Область техники, к которой относится изобретение
Данное изобретение относится к транспортным средствам, в которых переключатель или замок зажигания расположен за рулевым колесом, которое может ухудшать видимость места нахождения замка зажигания. В частности, изобретение относится к способу автоматического поворота рулевого колеса в положение, в котором лучше видимость места нахождения замка зажигания через рулевое колесо, когда водитель находится в нормальном положении на сиденье.
Уровень техники
Рулевое колесо представляет собой тип устройства для рулевого управления транспортным средством, которое водитель поворачивает для обеспечения рулевого управления транспортным средством. Проще говоря, путем вращения рулевого колеса влево или вправо транспортное средство можно поворачивать влево или вправо соответственно. Рулевые колеса, как правило, имеют круглую форму и имеют внешнее кольцо, которое водитель может удерживать рукой, соединенное с центральной ступицей с помощью одной или нескольких спиц. Ступица рулевого колеса может быть соединена с валом рулевого колеса, который проходит вниз в рулевую колонку и далее под приборную панель или за нее. В автомобилях вал рулевого колеса, как правило, соединен с колесами с помощью системы рулевого управления. Система рулевого управления может включать в себя редуктор для передачи движения и энергии от одного устройства к другому. Редуктор может быть также использован для увеличения крутящего момента, позволяя рулевому колесу делать несколько оборотов при повороте колес лишь на часть оборота.
Для обеспечения прямой механической связи между рулевым колесом и управляемыми колесами транспортного средства, как правило, используют реечный редуктор и винтовой редуктор с циркулирующими шариками. Однако были разработаны системы управления с помощью электроники (steer-by-wire), которые не требуют непосредственного механического контакта. Электронные системы рулевого управления измеряют вращательное усилие рулевого колеса и с помощью приводов поворачивают управляемые колеса транспортного средства. Электронные системы рулевого управления могут работать совместно с редуктором или могут полностью заменять редуктор и использовать приводы для создания крутящего момента, необходимого для поворота колес транспортного средства. Большинство современных систем рулевого управления, будь то традиционная или электронная система рулевого управления, как правило, используют приводы для обеспечения управления с усилением, способствующего повороту колес при условии приложения меньшего усилия на рулевое колесо.
Кроме применения в функции рулевого управления, рулевое колесо может служить местом расположения многочисленных других органов управления транспортным средством. В течение долгого времени рулевое колесо используют в качестве места для размещения кнопки подачи звукового сигнала транспортного средства. Современные транспортные средства могут также иметь на рулевом колесе другие встроенные органы управления, например, управления круиз-контролем, аудиосистемой и телефоном, а также клавиши для ручного переключения передач в АКПП, для уменьшения необходимости отпускать рулевое колесо (и отрывать глаза от дороги) во время вождения. Ступицу рулевого колеса, как правило, также применяют в качестве места размещения воздушной водительской подушки безопасности. Добавление воздушной подушки безопасности, клавиш, переключателей и других органов управления снижает обзор других элементов транспортного средства, расположенных за рулевым колесом или под ним.
На некоторых транспортных средствах для запуска двигателя применяют переключатель или замок зажигания. Переключатель зажигания может представлять собой кнопку, которую водитель нажимает для запуска транспортного средства. Замок зажигания может быть использован вместе с ключом, при этом для запуска транспортного средства необходимо вставить ключ в замок зажигания. Переключатели и замки зажигания могут быть расположены на рулевой колонке или на приборной панели рядом с основанием рулевой колонки. Рулевое колесо может затруднять для водителя обзор места размещения переключателя или замка зажигания. В случае с замком зажигания затрудненная видимость может осложнять для водителя процесс вставки ключа. Такая проблема ухудшения обзора может быть также осложнена в случае с прямоугольными волнообразными ключами, которые не имеют стандартного конца, который упрощает выравнивание ключа относительно отверстия замка зажигания. На некоторых транспортных средствах применяют внутреннее освещение для подсвечивания замка рулевой колонки с целью улучшения его обзора, однако, если водитель должен наклоняться вперед, чтобы оглядеть рулевое колесо для определения места размещения замка зажигания, то часто голова водителя может закрывать внутреннее освещение, снижая его эффективность. Кроме того, на некоторых транспортных средствах с правосторонним управлением водителю приходится открывать дверь со стороны водителя, чтобы обеспечить достаточное место для своей головы при наклоне вперед с целью поиска места замка зажигания.
Раскрытие изобретения
В соответствии с одним аспектом изобретения представлена система для улучшения обзора места нахождения замка или переключателя зажигания в транспортном средстве. Данная система имеет привод, способный поворачивать рулевое колесо, и индикатор для обеспечения индикации нахождения транспортного средства на стоянке. Система также включает в себя контроллер для оценки индикации о нахождении транспортного средства на стоянке и для обмена данными с приводом. Контроллер запрограммирован на поворот рулевого колеса в положение, которое обеспечивает по крайней мере частичную видимость места нахождения зажигания на основании, по крайней мере, того, что транспортное средство находится в припаркованном состоянии. Индикация о нахождении транспортного средства в припаркованном состоянии может быть выполнена при переводе автоматической коробки передач в положение «стоянка», при задействовании стояночного тормоза, при завершении автоматической парковки или во время дистанционного запуска. Вращение рулевого колеса может быть выполнено при включенном или отключенном двигателе. Вращение рулевого колеса может быть выполнено при включенном двигателе во избежание потребления энергии аккумулятора во время поворота при выключенном зажигании.
В соответствии с другим аспектом изобретения предложена система для улучшения обзора места нахождения переключателя или замка зажигания в припаркованном транспортном средстве. Данная система включает в себя контроллер, который сообщается с датчиком угла поворота рулевого колеса, предназначенного для индикации положения рулевого колеса. В данной системе контроллер также имеет заранее заданную карту положений рулевого колеса в соответствии с уровнями видимости места нахождения замка зажигания. Контроллер запрограммирован на поворот рулевого колеса в положение с большим уровнем видимости зажигания, когда рулевое колесо находится в положении с меньшим уровнем видимости зажигания.
В соответствии с еще одним аспектом изобретения предложен способ для улучшения обзора места нахождения зажигания в транспортном средстве. Способ включает в себя вращение рулевого колеса в конечное положение, которое обеспечивает по крайней мере частичную видимость места нахождения зажигания, если в первоначальном положении рулевое колесо по существу препятствует обзору водителем места нахождения зажигания, и когда транспортное средство находится в припаркованном состоянии. Способ предполагает идентификацию припаркованного состояния, в том числе по положению «стоянка» автоматической коробки передач, по задействованному стояночному тормозу, по факту завершения автоматической парковки, по отключенному или включенному двигателю или во время дистанционного запуска.
Краткое описание чертежей
Вышеуказанные и другие аспекты изобретения более подробно изложены ниже со ссылкой на сопроводительные чертежи.
Фиг.1 представляет собой схематический вид системы для улучшения обзора места нахождения зажигания в транспортном средстве.
