[Область техники, к которой относится изобретение]
[0001]
Настоящее изобретение относится к способу помощи при парковке и устройству помощи при парковке.
[Уровень техники]
[0002]
Существует традиционно известный способ помощи при парковке (Патентный документ 1), включающий в себя, при помощи параллельной парковки транспортного средства, определение того, равна или превышает длина парковочного места спереди для транспортного средства сумме всей длины транспортного средства и заданной длины, помощь при парковке транспортного средства с маршрутом клотоидной кривой, включая отсутствие статического рулевого управления, если длина парковочного места равна или превышает сумму всей длины транспортного средства и заданной длины, и помощь при парковке транспортного средства по маршруту, включая статическое рулевое управление, когда длина парковочного места меньше сумма всей длины транспортного средства и заданной длины.
[Документ предшествующего уровня техники]
[Патентный документ]
[0003]
[Патентный документ 1] Патент Японии № 6062406
[Сущность изобретения]
[Проблемы, решаемые изобретением]
[0004]
В вышеупомянутом уровне техники при помощи при парковке транспортного средства по маршруту, требующему операции поворота рулевого колеса (или ограничение угла поворота колеса), направление рулевого управления рассматриваемого транспортного средства изменяется на обратное после операции поворота рулевого колеса, в результате чего возникает проблема в том, что время, необходимое для парковки, становится больше.
[0005]
Проблема, которая должна быть решена настоящим изобретением, состоит в том, чтобы обеспечить способ помощи при парковке и устройство помощи при парковке, в которых необходимое время парковки может быть сокращено при помощи при парковке транспортного средства по маршруту, требующему операцию поворота рулевого колеса.
[Средства для решения проблем]
[0006]
В настоящем изобретении вышеупомянутая проблема решается путем определения направления поворота, в которое поворачивает рассматриваемое транспортное средство по маршруту движения из положения поворота рулевого колеса до парковочного места, и формирования маршрута из текущего положения рассматриваемого транспортного средства до положения поворота рулевого колеса таким образом, что направление рулевого управления рассматриваемого транспортного средства соответствует направлению поворота в то время, когда рассматриваемое транспортное средство остановлено в положении поворота рулевого колеса.
[Эффект изобретения]
[0007]
Настоящее изобретение может сократить время парковки, необходимое в случае оказания помощи при парковке транспортного средства по маршруту, требующему операцию поворота рулевого колеса.
[Краткое описание чертежа]
[0008]
Фиг. 1 представляет собой блок-схему, иллюстрирующую примерную конфигурацию системы помощи при парковке согласно варианту осуществления согласно настоящему изобретению.
Фиг. 2 - вид в перспективе транспортного средства, иллюстрирующий примерную компоновку устройств формирования изображения настоящего варианта осуществления, установленных на рассматриваемом транспортном средстве.
Фиг. 3 - примерное изображение, отображаемое на дисплее, которое является изображением с высоты птичьего полета, созданным устройством обработки изображений настоящего варианта осуществления.
Фиг. 4 - вид сверху транспортного средства, иллюстрирующий примерную компоновку устройств определения дальности настоящего варианта осуществления, установленных на рассматриваемом транспортном средстве.
Фиг. 5 - вид сверху, иллюстрирующий примерные шаблоны линий, определяющих зоны парковки согласно настоящему варианту осуществления.
Фиг. 6 - вид сверху, иллюстрирующий маршрут парковки согласно сравнительному примеру настоящего изобретения.
Фиг. 7 - вид сверху, иллюстрирующий примерный маршрут парковки (практический пример), вычисленный устройством помощи при парковке настоящего варианта осуществления.
Фиг. 8 - вид сверху, иллюстрирующий другой примерный маршрут парковки (практический пример), вычисленный устройством помощи при парковке настоящего варианта осуществления.
Фиг. 9A - вид сверху (часть 1), иллюстрирующий еще один примерный маршрут парковки (практический пример), вычисленный устройством помощи при парковке настоящего варианта осуществления.
Фиг. 9В - вид сверху (часть 2), иллюстрирующий еще один примерный маршрут парковки (практический пример), вычисленный устройством помощи при парковке настоящего варианта осуществления.
Фиг. 9С - вид сверху (часть 3), иллюстрирующий еще один примерный маршрут парковки (практический пример), вычисленный устройством помощи при парковке настоящего варианта осуществления.
Фиг. 9D - вид сверху (часть 4), иллюстрирующий еще один примерный маршрут парковки (практический пример), вычисленный устройством помощи при парковке настоящего варианта осуществления.
Фиг. 10 - вид сверху, иллюстрирующий еще один примерный маршрут парковки (практический пример), вычисленный устройством помощи при парковке настоящего варианта осуществления.
Фиг. 11 - временная диаграмма, иллюстрирующая план движения для помощи при парковке согласно сравнительному примеру настоящего изобретения, в котором (A) - временная диаграмма скорости транспортного средства, а (B) - временная диаграмма угла рулевого управления.
Фиг. 12 - временная диаграмма, иллюстрирующая примерный план движения для помощи при парковке устройством помощи при парковке настоящего варианта осуществления, на которой (A) - временная диаграмма скорости транспортного средства, а (B) - временная диаграмма угла рулевого управления.
Фиг. 13 - временная диаграмма, иллюстрирующая еще один примерный план движения для помощи при парковке устройством помощи при парковке настоящего варианта осуществления, на котором (A) - временная диаграмма скорости транспортного средства, а (B) - временная диаграмма угла рулевого управления.
Фиг. 14 - блок-схема, иллюстрирующая примерную процедуру управления устройством помощи при парковке настоящего варианта осуществления, показанного на фиг. 1.
Фиг. 15 - блок-схема, иллюстрирующая примерную подпрограмму этапа S6 в блок-схеме, показанной на фиг. 14.
[Вариант(ы) осуществления настоящего изобретения]
[0009]
В дальнейшем вариант осуществления согласно настоящему изобретению будет описан со ссылкой на прилагаемые чертежи.
[0010]
Фиг. 1 представляет собой блок-схему, иллюстрирующую конфигурацию системы 1000 помощи при парковке согласно варианту осуществления настоящего изобретения. Система 1000 помощи при парковке настоящего варианта осуществления представляет собой систему для помощи движения при перемещении рассматриваемого транспортного средства, перемещающегося (паркующегося) из текущего положения до парковочного места. Система 1000 помощи при парковке настоящего варианта осуществления включает в себя устройство 1 помощи при парковке, устройство 2 формирования изображения, устройство 3 обработки изображения, устройство 4 определения дальности, контроллер 5 транспортного средства, приводную систему 6, датчик 7 скорости транспортного средства и датчик 8 угла рулевого управления. Эти составляющие компоненты соединены сетью контроллеров (CAN, controller area network) или другой бортовой локальной сетью для обмена информацией друг с другом.
[0011]
Устройство 1 помощи при парковке настоящего варианта осуществления включает в себя устройство 11 управления и устройство 12 вывода. Устройство 11 управления настоящего варианта осуществления включает в себя ROM 111, которое является постоянным запоминающим устройством (ROM, read only memory), хранящим программы помощи при парковке, CPU 112, который является центральным процессором (CPU, central processing unit), выполняющим программы, хранящиеся в ROM 111, и RAM 113, которая представляет собой оперативную память (RAM, random access memory), функционирующую как доступное запоминающее устройство. Устройство 12 вывода включает в себя дисплей 121, который представляет собой дисплейное оборудование для обеспечения информации, такой как пространство, в котором рассматриваемое транспортное средство может быть припарковано для водителя. Программы помощи при парковке, хранящиеся в ROM 111 настоящего варианта осуществления, являются программами, которые позволяют устройству 11 управления выполнять процедуру управления для обнаружения парковочного места, на котором может быть припарковано рассматриваемое транспортное средство, представляя парковочное место на дисплее 121, вычисляя маршрут парковки для парковки рассматриваемого транспортного средства на парковочном месте, установленном водителем, и помощи при операции перемещения рассматриваемого транспортного средства из текущего положения на парковочное место.
[0012]
Устройство 1 помощи при парковке настоящего варианта осуществления применимо к автоматизированной (или автономной) парковке, в которой парковка может быть реализована автоматически или автономно путем выполнения всех операций рулевого управления, акселератора и торможения в автоматическом или автономном режиме, и также применимо к полуавтоматической (или полуавтономной) парковке, в которой парковка может быть реализована путем ручного выполнения по меньшей мере одной из операций рулевого управления, акселератора и торможения и выполнения остальных операций в автоматическом или автономном режиме. Кроме того, устройство 1 помощи при парковке настоящего варианта осуществления также применимо для помощи при парковке, в которой водителю предоставляется маршрут парковки, так что водитель может управлять рулевым управлением, акселератором и тормозом, чтобы припарковать рассматриваемое транспортное средство на парковочном месте. В настоящем варианте осуществления автоматически сбрасываемый переключатель, такой как переключатель аварийного останова, используется в автоматизированной (или автономной) парковке и полуавтоматизированной (или полуавтономной) парковке. В устройстве 1 помощи при парковке выполнение автоматизированного (или автономного) вождения для рассматриваемого транспортного средства выполняется, когда переключатель аварийного останова находится в нажатом состоянии, а также автоматизированное (или автономное) вождение и полуавтоматизированное (или полуавтономное) вождение для рассматриваемого транспортного средства прекращается после отпускания нажатия переключателя аварийного останова.
[0013]
Кроме того, устройство 1 помощи при парковке настоящего варианта осуществления может быть выполнено с возможностью работы в ответ на сигнал, передаваемый от портативного оконечного устройства (оборудования, такого как смартфон, КПК или интеллектуальный ключ, который запирает и отпирает двери транспортного средства), который может обмениваться информацией с устройством 1 помощи при парковке. В этом случае устройство 1 помощи при парковке настоящего варианта осуществления также применимо к удаленной парковке, при которой водитель может манипулировать и парковать рассматриваемое транспортное средство снаружи транспортного средства.
[0014]
Устройство 2 формирования изображения по настоящему варианту осуществления, устройство 3 обработки изображения по настоящему варианту осуществления и устройство 4 определения дальности по настоящему варианту осуществления являются оборудованием, способным обнаруживать информацию о среде передвижения, включая наличие любого препятствия, расположенного вокруг рассматриваемого транспортного средства впереди с обеих сторон, сзади или по всей окружности рассматриваемого транспортного средства, а также в другой ситуации вокруг рассматриваемого транспортного средства.
[0015]
Устройство 2 формирования изображения по настоящему варианту осуществления является бортовым устройством, выполненным с возможностью распознавания информации об окружающей среде вокруг рассматриваемого транспортного средства по изображениям. Устройство 2 формирования изображения по настоящему варианту осуществления получает информацию об окружающей среде вокруг рассматриваемого транспортного средства посредством формирования изображения окружающей среды рассматриваемого транспортного средства и получения данных изображения, включая любые препятствия, существующие вокруг рассматриваемого транспортного средства. Примеры устройства 2 формирования изображения включают камеру, оборудованную элементами датчика изображения, такими как CCD (ПЗС), ультразвуковая камера, инфракрасная камера и другие камеры. Информация об окружающей среде вокруг рассматриваемого транспортного средства, полученная устройством 2 формирования изображения, выводится на устройство 11 управления.
