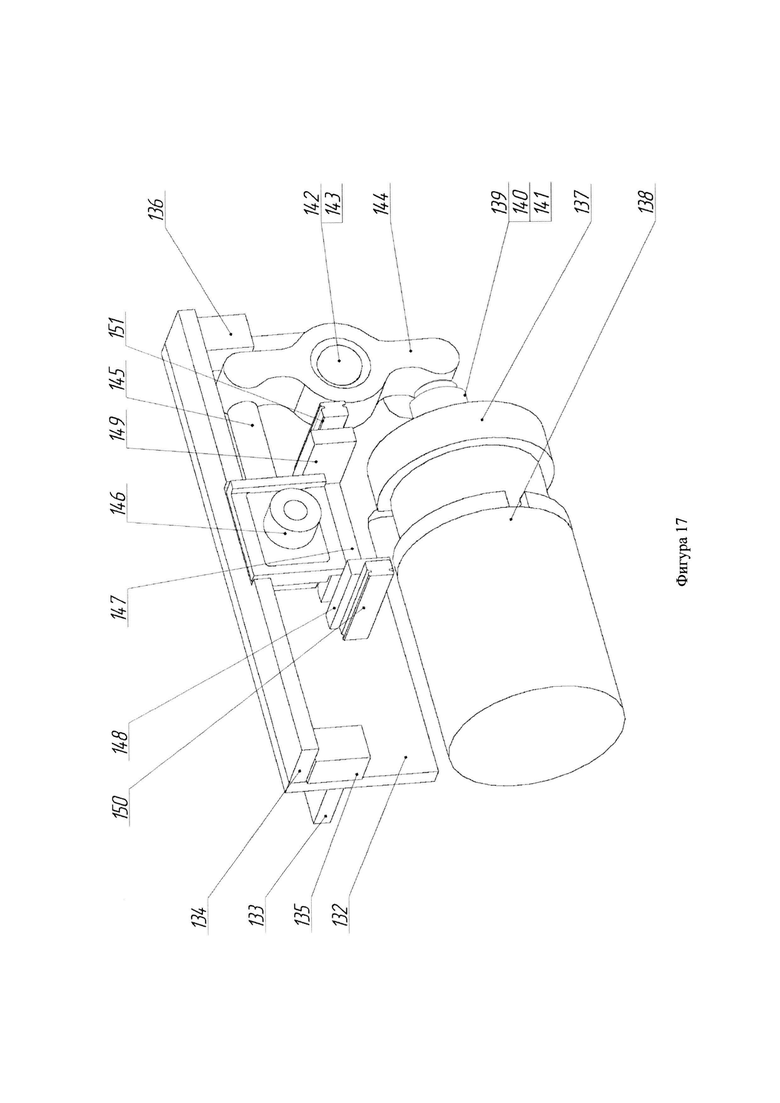
На фигуре 17 представлен внешний вид узла перемещения клинового соединения. Опорным элементом для всех входящих в состав деталей является пластина 132. Для присоединения узла перемещения клинового соединения 126 с модулем каркас 3 используется пластина 133, присоединенная к пластине 132 при помощи винтов. С обратной стороны пластины 132 присоединена пластина 134, выполняющая роль ребра жесткости всей конструкции узла, а также пластина 134 является опорным элементом для клинового соединения 146. Вторым опорным элементов клинового соединения является плитка 147, которая также прикреплена к опорной плите 132. Для соединения узла перемещения клинового соединения с прижимной деталью 130 используются комплект крепежных балок, состоящий из двух балок 129 и 130. Соединения крепежных балок 129 и 130 к опорной плите 132 происходит при помощи кронштейнов 135 и 136. Крепежные балки 129 и 130 крепятся к кронштейнам 135 и 136 соответственно при помощи двух винтов и двух штифтов.
Для крепления привода 138, передающего силу прижатия на клиновое соединение, к опорной пластине 132 используется кронштейн 137. На валу привода 138 закреплен переходной фланец 139, к которому в свою очередь закреплена гайка винтовой передачи 140. Винт трапецеидальной винтовой передачи 141 входит в свободное зацепление с толкателем 144, закрепленным на опорной пластине 132 при помощи вала 142, на котором располагается подшипник 143. При помощи подшипника 143 толкатель 144 имеет возможность вращаться вокруг оси вала 142. В свою очередь толкатель 144 входит в свободное зацепление с валом 145. Вал 145 одной торцевой поверхность входит в свободное зацепление с толкателем 144, а другой конец жестко закреплен в клиновом соединении.
Для крепления прижима 127 и перпендикулярного перемещения относительно пластины 132 на опорной пластине 132 установлены рельсы профильных направляющих 150 и 151. Крепление рельс профильных направляющих 150 и 151 к опорной платине 132 происходит при помощи пластин 148 и 149.
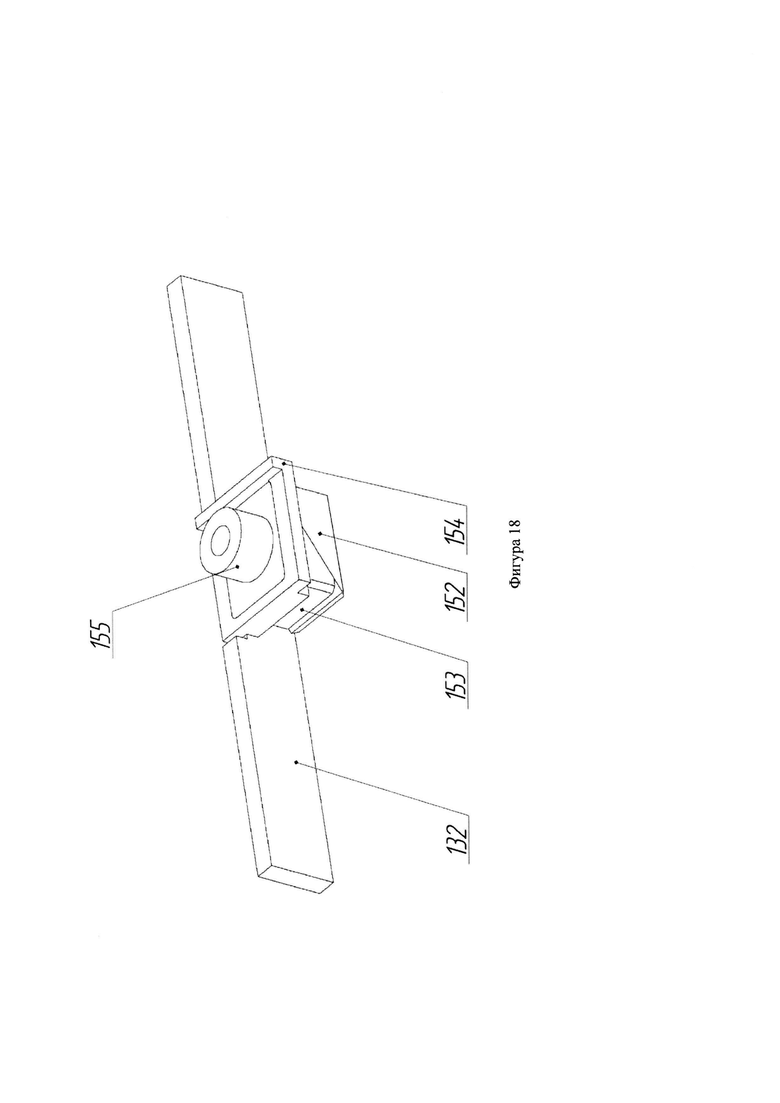
На фигуре 18 представлен внешний вид клинового соединения. Основными элементами клинового соединения являются клинья 152 и 153. При перемещении клина 152 вдоль опорной плиты 132, клин 153 совершает поступательное движение в перпендикулярном направлении. Для ограничения и направления движения клина 152 используется платина 134 с одной стороны и опорная плитка 147 с другой стороны. В качестве корпуса клина 153 также выступают пластина 134 и опорная плитка 147, однако, для ограничения перемещения клина 153 вдоль опорной пластины 132 не в перпендикулярном направлении используется крышка 154, закрепленная на ребре 134 одной стороной и на опорной плитке другой. Для передачи поступательного движения от клинового соединения к прижиму, на клине 153 установлен вал 155.
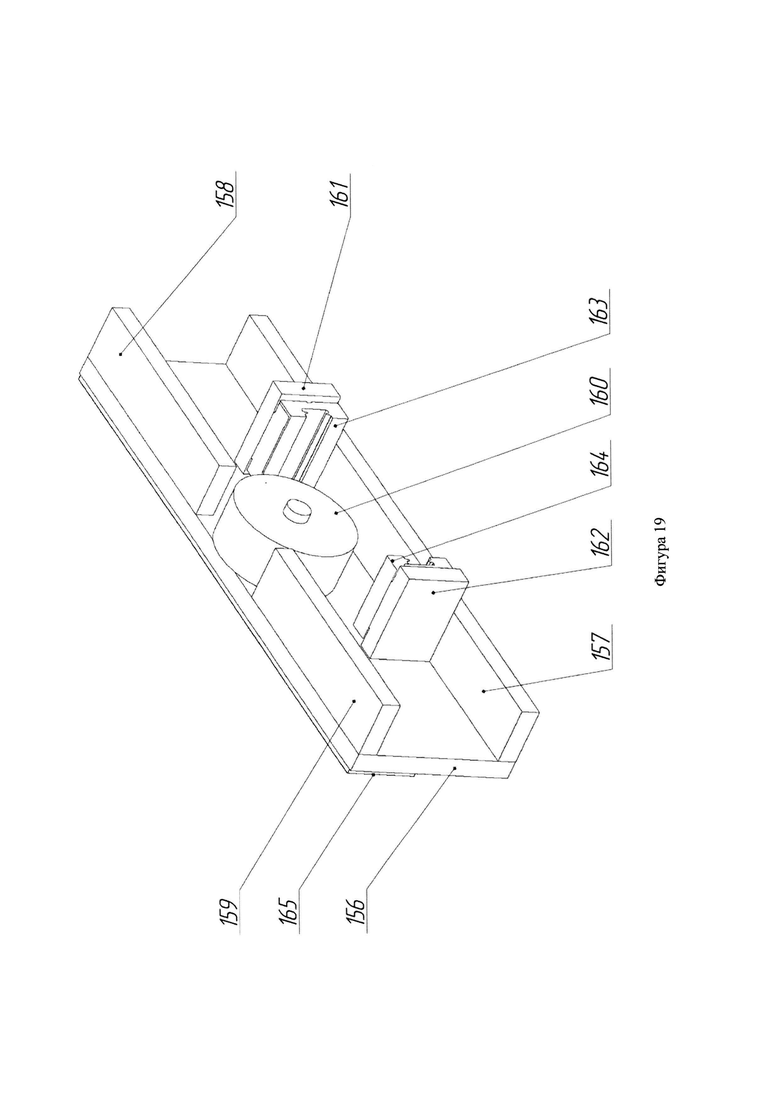
На фигуре 19 представлен внешний вид прижима с возможностью измерения силы прижатия. На опорной платине 156 закреплено ребро жесткости 157. Ребро жесткости 157 выступает в качестве опорной детали пластин 161 и 162, закрепленных на ней. На пластинах 161 и 162 закреплены каретки профильных направляющих, обеспечивающие крепление и перпендикулярное перемещение прижима 127 относительно узла перемещения клинового соединения 126. На опорной поверхности также закреплены дополнительные пластины 158 и 159, выполняющие роль дополнительных ребер жесткости прижима. Для измерения силы прижатия используется тензометрический датчик 160, закрепленный на опорной пластине 156. На обратной стороне опорной пластины 156 прикреплена демпфирующая прокладка 165, из прорезиненного материала.