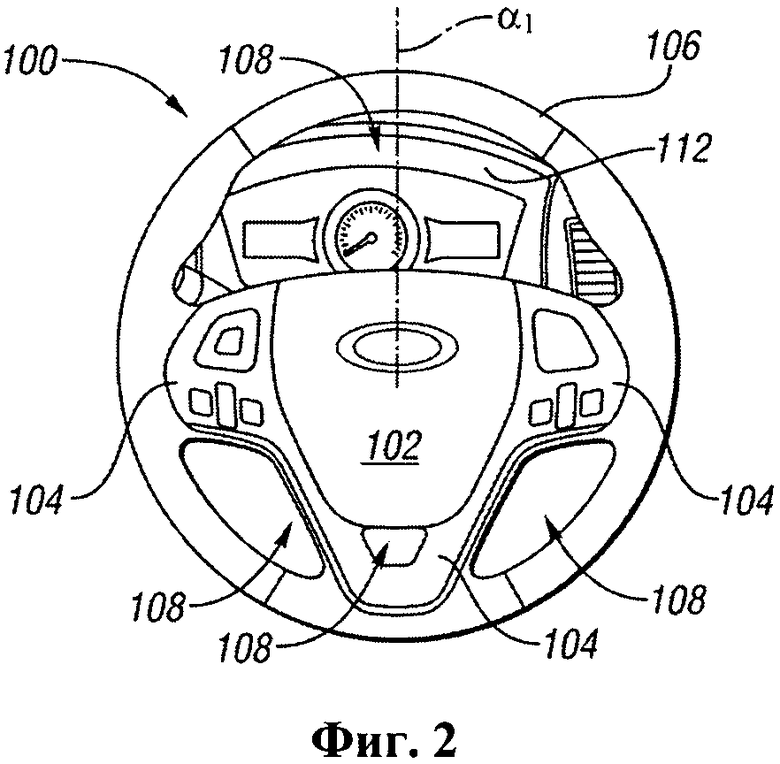
Фиг.2 представляет собой вид со стороны водителя места нахождения зажигания, когда рулевое колесо находится в центральном положении.
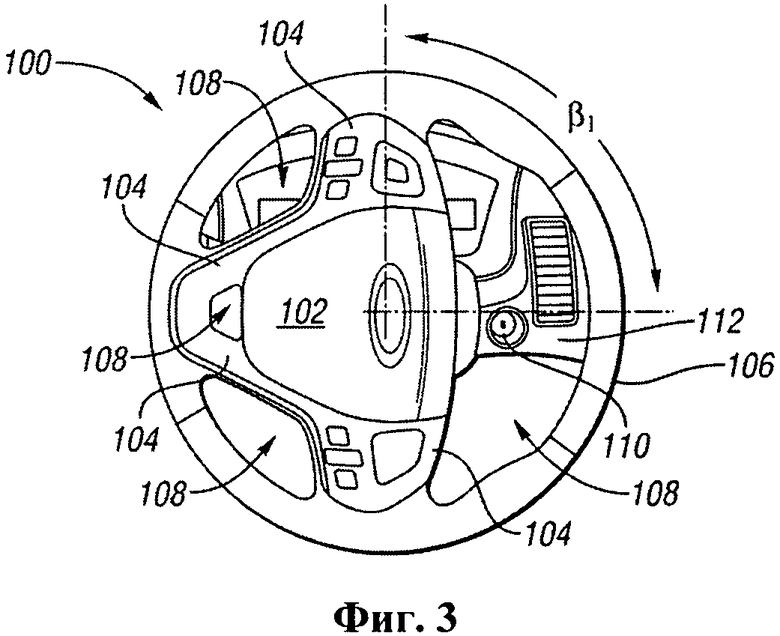
Фиг.3 представляет собой вид со стороны водителя в той же проекции, что и в примере с Фиг.2, когда рулевое колесо повернуто в положение, обеспечивающее по крайней мере частичный обзор места нахождения зажигания на приборной панели.
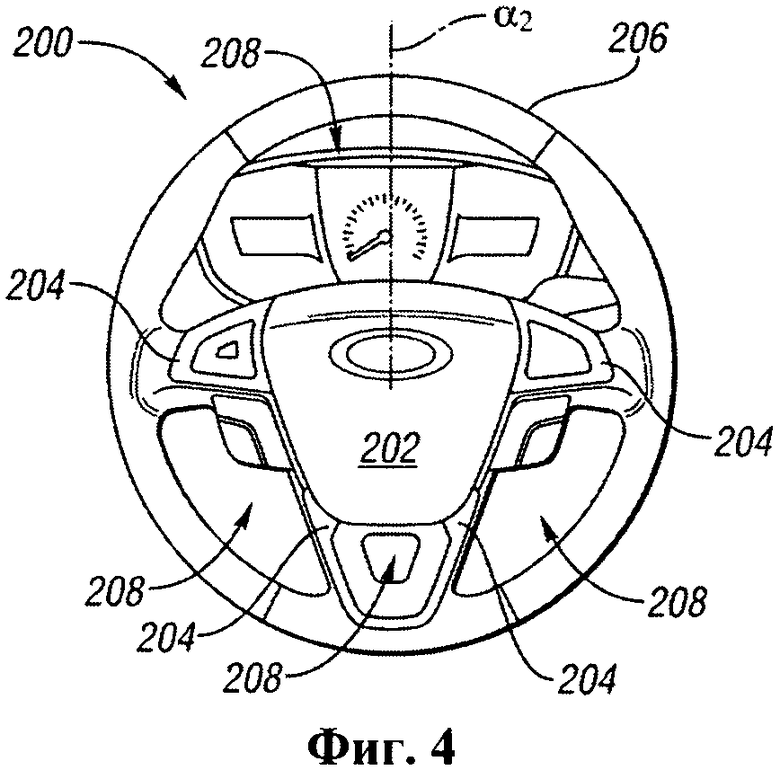
Фиг.4 представляет собой другой вид со стороны водителя места нахождения зажигания, когда рулевое колесо находится в центральном положении.
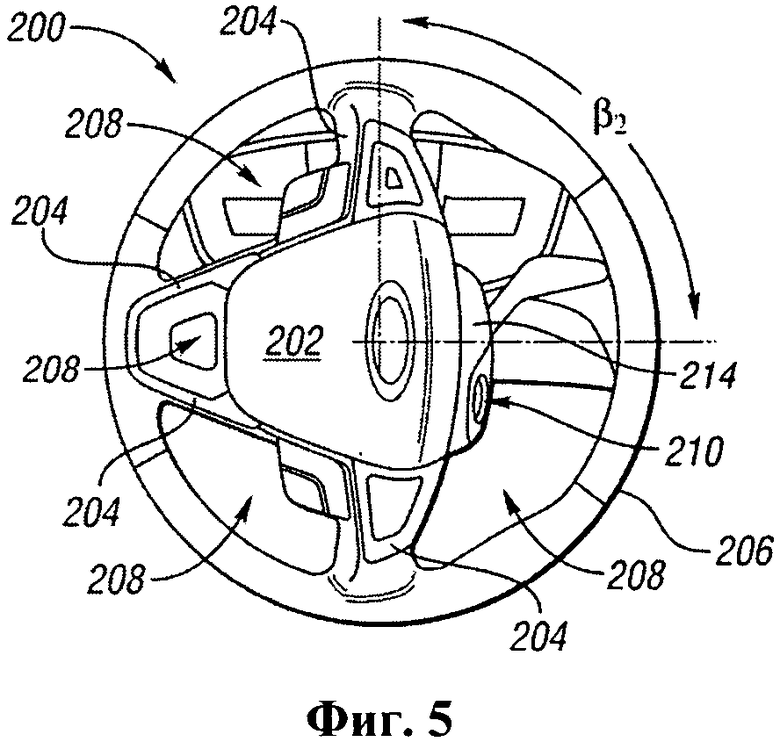
Фиг.5 представляет собой вид со стороны водителя в той же проекции, что и в примере с Фиг.4, когда рулевое колесо повернуто в положение, обеспечивающее по крайней мере частичный обзор места нахождения зажигания на рулевой колонке.