[0016]
Фиг. 2 - вид в перспективе рассматриваемого транспортного средства V1, иллюстрирующий примерную компоновку устройства 2 формирования изображения настоящего варианта осуществления, установленного на рассматриваемом транспортном средстве V1. Согласно примеру, показанному на фиг. 2, устройство 2a формирования изображения расположено на передней части решетки радиатора рассматриваемого транспортного средства V1, устройство 2b формирования изображения расположено под левым дверным зеркалом, устройство 2c формирования изображения расположено под зеркалом правой двери, а устройство 2d формирования изображения расположено возле заднего бампера. Каждое из устройств 2a-2d формирования изображения может быть камерой, содержащей широкоугольный объектив с большим углом обзора. Как показано на фиг. 2, устройство 2a формирования изображения захватывает изображение, охватывающее от переднего правого до переднего левого направления рассматриваемого транспортного средства V1, устройство 2b формирования изображения захватывает изображение, охватывающее от переднего левого до заднего левого угла рассматриваемого транспортного средства V1, устройство 2c формирования изображения захватывает изображение, охватывающее от переднего правого до заднего правого направления рассматриваемого транспортного средства V1, и устройство 2d формирования изображения захватывает изображение, охватывающее от заднего правого до заднего левого угла рассматриваемого транспортного средства V1. Принятие такой компоновки устройства 2 формирования изображения может уменьшить любое слепое пятно, в котором информация не может быть получена в случае получения информации об окружающей среде вокруг рассматриваемого транспортного средства V1. При обнаружении препятствия устройством 2 формирования изображения можно использовать метод стереозвука движения, использующий устройства 2a-2d формирования изображения.
[0017]
Устройство 3 обработки изображений настоящего варианта осуществления является устройством, выполненным с возможностью формирования изображения с высоты птичьего полета, указывающего ситуацию вокруг рассматриваемого транспортного средства V1, когда рассматриваемое транспортное средство V1 рассматривается с верхней виртуальной точки обзора. Виртуальная точка обзора представляет собой, например, виртуальную точку обзора VP, показанную на фиг. 2. Устройство 3 обработки изображений создает изображение с высоты птичьего полета, используя множество захваченных изображений, полученных посредством устройства 2 формирования изображения. Обработка изображений для формирования изображения с высоты птичьего полета в устройстве 3 обработки изображений представляет собой, например, но не ограничиваясь этим, способ обработки, описанный в SUZUKI Masayasu, CHINOMI Satoshi, and TAKANO Teruhisa, "Development of All-around View System", Society of Automotive Engineers of Japan, Academic Lecture Pre-print Collection, 116-07 (2007-10), 17-22. Изображение с высоты птичьего полета (или круговое изображение), сформированное устройством 3 обработки изображений, выводится на устройство 11 управления и представляется водителю дисплеем 121, показанным на фиг. 2. Хотя дисплей 121, показанный на фиг. 2 расположен в верхней части приборной панели между сиденьем водителя и сиденьем пассажира, положение установки дисплея 121 особо не ограничивается, и дисплей 121 может быть установлен в подходящем положении.
[0018]
Фиг. 3 - изображение, отображаемое на дисплее, которое представляет собой примерное изображение с высоты птичьего полета, созданное устройством 3 обработки изображений настоящего варианта осуществления. Сцена движения рассматриваемого транспортного средства V1 на фиг. 3 - сцена, в которой рассматриваемое транспортное средство V1 движется по парковке, чтобы найти парковочное место PS. Изображение, отображаемое на дисплее, показанном на фиг. 3 включает в себя изображение IM1 с высоты птичьего полета, созданное устройством 3 обработки изображений в соответствии с настоящим вариантом осуществления, на левой стороне, и изображение IM2 наблюдения для наблюдения за окружающей средой рассматриваемого транспортного средства V1, на правой стороне. Рассматриваемое транспортное средство V1 отображается в центре изображения IM1 с высоты птичьего полета, а зоны парковки, разделенные белыми линиями, отображаются с левой и правой сторон от рассматриваемого транспортного средства V1. Эти зоны парковки включают в себя зону, в которой обнаружено другое транспортное средство V2 и отображается это транспортное средство V2, и зону, в которой любое препятствие, такое как другое транспортное средство V2, не обнаруживается и рассматриваемое транспортное средство V1 может быть припарковано, что обозначено в рамке пунктирной линией , указывающей парковочное место PS как зону, в которой рассматриваемое транспортное средство V1 может быть припарковано. С другой стороны, изображение IM2 наблюдения - это изображение, полученное от устройства 2a формирования изображения, расположенного на передней части решетки радиатора рассматриваемого транспортного средства V1, которое отображается, чтобы представить информацию об окружающей среде передней стороны, то есть текущее направление движения рассматриваемого транспортного средства V1. Изображение IM2 наблюдения включает в себя, например, отображение препятствия, такого как другое транспортное средство V2, в дополнение к зонам парковки, разделенным белыми линиями.
[0019]
Устройство 4 определения дальности согласно настоящему варианту осуществления является устройством, выполненным с возможностью вычисления относительного расстояния и относительной скорости между рассматриваемым транспортным средством V1 и объектом. Устройство 4 определения дальности представляет собой радар или гидролокатор, такой как лазерный радар, радар миллиметрового диапазона (например, LRF), блок обнаружения и определения расстояния с помощью света (LiDAR, light detection and ranging) или ультразвуковой радар. На основе сигнала, полученного от радарного устройства или гидролокатора, устройство 4 определения дальности определяет присутствие/положение объекта и расстояние до этого объекта. Объектом является, например, препятствие, пешеход или любое другое транспортное средство вокруг рассматриваемого транспортного средства V1. Информация об объекте, обнаруженном устройством 4 определения дальности, выводится на устройство 11 управления. Во время помощи при парковке, если рассматриваемое транспортное средство V1 вероятно столкнется с объектом, обнаруженным устройством 4 определения дальности, устройство 11 управления настоящего варианта осуществления останавливает рассматриваемое транспортное средство V1 и информирует водителя о вероятности столкновения между обнаруженным объектом и рассматриваемым транспортным средством V1 с использованием дисплея 121.
[0020]
Фиг. 4 представляет собой вид сверху рассматриваемого транспортного средства V1, иллюстрирующий примерную компоновку устройства 4 определения дальности в случае, когда устройство 4 определения дальности согласно настоящему варианту осуществления установлено на рассматриваемом транспортном средстве V1. Рассматриваемое транспортное средство V1, проиллюстрированное на фиг. 4, включает в себя передние устройства 4a определения дальности, выполненные с возможностью обнаружения объектов перед рассматриваемый транспортным средством V1, устройства 4b определения дальности сбоку, выполненные с возможностью обнаружения объектов на правой и левой сторонах рассматриваемого транспортного средства V1, и задние устройства 4c определения дальности, выполненные с возможностью обнаружения объектов позади рассматриваемого транспортное средство V1. Рассматриваемое транспортное средство V1, проиллюстрированное на фиг. 4, включает в себя устройства с 4a-1 по 4a-4 определения дальности в качестве передних устройств 4a определения дальности, устройства с 4b-1 по 4b-4 определения дальности в качестве боковых устройств 4b определения дальности и устройства с 4c-1 по 4c-4 определения дальности в качестве задних устройств 4c определения дальности. Устройство 4 определения дальности согласно настоящему варианту осуществления может быть установлено, например, в бамперах рассматриваемого транспортного средства V1. Размещение устройства 4 определения дальности таким образом может предотвратить неточность вычисления относительного расстояния и относительной скорости между рассматриваемым транспортным средством V1 и окружающим объектом.
[0021]
Контроллер 5 транспортного средства настоящего варианта осуществления представляет собой бортовой компьютер, такой как электронный блок управления (ECU, electronic control unit), который электронным образом управляет приводной системой 6, управляющей движением рассматриваемого транспортного средства V1. Контроллер 5 транспортного средства управляет приводным устройством, тормозным устройством и рулевым устройством, включенными в приводную систему 6, чтобы оказывать помощь движению при перемещении рассматриваемого транспортного средства V1 для перемещения (парковки) из текущего положения на парковочное место PS. Контроллер 5 транспортного средства принимает от устройства 1 помощи при парковке команду управления на основе маршрута парковки, целевой скорости транспортного средства и целевого угла рулевого управления, вычисленного заранее. Каждый из маршрута парковки, целевой скорости транспортного средства и целевого угла рулевого управления будет описан ниже.
[0022]
Приводная система 6 настоящего варианта осуществления включает в себя приводное оборудование, такое как двигатель с электрическим приводом и/или двигатель внутреннего сгорания, служащие в качестве приводных источников движения, устройство передачи мощности, включающее в себя приводной вал, и автоматическую трансмиссию для передачи выходной мощности этих приводных источников движения на ведущие колеса, приводное устройство, которое управляет устройством передачи мощности, тормозное устройство, которое тормозит колеса, и устройство рулевого управления рулевого управления, которое управляет колесами, управляемыми в соответствии с углом поворота рулевого колеса (так называемая ручка). Контроллер 5 транспортного средства принимает от устройства 1 помощи при парковке команду управления на основе маршрута парковки и целевой скорости транспортного средства, вычисленной заранее. Затем контроллер 5 транспортного средства создает управляющий сигнал, который должен подаваться в приводное оборудование приводной системы 6 на основе команды управления от устройства 1 помощи при парковке, и управляет поведением транспортного средства при движении, включая ускорение/замедление. Приводная система 6 может автономно управлять скоростью транспортного средства рассматриваемого транспортного средства V1, принимая управляющий сигнал от контроллера 5 транспортного средства.
[0023]
Кроме того, приводная система 6 настоящего варианта осуществления включает в себя устройство рулевого управления. Устройство рулевого управления включает в себя привод рулевого управления, а привод рулевого управления включает в себя двигатель или тому подобное, прикрепленный к валу рулевой колонки. Устройство рулевого управления приводной системы 6 управляется контроллером 5 транспортного средства, так что рассматриваемое транспортное средство движется, сохраняя заданное боковое положение (положение в левом и правом направлении транспортного средства) относительно заранее вычисленного маршрута парковки. Контроллер 5 транспортного средства управляет устройством рулевого управления, используя по меньшей мере одну из информации об окружающей среде вокруг рассматриваемого транспортного средства V1, полученной устройством 2 формирования изображения, изображения IM1 с высоты птичьего полета, созданного устройством 3 обработки изображений, и информации о препятствии, о пешеходе или любом другом транспортном средстве вокруг рассматриваемого транспортного средства V1, обнаруженного устройством 4 определения дальности. В этом случае устройство 1 помощи при парковке передает контроллеру 5 транспортного средства команду управления на основе заранее вычисленного маршрута парковки и целевого угла рулевого управления. Затем контроллер 5 транспортного средства создает управляющий сигнал, который должен быть подан на устройство рулевого управления приводной системы 6, на основе команды управления от устройства 1 помощи при парковке, и выполняет управление рулевым управлением для рассматриваемого транспортного средства V1. Приводная система 6 может автономно управлять рулевым управлением рассматриваемого транспортного средства V1, принимая управляющий сигнал от контроллера 5 транспортного средства.
[0024]
Датчик 7 скорости транспортного средства согласно настоящему варианту осуществления является датчиком, который обеспечен в приводном устройстве приводной системы 6 и выполнен с возможностью определения скорости транспортного средства рассматриваемого транспортного средства V1 . Датчик 8 угла рулевого управления согласно настоящему варианту осуществления представляет собой датчик, который обеспечен в устройстве рулевого управления приводной системы 6 и выполнен с возможностью определения угла рулевого управления рассматриваемого транспортного средства V1. Скорость транспортного средства рассматриваемого транспортного средства V1 , определенная датчиком 7 скорости транспортного средства, и угол рулевого управления рассматриваемого транспортного средства V1, обнаруженный датчиком 8 угла рулевого управления, выводятся в устройство 11 управления через контроллер 5 транспортного средства.