Принцип действия модуля прижатия заключается в том, что привод 138 создает крутящий момент. Винтовая пара, состоящая из трапецеидальной гайки 140 и трапецеидального винта 141 преобразует вращательное движение вала привода 138 в поступательное движение винта 141. Трапецеидальный винт 141, находящийся в свободное зацепление с одним концом толкателя 144, приводит в движение толкатель 144, совершающий вращательное перемещение вокруг оси вала 142. Противоположный конец толкателя 144 находится в свободном контакте с валом 145, который приводит в движение клиновое соединение, а именно толкает клин 152 в параллельном направлении, относительно трапецеидального винта 141. Клин 152 входит в зацепление с клином 153. Перемещение клина 152 приводит к перемещению клина 153 в перпендикулярном направлении, относительно движения клина 152. Клин 153, при помощи вала 155 давит на тензометрический датчик 160, который в свою очередь передает силу прижатия на опорную пластину 156.
Так как прижимная деталь 128 жестко зафиксирована относительно узла перемещения клинового соединения 126, при помощи балок 129 и 130, то усилие, передаваемое прижимом 156 и распределенное демпфирующей прокладкой 165, происходит прижатие отдельных рентгенопрозрачных брусков, входящих в состав блока рентгенопрозрачных пластин 131, к прижимной детали 128 и выборка внутренних зазоров блока рентгенопрозрачных пластин 131.
Модуль прижатия - это устройство, предназначенное для фиксации сформированного поверхностного слоя из прямоугольных пластин путем прижатия их с двух, противоположных сторон.
Основными элементами модуля прижатия являются: блок рентгенопрозрачных пластин, узел перемещения клина, клиновое соединение, прижим с возможностью измерения силы прижима.
Блок рентгенопрозрачных пластин представляет собой набор из девяноста восьми рентгенопрозрачных пластин, образуя матрицу части опорной поверхности столешницы операционного стола размером n=14 шт., m=7 шт. Узел перемещения клина является устройством, позволяющее перемещать клин и создавать полезное усилие в клиновом соединении. Узел перемещения клина состоит из привода, винтовой передачи, при помощи которой происходит преобразование вращательного движения вала привода в линейное перемещение вала винтовой передачи, системы передачи усилия, представленная в виде маятникового рычага. Клиновое соединение представляет собой конструктивный элемент, состоящий из двух клинов, соприкасающихся друг с другом, и предназначенный для передачи усилия с умножающим коэффициентом. Прижим с возможностью измерения силы прижима является устройством с направляющими, оснащенное датчиком измерения усилия, позволяющего определять усилие, с которым осуществляется направляемое прижатие. Таким образом, принцип фиксации рентгенопрозрачных пластин представляет собой процесс: привод создает крутящий момент, совершая вращательное движение вала, при помощи передачи винт-гайка скольжения, вращательное движение преобразуется в линейное перемещения вала винтовой переда. Вал винтовой передачи при помощи механизма маятникового рычага передает линейное движение с вала винтовой передачи на клиновое соединение. Клиновое соединение, в свою очередь, взаимодействует с прижимом, передавая осевую силу с умножающим коэффициентом. Прижим взаимодействует с рентгенопрозрачными пластина прижимая их к опорной поверхности, что в последствии ведет к фиксации этих пластин в пространстве в определенном взаимоопределенном положении между отдельными рентгенопрозрачными пластинами.
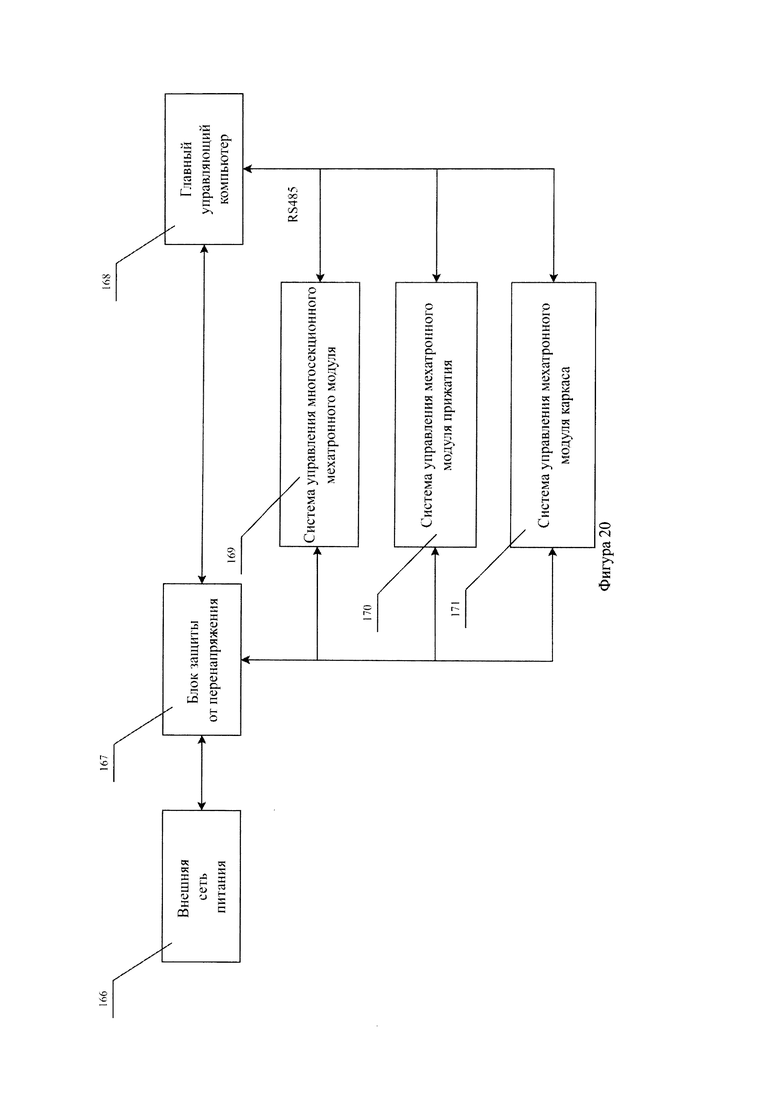
Общая структурная схема системы управления мехатронной системы формирования индивидуального интраоперационного положения пациента представлена на фигуре 20. Система управления состоит из нескольких управляющих частей:
- Система управления многосекционного модуля.
- Система управления модулем прижатия.
- Система управления модуля каркаса.
- Главный управляющий компьютер.
- Блок защиты от перенапряжения.
Блок защиты от перенапряжения 167 получает энергию от внешней сети питания 166 и передает ее на все компоненты системы управления. При этом, в случае отключения или перепадов входного переменного напряжения, данный блок осуществляет переход на внутренний источник питания с передачей сигнала главному управляющему компьютеру о проблемах с питанием. Взаимодействие компонентов на информационном уровне, а именно прием и передача управляющих команд и передача данных идет посредством интерфейса RS485 по проводным линиям связи. Все компоненты системы управления сопряжены проводными линиями локальную сеть устройств.
Система управления многосекционного модуля 169 сопряжена с блоком защиты от перенапряжений 167 и с главным управляющим компьютером 168 по локальной сети устройств. Ее задачей является обеспечение перемещений 98 линейных мехатронных элементов, а также передачу информации с датчиков расположенных внутри мехатронных элементов данной системы в зависимости от команд, приходящих от внешнего управляющего устройства.
Система управления модуля прижатия 176 сопряжена с блоком защиты от перенапряжений 167 и с главным управляющим компьютером 168 по локальной сети устройств. Ее задачей является осуществление перемещения и фиксации 7-и узлов перемещения клина, посредством управления одним узлом в единицу времени в зависимости от управляющих команд главного управляющего компьютера 168. Помимо этого, данная система управления осуществляет управление узлом перемещения многосекционного модуля, ответственным за перемещение в заданное положение многосекционного модуля.
Система управления модуля каркаса 171 сопряжена с блоком защиты от перенапряжений 167 и главным управляющим компьютером 168 посредством локальной сети устройств. Задачей системы управления модуля каркаса 171 является передача данных от устройства измерения веса и управление линейным мехатронным устройством в зависимости от команд, поступающих от главного управляющего компьютера.
Взаимосвязь конструктивных и электрических элементов мехатронных модулей системы формирования индивидуального интраоперационного положения пациента показана на фигуре 21. В верхней части отражена группа конструктивных компонентов. Первым является модуль каркас 1 включающий в себя устройство измерения веса 40, узел перемещения многосекционного модуля 227, раму 75 и опорные колонны 231. Вторым в данной группе является многосекционный модуль 2. Данный модуль включает в себя несколько устройств линейного перемещения 176, 177, раму 75 и узел перемещения многосекционного модуля 227. Третьим из группы является модуль прижатия 3. Он включает в себя клиновое соединение 228, прижим с возможностью измерения силы прижима 230, группу узлов перемещения клина 201, блок ренгенопрозрачных пластин 229 и узел перемещения 227. На фигуре видно, что многосекционный модуль 2 и модуль каркас 1 имеют общий компонент в виде рамы 75. Узел перемещения многосекционного модуля 227 является общим компонентов для всех вышеописанных модулей.
Логические связи между системами управления мехатронных систем и их конструктивными частями в виде мехатронных модулей показаны в виде штриховых линий. Таким образом отражено взаимопроникновение мехатронных модулей и их систем управления. Система управления многосекционного модуля 169, включающая в себя блок преобразователя интерфейсов 174 и блок питания многосекционного модуля 175, логически связанна с конструктивными элементами через связь блока преобразователя интерфейсов 174 и мехатронных устройств линейных перемещений 176, 177. Система управления модуля каркаса 171, имеет связь с устройством измерения веса модуля прижатия 40 через свой блок АЦП 232. Помимо этого, данная система управления имеет общие компоненты с системой управления модуля прижатия 170, а именно блок преобразователя данных с энкодера 199, блок управления модуля прижатия 193, блок подачи аналоговых сигналов 198 и безопасный драйвер 196. Данные четыре компонента являются отдельно системой управления узла перемещения многосекционного мехатронного модуля 233. Система управления модуля прижатия 170, так же имеет свои компоненты в виде блока коммутации узлов перемещения клина 194, который связан с компонентами модуля прижатия, блока АЦП 195, который связан с прижимом 230, и блоком питания модуля прижатия 192.