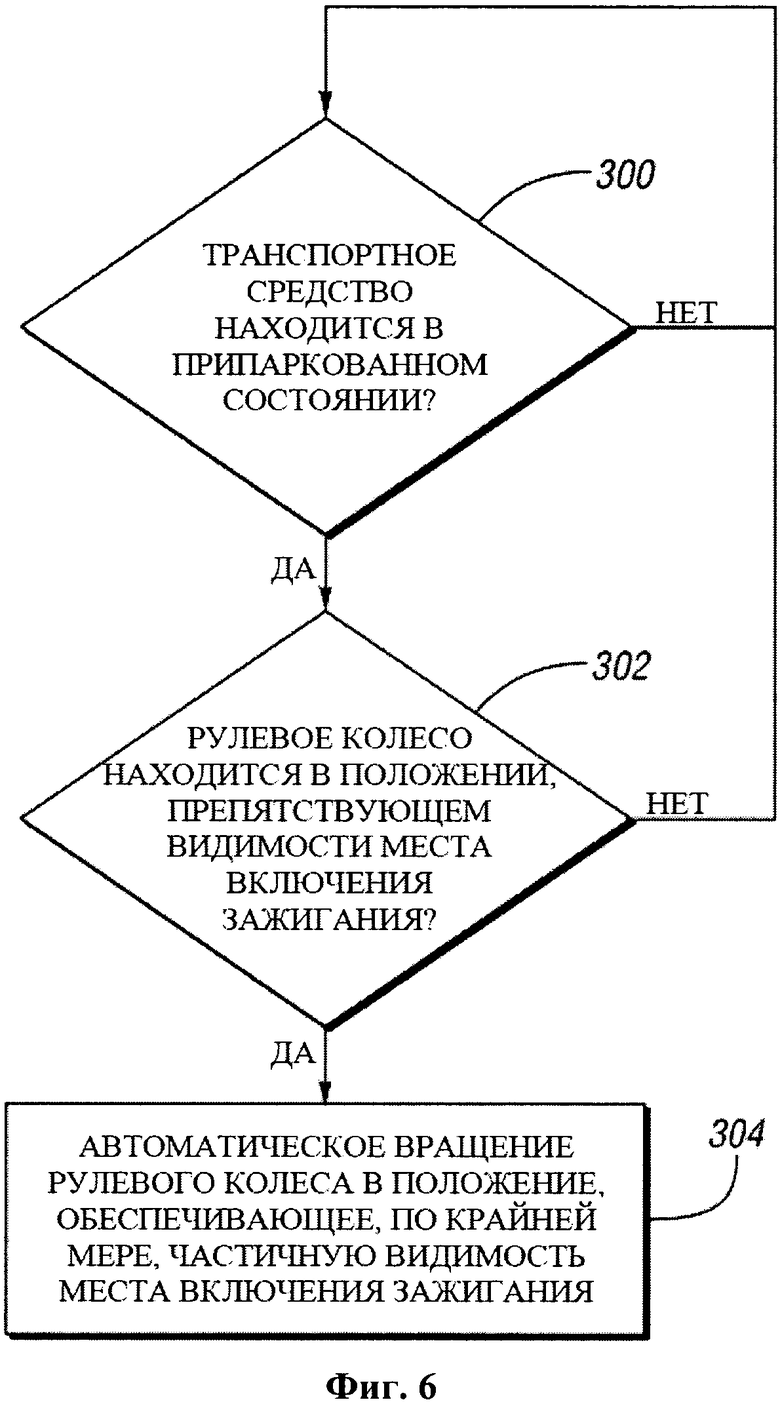
Фиг.6 представляет собой блок-схему способа для улучшения обзора места нахождения зажигания в транспортном средстве.
Осуществление изобретения
Далее представлено подробное описание вариантов осуществления изобретения. Описанные варианты приведены исключительно в качестве примеров, которые могут быть воплощены в различных формах. Фигуры необязательно выполнены в масштабе. Некоторые отличительные особенности могут быть увеличены или уменьшены с целью изображения деталей конкретных элементов. Конкретные конструкционные и функциональные особенности, изложенные в данном описании, не должны рассматриваться как ограничение и приведены лишь в качестве иллюстрации для ознакомления специалистов в данной области техники с вариантами реализации изобретения.
На Фиг.1 изображено транспортное средство 10 с колесом 12, которое контактирует с поверхностью или землей и катится по ней, также называемое ходовым колесом. Колесо 12 обеспечивает опору для транспортного средства и позволяет транспортному средству 10 перемещаться по земле. Колесо 12 также может поворачиваться и использоваться для управления транспортным средством 10. Транспортное средство 10 может представлять собой автомобильное транспортное средство, а колесо 12 может представлять собой колесо с шиной. В данном примере, когда колесо 12 катится по земле, оно может быть повернуто, в результате чего транспортное средство 10 будет перемещаться в том направлении, в котором повернуто колесо 12. В качестве варианта колесо 12 может поворачиваться в любом направлении, представляя собой элемент, участвующий в управлении транспортным средством. Примерами других элементов, участвующих в управлении транспортным средством, являются лыжи, колесные пары с гусеницами, рули поворота и элероны. Рулевое колесо 14 может быть соединено, напрямую или косвенно, с элементом, определяющим направление, при этом для перемещения этого элемента рулевое колесо 14 поворачивается, способствуя управлению транспортным средством 10.
Вращательное усилие, показанное стрелкой 16, может быть приложено к рулевому колесу 14, что приведет к повороту колеса 12, как показано стрелкой 18. Рулевое колесо 14 может быть соединено с колесом 12 с помощью системы 20 рулевого управления. Система 20 рулевого управления может включать в себя редуктор 22. Редуктор 22, показанный на Фиг.1, представляет собой реечный редуктор, хотя могут быть использованы и другие редуктора. Редуктор 22 может быть использован для преобразования вращательного перемещения рулевого колеса 14 в поперечное перемещение относительно транспортного средства 10 и для увеличения крутящего момента от усилия, прилагаемого к рулевому колесу 14, до результирующего перемещения 18. Рулевое колесо 14 может быть соединено с редуктором 22 с помощью вала 24 рулевого колеса таким образом, что вращательное перемещение 16 рулевого колеса 14 может быть подано в редуктор 22 через вал 24 рулевого колеса.