[0025]
Устройство 11 управления настоящего варианта осуществления выполняет функцию сбора информации об окружающей среде, заключающуюся в получении информации об окружающей среде вокруг рассматриваемого транспортного средства V1, заставляя CPU 112 выполнять программы помощи при парковке, хранящиеся в ROM 111, функцию обнаружения парковочного места для обнаружения зоны парковки, в которой рассматриваемое транспортное средство V1 может быть припарковано, функция отображения парковочного места для отображения обнаруженного парковочного места PS в виде изображения IM1 с высоты птичьего полета на дисплее 121, функция вычисления маршрута парковки для расчета маршрута парковки для обеспечения возможности рассматриваемого транспортного средства V1 для перемещения из текущего положения на парковочное место PS (для того, чтобы быть припаркованным), и функция планирования движения для перемещения планирования движения для перемещения рассматриваемого транспортного средства V1 для парковки вдоль вычисленного маршрута парковки.
[0026]
Функция сбора информации об окружающей среде устройства 11 управления согласно настоящему варианту осуществления является функцией, которую устройство 11 управления может использовать для получения информации, относящейся к окружающей среде, включая наличие любого препятствия, расположенного вокруг рассматриваемого транспортного средства V1. Устройство 11 управления использует функцию сбора информации об окружающей среде для получения, например, информации о скорости транспортного средства у рассматриваемого транспортного средства V1, обнаруженной датчиком 7 скорости транспортного средства, и информации об угле рулевого управления у рассматриваемого транспортного средства V1, обнаруженной датчиком 8 угла рулевого управления, в качестве информации, относящейся к окружающей среде. Кроме того, устройство 11 управления использует функцию сбора информации об окружающей среде для получения информации о местоположении рассматриваемого транспортного средства V1 в качестве информации, относящейся к окружающей среде, которая была обнаружена устройством определения местоположения рассматриваемого транспортного средства (не показано), оснащенным, например, устройство GPS и гироскопический датчик, а также информацию о трехмерной карте с высокой точностью, включая информацию о местоположении различных объектов и конкретных точек, хранящуюся в ROM. Используя вышеупомянутую информацию, относящуюся к окружающей среде, устройство 11 управления настоящего варианта осуществления определяет, является ли сцена движения рассматриваемого транспортного средства V1 сценой, в которой рассматриваемое транспортное средство V1 собирается припарковаться на парковочном месте PS, посредством функция сбора информации об окружающей среде.
[0027]
Например, на основе информации, относящейся к окружающей среде, устройство 11 управления настоящего варианта осуществления определяет, что ситуация, в которой рассматриваемое транспортное средство V1 движется со скоростью транспортного средства, равной или меньшей, чем заданная скорость транспортного средства в течение заданного времени или более, является сцена, в которой рассматриваемое транспортное средство V1 собирается припарковаться на парковочном месте PS. В качестве альтернативы, когда на основе информации, относящейся к окружающей среде, определяется, что рассматриваемое транспортное средство V1 движется по парковке, такой как зона парковки автомобильной дороги, устройство 11 управления настоящего варианта осуществления определяет, что эта ситуация является сценой, в которой рассматриваемое транспортное средство V1 собирается припарковаться на парковочном месте PS. В качестве альтернативы, если информация, относящаяся к окружающей среде, получена с использованием устройства связи (не показано) посредством связи с внешней стороной транспортного средства (так называемая связь между транспортным средством и дорогой) или связи между транспортными средствами, устройство 11 управления настоящего варианта осуществления может ссылаться на это при определении сцены, в которой рассматриваемое транспортное средство V1 собирается припарковаться на парковочном месте PS. Когда определяется сцена, в которой рассматриваемое транспортное средство V1 собирается припарковаться на парковочном месте PS, устройство 11 управления настоящего варианта осуществления продолжает выполнение программ помощи при парковке. Напротив, например, когда на основе информации, относящейся к окружающей среде, определяется, что рассматриваемое транспортное средство V1 выезжает с парковки и движется по дороге, устройство 11 управления настоящего варианта осуществления определяет, что эта ситуация не является сценой, в которой рассматриваемое транспортное средство V1 собирается припарковать на парковочном месте PS. После определения того, что это не сцена, в которой рассматриваемое транспортное средство V1 собирается припарковаться на парковочном месте PS, устройство 11 управления настоящего варианта осуществления останавливает выполнение программ помощи при парковке.
[0028]
В случае определения сцены, в которой рассматриваемое транспортное средство V1 собирается припарковаться на парковочном месте PS, устройство 11 управления настоящего варианта осуществления использует функцию сбора информации об окружающей среде для получения изображений граничных линий, таких как белые линии вокруг рассматриваемого транспортного средства V1 и окружающих объектов, захваченных, например, устройствами 2 формирования изображения, прикрепленными к множеству частей рассматриваемого транспортного средства V1, в качестве информации, относящейся к окружающей среде. Кроме того, устройство 11 управления настоящего варианта осуществления использует функцию сбора информации об окружающей среде для получения результатов обнаружения, например, переднего устройства 4a определения диапазона, бокового устройства 4b определения диапазона и заднего устройства 4c определения диапазона в качестве информации, относящейся к окружающей среде. Используя вышеупомянутую информацию, относящуюся к окружающей среде, устройство 11 управления настоящего варианта осуществления обнаруживает парковочное место PS, которое является зоной парковки, в которой рассматриваемое транспортное средство V1 может быть припарковано. При обнаружении парковочного места PS может использоваться функция обнаружения парковочного места.
[0029]
Функция обнаружения парковочного места устройства 11 управления настоящего варианта осуществления является функцией, используемой для обнаружения зоны парковки, в которой рассматриваемое транспортное средство V1 может быть припарковано, с использованием информации об окружающей среде вокруг рассматриваемого транспортного средства V1, полученной функцией сбора информации об окружающей среде. При обнаружении парковочного места PS устройство 11 управления согласно настоящему варианту осуществления использует функцию обнаружения парковочного места, чтобы заставить устройство 3 обработки изображений создавать изображение IM1 с высоты птичьего полета, используя захваченное изображение, полученное устройством 2 формирования изображения. Устройство 11 управления настоящего варианта осуществления использует функцию обнаружения парковочного места, чтобы обнаруживать линии, определяющие границу зоны, из созданного изображения IM1 с высоты птичьего полета, и идентифицирует линии-кандидаты, которые определяют зону парковки, из обнаруженных линий. Затем устройство 11 управления настоящего варианта осуществления использует функцию обнаружения парковочного места, чтобы определить, определяют ли идентифицированные линии-кандидаты зону парковки. Когда определено, что идентифицированные линии-кандидаты определяют зону парковки, устройство 11 управления определяет, может ли рассматриваемое транспортное средство V1 быть припарковано в обнаруженной зоне парковки.
[0030]
Для обнаружения линий, определяющих границу зоны из изображения IM1 с высоты птичьего полета, устройство 11 управления в соответствии с настоящим вариантом осуществления использует функцию обнаружения парковочного места, чтобы выполнить обнаружение краев на изображении IM1 с высоты птичьего полета и вычислить разницу в яркости (контрастности). Затем устройство 11 управления настоящего варианта осуществления использует функцию обнаружения парковочного места, чтобы идентифицировать каждую последовательность пикселей, яркостная разность которых равна или превышает заданное значение из изображения IM1 с высоты птичьего полета, и вычисляет толщину и длину каждой линии. Цвет обнаруженной линии не всегда должен быть белым, а может быть красным, желтым или любым другим цветом.
[0031]
Устройство 11 управления настоящего варианта осуществления использует традиционно известный метод обработки изображения, такой как сопоставление с шаблоном, для идентификации линий-кандидатов, определяющих зону парковки, из обнаруженных линий. Шаблоны, которые должны использоваться при сопоставлении с шаблоном, заранее сохраняются в ROM 111 устройства 11 управления согласно настоящему варианту осуществления. Например, фиг. 5 (A) иллюстрирует сцену, в которой рассматриваемое транспортное средство V1 собирается припарковаться на парковочном месте PS1, которое является зоной парковки, в которой рассматриваемое транспортное средство V1 может быть припарковано, между другим транспортным средством V2a и другим транспортным средством V2b. В сцене на фиг. 5 (A), линии, которые определяют зону парковки, соответствующую парковочному месту PS1, представляют собой линию L1, линию L2 и линию L3, которые являются тремя сторонами со всех сторон, образующих прямоугольную форму парковочного места PS1. Устройство 11 управления настоящего варианта осуществления сохраняет комбинацию линий L1, L2 и L3, которые определяют зону парковки, в качестве шаблона, соответствующего сцене на фиг. 5 (A), в ROM 111.
[0032]
Кроме того, фиг. 5 (B) иллюстрирует сцену, в которой рассматриваемое транспортное средство V1 собирается параллельно припарковаться на парковочном месте PS2 между другим транспортным средством V2c и другим транспортным средством V2d. В сцене на фиг. 5 (B), устройство 11 управления настоящего варианта осуществления заставляет устройство 2 формирования изображения обнаруживать линию L4 как линию, которая определяет зону парковки, соответствующую парковочному месту PS2, и дополнительно обнаруживать бордюр или стену (не проиллюстрирована), расположенную с левой стороны другого транспортного средства V2c и другого транспортного средства V2d. Однако устройство 11 управления настоящего варианта осуществления не может определять какую-либо зону парковки от линии L4, бордюра и т.п. Следовательно, в сцене на фиг. 5 (B), устройство 11 управления настоящего варианта осуществления размещает виртуальную линию L5 позади другого транспортного средства V2c и виртуальную линию L6 перед другим транспортным средством V2d. Затем, если какая-либо зона парковки может быть определена линией L4, обнаруженной устройством 2 формирования изображения, вместе с виртуальными линиями L5 и L6, определяется, что линия L4 является линией, определяющей зону парковки. Устройство 11 управления настоящего варианта осуществления сохраняет комбинацию линий L4, виртуальной линии L5, расположенной позади другого транспортного средства V2c, и виртуальной линии L6, расположенной перед другим транспортным средством V2d, в качестве шаблона, соответствующего сцене на фиг. 5 (B), в ROM 111.
[0033]
Кроме того, фиг. 5 (C) иллюстрирует сцену, в которой рассматриваемое транспортное средство V1 собирается припарковаться под наклоном на парковочном месте PS3, которое является зоной парковки, в которой рассматриваемое транспортное средство V1 может быть припарковано, между другим транспортным средством V2e и другим транспортным средством V2f. В сцене на фиг. 5 (C), линии, которые определяют зону парковки, соответствующую парковочному месту PS3, представляют собой линию L7, линию L8, линию L9 и линию L10, которые являются сторонами, которые образуют прямоугольную форму парковочного места PS3. Устройство 11 управления настоящего варианта осуществления сохраняет комбинацию линий L7, L8, L9 и L10, которые являются линиями, определяющими зону парковки, в качестве шаблона, соответствующего сцене на фиг. 5 (C), в ROM 111.
[0034]
Кроме того, устройство 11 управления настоящего варианта осуществления проверяет окружение линий, идентифицированных как линии, определяющие зону парковки, для обнаружения присутствия любой линии-кандидата, имеющей более высокую вероятность быть линией, которая определяет зону парковки, чем идентифицированные линии. Например, если вновь идентифицируется линия с большей разностью яркостей, устройство 11 управления обнаруживает вновь идентифицированную линию как линию-кандидата, определяющую зону парковки. Напротив, когда нет линии-кандидата, имеющей более высокую вероятность быть линией, которая определяет зону парковки, чем идентифицированные линии, устройство 11 управления определяет, определяют ли идентифицированные линии зону парковки.