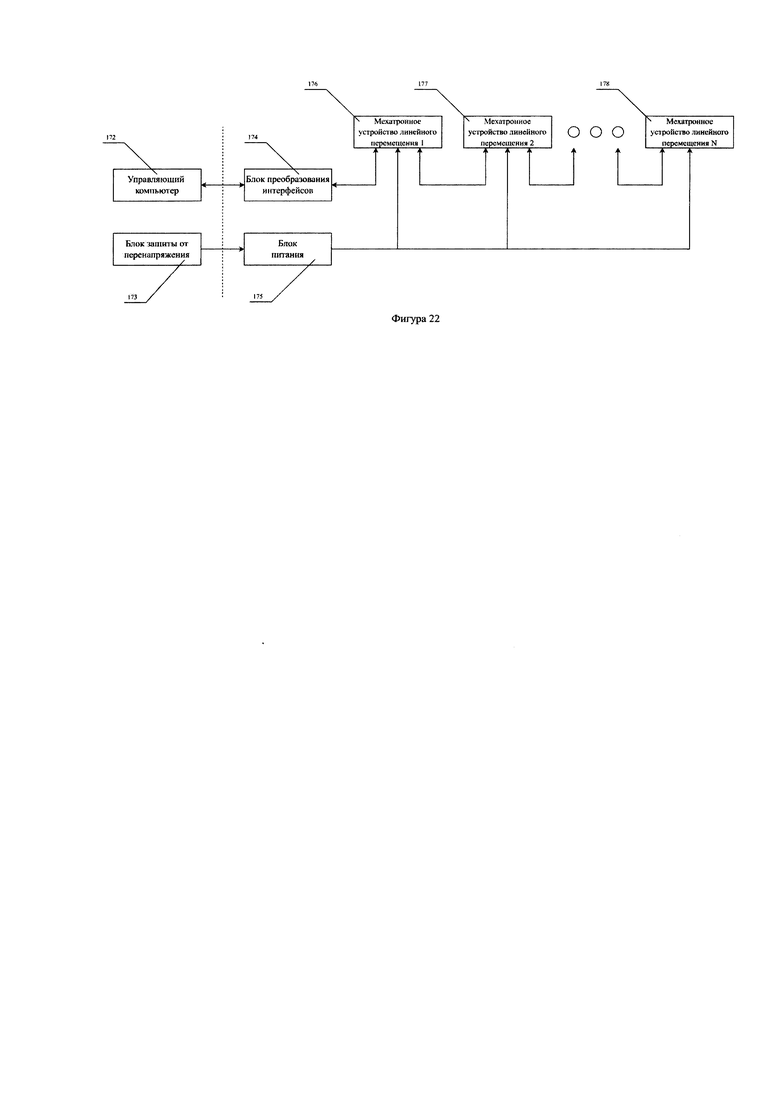
Структурная схема системы управления многосекционного модуля представлена на фигуре 22. Данная система состоит из группы одинаковых мехатронных устройств линейного перемещения 176-178 сопряженных между собой и с блоком преобразователем интерфейсов посредством общей шины данных. Блок преобразователь интерфейсов 174 используется для преобразования управляющих команд, приходящих по локальной сети устройств на базе интерфейса RS485 в команды для мехатронных устройств линейного перемещения 176-178 передаваемых через внутреннюю шину данных многосекционного модуля. Питание всех элементов системы управления осуществляется посредством блока питания многосекционного модуля 175, располагающегося в корпусе системы управления.
Конструктивно, мехатронные устройства линейного перемещения закреплены параллельно на металлическом каркасе, что позволяет выполнить его основную задачу, а именно - реализация двигательных функций при формировании индивидуального интраоперационного положения пациента.
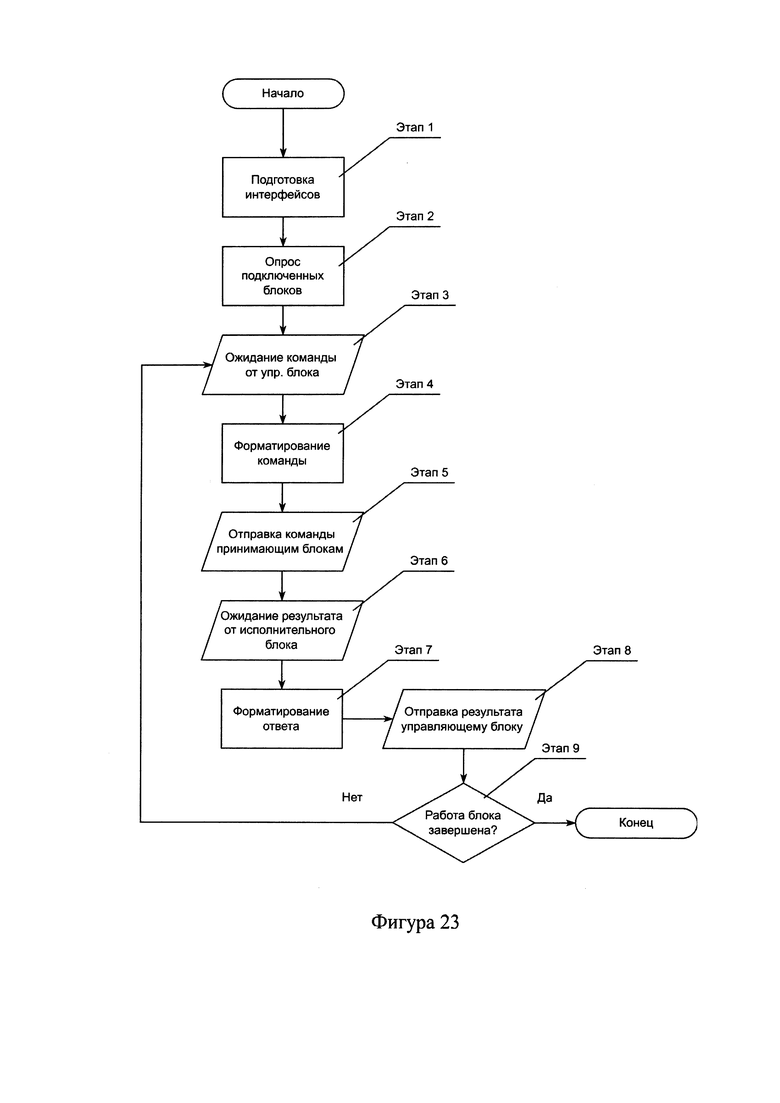
Мехатронные устройства линейного перемещения могут управляться как индивидуально, так и в составе сети устройств, подключенных по общей шине данных, где их максимальное количество может достигать 31-го экземпляра. Сопряжение модулей осуществляется путем проводного соединения через два идентичных коннектора на устройстве. Один из них является входом провода, другой его выходом. Таким образом в рамках многосекционного модуля получается создать внутреннюю сеть устройств с топологией общая шина. В составе сети, каждый модуль обладает адресом, что позволяет обращаться к нему отдельно от остальных, не исключая возможности отправки общей команды для всех модулей. Управление мехатронными устройствами линейного перемещения осуществляет блок преобразователя интерфейсов 174. В задачи данного блока входит получение управляющих команд от управляющего компьютера 172. В соответствии с данными командами устройство формирует управляющие команды для для всех подключенных мехатронных устройств линейного перемещения 176-178. Алгоритм работы блока преобразователя интерфейсов представлен на фигуре 23.
На этапе 1 происходит подготовка интерфейсов. Блок преобразователя интерфейсов устанавливает связь с главным управляющим компьютером и всеми мехатронными устройствами линейного перемещения. Далее (на этапе 2) происходит опрос подключенных устройств. Производится получение адресов, считывание текущего положения линейных подвижностей устройств, а также производится перевод линейных подвижностей устройств в нулевое положение. На этапе 3 происходит переход в режим ожидания внешней команды управления. В случае ее прихода, блок преобразователя интерфейсов осуществляет разбор приходящей команды и формирование команд для устройств (этап 4). Далее происходит отправка команд на все устройства (этап 6). После отправки блок преобразователя интерфейсов считывает полученные ответные сообщения от устройств и получив все ответы формирует сообщение ответа (этап 7). После формирования сообщение отправляется внешнему управляющему компьютеру. Также происходит проверка, если в качестве внешней команды была вызвана команда завершения работы, то после отправки данной команды на все сопряженные устройства отключается до следующей подачи питания на систему управления (этапы 8,9). Иначе происходит возврат к этапу 3.
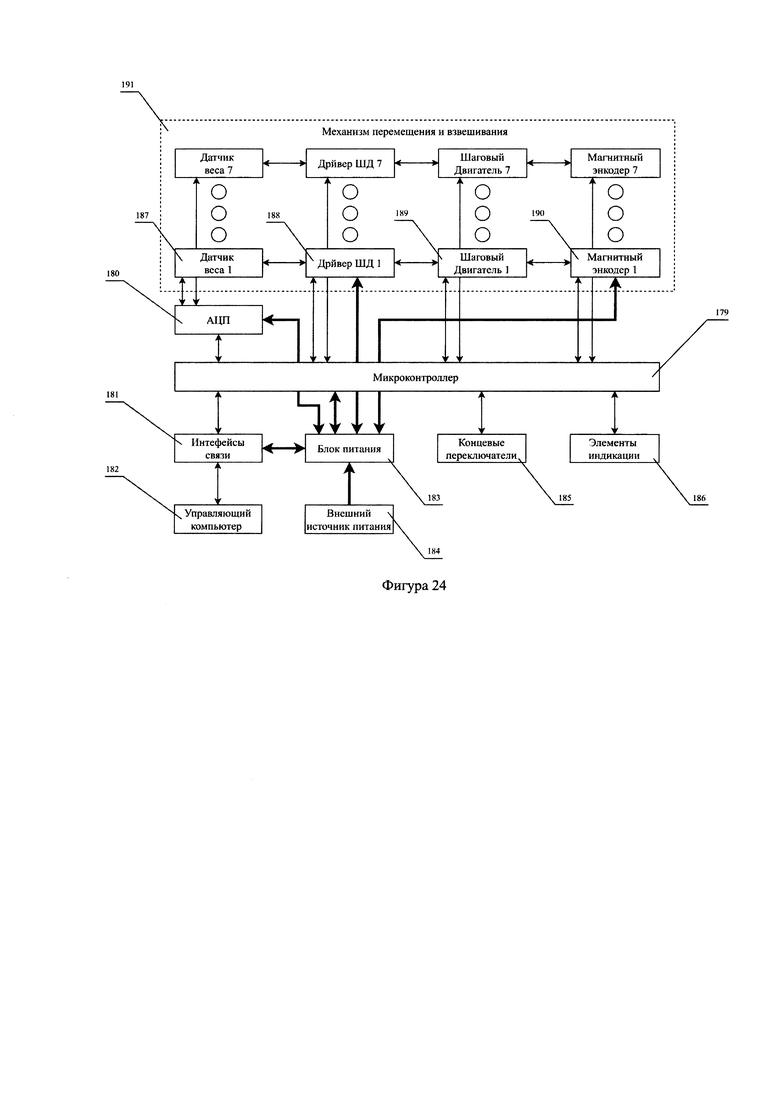
Структурная схема линейного мехатронного устройства представлена на фигуре 24. Подача питания на все компоненты линейного мехатронного устройства осуществляется посредством блока питания 183. Данный блок сопряжен с драйверами шагового двигателя 188, микроконтроллером 179, интерфейсами связи 181, АЦП 180 и магнитными энкодерами 190. Блок питания осуществляет подачу стабилизированного постоянного напряжения всем элементам мехатронного устройства и обеспечивает защиту от перепадов напряжения по питанию.