В случае с реечным редуктором шестерня может быть расположена рядом с концом вала 24 рулевого колеса, а ее зубцы входят в зацепление с рейкой (не показана), и при вращении шестерни в ее поперечное зафиксированное положение, рейка может быть перемещена назад и вперед относительно транспортного средства 10. Колесо 12 может быть установлено на поворотном кулаке 26 с помощью ступицы или подшипника в сборе (не показан) и может вращаться на подшипнике относительно поворотного кулака 26. Поперечная тяга 28 может быть установлена между рейкой редуктора 22 и поворотным кулаком 26 для передачи поперечного движения рейки на поворотный кулак 26. Поперечная тяга 28 может быть соединена с поворотным кулаком 26 и смещена от по существу вертикальной поворотной точки 30 поворотного кулака 26, создавая поворотное движение поворотного кулака 26 вокруг точки 30 при поперечном движении поперечной тяги 28. Поворотное движение поворотного кулака 26 создает результирующее поворотное движение, обозначенное стрелкой 18.
Система 20 рулевого управления может представлять собой систему управления с усилением. Системы рулевого управления с усилением обеспечивают дополнительный вклад в поворот или перемещение элементов системы рулевого управления таким образом, что при повороте рулевого колеса 14 может быть задействован привод, который будет способствовать повороту или перемещению элементов системы управления. Системы управления с усилением требуют меньшего вращательного усилия 16 для создания результирующего поворотного движения 18 и поворота колеса 12. Это является особенно эффективным, когда транспортное средство не движется. Привод усилителя может представлять собой любой известный привод, например, насосы гидроусилителя и электродвигатели. Двигатель 32 усилителя для реечного редуктора может быть соединен с рейкой редуктора 22 таким образом, чтобы при подаче питания на двигатель 32 он усиливал перемещение рейки. Двигатель 34 усилителя для вала рулевого колеса может быть соединен с валом 24 рулевого колеса таким образом, чтобы при подаче питания на двигатель 34 он усиливал перемещение вала 24 рулевого колеса.
Вал 24 рулевого колеса может соединять рулевое колесо 14 и редуктор 22 непосредственно, или транспортное средство 10 может иметь промежуточную электронную систему 36 управления, в которой вращательное усилие 16 необязательно создает непосредственную механическую связь с результирующим поворотом 18 колеса 12 на выходе. В электронной системе 36 управления может быть измерено вращательное усилие 16 рулевого колеса 14, и система подает электропитание на приводы, например, двигатели 32, 34 с целью перемещения элементов системы 20 рулевого управления для поворота колеса 12. Для измерения угла поворота рулевого колеса 14 может быть использован датчик 38 углового перемещения рулевого колеса. Электронная система 36 управления позволяет рулевому колесу 14 быть вращательно отсоединенным от системы 20 рулевого управления. Электронные системы 36 управления могут подавать водителю сигналы обратной связи о крутящем моменте путем активного поворота рулевого колеса 14 при перемещении колеса 12, таким образом чтобы рулевое колесо 14 и колесо 12 поворачивались с постоянным коэффициентом усиления, таким же, как и в случае стандартной системы рулевого управления с непосредственной механической связью. Электронные системы 36 управления могут также изменять коэффициент усиления для различных градусов поворота колеса 12, при различной скорости движения транспортного средства или по выбору водителя. Аналогично электронным системам 36 управления, транспортное средство может быть также оборудовано системой активного переднего рулевого управления, в которой колесо 12 может быть автоматически повернуто без вращения рулевого колеса 14.
Электронные системы 36 управления могут также иметь резервную механическую связь, например, муфту 40, которая обеспечивает непосредственную механическую связь рулевого колеса 14 с системой 20 рулевого управления. Муфта 40 может представлять собой обычно замкнутую муфту сцепления, которая размыкается при подаче питания и автоматически замыкается, обеспечивая непосредственное сцепление рулевого колеса 14 с системой 20 рулевого управления, в случае потери электропитания. На Фиг.1 муфта 40 показана в середине вала 24 рулевого колеса, однако электронная система 36 управления может иметь другие места расположения и конфигурации расцепления. Когда муфта 40 расположена на валу 24 рулевого колеса, привод 42 рулевого колеса может быть соединен с рулевым колесом 14, чтобы вращать рулевое колесо 14 одновременно с движением системы 20 рулевого управления или отдельно от такого движения. Когда муфта 40 находится в зацеплении, или если в транспортном средстве 10 не установлена электронная система рулевого управления и рулевое колесо 14 имеет непосредственную механическую связь с перемещением элементов системы 20 рулевого управления, для вращения рулевого колеса 14 может быть использован привод 32, 34.
Вал 24 рулевого колеса может быть, по крайней мере частично, расположен в рулевой колонке 44. Рулевое колесо 14 может также включать в себя замок 46 блокировки рулевой колонки. Замок 46 блокировки рулевой колонки может быть использован для блокировки рулевого колеса 14 таким образом, чтобы оно не могло вращаться, и колесо 12 не могло поворачиваться. Замок 46 блокировки рулевой колонки представляет собой устройство обеспечения безопасности и противоугонное устройство, предназначенное для предотвращения вращения рулевого колеса 14 и колеса 12, когда транспортное средство 10 выключено или припарковано, или ключ был извлечен из замка зажигания. Замок 46 блокировки рулевой колонки может быть механическим, и может быть задействован при извлечении ключа зажигания путем вращения рулевого колеса 14 в определенные положения, в которых шпилька установлена в фиксатор для блокирования вращения рулевого колеса 14. В качестве альтернативы замок 46 блокировки рулевой колонки может представлять собой шпильку с электроприводом, и активироваться, когда кнопка переключателя зажигания отжата в выключенное положение, либо может быть использовано сочетание данных способов блокировки.
На Фиг.1 показано, что зажигание 48 расположено на рулевой колонке 44, однако оно может быть расположено и в других местах в транспортном средстве. Альтернативным местом расположения зажигания является приборная панель или приборный щиток (см. Фиг.3). Зажигание 48 используют для запуска транспортного средства. Зажиганием 48 может быть замок зажигания, в который должен быть вставлен ключ для выполнения запуска транспортного средства 10, или кнопка, переключатель или тактильный датчик, который следует нажать для запуска транспортного средства 10. В случае, когда зажигание 48 расположено за рулевым колесом 14, или когда между местом нахождения замка зажигания и линией обзора водителя может находиться рулевое колесо 14, оно может препятствовать обнаружению места нахождения зажигания 48.
На Фиг.1 показано транспортное средство 10, которое имеет контроллер 52, сообщающийся с по крайней мере одним приводом 32, 34, 42. Линия связи между приводами 32, 34, 42 и контроллером 52 может быть проводной, как показано, или беспроводной. Контроллер 52 запрограммирован на вращение рулевого колеса 14 в положение, которое обеспечивает по крайней мере частичную видимость зажигания 48 (см. Фиг.3 и 5). Контроллер запрограммирован на вращение рулевого колеса 14 на основании, по крайней мере, того, что транспортное средство 10 находится в припаркованном состоянии. Для индикации о том, что транспортное средство 10 находится в припаркованном состоянии, может быть использован индикатор, например, как обозначено стрелками 54а и 54b. Контроллер 52 может представлять собой независимый модуль или быть встроенным в другие модули в салоне или отсеке двигателя или в ступицу рулевого колеса.