[0035]
Чтобы определить, определяют ли идентифицированные линии-кандидаты-кандидаты зону парковки, устройство 11 управления настоящего варианта осуществления определяет, удовлетворяют ли идентифицированные кандидаты заданным условиям. Заданные условия, например: (1) любая линия, имеющая длину, равную или превышающую установленное заранее пороговое значение расстояния первой линии (например, длина, соответствующая 15[м] в реальном расстоянии), не включается в линии, идентифицированные как линии-кандидаты, определяющие зону парковки; (2) любой набор линий, каждая из которых имеет длину, равную установленному заранее второму пороговому значению расстояния длины линии или превышающую его (например, длину, соответствующую 7[м] в реальном расстоянии), не включается в наборы двух смежных линий в пределах первого диапазона расстояний между линиями (например, длина, соответствующая от 3 до 5[м] в реальном расстоянии), установленного заранее, среди линий, идентифицированных как линии-кандидаты, определяющие зону парковки, и (3) любой набор линий каждая, имеющая длину, равную или превышающую установленное заранее третье пороговое значение расстояния между линиями (например, длина, соответствующая 15[м] в реальном расстоянии), не включается в наборы из двух смежных линий в пределах второго диапазона расстояний между линиями (например, длина, соответствующая от 2,5 до 5[м] в реальном расстоянии), установленного заранее, среди линий, извлеченных как линии-кандидаты, определяющие зону парковки. Если по меньшей мере одно из вышеуказанных условий (1), (2) и (3) не удовлетворяется, устройство 11 управления настоящего варианта осуществления определяет, что идентифицированные линии-кандидаты не определяют зону парковки. Напротив, когда все условия (1) - (3) удовлетворяются, устройство 11 управления настоящего варианта осуществления определяет, что идентифицированные линии-кандидаты определяют зону парковки, и обнаруживает эту зону парковки.
[0036]
Чтобы определить, может ли рассматриваемое транспортное средство V1 быть припарковано в обнаруженной зоне парковки, устройство 11 управления согласно настоящему варианту осуществления определяет, есть ли какое-либо препятствие в зоне парковки, используя информацию об объекте, обнаруженном с помощью устройство 4 определения дальности. Например, в сцене на фиг. 5 (A), заднее устройство 4c определения дальности рассматриваемого транспортного средства V1 используется для определения наличия любого препятствия в зоне парковки. Кроме того, в сцене на фиг. 5 (B), боковое устройство 4b определения дальности и заднее устройство 4c определения дальности рассматриваемого транспортного средства V1 используются для определения наличия любого препятствия в зоне парковки. Кроме того, в сцене на фиг. 5 (C), боковое устройство 4b определения дальности и заднее устройство 4c определения дальности рассматриваемого транспортного средства V1 используются для определения наличия любого препятствия в зоне парковки. Затем устройство 11 управления согласно настоящему варианту осуществления обнаруживает зону парковки, в которой нет препятствий, как парковочное место PS, из числа обнаруженных зон парковки. Напротив, когда в обнаруженной зоне парковки существует какое-либо препятствие, устройство 11 управления по настоящему варианту осуществления не обнаруживает эту зону парковки как парковочное место PS.
[0037]
Альтернативно, в дополнение к этому, устройство 11 управления настоящего варианта осуществления может определять, может ли рассматриваемое транспортное средство V1 быть припарковано в обнаруженной зоне парковки посредством автоматизированного (или автономного) вождения. Например, в случае, когда есть зона парковки, обращенная к стороне стены, и ширина проезда, необходимая для управления движением с помощью автоматизированного (или автономного) вождения, не может быть обеспечена, или в случае, когда есть зона парковки, окруженная столбами здания, и информация, необходимая для управления движением при автоматическом (или автономном) вождении, не может быть обнаружена, обнаруженная зона парковки не соответствует зоне парковки, в которой возможна парковка путем автоматизированного (или автономного) вождения. Затем, если определено, что в обнаруженной зоне парковки нет препятствий и возможна парковка посредством автоматизированного (или автономного) вождения, устройство 11 управления по настоящему варианту осуществления обнаруживает обнаруженную зону парковки как парковочное место PS. Напротив, когда определяется, что парковка посредством автоматизированного (или автономного) вождения невозможна, хотя в обнаруженной зоне парковки нет препятствий, устройство 11 управления в соответствии с настоящим вариантом осуществления не обнаруживает обнаруженную зону парковки как парковочное место PS.
[0038]
Чтобы обнаружить парковочное место PS, не всегда необходимо обнаруживать зону парковки. Когда определенная зона удовлетворяет заданным условиям, устройство 11 управления настоящего варианта осуществления может обнаруживать эту зону как парковочное место PS. Например, устройство 11 управления по настоящему варианту осуществления может обнаруживать зону в заданном диапазоне, в которой нет препятствий, и обнаруживать эту зону как парковочное место PS. Кроме того, устройство 11 управления согласно настоящему варианту осуществления может использовать информацию о прошлых поездках при обнаружении парковочного места PS.
[0039]
Функция отображения парковочного места устройства 11 управления согласно настоящему варианту осуществления является функцией, используемой для представления парковочного места PS водителю путем отображения парковочного места PS, обнаруженного устройством 11 управления, на дисплее 121. Устройство 11 управления согласно настоящему варианту осуществления использует функцию отображения парковочного места, чтобы представить водителю парковочное место PS, например, с рамкой из пунктирной линии, как проиллюстрировано на фиг. 3. Водитель выбирает парковочное место PS для парковки рассматриваемого транспортного средства V1 из парковочных мест PS, показанных на фиг. 3. Парковочное место PS может быть выбрано, например, касанием экрана дисплея 121.
[0040]
Функция вычисления маршрута парковки устройства 11 управления настоящего варианта осуществления является функцией, используемой для вычисления маршрута парковки от текущего положения до парковочного места PS, для парковки рассматриваемого транспортного средства V1 на выбранном парковочном месте PS. В частности, в случае, когда поворот рулевого колеса требуется в середине маршрута парковки, устройство 11 управления по настоящему варианту осуществления использует функцию вычисления маршрута парковки для установки положения поворота рулевого колеса, рулевого колеса рассматриваемое транспортное средство V1 поворачивается в положении поворота рулевого колеса, и формирует маршрут парковки для достижения парковочного места PS через положение поворота рулевого колеса из текущего положения рассматриваемого транспортного средства V1. Маршрут парковки, созданный устройством 11 управления настоящего варианта осуществления, является маршрутом, определяемым с учетом направления поворота, в которое поворачивается рассматриваемое транспортное средство V1 на маршруте от положения поворота рулевого колеса до парковочного места, и устанавливается в таком положении, в котором направление рулевого управления рассматриваемого транспортного средства V1 соответствует направлению поворота в то время, когда рассматриваемое транспортное средство остановлено в положении поворота рулевого колеса.
[0041]
Например, в сцене движения, в которой рассматриваемое транспортное средство V1 перемещается из текущего положения на парковочное место PS, чтобы припарковаться на парковочном месте PS, устройство 11 управления согласно сравнительному примеру настоящего изобретения вычисляет маршрут парковки, как показано на виде сверху на фиг. 6. То есть устройство 11 управления согласно сравнительному примеру настоящего изобретения обнаруживает ширину W проезда и другие транспортные средства V2 с помощью устройства 2 формирования изображения и устройства 4 определения дальности и вычисляет ширину W1 проезда, в котором рассматриваемое транспортное средство V1 может двигаться для перемещения из текущего положения на парковочное место PS через положение поворота рулевого колеса P. Затем устройство 11 управления устанавливает количество необходимых операций поворота рулевого колеса, устанавливает положение (положения) поворота рулевого колеса P, и вычисляет маршрут парковки для перемещения из текущего положения в парковочное место PS через положение поворота рулевого колеса P. Маршрут парковки, проиллюстрированный на фиг. 6, включает в себя участок Z-A, который представляет собой участок, на котором рассматриваемое транспортное средство V1 перемещается из текущего положения в положение поворота рулевого колеса P с постоянным углом рулевого управления, и участок Z-B, который представляет собой участок, на котором движется рассматриваемое транспортное средство V1 из положения поворота рулевого колеса P до парковочного места PS. В качестве движущегося перемещения рассматриваемое транспортное средство V1 выполняет статическое рулевое управление в положении поворота рулевого колеса P, чтобы ориентировать направление рулевого управления в сторону направления поворота.
[0042]
В маршруте парковки согласно сравнительному примеру настоящего изобретения время, необходимое для парковки, становится больше, поскольку рассматриваемое транспортное средство V1 удерживается в остановленном состоянии во время статического рулевого управления. Чтобы сократить время, необходимое для парковки, на маршруте парковки согласно сравнительному примеру настоящего изобретения, например, можно исключить статическое рулевое управление в положении поворота рулевого колеса и вместо этого ускорить движение перемещения для ориентации направления рулевого управления к направлению поворота на участке Z-B. Однако такое движение вызывает большое изменение движения рассматриваемого транспортного средства V1 во время ускорения, и, следовательно, ощущение несоответствия налагается на пассажира рассматриваемого транспортного средства V1. Кроме того, движение для ориентации направления рулевого управления в направлении поворота требует подавления скорости транспортного средства рассматриваемого транспортного средства V1 до тех пор, пока поворот не будет завершен.
[0043]
Как упомянуто выше, включение положения поворота рулевого колеса P в маршрут парковки заставляет рассматриваемое транспортное средство V1 останавливаться в положении поворота рулевого колеса P, чтобы изменить направление движения. Настоящий вариант осуществления отличается от сравнительного примера настоящего изобретения тем, что не выполняет управление движением для ориентации направления рулевого управления в сторону направления поворота во время ускоренного движения рассматриваемого транспортного средства V1, и отличается ориентацией направления рулевого управления в направлении направления поворота в процессе уменьшения скорости транспортного средства для остановки рассматриваемого транспортного средства V1. То есть устройство 11 управления настоящего варианта осуществления ориентирует направление рулевого управления в сторону направления поворота, когда рассматриваемое транспортное средство V1 снижает скорость транспортного средства до остановки (другими словами, до или непосредственно перед положением поворота рулевого колеса P), тем самым подавляя ощущение несоответствия, налагаемое на пассажира рассматриваемого транспортного средства V1, сокращая время, необходимое для поворота, и сокращая время, в течение которого скорость транспортного средства рассматриваемого транспортного средства V1 подавляется после операции поворота рулевого колеса.
[0044]
Например, в сцене движения, в которой рассматриваемое транспортное средство V1 перемещается из текущего положения в парковочное место PS, чтобы припарковаться на парковочном месте PS, устройство 11 управления настоящего варианта осуществления использует функцию вычисления маршрута парковки для вычисления маршрут парковки, проиллюстрированный на виде сверху на фиг. 7. Таким образом, устройство 11 управления в соответствии с настоящим вариантом осуществления определяет ширину W проезда и другие транспортные средства V2 с помощью устройства 2 формирования изображения и устройства 4 определения дальности и вычисляет ширину W1 проезда, по которому рассматриваемое транспортное средство V1 может двигаться для перемещения из текущего положения на парковочное место PS через положение поворота рулевого колеса P. Затем устройство 11 управления настоящего варианта осуществления устанавливает количество необходимых операций поворота рулевого колеса, устанавливает положение (положения) поворота рулевого колеса P и вычисляет маршрут парковки, по которому рассматриваемое транспортное средство V1 перемещается из текущего положения на парковочное место PS через положение поворота рулевого колеса P. Маршрут парковки, проиллюстрированный на фиг. 7 включает в себя первый участок Z1, который представляет собой участок от текущего положения рассматриваемого транспортного средства V1 до положения или непосредственно перед положением поворота рулевого колеса P, в котором рассматриваемое транспортное средство V1 движется с постоянным углом рулевого управления, второй участок Z2, который является участком, следующим за первым участком Z1 и предшествующим положению поворота рулевого колеса P, в который включено положение поворота рулевого колеса P, и третий участок Z3, который является участком, следующим за вторым участком Z2, на котором рассматриваемое транспортное средство V1 разворачивается в направлении движения к парковочному месту PS. На маршруте парковки, показанном на фиг. 7, рассматриваемое транспортное средство V1 движется с постоянным углом рулевого управления на первом участке Z1. Однако на маршруте парковки настоящего варианта осуществления рассматриваемое транспортное средство V1 не обязано двигаться с постоянным углом рулевого управления. Кроме того, на маршруте парковки настоящего варианта осуществления рассматриваемое транспортное средство V1 может двигаться с постоянным углом рулевого управления на третьем участке Z3.