Для управления линейным мехатронным модулем используется микроконтроллер 179. Он сопряжен с аналогово-цифровым преобразователем АЦП 180, семью драйверами шаговых двигателей 188, семью встраиваемыми линейными магнитными энкодерами линейных перемещений 190, интерфейсами связи 181, элементами индикации и блоком питания 183. Передавая управляющие сигналы на драйвер 188 осуществляет управление шаговыми двигателями линейных приводов 189. Микроконтроллер 179 задает перемещение подвижных элементов схемы вдоль одной оси. Перемещение вдоль оси измеряется встраиваемыми линейными магнитными энкодерами 190, сигналы которого обрабатываются собственным МК-обработчиком. Усилие, создаваемое внешними силами вдоль оси, определяется датчиками веса 187, параметры которого фиксируются аналого-цифровым преобразователем 180 и передаются МК 179.
Микроконтроллер в связке с драйверами шагового двигателя, шаговыми двигателями и встраиваемыми линейными магнитными энкодерами образует 7 приводов с обратной связью по положению вала 191. Микроконтроллер осуществляет управление данными приводами 191, следит за положением выходных валов линейного мехатронного устройства в соответствии с командами, приходящими от блока преобразователя интерфейсов.
В качестве датчиков обратной связи в мехатронном устройстве линейных перемещений используются встраиваемые магнитные линейные энкодеры 190. Данные энкодеры сопряжены с микроконтроллером, что позволяет при помощи выходных сигналов передавать информацию о линейном перемещении выходного вала приводов устройства.
Для управления шаговыми двигателями используются специализированные драйверы шаговых двигателей 188. Они сопряжены с блоком питания и микроконтроллером. Данные драйверы осуществляют прием управляющих сигналов от МК, в соответствии с которыми они преобразуют постоянный ток, приходящий с блока питания 183 в последовательность силовых импульсов для работы линейного привода 191.
АЦП 180 сопряжен с блоком питания и семью датчиками веса. АЦП, будучи запитанным от блока питания 183, осуществляет считывание данных с датчиков веса 187. Датчики веса, преобразуют питающий его ток, в зависимости от оказанного на них воздействия внешних сил в разницу потенциалов напряжения. Данная разница потенциалов фиксируется АЦП и преобразуется в цифровой формат с последующей отправкой главному МК 179 в виде, предусмотренном внутрисхемным протоколом по шине данных.
Прошивка, отладка, обмен данными с внешними элементами системы управления происходит при помощи различных преобразователей интерфейсов 181, входящих в состав модуля программных интерфейсов связи.
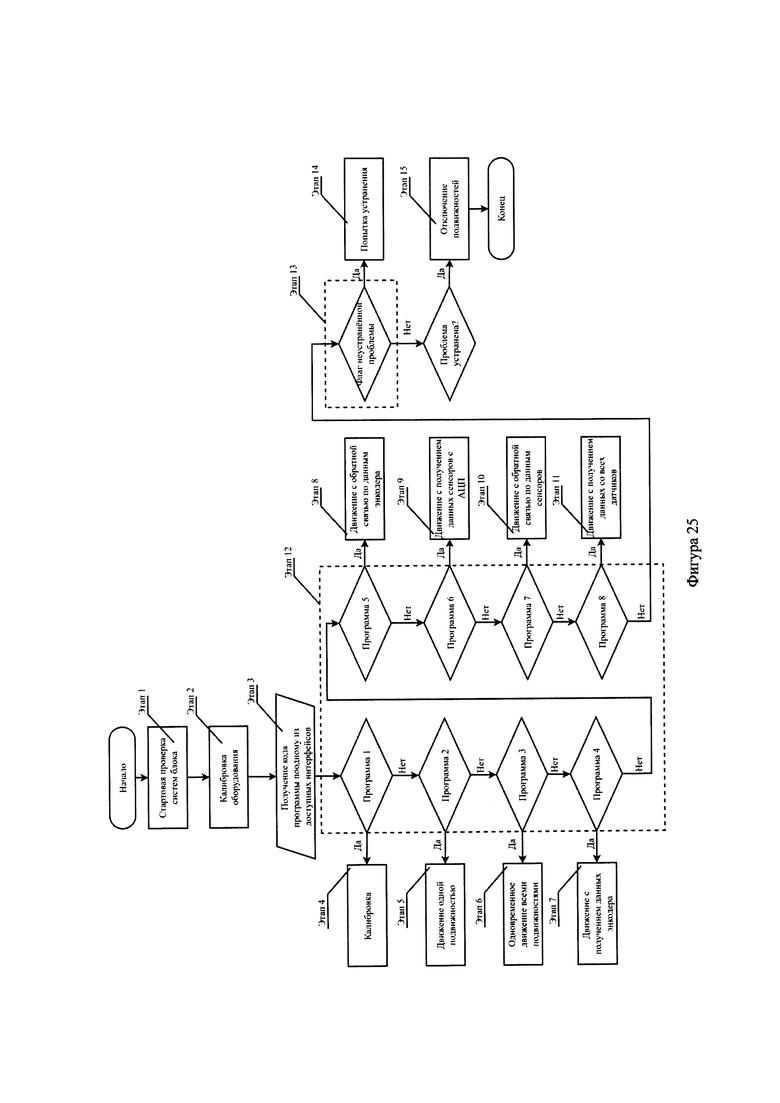
Блок схема алгоритма работы 7-и канального мехатронного модуля представлен на фигуре 25. После начала работы устройства производится стартовая проверка системы (этап 1). Данная проверка позволяет определить наличие подключенных встраиваемых линейных энкодеров в системе и ответ внутреннему АЦП о готовности к работе. После проверки системы происходит выставление в нулевое положение линейных подвижностей модулей (этап 2). Каждая из подвижностей опускается до своего нижнего положения. Таким образом получается выставить все линейные подвижности в начальное положение, в котором встраиваемые линейные энкодеры фиксируют начало отсчета для каждой из подвижностей, а АЦП тарирует датчики силы. Далее происходит переход в цикл ожидания команды от блока преобразователя интерфейсов (этап 3). В случае прихода команды происходит ее разбор. В зависимости от типа команды могут выполняться (этап 12) одна из следующих подпрограмм:
Настройка - описанный выше алгоритм для предварительной проверки элементов устройства, приведение их в рабочее положение с последующими замерами начальных положений и принятия их как нулевых, (этап 4)
Движение одной подвижностью - движение валом одной подвижности, без применения обратной связи, (этап 5)
Одновременное движение всеми подвижностями - то же, что и "Движение одной подвижностью", только с применением всех каналов, (этап 6)
Движение с получением данных от линейного энкодера - Движение одной подвижности с отправкой данных энкодера в блок преобразователя интерфейсов, (этап 7)
Движение с обратной связью по данным линейного энкодера - совершается начальное быстрое перемещение подвижности в заданное положение, затем корректировка по энкодеру положения, (этап 8)
Движение с получением данных от датчиков веса с АЦП - движение подвижности с параллельной передачей данных о силе, воздействующей в текущий момент на датчик веса, (этап 9)
Движение с обратной связью по датчикам веса - движение подвижности до установления силы, воздействующей на нее, с определенной величиной с точным контролем перемещения, (этап 10)
Движение с получением данных со всех датчиков - перемещение подвижности с обратной связью по энкодеру и параллельной отправкой данных со всех сенсоров силы, (этап 11)
В случае возникновения ошибок при выполнении программы происходит выставление флага не устраненной проблемы. По завершению программы происходит проверка наличия данного флага (этап 13). В случае отсутствия данного флага происходит возврат на этап ожидания команды от блока преобразователя интерфейсов (этап 3). В противном случае происходит запуск подпрограммы устранения ошибочного состояния внутренними средствами корректировки (этап 14), если эта подпрограмма не сработает, то произойдет отключение подвижностей (этап 15) и завершение управляющей программы.