Индикатор 54а представляет собой сигнал о том, что автоматическая коробка передач (не показана) приведена в положение стоянки. Нахождение автоматической коробки передач в положении стоянки может быть обнаружено, когда рычаг 56 переключения передач или кнопка (в случае переключения с помощью электрического переключателя передач) находится в положении стоянки. В качестве индикатора 54а может быть использован датчик (не показан), а контроллер может иметь непосредственный доступ к датчику или может иметь доступ к данным, которые датчик передает через внутреннюю коммуникационную сеть (не показана). Другим индикатором может быть индикатор 54b включения стояночного тормоза 58. Аналогично положению рычага 56 переключения передач, для определения того, задействован ли стояночный тормоз 58, может быть использован датчик (не показан). Несмотря на то что на Фиг.1 стояночный тормоз 58 показан в виде ножной педали, могут быть использованы и другие стояночные тормоза, примерами которых являются рукоятка стояночного тормоза или электронный выключатель. Сигналы о том, что транспортное средство припарковано, могут быть отправлены на контроллер 52, или контроллер 52 может осуществлять запрос данных напрямую или косвенно от индикаторов 54а, 54b.
Индикатором о том, что транспортное средство 10 находится в припаркованном состоянии, может также быть завершение автоматической парковки. Автоматическая парковка представляет собой функцию, которая позволяет системе автоматически выполнить параллельную или перпендикулярную парковку транспортного средства 10. Во время выполнения автоматической парковки в транспортном средстве при необходимости могут быть задействованы приводы 32, 34 системы рулевого управления для поворота колеса 12, чтобы выполнить автоматическую парковку транспортного средства 10. При завершении автоматической парковки транспортное средство находится в припаркованном состоянии, и контроллер 52 может повернуть рулевое колесо 14 в положение, способствующее лучшему обзору места нахождения зажигания. Одним преимуществом вращения рулевого колеса 14 в положение, способствующее лучшему обзору места нахождения зажигания при завершении автоматической парковки, является то, что пользователи транспортного средства уже готовы к автоматическому вращению рулевого колеса 14 во время автоматической парковки. Другим преимуществом является то, что в транспортном средстве 10 с двигателем во время автоматической парковки двигатель может быть включен, обеспечивая энергию, необходимую для работы приводов, без нагрузки на аккумулятор.
Индикатором о том, что транспортное средство 10 находится в припаркованном состоянии, может быть также дистанционный запуск. Дистанционный запуск происходит при отправке водителем сигнала к запуску транспортного средства 10 снаружи транспортного средства. Преимуществом вращения рулевого колеса 14 в положение, способствующее лучшему обзору места нахождения зажигания во время дистанционного запуска, является то, что в транспортном средстве 10 в этот момент отсутствуют пассажиры. Другим преимуществом, аналогичным преимуществу при автоматической парковке, является то, что в транспортном средстве 10 с двигателем во время дистанционного запуска двигатель будет включен, обеспечивая энергию, необходимую для работы приводов, без нагрузки на аккумулятор. Аналогичным образом на электрических транспортных средствах, которые обеспечивают дистанционное кондиционирование салона в момент, когда транспортное средство все еще подключено к линии зарядки до эксплуатации транспортного средства, рулевое колесо может быть повернуто в положение, обеспечивающее лучший обзор места нахождения зажигания, при питании переменным током, таким образом, нагрузка на 12 В аккумулятор или аккумулятор электрического транспортного средства снижена.
Контроллер 52 может быть также запрограммирован на вращение рулевого колеса 14 на основании, по крайней мере, второго индикатора. Второй индикатор может представлять собой индикатор действия, выбранного из группы событий, включающей в себя: извлечение ключа 60 из замка зажигания 48; пристегивание/отстегивание ремня безопасности со стороны водителя, о чем предоставлена индикация датчиком 62 защелки ремня безопасности; обнаружение присутствия водителя на водительском сиденье 64 или выход водителя из транспортного средства, о чем предоставлена индикация датчиком 66 веса сиденья; открывание/закрывание водительской двери 68, о чем предоставлена индикация датчиком 70 положения двери, или сочетание вышеуказанного. Контроллер 52 может быть также запрограммирован на установление последовательности появления вторых индикаторов, указывающих на то, что водитель покинул транспортное средство: например, сначала срабатывание датчика 70 положения двери, указывающее на открывание двери 68, затем срабатывание датчика 66 веса сиденья, указывающего на отсутствие веса на сиденье 64, далее срабатывание датчика 70 положения двери, указывающего на закрывание двери 68. Другие вторые индикаторы могут быть выбраны из группы, включающей в себя: нажатие кнопки 74 блокировки или кнопки 76 разблокировки брелока 72 для ключей, нажатие кнопки 78 дистанционного запуска брелока 72 для ключей, подачу команды водителем о блокировке/разблокировке с помощью кнопочной панели 80 путем набора определенной комбинации на кнопочной панели 80, команду о дистанционной разблокировке транспортного средства, отправленную посредством сотовой сети связи, или другую команду о дистанционной разблокировке транспортного средства, подаваемую без участия брелока для ключей, команду о дистанционном запуске транспортного средства, подаваемую посредством сотовой сети связи, или другую команду о дистанционном запуске транспортного средства, например, запуск двигателя на основании значений времени, температуры или напряжения, или сочетание этих и ранее указанных вторых индикаторов.
Контроллер 52 может быть также запрограммирован на запрещение вращения рулевого колеса 14 на основании, по крайней мере, третьего индикатора. Третий индикатор может представлять собой условие, выбранное из группы условий, включающей в себя: транспортное средство, припаркованное под углом, превышающим пороговое значение; крутящий момент рулевого колеса 14, превышающий пороговое значение; крутящий момент колеса 12, превышающий пороговое значение; уровень заряда аккумулятора ниже порогового уровня; уровень напряжения аккумулятора, слишком высокий для безопасной подачи питания на привод 32, 34, 42; нахождение транспортного средства 10 на предприятии перед доставкой; или код неисправности модуля, отображаемый для одного из элементов системы.
Датчики, которые могут быть использованы для измерения и индикации угла расположения транспортного средства, представляют собой датчик продольного крена, датчик наклона или гиродатчик. В случае если транспортное средство 10 припарковано на склоне, угол которого больше порогового значения, то колеса могут быть повернуты к бордюру, или повернуты таким образом, чтобы транспортное средство не могло скатиться вниз по склону. В данном случае система может быть запрограммирована на блокировку перемещения колеса, чтобы не влиять на параметры безопасности транспортного средства. Превышение порогового значения крутящего момента рулевого колеса 14 может указывать на то, что водитель удерживает рулевое колесо 14, или на то, что на рулевом колесе 14 установлено противоугонное устройство, в этом случае вращение рулевого колеса 14 может быть нежелательным. Превышение порогового значения крутящего момента колеса 12 может указывать на то, что колесо 12 используют для перемещения транспортного средства, или другое обстоятельство, когда колесо 12 не может быть повернуто, в этом случае попытка вращения колеса 12 может чрезмерно нагрузить привод 32, 34, 42 и/или элементы системы 20 рулевого управления.