[0045]
Что касается вычисления ширины W1 проезда, в котором может двигаться рассматриваемое транспортное средство V1, в сцене движения, показанной на фиг. 7, устройство 11 управления по настоящему варианту осуществления определяет ширину W проезда и препятствия вокруг рассматриваемого транспортного средства V1, например, с помощью устройства 2a формирования изображения, расположенного на передней части решетки радиатора транспортного средства, устройства 2b формирования изображения, расположенного под зеркалом левой двери транспортного средства, устройство 2c формирования изображения, расположенное под зеркалом правой двери транспортного средства, и устройство 2d формирования изображения, расположенное рядом с задним бампером транспортного средства, а также переднее устройство 4a определения дальности, боковое устройство 4b определения дальности и заднее устройство 4c определения дальности. Если препятствие не обнаружено, рассматриваемое транспортное средство V1 может перемещаться из текущего положения на парковочное место PS в пределах всей ширины проезда W. Напротив, в случае обнаружения любого препятствия рассматриваемое транспортное средство V1 может использовать только часть ширина проезда W для проезда. В сцене движения, показанной на фиг. 7, из-за присутствия других транспортных средств V2 в направлении движения рассматриваемого транспортного средства V1 ширина проезда, в котором рассматриваемое транспортное средство V1 может двигаться, чтобы переместиться из текущего положения на парковочное место PS, через положение поворота рулевого колеса P - W1.
[0046]
Что касается установки положения поворота рулевого колеса P, устройство 11 управления настоящего варианта осуществления устанавливает положение поворота рулевого колеса P, используя по меньшей мере одну из ширины W1 проезда, в котором может двигаться рассматриваемое транспортное средство V1. для перемещения из текущего положения в парковочное место PS через положение поворота рулевого колеса P, вычисленное функцией расчета маршрута парковки, минимальный радиус поворота рассматриваемого транспортного средства V1, скорость рулевого управления рассматриваемого транспортного средства V1 и скорость транспортного средства рассматриваемого транспортного средства V1. Кроме того, при установке положения поворота рулевого колеса P устройство 11 управления настоящего варианта осуществления может использовать всю длину и всю ширину рассматриваемого транспортного средства V1. Ширина W1 проезда, в котором может двигаться рассматриваемое транспортное средство V1, и минимальный радиус поворота, вся длина и вся ширина рассматриваемого транспортного средства V1 фиксируются в заданных значениях в зависимости от сцены движения и рассматриваемого транспортного средства V1. Напротив, скорость рулевого управления рассматриваемого транспортного средства V1 и скорость транспортного средства рассматриваемого транспортного средства V1 могут быть установлены на соответствующие значения в пределах заданного диапазона.
[0047]
Например, устройство 11 управления настоящего варианта осуществления устанавливает положение поворота рулевого колеса P таким образом, чтобы минимизировать время, необходимое для перемещения рассматриваемого транспортного средства V1 из текущего положения на парковочное место PS. Например, даже в случае, когда только одна операция поворота рулевого колеса позволяет рассматриваемому транспортному средству V1 перемещаться из текущего положения на парковочное место PS, если движение, включающее в себя три операции поворота рулевого колеса, может сократить время, необходимое для завершения движения устройство 11 управления по настоящему варианту осуществления устанавливает три положения поворота рулевого колеса P. В качестве альтернативы устройство 11 управления по настоящему варианту осуществления может устанавливать положение поворота рулевого колеса P таким образом, чтобы минимизировать количество операций поворота рулевого колеса, необходимое для того, чтобы рассматриваемое транспортное средство V1 переместилось из текущего положения на парковочное место PS. После завершения настроек в отношении текущего положения рассматриваемого транспортного средства V1, положения поворота рулевого колеса P и парковочного места PS устройство 11 управления согласно настоящему варианту осуществления может рассчитать маршрут парковки.
[0048]
Маршрут на втором участке Z2 настоящего варианта осуществления является маршрутом, определенным с учетом направления поворота рассматриваемого транспортного средства V1 на третьем участке Z3, ориентированного в сторону парковочного места PS из положения поворота рулевого колеса P, и установлен в так что, направление рулевого управления рассматриваемого транспортного средства V1 соответствует направлению поворота в то время, когда рассматриваемое транспортное средство V1 остановлено в положении поворота рулевого колеса P. Направление рулевого управления - это, например, ориентация угла поворота рулевого колеса рассматриваемого транспортного средства V1, или ориентация передних колес рассматриваемого транспортного средства V1, обращенных вперед рассматриваемого транспортного средства V1. Например, в сцене движения, показанной на фиг. 7, в конечной точке первого участка Z1 ориентация угла поворота рулевого колеса рассматриваемого транспортного средства V1, движущегося вперед, и ориентация передних колес рассматриваемого транспортного средства V1, обращенных вперед рассматриваемого транспортного средства V1, направлены налево. Напротив, на третьем участке Z3, следующим за положением поворота рулевого колеса P, ориентация угла поворота рулевого колеса рассматриваемого транспортного средства V1, движущегося назад, и ориентация передних колес рассматриваемого транспортного средства V1, обращенных вперед рассматриваемого транспортного средства V1 направлены направо. В этом случае устройство 11 управления согласно настоящему варианту осуществления определяет, что необходимо переключить направление рулевого управления слева направо до и после положения поворота рулевого колеса P, и вычисляет маршрут на втором участке Z2 таким образом, что ориентация угла поворота рулевого колеса рассматриваемого транспортного средства V1 или ориентация передних колес рассматриваемого транспортного средства V1, обращенных вперед рассматриваемого транспортного средства V1, направлена направо, например, когда рассматриваемое транспортное средство V1 останавливается в положении поворота рулевого колеса P. Это может подавить такое движение, которое создает ощущение несоответствия у пассажира рассматриваемого транспортного средства V1. Кроме того, время, необходимое для поворота, может быть сокращено, и время, в течение которого скорость транспортного средства рассматриваемого транспортного средства V1 подавляется после операции поворота рулевого колеса, может быть сокращено.
[0049]
Маршрут на втором участке Z2 настоящего варианта осуществления будет достаточным, если направление рулевого управления рассматриваемого транспортного средства V1, движущегося по этому маршруту, соответствует направлению поворота в то время, когда рассматриваемое транспортное средство V1 останавливается в положении поворота рулевого колеса P. В качестве альтернативы, угол рулевого управления рассматриваемого транспортного средства V1 в то время, когда рассматриваемое транспортное средство V1 остановлено в положении поворота рулевого колеса P, может быть установлен равным углу рулевого управления рассматриваемого транспортного средства V1, которое начинает движение из положение поворота рулевого колеса P в сторону парковочного места PS на третьем участке. В результате, нет необходимости изменять направление рулевого управления, когда рассматриваемое транспортное средство V1 начинает ускорение из остановленного состояния, и, следовательно, нет необходимости подавлять скорость транспортного средства рассматриваемого транспортного средства V1 до тех пор, пока поворот не будет завершен.
[0050]
Кроме того, устройство 11 управления настоящего варианта осуществления может увеличивать и уменьшать длину второго участка Z2 в соответствии с шириной W1 проезда, в котором может двигаться рассматриваемое транспортное средство V1. Например, сцена движения, показанная на фиг. 8 такая же, как сцена движения, проиллюстрированная на фиг. 7, за исключением того, что ширина W1 проезда, в котором может перемещаться рассматриваемое транспортное средство V1, уже, чем ширина W1 на фиг. 7. В этом случае устройство 11 управления настоящего варианта осуществления использует функцию вычисления маршрута парковки для вычисления маршрута парковки, показанного на виде сверху на фиг. 8, на котором длина второго участка Z2 установлена меньшей, чем длина второго участка Z2, показанного на фиг. 7. Увеличение и уменьшение длины второго участка Z2, показанного на фиг. 8, возможно путем изменения скорости рулевого управления рассматриваемого транспортного средства V1 и/или скорости транспортного средства рассматриваемого транспортного средства V1 . Например, сокращение длины второго участка Z2 может быть достигнуто за счет увеличения скорости рулевого управления рассматриваемого транспортного средства V1 и/или уменьшения скорости транспортного средства рассматриваемого транспортного средства V1. Напротив, увеличение длины второго участка Z2 может быть достигнуто за счет уменьшения скорости рулевого управления рассматриваемого транспортного средства V1 и/или увеличения скорости транспортного средства рассматриваемого транспортного средства V1 . В качестве альтернативы, длина второго участка Z2 может быть заранее укорочена и впоследствии увеличена в середине процесса помощи при парковке, или длина может быть увеличена и уменьшена во время управления системой помощи при парковке.
[0051]
Кроме того, в случае, когда количество необходимых операций поворота рулевого колеса равно двум или более, маршрут на втором участке Z2 настоящего варианта осуществления может задаваться каждый раз, когда рассматриваемое транспортное средство V1 разворачивается. Например, сцены движения, показанные на фиг. 9A-9D, такие же, как сцены движения, проиллюстрированные на фиг. 7 и 8, за исключением того, что ширина W1 проезда, по которому может перемещаться рассматриваемое транспортное средство V1, уже, чем ширина W1 на фиг. 8. В этом случае устройство 11 управления настоящего варианта осуществления использует функцию расчета маршрута парковки для установки трех положений поворота рулевого колеса Pa на Pc, так что рассматриваемое транспортное средство V1 может перемещаться из текущего положения в парковочное место PS, а затем вычисляет маршрут во втором участке Z2 настоящего варианта осуществления при каждой из первой и второй операций поворота рулевого колеса.
[0052]
То есть в сцене движения по фиг. 9A, устройство 11 управления согласно настоящему варианту осуществления определяет ширину W проезда и других транспортных средств V2 с помощью устройства 2 формирования изображения и устройства 4 определения дальности и вычисляет ширину W1 проезда, в котором рассматриваемое транспортное средство V1 может двигаться для перемещения из текущее положения на парковочное место PS через положение поворота рулевого колеса P. В сцене движения на фиг. 9A, поскольку ширина W1 проезда, в котором может двигаться рассматриваемое транспортное средство V1, мала, рассматриваемое транспортное средство V1 не может напрямую перемещаться на парковочное место PS посредством одной операции поворота рулевого колеса. Следовательно, устройство 11 управления настоящего варианта осуществления устанавливает второе положение поворота рулевого колеса Pb, показанное на фиг. 9В, после установки первого положения поворота рулевого колеса Ра. Во второй операции поворота рулевого колеса рассматриваемое транспортное средство V1 перемещается назад, чтобы перейти в положение поворота рулевого колеса Pb. В этом случае, поскольку никакое другое транспортное средство V2 не обнаруживается как препятствие, устройство 11 управления согласно настоящему варианту осуществления вычисляет ширину W проезда как ширину W2 проезда, в котором может двигаться рассматриваемое транспортное средство. Кроме того, после установки второго положения поворота рулевого колеса Pb, устройство 11 управления настоящего варианта осуществления устанавливает третье положение поворота рулевого колеса Pc, показанное на фиг. 9C. Подобно второй операции поворота рулевого колеса, поскольку никакое другое транспортное средство V2 не обнаруживается как препятствие даже при третьей операции поворота рулевого колеса, устройство 11 управления по настоящему варианту осуществления вычисляет ширину W проезда как ширину W2 проезда, в котором может двигаться рассматриваемое транспортное средство. Затем устройство 11 управления настоящего варианта осуществления вычисляет маршрут парковки, по которому рассматриваемое транспортное средство V1 может перемещаться из текущего положения на парковочное место PS через положения поворота рулевого колеса Pa, Pb и Pc.