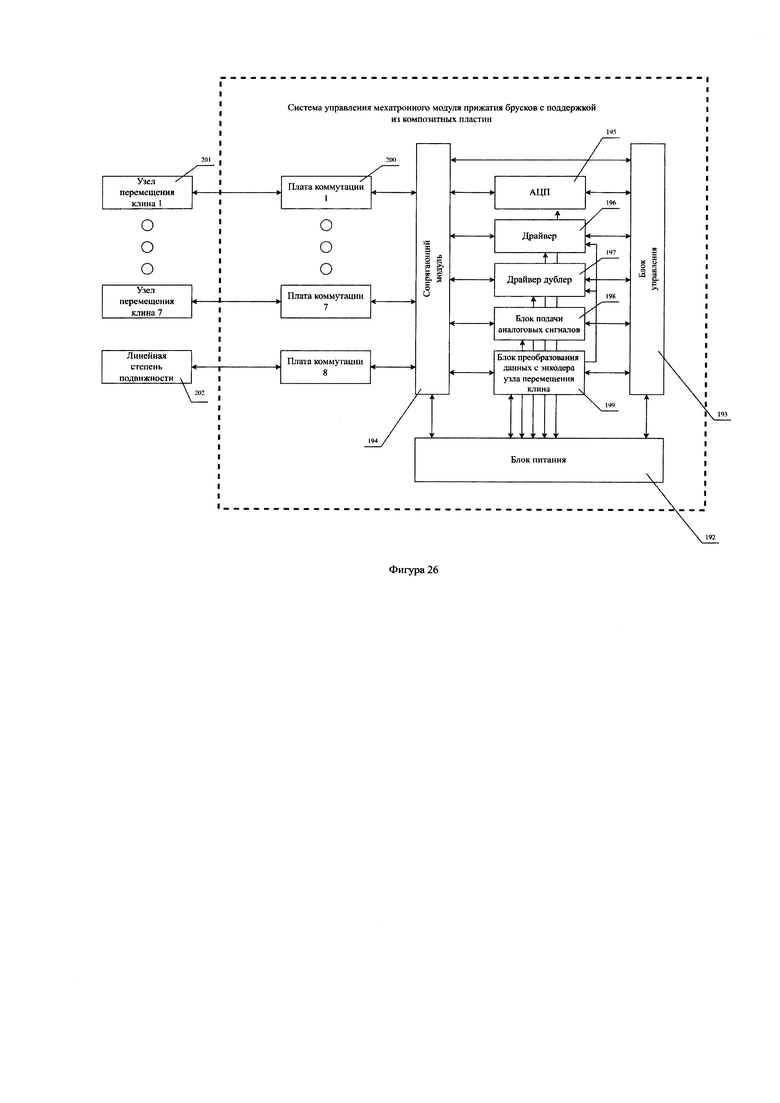
Структурная схема системы управления модуля прижатия брусков представлена на фигуре 26. Задачей данного элемента системы управления является осуществление перемещения и фиксации 7-и узлов фиксации клина 208, а также одним узлом перемещения многосекционного модуля. Система управления может управлять только одним из вышеперечисленных узлов в один момент времени. Выбор элемента происходит в зависимости от управляющих команд главного управляющего компьютера. Помимо этого, данная система управления осуществляет управление линейной степенью подвижности каркаса 202, ответственной за перемещение многосекционного модуля.
Узел перемещения клина 201 и узлом перемещения многосекционного модуля 202 включают в себя: бесколлекторный двигатель постоянного тока, угловой датчик обратной связи, датчик момента и тормоз.
Все узлы сопрягаются с системой управления через платы коммутации 200. Каждая плата коммутации сопряжена с узлом перемещения клина или линейным мехатронным элементом с одной стороны и сопрягающей платой 194 с другой. Задача платы коммутации: подключать или отключать силовые и информационные контакты от узла прижатия или узла перемещения к сопрягающей плате 194. Всего система управления модуля прижатия может содержать до восьми плат коммутации.
Управление состоянием плат коммутации производит сопрягающая плата 194. В сопрягающую плату подключены: платы коммутации 200, плата АЦП 195, драйвер 196 и драйвер дублер 197, блок подачи аналоговых сигналов 198, блок преобразования данных с энкодера узла перемещения клина 199. Задачей данной платы является сопряжение узла перемещения клина 201 или узлом перемещения многосекционного модуля 202 с элементами системы управления 193, 195-199 путем включения и выключения плат коммутации 200. Данный блок обеспечивает условие активности только одного узла 201/202 во время работы системы управления.
Блок питания 192 осуществляет подачу стабилизированного постоянного напряжения ко всем элементам системы управления модуля прижатия.
АЦП 195 сопряжен с блоком управления 193, блоком питания 192 и сопрягающей платой 194. Его задачей является считывание данных с датчика момента узлов перемещения клина 201 с последующей передачей на устройство управления 193.
Безопасный драйвер ММП 196, драйвер дублер 197 также сопряжены с блоком управления 193 и блоком питания 192 сопрягающей платой 194. Задачей драйвера в данной системе - управление валом узла перемещения клина или линейным мехатронным элементом в соответствии с данными приходящими от датчика обратной связи по положению узла или линейного элемента. При управлении всегда задействован только один из драйверов. Наличие драйвер дублера 197 обусловлено необходимостью обеспечения работы системы управления при выходе из строя основного драйвера. Управление драйвером осуществляет устройство управления в соответствии с управляющей программой.
Блок подачи аналоговых сигналов 198 сопряжен с блоком управления 193 и блоком питания сопрягающей платой. Задачей данного блока является передача управляющих сигналов на тормозное устройство узла перемещения клина 201.
Блок преобразования данных 199 с энкодера узла перемещения клина сопряжен с блоком управления 193, блоком питания, драйвером, драйвером дублером при помощи сопрягающей платы 194. Задача данного блока - преобразование сигналов, приходящих с энкодера в форму необходимую для работы драйвера 196/197. Также данный блок может передавать информацию о текущем положении блоку управления для дополнительного отслеживания перемещения вала узла перемещения клина или узлом перемещения многосекционного модуля.
Блок управления 193 отвечает за координацию работы всех других блоков системы управления модуля прижатия брусков в зависимости от команд, приходящих от внешнего управляющего устройства. Данный блок сопряжен с АЦП, драйвером, драйвером дублером, блоком подачи управляющих сигналов с помощью сопрягающей платы 194. Именно в нем выполняется управляющая программа системы.
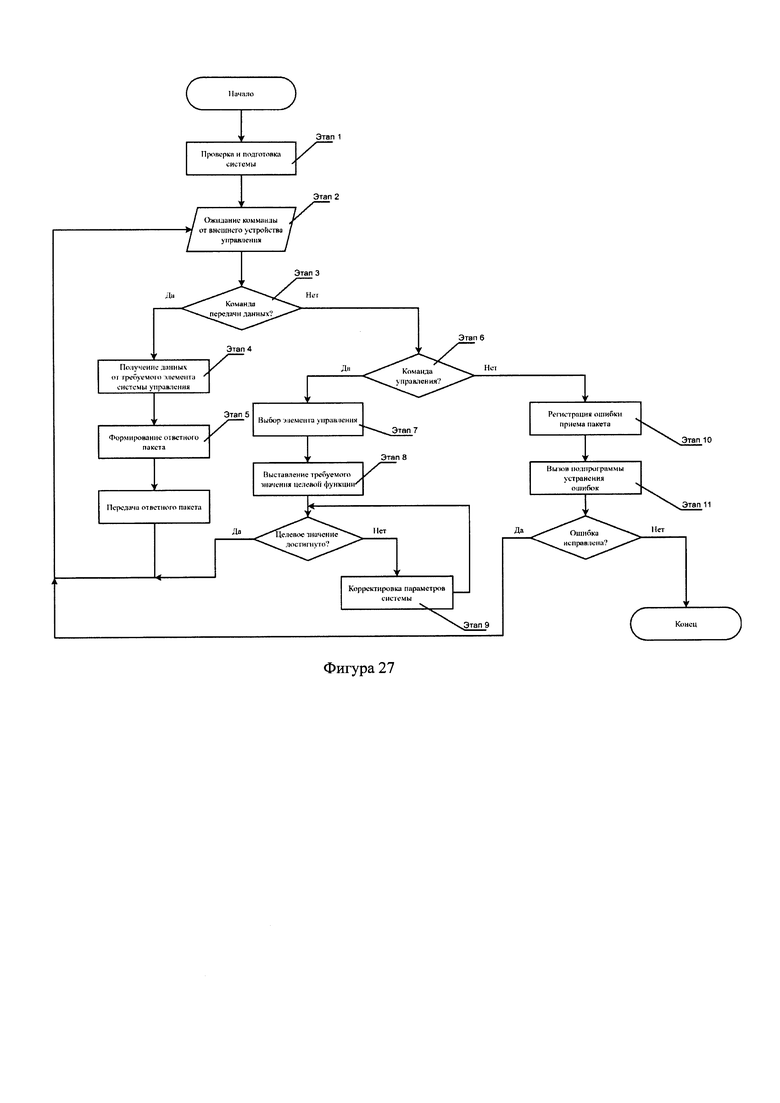
Алгоритм управляющей программы блока управления системы управления модуля прижатия представлена на фигуре 27.
При подаче питания на блок управления происходит проверка и подготовка системы к запуску (этап 1). Проверяется возможность связи с внешним устройством управления и готовность всех компонентов системы управления, их доступность для передачи и приема управляющих команд. После проверки происходит переход в цикл ожидания команды от внешнего устройства управления (этап 2). В случае прихода команды определяется ее тип (этап 3). Если внешнее устройство управления запрашивает данные от одного из элементов системы управления, то происходит переход в подпрограмму получения данных. В данной подпрограмме происходит опрос требуемого компонента системы управления (этап 4). Далее на базе полученных данных формируется ответный пакет данных (этап 5). После формирования пакета данных происходит передача данного пакета обратно внешнему управляющему устройству. В случае, если пришла команда управления (этап 6) происходит выбор элемента управления (этап 7), выставление требуемого значения целевой функции (этап 8). После чего система управления переходит в режим корректировки значения (этап 9). В данном режиме происходит регулировка параметров (этап 10) компонента до тех пор, пока не будет достигнута цель управления. В случае достижения значения целевой функции происходит переход к режиму ожидания команды от внешнего управляющего устройства (этапу 2). В случае если при обработке входящей команды от внешнего управляющего устройства не получилось ее дешифровать устройство переходит в режим регистрации ошибки приема пакета (этап 11). В данном режиме производится проверка всех компонентов системы управления. Для этого вызывается подпрограмма устранения ошибок (этап 12). В случае, если ошибку удалось устранить система управления возвращается к режиму ожидания управляющей команды от внешнего устройства управления, иначе происходит экстренное отключение системы.