Если уровень заряда аккумулятора ниже порогового уровня, это может указывать на то, что при данном уровне заряда аккумулятора последующий запуск транспортного средства 10 может быть затруднен, в связи с чем предпочтительно не задействовать данную систему и дополнительно не расходовать заряд аккумулятора транспортного средства 10. Уровень напряжения аккумулятора, превышающий значение для безопасной подачи питания на привод 32, 34, 42, может иметь место, при заряде аккумулятора 12 В под напряжением 16 В или во время скачка напряжения до 24 В при запуске. Режим нахождения на предприятии до доставки может быть представлять собой помещение транспортного средства 10 в режим, предназначенный минимизации энергопотребления до тех пор, пока транспортное средство 10 не будет продано.
Контроллер 52 может быть также запрограммирован на вращение рулевого колеса на максимальное расстояние, чтобы по крайней мере одно колесо 12 на транспортном средстве было повернуто максимально на 10 градусов. Рулевое колесо 14 может быть уставлено в любом угловом положении относительно центрального положения, равного 0 градусов, до возвращения в центральное положение оборотом на 360 градусов. Вне зависимости от того, в каком положении рулевое колесо 14 было оставлено до запуска автоматического позиционирования рулевого колеса 14 с целью обеспечения частичной видимости зажигания 48, последнее положение рулевого колеса 14 может быть названо начальным угловым положением. Для предоставления контроллеру 52 данных о начальном угловом положении может быть использован датчик 38 углового перемещения рулевого колеса.
Контроллер 52 может иметь заранее заданное запрограммированное угловое положение рулевого колеса, которое обеспечивает, по крайней мере, частичный обзор зажигания 48. Контроллер 52 может быть запрограммирован на вращение рулевого колеса 14 из начального углового положения в заранее заданное угловое положение. Контроллер 52 может быть также запрограммирован на вращение рулевого колеса 14 в одном из двух направлений, которое соответствует меньшему расстоянию от начального углового положения до заранее заданного углового положения. Кроме того, может существовать несколько заранее заданных угловых положений, которые обеспечивают, по крайней мере, частичный обзор зажигания 48, и контроллер 52 может быть также запрограммирован в соответствии с этими данными на вращение рулевого колеса 14 из начального углового положения в одно из нескольких заранее заданных угловых положений, которое требует наименьшей степени вращения рулевого колеса.
Транспортное средство 10 и/или система 20 рулевого управления может иметь такую конструкцию, что вращение рулевого колеса 14 на 90 градусов обеспечивает поворот колеса на 10 градусов. Рулевое колесо 14 может также иметь такую конструкцию, что по крайней мере одно угловое положение, обеспечивающее, по крайней мере, частичный обзор зажигания 48, имеет место при каждом повороте рулевого колеса 14 на 90 градусов.
Если вращение рулевого колеса 14 из начального углового положения в заранее заданное угловое положение, которое обеспечивает, по крайней мере, частичный обзор в зажигания 48, требует поворота колеса на угол более 10 градусов, то контроллер 52 может запретить вращение. И наоборот, контроллер 52 может быть запрограммирован на вращение рулевого колеса 14 вне зависимости от угла поворота колеса. Например, контроллер 52 может быть запрограммирован на вращение рулевого колеса 14 в конечное положение, расположенное в точке, отстоящей на 90 градусов по часовой стрелке от центрального положения, каждый раз вне зависимости от начального положения. Конструкция системы может также позволять контроллеру 52 подавать команду о вращении рулевого колеса 14 без поворота колеса 12 транспортного средства. Примером реализации такого подхода является задействование электронной системы 36 управления или системы активного переднего рулевого управления, и расцепление рулевого колеса 14 от системы 20 рулевого управления.
Рулевая колонка 44 может также координировать замок 46 блокировки рулевой колонки в конечном положении. При вращении рулевого колеса 14 в конечное положение рулевое колесо 14 и/или вал 24 рулевого колеса могут быть повернуты в положение, в котором механизм блокировки рулевой колонки сцеплен с механизмом и блокирует рулевое колесо 14. Система может иметь только одно место блокировки таким образом, что рулевое колесо 14 может быть заблокировано только в одном конечном положении, например, на 90 градусов по часовой стрелке от центрального положения.
В качестве альтернативы замок 46 блокировки рулевой колонки может иметь несколько фиксаторов по ходу углового вращения рулевого колеса 14, и может иметь такую конструкцию, что каждый фиксатор расположен в угловом положении, которое является предпочтительным для обнаружения места нахождения зажигания 48. В данном случае рулевое колесо 14 и/или вал 24 рулевого колеса могут быть помещены в наиболее близкое из доступных положение, в котором механизм блокировки колонки рулевого колеса сцеплен с механизмом и блокирует рулевое колесо 14, а также данное положение является предпочтительным для обнаружения зажигания 48. Замок 46 блокировки рулевой колонки может быть использован в качестве механического ограничителя для углового вращения рулевого колеса 14, при этом процесс вращения будет завершен при превышении порогового значения крутящего момента рулевого колеса 14, соответствующего заблокированному положению. Система может быть также использована вместе с замком 46 блокировки рулевой колонки, который может быть задействован в любом угловом положении рулевого колеса 14, в котором замок 46 блокировки рулевой колонки может быть удержан в незадействованном положении, позволяющем рулевому колесу 14 вращаться до достижения конечного положения, после чего происходит сцепление с замком 46 блокировки рулевой колонки для блокирования рулевого колеса 14 в данном положении.
Система, описанная выше, также может быть выполнена с возможностью автоматически поворачивать рулевое колесо 14 и приводить его в заблокированное положение вне зависимости от обзора места нахождения зажигания. Эта система автоматического блокирования рулевой колонки может функционировать аналогично системе, описанной выше, при этом контроллер 52 может быть запрограммирован на вращение рулевого колеса на основании индикации о том, что транспортное средство 10 находится в припаркованном положении, для обеспечения блокировки рулевого колеса 14 каждый раз после завершения парковки транспортного средства 10. Данное свойство может быть использовано для повышения безопасности припаркованного транспортного средства, а также улучшения противоугонных средств транспортного средства.
На Фиг.2-5 представлены возможные варианты рулевых колес 100, 200 в положении с малым уровнем α1 и α2 обзора места зажигания (Фиг.2 и 4) и возможные варианты рулевых колес в положении с большим уровнем β1 и β2 обзора места зажигания (Фиг.3 и 5). Каждое рулевое колесо 100, 200 имеет центральную ступицу 102, 202, по крайней мере две спицы 102, 204 и внешнее кольцо 106, 206, соединенное с центральной ступицей 102, 202 с помощью по крайней мере двух спиц 102, 204, соответственно. В рулевых колесах 100, 200 может быть образовано некоторое количество промежутков 108, 208 для обзора. Каждый промежуток 108, 208 для обзора может быть, по крайней мере частично, образован внешним кольцом 106, 206, центральной ступицей 102, 202 и по крайней мере двумя спицами 104, 204, и может способствовать формированию промежутков 108, 208 для обзора через рулевые колеса 100, 200.