[0053]
Устройство 11 управления согласно настоящему варианту осуществления вычисляет маршрут парковки для обеспечения возможности перемещения рассматриваемого транспортного средства V1 из текущего положения в положение поворота рулевого колеса Pa, показанное на фиг. 9А. Маршрут парковки, показанный на фиг. 9A включает в себя первый участок Z1a и второй участок Z2a. Маршрут на втором участке Z2a - это маршрут, определяемый с учетом направления поворота рассматриваемого транспортного средства V1, перемещающегося из положения поворота рулевого колеса Pa в положению поворота рулевого колеса Pb, и задается таким образом, что направление рулевого управления рассматриваемого транспортного средства V1 соответствует направлению поворота в то время, когда рассматриваемое транспортное средство V1 остановлено в положении поворота рулевого колеса Pa. В этом случае устройство 11 управления настоящего варианта осуществления определяет, что необходимо переключить направление рулевого управления слева направо до и после положения поворота рулевого колеса Pa, и вычисляет маршрут на втором участке Z2a таким образом, что ориентация угла поворота рулевого колеса рассматриваемого транспортного средства V1 или ориентация передних колес рассматриваемого транспортного средства V1, обращенных вперед рассматриваемого транспортного средства V1, была направлена вправо, например, когда рассматриваемое транспортное средство V1 остановлено в положении поворота рулевого колеса Pa.
[0054]
Устройство 11 управления согласно настоящему варианту осуществления вычисляет маршрут парковки для обеспечения возможности перемещения рассматриваемого транспортного средства V1 из положения поворота рулевого колеса Pa в положение поворота рулевого колеса Pb, показанного на фиг. 9B. Маршрут парковки, показанный на фиг. 9B включает в себя первый участок Z1b и второй участок Z2b. Маршрут на втором участке Z2b - это маршрут, определяемый с учетом направления поворота рассматриваемого транспортного средства V1, перемещающегося из положения поворота рулевого колеса Pb в положение поворота рулевого колеса Pc, и задается таким образом, что направление рулевого управления рассматриваемого транспортного средства V1 соответствует направлению поворота в то время, когда рассматриваемое транспортное средство V1 остановлено в положении поворота рулевого колеса Pb. В этом случае устройство 11 управления настоящего варианта осуществления определяет, что необходимо переключить направление рулевого управления справа налево до и после положения поворота рулевого колеса Pb, и вычисляет маршрут на втором участке Z2b таким образом, что ориентация угла поворота рулевого колеса рассматриваемого транспортного средства V1 или ориентация передних колес рассматриваемого транспортного средства V1, обращенных вперед рассматриваемого транспортного средства V1, направлена влево, например, когда рассматриваемое транспортное средство V1 остановлено в положении поворота рулевого колеса Pb.
[0055]
Устройство 11 управления согласно настоящему варианту осуществления вычисляет маршрут парковки для обеспечения возможности перемещения рассматриваемого транспортного средства V1 из положения поворота рулевого колеса Pb в положение поворота рулевого колеса Pc, показанного на фиг. 9C. Маршрут парковки, показанный на фиг. 9C состоит из первого участка Z1c. В этом случае рассматриваемое транспортное средство V1 может перемещаться из положения поворота рулевого колеса Pb в положение поворота рулевого колеса Pc с постоянным углом рулевого управления, и никакого рулевого управления в положении поворота рулевого колеса Pc не требуется. Соответственно, нет необходимости устанавливать второй участок Z2 настоящего варианта осуществления. Затем устройство 11 управления настоящего варианта осуществления вычисляет маршрут парковки, чтобы разрешить рассматриваемому транспортному средству V1 перемещаться назад и прямо из положения поворота рулевого колеса Pc на парковочное место PS, показанное на фиг. 9D. Маршрут парковки, показанный на фиг. 9D состоит из третьего участка Z3.
[0056]
Кроме того, устройство 11 управления настоящего варианта осуществления может обеспечивать помощь при парковке даже при параллельной парковке. Например, даже в сцене движения, показанной на фиг. 10, на которой рассматриваемое транспортное средство V1 собирается параллельно припарковаться на парковочном месте PS между другими транспортными средствами V2g и V2h, устройство 11 управления настоящего варианта осуществления использует функцию вычисления маршрута парковки для вычисления маршрута парковки. То есть устройство 11 управления в соответствии с настоящим вариантом осуществления определяет ширину W проезда и других транспортных средств V2g и V2h с помощью устройства 2 формирования изображения и устройства 4 определения дальности и вычисляет ширину W1 проезда, в котором рассматриваемое транспортное средство V1 может двигаться для перемещения из текущего положения на парковочное место PS через положение поворота рулевого колеса P. На фиг. 10 ширина W1 проезда, в котором может двигаться рассматриваемое транспортное средство V1, равна обнаруженной ширине W.
[0057]
Затем устройство 11 управления настоящего варианта осуществления устанавливает количество необходимых операций поворота рулевого колеса, устанавливает положения поворота рулевого колеса P и вычисляет маршрут парковки, по которому рассматриваемое транспортное средство V1 перемещается из текущего положения на парковочное место PS через положение поворота рулевого колеса P. В сцене движения параллельной парковки, показанной на фиг. 10, устройство 11 управления по настоящему варианту осуществления устанавливает одно положение поворота рулевого колеса P. Затем устройство 11 управления по настоящему варианту осуществления вычисляет маршрут парковки для движения от текущего положения до парковочного места PS через положение поворот рулевого колеса P. Маршрут парковки для параллельной парковки, показанный на фиг. 10 включает в себя первый участок Z1, второй участок Z2 и третий участок Z3. В этой параллельной парковке направление рулевого управления рассматриваемого транспортного средства V1 переключается слева направо до и после положения поворота рулевого колеса P. Следовательно, устройство 11 управления вычисляет маршрут на втором участке Z2 так что,, направление рулевого управления рассматриваемого транспортного средства V1 изменяется вправо, когда рассматриваемое транспортное средство V1 остановлено в положении поворота рулевого колеса P.
[0058]
Функция планирования перемещения при движении устройства 11 управления в соответствии с настоящим вариантом осуществления представляет собой функцию планирования перемещения при движении, которая позволяет парковать рассматриваемое транспортное средство V1 в парковочном месте PS вдоль маршрута парковки, вычисленного функцией вычисления маршрута парковки. Устройство 11 управления настоящего варианта осуществления использует функцию планирования перемещения при движении, чтобы планировать управление скоростью транспортного средства и углом рулевого управления рассматриваемого транспортного средства V1 так что, рассматриваемое транспортное средство V1 перемещается на парковочное место PS вдоль маршрута парковки.
[0059]
Фиг. 11 - это временная диаграмма, иллюстрирующая план движения при движении в случае, когда рассматриваемое транспортное средство V1 перемещается из текущего положения на парковочное место PS, например, вдоль маршрута парковки согласно сравнительному примеру настоящего изобретения, показанному на фиг. 6. Фиг. 11 (A) - временная диаграмма скорости транспортного средства, а фиг. 11 (B) - временная диаграмма угла рулевого управления. На фиг. 11 (A) горизонтальная ось представляет время, а вертикальная ось представляет скорость транспортного средства. Когда скорость транспортного средства является положительной величиной, рассматриваемое транспортное средство V1 перемещается вперед. Когда скорость транспортного средства является отрицательной величиной, рассматриваемое транспортное средство V1 перемещается назад. Горизонтальная ось на фиг. 11 (B) представляет время и соответствует горизонтальной оси на фиг. 11 (А). Вертикальная ось на фиг. 11 (B) представляет угол рулевого управления. Когда угол поворота является положительным, рассматриваемое транспортное средство V1 поворачивает налево. Когда угол рулевого управления имеет отрицательное значение, рассматриваемое транспортное средство V1 поворачивает направо.
[0060]
Маршрут парковки, показанный на фиг. 6 включает в себя участок Z-A, в котором рассматриваемое транспортное средство V1 перемещается из текущего положения в положение поворота рулевого колеса P, положение поворота рулевого колеса P, в котором рассматриваемое транспортное средство V1 выполняет статическое рулевое управление, и участок ZB, на котором рассматриваемое транспортное средство V1 перемещается из положения поворота рулевого колеса P на парковочное место PS. На фиг. 11, скорость транспортного средства и угол рулевого управления на участке TA, скорость транспортного средства и угол рулевого управления на участке TB, а также скорость транспортного средства и угол рулевого управления на участке TC соответствуют перемещению рассматриваемого транспортного средства V1 на участке ZA, статическое рулевое управление рассматриваемого транспортного средства V1 в положении поворота рулевого колеса P и движение при перемещении рассматриваемого транспортного средства V1 на участка ZB, соответственно. На маршруте парковки согласно сравнительному примеру настоящего изобретения из-за статического рулевого управления, выполняемого на участка TB, рассматриваемое транспортное средство V1 удерживается в остановленном состоянии, в то время как направление рулевого управления ориентировано в сторону направления поворота. Соответственно, для завершения движения перемещения требуется время. Операция статического рулевого управления вызывает износ колес и выделение тепла в приводе рулевого управления, что создает нагрузку на рассматриваемое транспортное средство V1.
[0061]
Напротив, устройство 11 управления настоящего варианта осуществления создает план движения при перемещении, показанный на временной диаграмме на фиг. 12, например, когда рассматриваемое транспортное средство V1 перемещается из текущего положения на парковочное место PS вдоль маршрута парковки настоящего варианта осуществления, проиллюстрированного на фиг. 7. Метод обозначения скорости транспортного средства на фиг. 12 (A) и угол рулевого управления на фиг. 12 (B) соответствует таковому на фиг. 11 (A) и фиг. 11 (В).
[0062]
Маршрут парковки, показанный на фиг. 7 включает в себя первый участок Z1, второй участок Z2 и третий участок Z3. На фиг. 12, скорость транспортного средства и угол рулевого управления на участке T1, скорость транспортного средства и угол рулевого управления на участке T2, а также скорость транспортного средства и угол рулевого управления на участке T3 соответствуют движению при перемещении рассматриваемого транспортного средства V1 на первом участок Z1, показанном на фиг. 7, движению при перемещении рассматриваемого транспортного средства V1 на втором участке Z2, показанном на фиг. 7, и движению при перемещении рассматриваемого транспортного средства V1 на третьем участке Z3, показанном на фиг. 7 соответственно. На маршруте парковки, показанном на фиг. 7, поворот слева направо происходит до того, как скорость транспортного средства станет 0 в положении поворота рулевого колеса P, то есть до того, как рассматриваемое транспортное средство V1 будет остановлено. Следовательно, нет необходимости выполнять статическое рулевое управление, необходимое на маршруте парковки, согласно сравнительному примеру настоящего изобретения. Рассматриваемое транспортное средство V1 может быстро начать перемещение назад после остановки в положении поворота рулевого колеса P. Это может сократить время, необходимое для парковки. Кроме того, поскольку при ускорении на участке T3 на фиг. 12 не требуется поворот, ускорение на более высоком уровне, чем на фиг. 11, возможно на участке T3. Таким образом можно сократить время, необходимое для парковки.