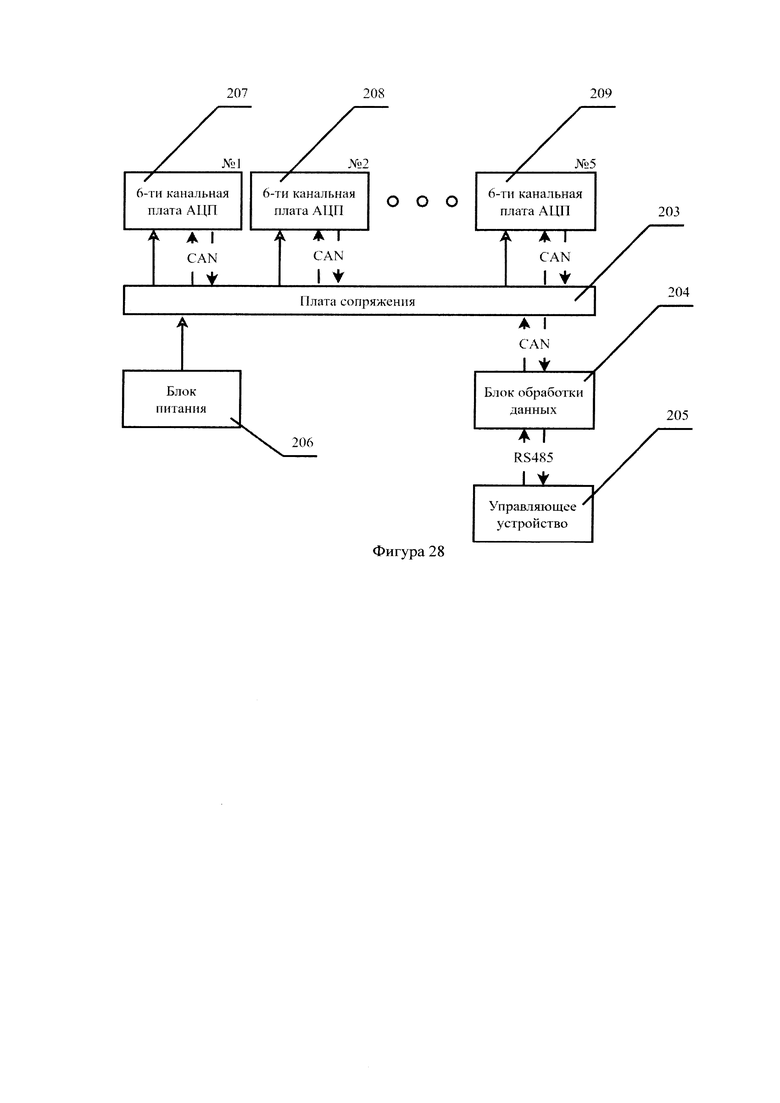
Система управления модуля каркаса для формирования индивидуального интраоперационного положения пациента. Система управления модуля каркаса состоит из двух основных компонентов: блока АЦП устройства измерения веса и системы управления узла перемещения многосекционного модуля. Система управления узла перемещения многосекционного модуля была описана ранее. Данная система представляет собой систему управления модуля прижатия брусков, где одним из узлов является узел перемещения многосекционного модуля. Структурная схема блока АЦП представлена на фигуре 28.
Блок АЦП - устройство, объединяющее в одном корпусе группу плат 207-209 в единую сеть устройств. Блок содержит несколько компонентов: блок питания 206, блок обработки данных 204, плата сопряжения 203, 6-ти канальные платы АЦП 207-209. Блок питания в рамках устройства обеспечивает питанием все компоненты системы. Данный блок подключается к плате сопряжения. Плата сопряжения участвует в распределении питающего напряжения блока питания, среди установленных в нее плат АЦП, а также объединяет их в единую сеть вместе с блоком обработки данных. Блок обработки данных в свою очередь подключен к сопрягающей плате и внешнему управляющему устройству. Его задачей является прием управляющих команд от внешнего управляющего устройства, и в соответствии с этими командами осуществление агрегации данных с 6-и канальных плат АЦП и выдача их в качестве пакетов данных как ответы на управляющие команды.
Основными элементами данного блока является 6-и канальные платы АЦП. Их структурная схема представлена на фигуре 29.
6-ти канальная плата АЦП - устройство задачей которого является считывание аналоговых сигналов с входных каналов. Плата АЦП состоит из двух основных чипов -непосредственно самого аналогового преобразователя 216 и управляющего микроконтроллера 215. Задачей управляющего микроконтроллера является дешифровка приходящих запросов от блока обработки данных 210, получение данных от АЦП 216, преобразование полученных данных от АЦП и формирование пакетов данных для отправки по общей шине данных блоку обработки 210 в соответствии с установленной программой. МК взаимодействует с внешним управляющим устройством посредством блока связи 218. Подключить модуль к внешнему устройству возможно при помощи двух коннекторов 212/213 как по отдельности, так и одновременно. Посредством слотового коннектора модуль получает питание для блока стабилизированных напряжений 217.
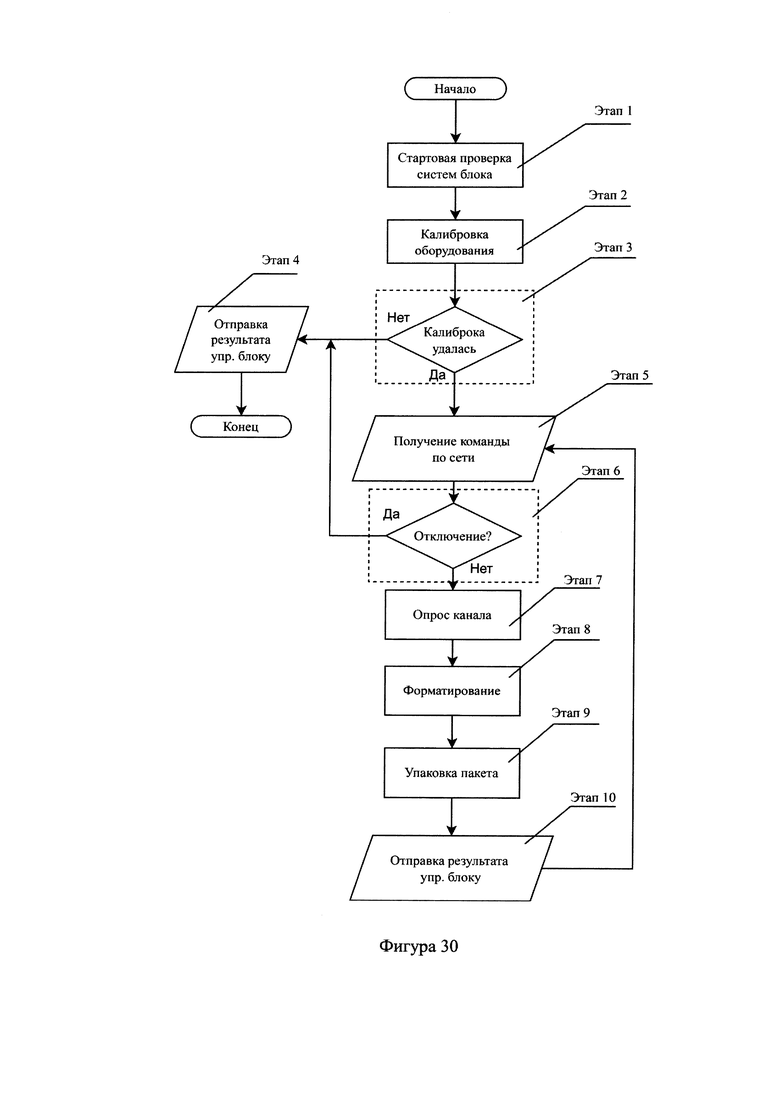
Для взаимодействия с платой АЦП внешнее устройство управления должно отправить команду через дублирующий или основной слотовый коннектор 212/213 блоку связи 218. Блок связи адаптирует сигнал для обработки МК, как и МК он получает питание от блока стабилизированных напряжений питания 217. МК обрабатывает команду предустановленным алгоритмом, управляя чипом АЦП через межкомпонентную шину данных. АЦП производит измерение аналогового сигнала с необходимого коннектора 219, кодирует значение и отправляет его по межкомпонентной шине данных обратно МК 215. Блок программирования МК 214 используется для диагностики и отладки. Подключится к нему возможно, как через основной слотовый коннектор 212, так и через дублирующий коннектор связи и программирования 213. Алгоритм работы программы платы АЦП представлен на фигуре 30.
При поступлении питания на плату АЦП, начинается выполнение алгоритма устройства. Начальная проверка систем блока выполняет тестирование протокола связи, определяет корректность поведения системы (Этап 1). Настройка определяет стартовые значения, полученные АЦП, тем самым тарируя устройства, подключенные к плате АЦП (Этап 2). Успешная настройка и корректность определенных значений, определяет последующий исход алгоритма (Этап 3), при возникновении ошибок настройки, бесконечный цикл алгоритма заканчивает работу отправкой данных о проблеме управляющему блоку (Этап 4). Если же настройка была успешно произведена, то плата ожидает команды по шине связи от управляющего устройства (Этап 5). Если была получена команда прекращения работы (Этап 6), повторяющийся алгоритм так же завершает работу с последующей отправкой данных управляющему блоку (Этап 4), о своем состоянии. Для нормального течения цикла, управляющее устройство отправляет команду на замер определенного канала (Этап 5), после чего происходит его опрос (Этап 7), затем преобразование данных (Этап 8), упаковка (Этап 9) и отправка управляющему блоку пакета с результатом измерений (Этап 10). После отправки, алгоритм ожидает получения новой управляющей команды по сети (Этап 5) и цикл (Этап 5-10) повторится вновь.
Технический результат, обеспечиваемый заявленным изобретением, заключается в расширении функциональных возможностей хирургических столов путем нового конструкторского решения, объединяющего в себе несколько сложных элементов. Мехатронная система формирования индивидуального интраоперационного положения пациента - основная часть инновационного хирургического робостола, реализующая двигательные функции при формировании индивидуального интраоперационного положения пациента. Формирование общей опорной поверхности, на которой располагается пациент, происходит последовательно и формируется из отдельных опорных поверхностей малого размера. Формирование опорной поверхности - столешницы мехатронной системы формирования индивидуального интраоперационного расположения пациента происходит при помощи перемещения отдельных рентгенопрозрачных пластин в вертикальном направлении. Перемещение отдельных рентгенопрозрачных пластин происходить при помощи многосекционного модуля, установленной в модуле каркас, и имеет возможность перемещения вдоль продольной стороны модуля каркас, занимая одно из семи определенных положений, соответствующих положению модулей прижатия. Каждая отдельная рентгенопрозрачная пластина соответствует отдельному линейному мехатронному элемента, установленному в многосекционном модуле.
Краткое описание чертежей
Патент включает в себя 31 фигуру, описывающую конструкцию и конструктивные особенности мехатронной системы формирования индивидуального интраоперационного положения пациента.
Фигура 1 - Структура механической части мехатронной системы формирования индивидуального интраоперационного положения пациента
Фигура 2 - Внешний вид мехатронной системы формирования индивидуального интраоперационного положения пациента
Фигура 3 - Внешний вид (разрез) мехатронной системы формирования индивидуального интраоперационного положения пациента
Фигура 4 - Внешний вид модуля каркас (вид 1)
Фигура 5 - Внешний вид модуля каркас (вид 2)
Фигура 6 - Внешний вид системы ременных передач
Фигура 7 - Устройство измерения веса модуля прижатия
Фигура 8 - Внешний вид опорной колонны
Фигура 9 - Модуль вращения
Фигура 10 - Внешний вид опорной колонны
Фигура 11 - Внешний вид поперечной рамы модуля каркас
Фигура 12 - Внешний вид многосекционного модуля
Фигура 13 - Внешний вид рамы многосекционного модуля
Фигура 14 - Внешний вид линейного мехатронного элемента
Фигура 15 - Внешний вид мехатронного устройства линейного перемещения
Фигура 16 - Внешний вид модуля прижатия
Фигура 17 - Внешний вид узла перемещения клинового соединения
Фигура 18 - Внешний вид клинового соединения
Фигура 19 - Внешний вид прижима с возможностью измерения силы прижатия
Фигура 20 - Структурная схема системы управления мехатронной системы формирования индивидуального интраоперационного положения пациента.