Фиг.2 и 3 представляют собой виды для транспортного средства, место 110 зажигания которого расположено на приборной панели 112. Приборная панель 112 может быть также названа приборным щитком или пультом, расположенным за рулевым колесом 100 или под ним. В данном варианте приборная панель 112 не имеет приборов. Рулевое колесо 100 в положении с малым уровнем α1 обзора места нахождения зажигания, как показано на Фиг.2, препятствует обзору места 110 нахождения зажигания для водителя. Рулевое колесо 100 в положении с большим уровнем β1 обзора места нахождения зажигания, как показано на Фиг.3 позволяет, по крайней мере частично, видеть место 110 зажигания. Расположение места для зажигания в данном контексте означает, что место нахождения зажигания само по себе может быть видно водителю, или что водитель может видеть углубление, выемку или другой физический указатель расположения места для зажигания. Место для зажигания само по себе необязательно должно быть видно водителю, если водитель видит указатель, который позволяет определить его расположение. Рулевое колесо 100 автоматически вращается из начального положения α1 в конечное положение β1, чтобы обеспечить по крайней мере частичный обзор места 110 для зажигания сквозь один из промежутков 108 для обзора.
Фиг.4 и 5 представляют собой вид для транспортного средства, место 210 зажигания которого расположено на рулевой колонке 214. Рулевое колесо 200 в положении с малым уровнем α2, обзора места нахождения зажигания, как показано на Фиг.4, препятствует обзору места 210 нахождения зажигания для водителя. Рулевое колесо 200 в положении с большим уровнем β2 обзора места включения зажигания, как показано на Фиг.5, позволяет, по крайней мере частично, видеть место 210 нахождения зажигания. Как и в предыдущем случае, расположение места зажигания в данном контексте означает, что место нахождения зажигания само по себе может быть видно водителю, или что водитель может видеть углубление, выемку или другой физический указатель расположения места для зажигания. Место для зажигания само по себе необязательно должно быть видно водителю, если водитель видит указатель, который позволяет определить его расположение. Рулевое колесо 200 автоматически вращается из начального положения α2 в конечное положение β2, чтобы обеспечить по крайней мере частичный обзор места 210 для зажигания через один из промежутков 208 для обзора.
Система применяет контроллер 52 для вращения рулевого колеса 100, 200 из начального положения α1, α2 в конечное положение β1, β2 с целью обеспечения улучшенного обзора места 110, 210 нахождения зажигания. Данная система может использовать датчик 38 угла поворота рулевого колеса (см. Фиг.1) для измерения начального положения α2, α2 и вращения рулевого колеса 100, 200 в заранее заданный угол β1, β2 для обеспечения улучшенной видимости, как описано выше. Контроллер 52 может осуществлять обмен данными с датчиком 38 углового перемещения рулевого колеса и иметь заранее заданную карту положений рулевого колеса в соответствии с уровнями видимости места нахождения зажигания. Контроллер 52 может быть также запрограммирован на вращение рулевого колеса 100, 200 в положение с большим уровнем β1, β2 видимости места зажигания, когда рулевое колесо находится в положении с меньшими уровнем α1, α2 видимости.
Контроллер 52 может быть также запрограммирован на вращение рулевого колеса 100, 200 только в том случае, если рулевое колесо 100, 200 может быть перемещено из положения с малым уровнем α1, α2 видимости зажигания в положение с большим уровнем β1, β2 видимости зажигания при угловом перемещении колеса 12 транспортного средства на 10 градусов или менее. Контроллер 52 может быть предварительно запрограммирован в соответствии с соотношением между вращением рулевого колеса и угловым перемещением колеса транспортного средства. Контроллер 52 может быть запрограммирован на определение углового перемещения рулевого колеса 100, 200, которое может превышать поворот колеса 12, равный 10 градусам, и запрещение углового перемещения рулевого колеса 100, 200, если это приведет к превышению предельного значения. Контроллер 52 может также работать совместно с другой системой транспортного средства, чтобы обеспечить поворот рулевого колеса 100, 200 без вращения колеса 12 транспортного средства.
На Фиг.6 представлена логическая схема способа улучшения обзора места нахождения зажигания в транспортном средстве. На этапе 300 выполняется проверка, находится ли транспортное средство в припаркованном состоянии. Индикация о том, что транспортное средство находится в припаркованном состоянии, может иметь место при переводе автоматической коробки передач в положение стоянки, при задействовании стояночного тормоза, при завершении автоматической парковки или при дистанционном запуске. Если транспортное средство не находится в припаркованном состоянии, то способ может повторять цикл целесообразное количество раз до выполнения данного условия. Если транспортное средство находится в припаркованном состоянии, то способ может перейти к этапу 302.
На этапе 302 выполняется проверка, находится ли рулевое колесо в положении, которое фактически препятствует обзору места нахождения зажигания для водителя. Индикация о том, что рулевое колесо находится в положении, которое фактически препятствует водителю увидеть место нахождения зажигания, может быть установлена путем сравнения углового положения рулевого колеса, полученного с помощью датчика углового перемещения рулевого колеса, с заранее заданной картой угловых положений, которые фактически препятствуют водителю увидеть место зажигания. Если рулевое колесо не находится в положении, которое фактически препятствует водителю увидеть место зажигания, то способ может повторять цикл целесообразное количество раз до выполнения данного условия. Если рулевое колесо находится в положении, которое фактически препятствует водителю увидеть место зажигания, то способ может перейти к этапу 304. Этапы 300 и 302 могут быть взаимозаменяемыми и могут быть выполнены последовательно или одновременно, при этом оба условия должны иметь место до перехода к этапу 304. В программируемой последовательности может быть предусмотрена дополнительная остановка, только для проверки положения рулевого колеса, которое препятствует обзору водителем места зажигания, один раз при каждой новой индикации о том, что транспортное средство было переведено в припаркованное состояние.
На этапе 304 рулевое колесо перемещается в конечное положение, которое обеспечивает по крайней мере частичный обзор места зажигания. Для вращения рулевого колеса в конечное угловое положение может быть использован привод. Конечное угловое положение отличается от начального углового положения, чтобы обеспечить, по крайней мере, частичный обзор места зажигания. Конечное угловое положение может быть определено путем сравнения углового положения рулевого колеса, определенного с помощью датчика углового перемещения рулевого колеса, с заранее заданной картой угловых положений, которые обеспечивают, по крайней мере, частичный обзор места зажигания. В способе может быть также использовано угловое вращение рулевого колеса из начального положения в ближайшее конечное положение, обеспечивающее обзор места зажигания. Такое вращение может быть выполнено по часовой стрелке или против часовой стрелки в соответствии с меньшей угловой разностью.
Способ может также предусматривать необходимость наличия дополнительных условий до начала автоматического вращения рулевого колеса в положение обзора места зажигания. Такие дополнительные условия могут включать в себя проверку, находится ли транспортное средство на склоне, удерживают ли рулевое колесо, низкий ли заряд аккумулятора транспортного средства или покинул ли водитель транспортное средство.