[0063]
Кроме того, устройство 11 управления настоящего варианта осуществления создает план движения при перемещении, показанный на временной диаграмме фиг. 13, например, когда рассматриваемое транспортное средство V1 перемещается из текущего положения на парковочное место PS вдоль маршрута парковки настоящего варианта осуществления, показанного на фиг. 8. Способ обозначения скорости транспортного средства на фиг. 13 (A) и угол рулевого управления по фиг. 13 (B) соответствует таковому на фиг. 11 (A) и фиг. 11 (В).
[0064]
Маршрут парковки, показанный на фиг. 8 аналогичен маршруту парковки, показанному на фиг. 7, включая первый участок Z1, второй участок Z2 и третий участок Z3, но второй участок Z2, показанный на фиг. 8 короче второго участка Z2, показанного на фиг. 7. На фиг. 13, скорость транспортного средства и угол рулевого управления на участке T4, скорость транспортного средства и угол рулевого управления на участке T5, а также скорость транспортного средства и угол рулевого управления на участке T6 соответствуют движению при перемещении рассматриваемого транспортного средства V1 на первом участке Z1, показанном на фиг. 8, и движение при перемещении рассматриваемого транспортного средства V1 на втором участке Z2, показанном на фиг. 8, и движение при перемещении рассматриваемого транспортного средства V1 на третьем участке Z3, показанном на фиг. 8 соответственно. План движения при перемещении, проиллюстрированный на фиг. 13 совпадает с планом движения при перемещении на фиг. 12, кроме участка Т5. В плане движения при перемещении, показанном на фиг. 13, чтобы сократить длину второго участка Z2, на участке T5 предполагается останавливать рассматриваемое транспортное средство V1 с ускорением, большим, чем на участке T2 на фиг. 12 и выполнить поворот на более высокой скорости рулевого управления. Это может сократить длину второго участка Z2, показанного на фиг. 8 по сравнению с длиной второго участка Z2, показанного на фиг. 7. Поскольку план движения при перемещении, проиллюстрированный на фиг. 13, включает в себя участок T5, который короче, чем участок T2, время, необходимое для парковки, может быть сокращено по сравнению с планом движения, показанным на фиг. 12.
[0065]
Далее будет описан процесс помощи при парковке устройством 11 управления согласно настоящему варианту осуществления со ссылкой на фиг. с 14 по 15. Фиг. 14 - примерная блок-схема, иллюстрирующая базовый процесс помощи при парковке настоящего варианта осуществления. Фиг. 15 - блок-схема, иллюстрирующая примерную подпрограмму этапа S6 на фиг. 14. Устройство 11 управления выполняет обработку управления перемещением, описанную ниже, через заданные интервалы времени. В нижеследующем описании предполагается, что устройство 11 управления настоящего варианта осуществления обращается к информации, относящейся к окружающей среде, при определении сцены движения, в которой рассматриваемое транспортное средство V1 припарковано на парковочном месте PS, и выполняет программы помощи при парковке.
[0066]
На этапе S1 по фиг. 14, устройство 11 управления согласно настоящему варианту осуществления использует функцию сбора информации об окружающей среде, чтобы отображать окружающую среду рассматриваемого транспортного средства с помощью устройства 2 формирования изображения, и получает данные изображения, включая каждое препятствие, существующее вокруг рассматриваемого транспортного средства. Кроме того, на этапе S1 устройство 11 управления настоящего варианта осуществления использует функцию сбора информации об окружающей среде для обнаружения любого препятствия, пешехода или другого транспортного средства вокруг рассматриваемого транспортного средства V1, положения каждого объекта и расстояния до каждого объекта с устройством 4 определения дальности.
[0067]
На этапе S2 устройство 11 управления настоящего варианта осуществления использует функцию обнаружения парковочного места, чтобы заставить устройство 3 обработки изображений создавать изображение IM1 с высоты птичьего полета из изображений, полученных устройством 2 формирования изображения. На этапе S3 устройство 11 управления настоящего варианта осуществления использует функцию обнаружения парковочного места, чтобы обнаруживать зону парковки по изображению IM1 с высоты птичьего полета и обнаруживать парковочного места PS из зоны парковки с помощью устройства 2 формирования изображения и устройства 4 определения дальности.
[0068]
На этапе S4 устройство 11 управления согласно настоящему варианту осуществления использует функцию отображения парковочного места, чтобы представить водителю парковочные места PS с помощью дисплея 121. На этапе S5 устройство 11 управления согласно настоящему варианту осуществления определяет, выбрал ли водитель какое-либо парковочное место PS, на котором рассматриваемое транспортное средство V1 должно быть припарковано, из числа парковочных мест PS. Если водитель не выбрал какое-либо парковочное место PS, на котором должно быть припарковано рассматриваемое транспортное средство V1, из числа парковочных мест PS (НЕТ на этапе S5), обработка возвращается к этапу S4, на котором устройство 11 управления настоящего варианта осуществления представляет водителю парковочные места PS. Напротив, когда водитель выбрал парковочное место PS, в котором рассматриваемое транспортное средство V1 должно быть припарковано, из числа парковочных мест PS (ДА на этапе S5), обработка переходит к этапу S6.
[0069]
На этапе S6 устройство 11 управления согласно настоящему варианту осуществления использует функцию вычисления маршрута парковки, чтобы вычислить маршрут парковки для обеспечения возможности перемещения рассматриваемого транспортного средства V1 из текущего положения в парковочное место PS, выбранное водителем. На этапе S7 устройство 11 управления согласно настоящему варианту осуществления использует функцию планирования движения при перемещении для планирования движения при перемещении рассматриваемого транспортного средства V1, подлежащего парковке, вдоль вычисленного маршрута парковки. Затем, на этапе S8, устройство 11 управления согласно настоящему варианту осуществления выполняет помощь при парковке для рассматриваемого транспортного средства V1, чтобы реализовать запланированное движение по рассчитанному маршруту парковки, используя контроллер 5 транспортного средства, приводную систему 6, скорость транспортного средства датчик 7 и датчик 8 угла рулевого управления.
[0070]
Затем примерная подпрограмма этапа S6 на фиг. 14 будет описана со ссылкой на фиг. 15.
[0071]
На этапе S61 по фиг. 15, устройство 11 управления настоящего варианта осуществления использует функцию вычисления маршрута парковки для обнаружения ширины W проезда и любого препятствия, такого как другое транспортное средство V2, с помощью устройства 2 формирования изображения и устройства 4 определения дальности. На этапе S62 устройство 11 управления настоящего варианта осуществления использует функцию вычисления маршрута парковки для вычисления ширины W1 или W2 проезда, по которому может двигаться рассматриваемое транспортное средство.
[0072]
На этапе S63 устройство 11 управления согласно настоящему варианту осуществления использует функцию вычисления маршрута парковки, чтобы установить количество операций поворота рулевого колеса с использованием по меньшей мере одного из ширины W1 проезда, в котором может двигаться рассматриваемое транспортное средство V1, или минимального радиуса поворота рассматриваемого транспортного средства V1, скорости рулевого управления рассматриваемого транспортного средства V1 и скорости транспортного средства рассматриваемого транспортного средства V1. Кроме того, на этапе S64 устройство 11 управления согласно настоящему варианту осуществления использует функцию вычисления маршрута парковки для установки каждого положения поворота рулевого колеса P со ссылкой на количество установленных операций поворота рулевого колеса.
[0073]
На этапе S65 устройство 11 управления согласно настоящему варианту осуществления использует функцию вычисления маршрута парковки для определения направления поворота в положении поворота рулевого колеса. На этапе S66 устройство 11 управления согласно настоящему варианту осуществления использует функцию вычисления маршрута парковки для вычисления маршрута от текущего положения до положения поворота рулевого колеса P, в котором направление рулевого управления рассматриваемого транспортного средства V1 соответствует направлению поворота, основанное на заданном положении поворота рулевого колеса P и заданном направлении поворота. Если заданы два или более положения поворота рулевого колеса, то на этапе S67 устройство 11 управления настоящего варианта осуществления использует функцию вычисления маршрута парковки для вычисления маршрута от положения поворота рулевого колеса до следующего положения поворота рулевого колеса, в котором направление рулевого управления рассматриваемого транспортного средства V1 соответствует направлению поворота. На фиг. 15 этап S67 обозначен пунктирной линией, поскольку это произвольный этап. Затем, на этапе S68, устройство 11 управления согласно настоящему варианту осуществления использует функцию вычисления маршрута парковки для вычисления маршрута от положения поворота рулевого колеса до парковочного места.
[0074]
На этапе S69 устройство 11 управления согласно настоящему варианту осуществления определяет, был ли вычислен маршрут парковки для обеспечения возможности перемещения рассматриваемого транспортного средства V1 из текущего положения в парковочное место PS с помощью функции вычисления маршрута парковки. Если маршрут парковки для обеспечения возможности перемещения рассматриваемого транспортного средства V1 из текущего положения в парковочное место PS был вычислен (ДА на этапе S69), обработка переходит к этапу S7 на фиг. 14, в котором устройство 11 управления согласно настоящему варианту осуществления использует функцию планирования движения при перемещении, чтобы планировать движение рассматриваемого транспортного средства V1 таким образом, чтобы оно было припарковано вдоль вычисленного маршрута парковки. Напротив, когда маршрут парковки для обеспечения возможности перемещения рассматриваемого транспортного средства V1 из текущего положения на парковочное место PS не был вычислен (НЕТ на этапе S69), обработка возвращается к этапу S63, на котором устройство 11 управления из настоящий вариант осуществления использует функцию вычисления маршрута парковки, чтобы снова установить количество операций поворота рулевого колеса.
[0075]
Как описано выше, в устройстве 1 помощи при парковке и способе помощи при парковке согласно настоящему варианту осуществления обнаруживается парковочное место PS рассматриваемого транспортного средства V1, положение поворота рулевого колеса, при этом рулевое колесо поворачивается в положении поворота рулевого колеса P, создается маршрут парковки для достижения от текущего положения рассматриваемого транспортного средства V1 до парковочного места PS через положение поворота рулевого колеса P, и рассматриваемое транспортное средство V1 управляется таким образом, чтобы для автономного движения по маршруту парковки. Маршрут парковки включает в себя маршрут от текущего положения рассматриваемого транспортного средства V1 до положения поворота рулевого колеса P, которое определяется с учетом направления поворота, в которое поворачивается рассматриваемое транспортное средство V1 на маршруте движения из положения поворота рулевое колесо P на парковочное место PS и устанавливается таким образом, что направление рулевого управления рассматриваемого транспортного средства V1 соответствует направлению поворота в то время, когда рассматриваемое транспортное средство V1 остановлено в положении поворота рулевого колеса P. Соответственно , направление рулевого управления ориентировано в сторону направления поворота, когда рассматриваемое транспортное средство V1 снижает скорость транспортного средства до остановки. Это может подавить ощущение несоответствия, налагаемое на пассажира движением рассматриваемого транспортного средства V1. Кроме того, можно подавить величину статического рулевого управления, когда рассматриваемое транспортное средство V1 поворачивает, сократить время, необходимое для поворота, и сократить время, необходимое для парковки. Кроме того, направление рулевого управления рассматриваемого транспортного средства V1 уже ориентировано на направление поворота в то время, когда рассматриваемое транспортное средство V1 остановлено для поворота рулевого колеса (ограничения угла поворота колеса). Следовательно, количество поворота, необходимое после достижения положения поворота рулевого колеса, может быть ограничено. Кроме того, подавление величины поворота, необходимой после достижения положения поворота рулевого колеса, может сократить время, в течение которого подавляется скорость транспортного средства рассматриваемого транспортного средства V1, и, соответственно, сократить время, необходимое для парковки.