Фигура 21 - Взаимосвязь конструктивных и электрических элементов мехатронных модулей системы формирования индивидуального интраоперационного положения пациента.
Фигура 22 - Система управления многосекционного модуля.
Фигура 23 - Алгоритм преобразователя интерфейсов.
Фигура 24 - Структурная схема линейного мехатронного устройства
Фигура 25 - Главная часть программного алгоритма, реализованного в устройстве линейных перемещений.
Фигура 26 -Структурная схема системы управления модуля прижатия.
Фигура 27 - Блок схема работы блока преобразователя интерфейсов
Фигура 28 - Структурная схема блока ацп
Фигура 29 - Структурная схема 6-и канальной платы АЦП
Фигура 30 - Алгоритм работы программы платы АЦП.
Фигура 31 - Реализация прототипа модуля прижатия и прототипа многосекционного модуля.
Фигура 32 - Фрагмент процесса проведения эксперимента по работе мехатронного модуля в условиях нагружения.
Фигура 33 - Фрагмент процесса проведения эксперимента по считыванию данных с одноточечных тензометрических датчиков.
Осуществление изобретения
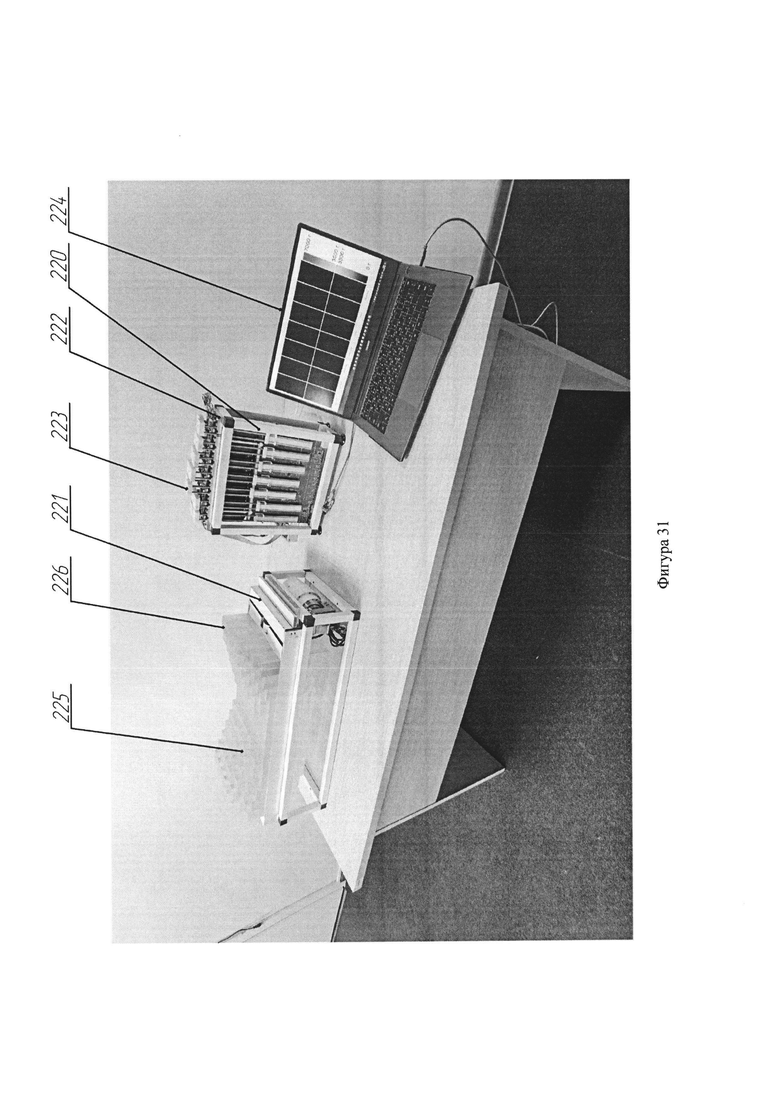
Для подтверждения возможности использования и работоспособности конструктивных особенностей мехатронной системы формирования индивидуального интраоперационного положения пациента была проведена ее имплементация в виде набора стендов многосекционного модуля 220 и модуля прижатия 221. Фотография полученных стендов представлена на фигуре 31.
В качестве стенда многосекционного модуля использовались два мехатронных устройства линейного перемещения 222. Данные устройства были объединены при помощи единой шины данных и управлялись посредством программы, запушенной на управляющем компьютере 224. При помощи программы было осуществлено перемещение линейных мехатронных элементов 223. Значения сил, действующих на контактные площадки четырнадцати линейных мехатронных элементов 223 отражались на экране управляющего компьютера.
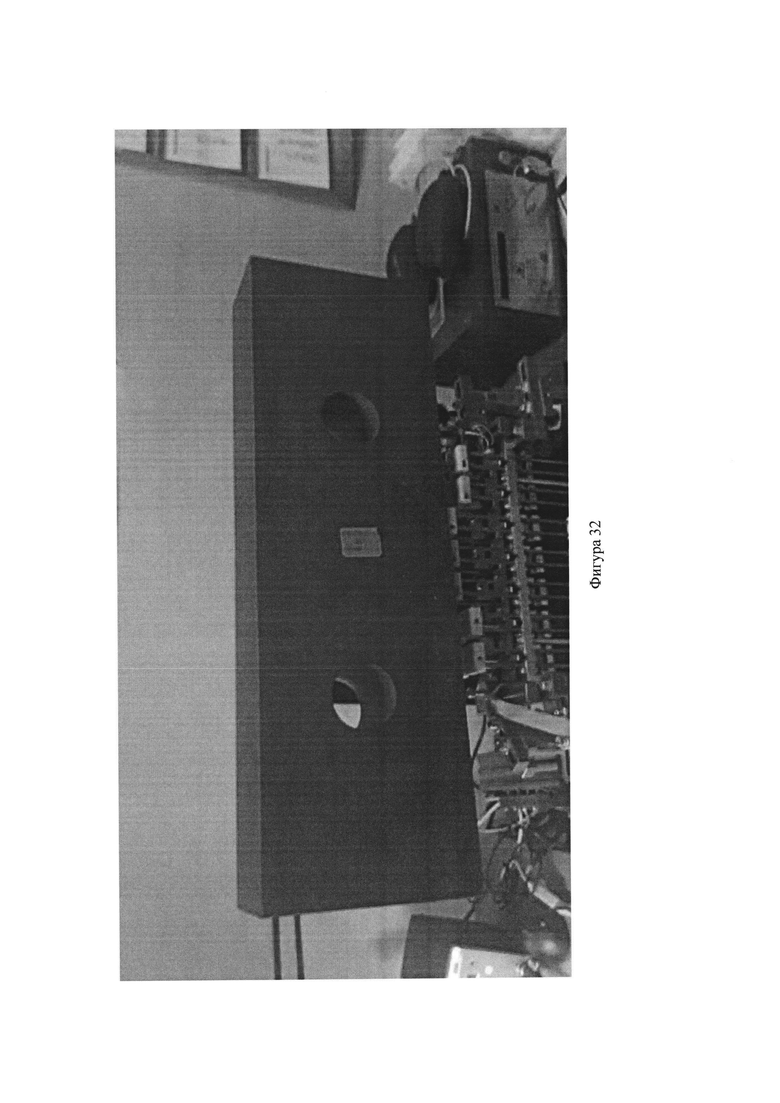
Для подтверждения работоспособности мехатронной системы формирования индивидуального интраоперационного положения пациента при помощи стенда многосекционного модуля был проведен эксперимент по управлению перемещением линейных мехатронных элементов под нагрузкой. На фигуре 32 продемонстрирован процесс подъема фиксированной массы - гранитной плиты весом 37 килограмм при помощи 6 фланцев многосекционного модуля из 14 доступных. Таким образом была подтверждена возможность мехатронного устройства работать при нагрузке на один фланец равной 6 кг.
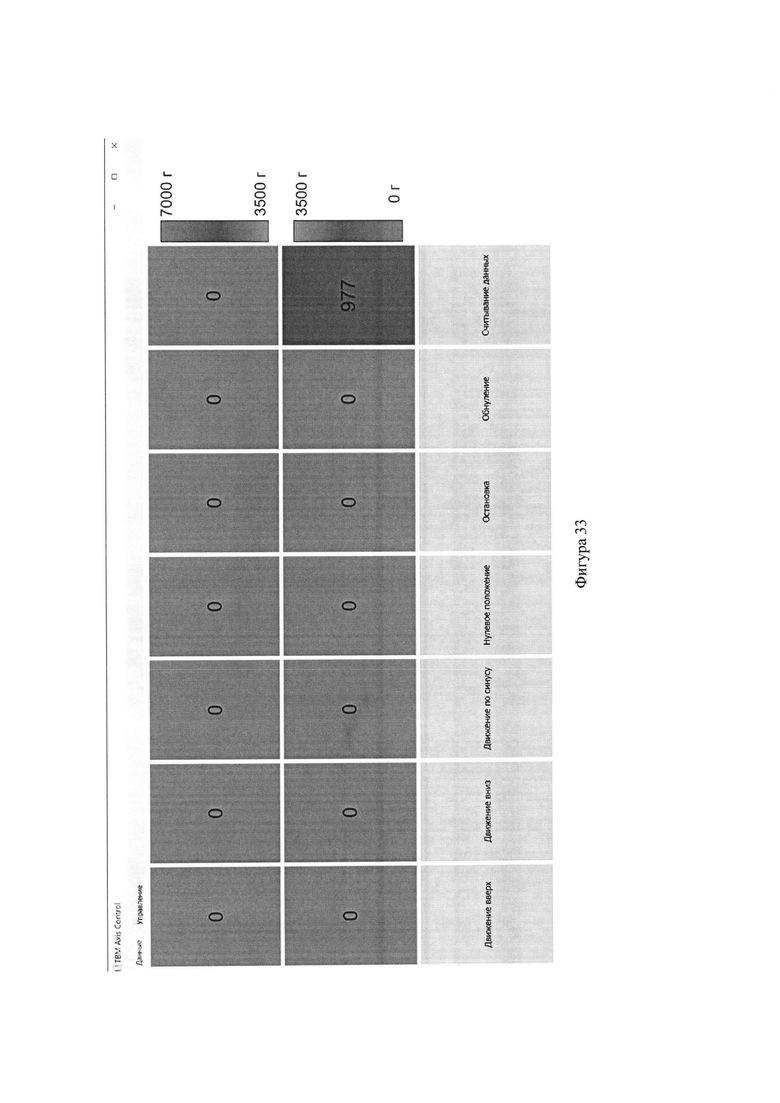
Вторым экспериментом, проведенным при помощи стенда многосекционного модуля, было считывание значений с одноточечных тензометрических датчиков посредством использования оконного приложения. К каждой из подвижностей мехатронного модуля прикладывалась нагрузка в виде эталонной массы в 1 килограмм. Данное значение считывалось модулем и пересчитывалось в граммы. Этап эксперимента с замером значения нагрузки, приложенной к одному из штоков представлены на фигуре 33. На одном из валов двигателей был размещен груз в 1 килограмм. В таблице 1 приведены результаты эксперимента.