Несмотря на то что выше изложены примерные варианты реализации полезной модели, допускаются и другие ее варианты. Более того, термины, использованные в данном описании, имеют скорее описательный, нежели ограничивающий характер, и следует понимать, что могут быть выполнены различные изменения описанных систем без отклонения от сущности и объема предложенного решения. Отличительные особенности различных вариантов реализации могут быть объединены с образованием дополнительных вариантов предложенного решения.
Предложена система для автоматического поворота рулевого колеса в положение, обеспечивающее улучшенный обзор места нахождения зажигания, если транспортное средство припарковано, а рулевое колесо препятствует такому обзору. Индикация о том, что транспортное средство находится в припаркованном состоянии, может иметь место при переводе автоматической коробки передач в положение стоянки, при задействовании стояночного тормоза, при завершении автоматической парковки или во время дистанционного запуска. Вращение рулевого колеса для обеспечения обзора места зажигания выполняется при одновременном повороте ходовых колес транспортного средства менее чем на 10 градусов. Достигается улучшение видимости места нахождения замка зажигания через рулевое колесо, когда водитель находится в нормальном положении на сиденье. 14 з.п. ф-лы, 6 ил.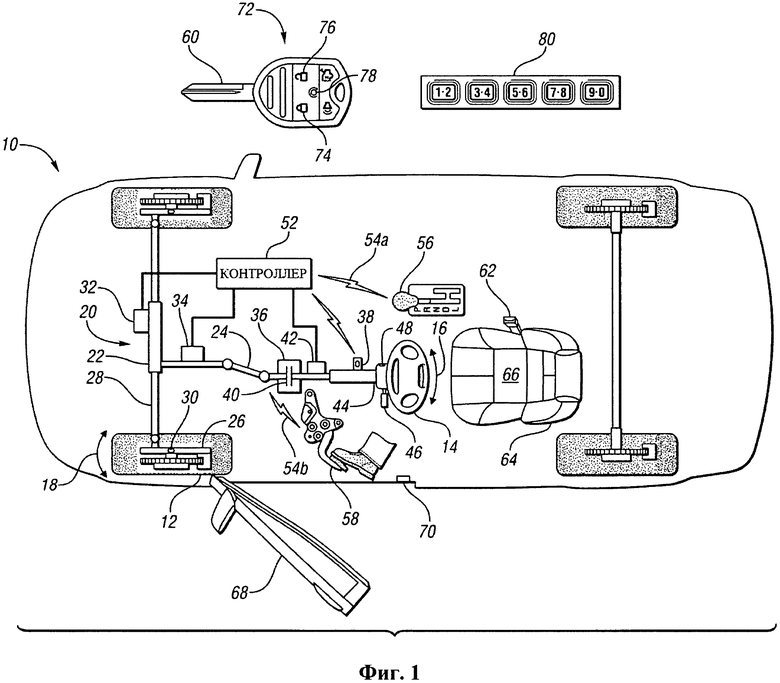
1. Система для улучшения обзора места нахождения зажигания в транспортном средстве, которая включает в себя привод, выполненный с возможностью вращать рулевое колесо, индикатор для обеспечения индикации припаркованного состояния транспортного средства, а также контроллер, сообщающийся с приводом и с датчиком углового перемещения рулевого колеса, а также выполненный с возможностью оценивать сигналы индикации и, по крайней мере, когда транспортное средство находится в припаркованном состоянии, поворачивать рулевое колесо из начального углового положения в заранее заданное угловое положение, которое обеспечивает по крайней мере частичный обзор места нахождения зажигания.
2. Система по п.1, в которой индикация о припаркованном состоянии транспортного средства имеет место при переводе автоматической коробки передач в положение стоянки.
3. Система по п.1, в которой индикация о припаркованном состоянии транспортного средства имеет место, когда задействован стояночный тормоз.
4. Система по п.1, в которой индикация о припаркованном состоянии транспортного средства имеет место при завершении автоматической парковки.
5. Система по п.1, в которой индикация о припаркованном состоянии транспортного средства имеет место при дистанционном запуске.
6. Система по п.1, в которой контроллер дополнительно запрограммирован на вращение рулевого колеса при обнаружении по крайней мере одного второго индикатора действия, выбранного из группы, включающей в себя: извлечение ключа из замка зажигания; пристегивание водительского ремня безопасности; отстегивание водительского ремня безопасности; покидание водителем водительского сиденья, размещение водителя на водительском сиденье, открывание водительской двери, закрывание водительской двери, нажатие кнопки блокировки на брелоке, нажатие кнопки разблокировки на брелоке, нажатие кнопки дистанционного запуска на брелоке, подача команды о блокировке с помощью кнопочной панели, подача команды о разблокировке с помощью кнопочной панели, направление команды о дистанционной блокировке транспортного средства, направление команды о дистанционной разблокировке транспортного средства.
7. Система по п.1, в которой контроллер дополнительно запрограммирован на запрещение вращения рулевого колеса при обнаружении по крайней мере одного третьего индикатора условия работы транспортного средства, выбранного из группы, включающей в себя: стоянку транспортного средства под углом, превышающим пороговое значение; превышение порогового значения крутящего момента рулевого колеса, крутящего момента; и снижение заряда аккумулятора ниже порогового уровня.
8. Система по п.1, в которой привод представляет собой привод усилителя, являющийся частью системы рулевого управления с усилением.
9. Система по п.1, в которой рулевое колесо соединено с по крайней мере одним колесом транспортного средства посредством системы рулевого управления, а контроллер дополнительно запрограммирован на вращение рулевого колеса на максимальное расстояние, чтобы по крайней мере одно колесо на транспортном средстве повернулось максимум на 10 градусов.
10. Система по п.1, в которой рулевое колесо соединено с по крайней мере одним колесом транспортного средства посредством электронной системы управления, а контроллер дополнительно запрограммирован на вращение рулевого колеса без поворота колес транспортного средства.
11. Система по п.1, в которой контроллер дополнительно запрограммирован на вращение рулевого колеса в одном из двух направлений, которое соответствует кратчайшему расстоянию между начальным угловым положением и заранее заданным угловым положением.
12. Система по п.1, в которой существует несколько положений, которые обеспечивают по крайней мере частичный обзор места нахождения зажигания, причем контроллер запрограммирован на вращение рулевого колеса в одно из таких положений, которое требует наименьшей степени вращения рулевого колеса из начального положения.
13. Система по п.1, в которой конечное положение, которое обеспечивает по крайней мере частичный обзор места нахождения зажигания, отстоит на 90 градусов по часовой стрелке от центрального положения, причем контроллер запрограммирован на вращение рулевого колеса в это конечное положение.
14. Система по п.1, в которой рулевое колесо имеет внешнее кольцо, соединенное с центральной ступицей с помощью по крайней мере двух спиц, при этом внешнее кольцо, центральная ступица и по крайней мере две спицы образуют просвет в рулевом колесе, а положение, которое обеспечивает по крайней мере частичный обзор места нахождения зажигания, включает в себя по крайней мере часть указанного просвета.
15. Система по п.1, которая дополнительно содержит замок блокировки рулевой колонки, предназначенный для блокирования рулевого колеса в положении, которое обеспечивает по крайней мере частичный обзор места нахождения зажигания, причем контроллер также запрограммирован на вращение рулевого колеса до сцепления с замком блокировки рулевой колонки.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