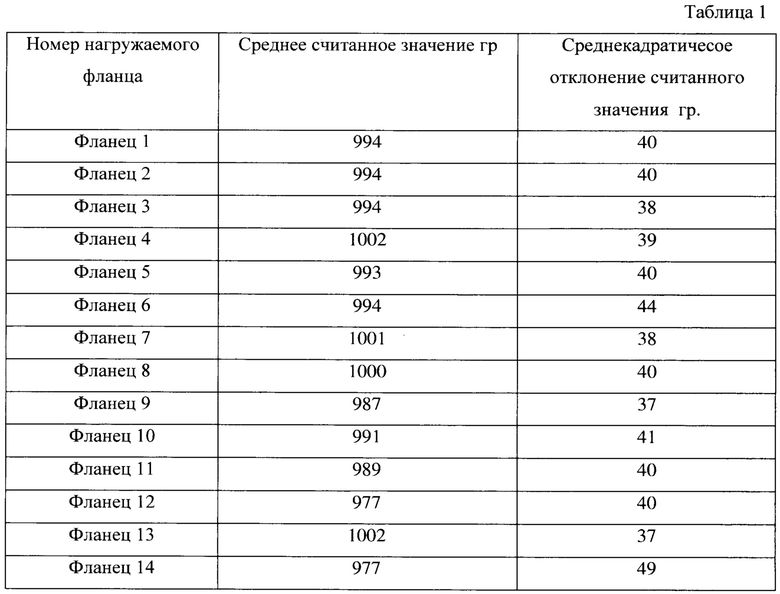
Считанные значения показали среднеквадратическое отклонение измеренной величины, не превышающую 50 гр. Таким образом была подтверждена возможность считывания усилий с одноточечных тензометрических датчиков, входящих в состав мехатронного модуля.
В качестве стенда модуля прижатия использовался один подобный модуль 221, закрепленный на неподвижном основании. Следует отметить, что при проведении стендовых испытания модуля прижатия 221, была сформирована сложная поверхность 225, образованная при помощи рентгенопрозрачных пластин 226 в количестве девяносто восьми штук. По результатам эксперимента было определена требуемая сила прижатия для вертикальной нагрузки создаваемой массой в 100 Кг. Полученное значение силы прижатия оказалось равным 8000 ньютонам. Данные пластины, расположенные на различном расстоянии в вертикальной плоскости, были прижаты модулем и тем самым была осуществлена фиксация их положения для формирования сложной поверхности.
Библиографические данные (список источников)
1. RU 2275894 C1 (дата публикации: 10.05.2006 Бюл. №13)
2. RU 2412680 C2 (дата публикации: 27.02.2011 Бюл. №6)
3. RU 2434623 C2 (дата публикации: 27.11.2011 Бюл. №33)
4. RU 2464004 C2 (дата публикации: 20.10.2012 Бюл. №29)
5. RU 2571805 C2 (дата публикации: 20.12.2015 Бюл. №35)
6. RU 2643127 C2 (дата публикации: 30.01.2018 Бюл. №4)
7. RU 2721991 C2 (дата публикации: 25.05.2020 Бюл. №15)
8. US 5208928 (дата публикации: 11.05.1993)
9. US 6049927 (дата публикации: 18.04.2000)
10. US 7979932 (дата публикации: 19.07.2011)
11. US 8584281 (дата публикации: 19.11.2013), US 20150113733 А1 (дата публикации: 30.04.2015)
12. US 9072646 (дата публикации: 07.07.2015), US 20120144589 A1 (дата публикации: 14.06.2012)
13. US 9265680 (дата публикации: 23.02.2016)
14. US 20140250598 А1 (дата публикации: 11.09.2014)
15. US 10898401 (дата публикации: 26.01.2021), US 10900448 (дата публикации: 26.01.2021)
16. US 20200170868 A1 (дата публикации: 04.06.2020)
17. US 20170135890 A1 (дата публикации: 18.05.2017) (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
| Многофункциональное устройство со сменными хирургическими инструментами для измерения воздействующих на них сил и моментов при проведении нейрохирургических операций | 2019 |
|
RU2736162C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ БЕСПРОВОДНОЕ УСТРОЙСТВО СО СМЕННЫМИ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ ДЛЯ ИЗМЕРЕНИЯ ИХ УГЛОВ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ВОЗДЕЙСТВУЮЩИХ НА НИХ СИЛ И МОМЕНТОВ ПРИ ПРОВЕДЕНИИ НЕЙРОХИРУРГИЧЕСКИХ ОПЕРАЦИЙ | 2022 |
|
RU2807937C1 |
| Комбинированная интраоперационная навигационная система с использованием генерации ультразвуковых изображений методом трассировки лучей | 2022 |
|
RU2816071C1 |
| Роботизированный мультифункциональный лазерный хирургический комплекс | 2018 |
|
RU2693216C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| ТОПОМЕТРИЧЕСКАЯ СИСТЕМА С ФУНКЦИЕЙ ТОМОГРАФИИ | 2006 |
|
RU2325117C2 |
| АКТИВНАЯ КЛАПАННАЯ РЕШЕТКА | 2010 |
|
RU2452661C2 |
| ФРИКЦИОННО-ПОЛИМЕРНЫЙ АМОРТИЗАТОР УДАРА | 2013 |
|
RU2550110C2 |


Группа изобретений относится к медицинской технике. Мехатронная система формирования положения пациента во время проведения хирургической операции выполнена с возможностью использования в качестве столешницы хирургического стола для расположения пациента и включает многосекционный модуль, модуль прижатия и модуль каркас, устанавливаемый на опорных колоннах и при помощи линейных направляющих связанный с многосекционным модулем. Модуль прижатия размещен внутри модуля каркаса. Система управления мехатронной системой формирования положения пациента используется во время проведения хирургической операции. Многосекционный модуль выполнен с возможностью формирования опорной поверхности из отдельных поверхностей, представляющих собой рентгенопрозрачные пластины, за счет последовательного изменения высоты расположения рентгенопрозрачных пластин и включает мехатронные элементы линейного перемещения, связанные рамой и объединенные в одном корпусе. Модуль прижатия выполнен с возможностью фиксации рентгенопрозрачных пластин путем прижатия их с противоположных сторон. Раскрыты многосекционный модуль, модуль прижатия и модуль каркас, используемые в мехатронной системе формирования положения во время проведения хирургической операции. Технический результат состоит в расширении функциональных возможностей хирургического стола. 4 н.п. ф-лы, 33 ил.
1. Мехатронная система формирования положения пациента во время проведения хирургической операции, выполненная с возможностью использования в качестве столешницы хирургического стола для расположения пациента и включающая многосекционный модуль, модуль прижатия и модуль каркас, устанавливаемый на опорных колоннах и при помощи линейных направляющих связанный с многосекционным модулем, отличающаяся тем, что в нее введены модуль прижатия, размещенный внутри модуля каркаса, и система управления мехатронной системой формирования положения пациента во время проведения хирургической операции, при этом многосекционный модуль выполнен с возможностью формирования опорной поверхности из отдельных поверхностей, представляющих собой рентгенопрозрачные пластины, за счет последовательного изменения высоты расположения рентгенопрозрачных пластин и включает мехатронные элементы линейного перемещения, связанные рамой и объединенные в одном корпусе, а модуль прижатия выполнен с возможностью фиксации рентгенопрозрачных пластин путем прижатия их с противоположных сторон.
2. Многосекционный модуль, используемый в мехатронной системе формирования положения пациента во время проведения хирургической операции и выполненный с возможностью формирования опорной поверхности из отдельных поверхностей, отличающийся тем, что включает мехатронное устройство линейного перемещения, систему управления многосекционного модуля и раму, при этом мехатронное устройство линейного перемещения содержит линейные мехатронные элементы и выполнено с возможностью линейного перемещения упругих упоров с корректировкой обратной связью по положению, рама связывает линейные мехатронные элементы мехатронного устройства линейного перемещения в одном корпусе, а отдельные поверхности представляют собой рентгенопрозрачные пластины прямоугольной формы.
3. Модуль прижатия, используемый в мехатронной системе формирования положения пациента во время проведения хирургической операции, для фиксации рентгенопрозрачных пластин путем прижатия с противоположных сторон, включающий рентгенопрозрачные пластины прямоугольной формы, составляющие опорную поверхность, узлы перемещения клина, систему управления модуля прижатия, управляющую перемещением и фиксацией узлов перемещения клина и прижимы, при этом клиновое соединение имеет возможность передачи усилия с умножающим коэффициентом на прижим, а прижим снабжен датчиком измерения усилия для определения усилия, с которым осуществляется прижатие.
4. Модуль каркас, используемый в мехатронной системе формирования положения во время проведения хирургической операции, для перемещения многосекционного модуля при помощи узла перемещения многосекционного модуля, выполненный с возможностью линейного перемещения рамы многосекционного модуля по линейным направляющим, устанавливаемый на опорные колонны и при помощи линейных направляющих связанный с многосекционным модулем, отличающийся тем, что линейные направляющие установлены на стенках модуля каркаса, а рама размещена при помощи двух шариково-винтовых передач, при этом модуль каркас включает систему управления модуля каркаса с устройством измерения веса, представляющим собой три вертикально ориентированных датчика усилия для измерения распределения силы, с которой пациент воздействует на отдельные части хирургического стола, и сил, воздействующих на пациента во время вкручивания транспедикулярных винтов.
| US 20170135890 A1, 18.05.2017 | |||
| US 20200170868 A1, 04.06.2020 | |||
| US 8584281 B2, 19.11.2013 | |||
| US 9072646 B2, 07.07.2015 | |||
| US 9265680 B2, 23.02.2016 | |||
| US 10898401 B2, 26.01.2021 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОПЕРАЦИОННОГО СТОЛА | 2006 |
|
RU2412680C2 |
| ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПАЦИЕНТА С ТРАНСЛЯТОРОМ ПЕРЕМЕЩЕНИЯ ТУЛОВИЩА ПАЦИЕНТА | 2011 |
|
RU2571805C9 |
| ОПЕРАЦИОННЫЙ СТОЛ И СПОСОБ УПРАВЛЕНИЯ ОПЕРАЦИОННЫМ СТОЛОМ | 2014 |
|
RU2643127C2 |