[0076]
Кроме того, в устройстве 1 помощи при парковке и способе помощи при парковке согласно настоящему варианту осуществления угол рулевого управления рассматриваемого транспортного средства V1 в то время, когда рассматриваемое транспортное средство V1 остановлено в положении поворота рулевого колеса P, устанавливается равным углу рулевого управления, когда рассматриваемое транспортное средство V1 начинает движение к парковочному месту PS из положения поворота рулевого колеса P. Это может сократить время, необходимое для парковки, поскольку нет необходимости переключать направление рулевого управления, когда рассматриваемое транспортное средство V1 начинает ускоряться из остановленного состояния, и нет необходимости подавлять скорость транспортного средства рассматриваемого транспортного средства V1, являющегося предметом исследования, до тех пор, пока поворот не будет завершен. Кроме того, даже когда рассматриваемое транспортное средство V1 остановлено в положении за пределами положения поворота рулевого колеса P, поскольку рассматриваемое транспортное средство V1 существует на маршруте третьего участка Z3, нет необходимости переключать направление рулевого управления, когда рассматриваемое транспортное средство V1 начинает ускоряться из остановленного состояния.
[0077]
Кроме того, в устройстве 1 помощи при парковке и способе помощи при парковке согласно настоящему варианту осуществления маршрут парковки включает в себя по меньшей мере первый участок Z1, который представляет собой участок от текущего положения рассматриваемого транспортного средства V1 до положения перед положением поворота рулевого колеса P, при котором рассматриваемое транспортное средство перемещается с постоянным углом рулевого управления, второй участок Z2, который является участком, следующим за первым участком Z1 и предшествующим положению поворота рулевого колеса P, в котором положение поворота рулевого колеса P включено, и третий участок Z3, который является участком, следующим за вторым участком Z2, в котором рассматриваемое транспортное средство V1 поворачивается в направлении перемещения к парковочному месту PS. Это может подавить чувство несоответствия, налагаемое на пассажира, и сократить время, необходимое для парковки, и, следовательно, маршрут парковки может быть соответствующим образом рассчитан.
[0078]
Кроме того, в устройстве 1 помощи при парковке и способе помощи при парковке согласно настоящему варианту осуществления длина второго участка Z2 устанавливается относительно меньшей, когда ширина W1 проезда позволяет рассматриваемому транспортному средству V1 двигаться для перемещения от текущего положения рассматриваемого транспортного средства до парковочного места PS через положение поворота рулевого колеса P, является узким по сравнению со случаем, когда ширина W1 проезда является широкой. Таким образом, даже когда ширина W1 проезда мала, можно подавить величину статического рулевого управления, когда рассматриваемое транспортное средство V1 поворачивает, сократить время, необходимое для поворота, и сократить время, необходимое для парковки. Кроме того, даже когда ширина W1 проезда мала, можно подавить величину поворота, необходимую после достижения положения поворота рулевого колеса, сократить время, в течение которого подавляется скорость транспортного средства рассматриваемого транспортного средства V1, являющегося предметом исследования, и сократить время, необходимое для парковки.
[0079]
Кроме того, в устройстве 1 помощи при парковке и способе помощи при парковке согласно настоящему варианту осуществления длина второго участка Z2 устанавливается относительно меньшей, когда ширина W1 проезда, в котором рассматриваемое транспортное средство V1 может двигаться для перемещения из текущего положения на парковочное место PS через положение поворота рулевого колеса P, меньше заданного значения по сравнению со случаем, когда ширина W1 проезда равна или больше заданного значения. Таким образом, даже когда ширина W1 проезда мала, можно подавить величину статического рулевого управления, когда рассматриваемое транспортное средство V1 поворачивает, сократить время, необходимое для поворота, и сократить время, необходимое для парковки. Кроме того, даже когда ширина W1 проезда мала, можно подавить величину поворота, необходимую после достижения положения поворота рулевого колеса, сократить время, в течение которого подавляется скорость транспортного средства рассматриваемого транспортного средства V1, являющегося предметом исследования, и сократить время, необходимое для парковки. Заданное значение, которое должно быть установлено заранее для ширины W1 проезда, может быть установлено равным соответствующему значению с использованием минимального радиуса поворота, всей длины и всей ширины рассматриваемого транспортного средства V1 или тому подобного.
[0080]
Кроме того, в устройстве 1 помощи при парковке и способе помощи при парковке согласно настоящему варианту осуществления, чем уже ширина W1 проезда, в котором рассматриваемое транспортное средство V1 может двигаться, чтобы перемещаться из текущего положения на парковочное место PS через положение поворота рулевого колеса P, тем короче заданная длина второго участка Z2. Это может подавлять величину статического рулевого управления, когда рассматриваемое транспортное средство V1 поворачивается, сокращать время, необходимое для поворота, и сокращать время, необходимое для парковки, даже когда ширина W1 проезда является узкой. Кроме того, это может подавить величину поворота, необходимую после достижения положения поворота рулевого колеса, сократить время, в течение которого подавляется скорость транспортного средства рассматриваемого транспортного средства V1 и сократить время, необходимое для парковки, даже если ширина проезда W1 является узкой.
[0081]
Кроме того, в устройстве 1 помощи при парковке и способе помощи при парковке согласно настоящему варианту осуществления скорость рулевого управления рассматриваемого транспортного средства V1 устанавливается относительно более высокой и/или скорость транспортного средства рассматриваемого транспортного средства V1 устанавливается относительно более низкой, в случае установки длины второго участка Z2 относительно меньшей/короче. Это может подавлять величину статического рулевого управления, когда рассматриваемое транспортное средство V1 поворачивается, сокращать время, необходимое для поворота, и сокращать время, необходимое для парковки, даже когда ширина W1 проезда является узкой. Кроме того, это может подавить величину поворота, необходимую после достижения положения поворота рулевого колеса, сократить время, в течение которого подавляется скорость транспортного средства рассматриваемого транспортного средства V1 и сократить время, необходимое для парковки, даже если ширина проезда W1 является узкой.
[0082]
Кроме того, в устройстве 1 помощи при парковке и способе помощи при парковке согласно настоящему варианту осуществления скорость рулевого управления рассматриваемого транспортного средства V1 устанавливается относительно более высокой и/или скорость транспортного средства рассматриваемого транспортного средства V1 устанавливается относительно более низкой, когда ширина W1 проезда, в котором рассматриваемое транспортное средство V1 может двигаться для перемещения из текущего положения на парковочное место PS через положение поворота рулевого колеса P, меньше заданного значения. Это может подавлять величину статического рулевого управления, когда рассматриваемое транспортное средство V1 поворачивается, сокращать время, необходимое для поворота, и сокращать время, необходимое для парковки, даже когда ширина W1 проезда является узкой. Кроме того, это может подавить величину поворота, необходимую после достижения положения поворота рулевого колеса, сократить время, в течение которого подавляется (уменьшается) скорость транспортного средства рассматриваемого транспортного средства V1 и сократить время, необходимое для парковки, даже если ширина проезда W1 является узкой.
[0083]
Кроме того, в устройстве 1 помощи при парковке и способе помощи при парковке согласно настоящему варианту осуществления, чем уже ширина W1 проезда, в котором рассматриваемое транспортное средство V1 может двигаться, чтобы переместиться из текущего положения на парковочное место PS через положение поворота рулевого колеса P, тем выше установленная скорость рулевого управления рассматриваемого транспортного средства V1 и/или относительно ниже установленная скорость транспортного средства рассматриваемого транспортного средства V1 . Это может подавлять (уменьшить) величину статического рулевого управления, когда рассматриваемое транспортное средство V1 поворачивается, сокращать время, необходимое для поворота, и сокращать время, необходимое для парковки, даже когда ширина W1 проезда мала. Кроме того, это может подавлять (уменьшить) величину поворота, необходимую после достижения положения поворота рулевого колеса, сократить время, в течение которого подавляется (уменьшается) скорость транспортного средства рассматриваемого транспортного средства V1, и сократить время, необходимое для парковки, даже если ширина проезда W1 является узкой.
[0084]
Кроме того, в устройстве 1 помощи при парковке и способе помощи при парковке согласно настоящему варианту осуществления длина второго участка Z2 устанавливается с использованием по меньшей мере ширины W1 проезда, минимального радиуса поворота рассматриваемого транспортного средства V1, скорости рулевого управления рассматриваемого транспортного средства V1 и скорости транспортного средства рассматриваемого транспортного средства V1 . Это может сократить время, необходимое для поворота, и может сократить время, необходимое для парковки, и, следовательно, длина второго участка Z2 может быть соответствующим образом вычислена.
[Описание позиционных обозначений]
[0085]
1000 Система помощи при парковке
1 устройство помощи при парковке
11 Устройство управления
111 ROM
112 CPU
113 RAM
12 Устройство вывода
121 Дисплей
2 Устройство формирования изображения
2a Устройство формирования изображения, расположенное на передней части решетки радиатора транспортного средства
2b Устройство формирования изображения, расположенное под левым наружным зеркалом транспортного средства
2c Устройство формирования изображения, расположенное под зеркалом правой двери транспортного средства
2d Устройство формирования изображения, расположенное возле заднего бампера транспортного средства
3 Устройство обработки изображения
4 - Устройство определения дальности
4a Переднее устройство определения дальности определения дальности
4b Боковое устройство определения дальности
4c Заднее устройство определения дальности
5 Контроллер транспортного средства
6 Приводная система
7 Датчик скорости транспортного средства
8 Датчик угла рулевого управления
V1 Рассматриваемое транспортное средство
V2, V2a, V2b, V2c, V2d, V2e, V2f, V2g, V2h Другое транспортное средство
VP - Виртуальная точка обзора
IM1 Изображение с высоты птичьего полета
IM2 Изображение наблюдения
PS, PS1, PS2, PS3 Парковочное место
L1, L2, L3, L4, L5, L6, L7, L8, L9, L10 Линия
P, P, Pa, Pb, Pc Положение поворота рулевого колеса
W Ширина проезда
W1, W2 Ширина проезда, в котором может двигаться рассматриваемое транспортное средство
Z1, Z1a, Z1b, Z1c Первый участок
Z2, Z2a, Z2b Второй участок
Z3 Третий участок
T1, T4 Участок, соответствующий первому участку
T2, T5 Участок, соответствующий второму участку
T3, T6 Участок, соответствующий третьему участку
Z-A Участок для перемещения рассматриваемого транспортного средства из текущего положения до положения поворота рулевого колеса P с постоянным углом рулевого управления.
Z-B Участок для перемещения рассматриваемого транспортного средства V1 из положения поворота рулевого колеса P на парковочное место PS
T-A Участок, соответствующий участку Z-A
TB Участок, соответствующий статическому рулевому управлению рассматриваемого транспортного средства в положении поворота рулевого колеса P
T-C Участок, соответствующий участку Z-B.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОМОЩИ ПАРКОВКИ ДЛЯ УСТРОЙСТВА УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2741680C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2019 |
|
RU2804496C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734740C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2729330C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2746684C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740111C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ ДЛЯ УСТРОЙСТВА ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734643C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОМОЩИ ПРИ ПАРКОВКЕ | 2016 |
|
RU2707409C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2738780C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И АППАРАТУРА УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2744447C1 |
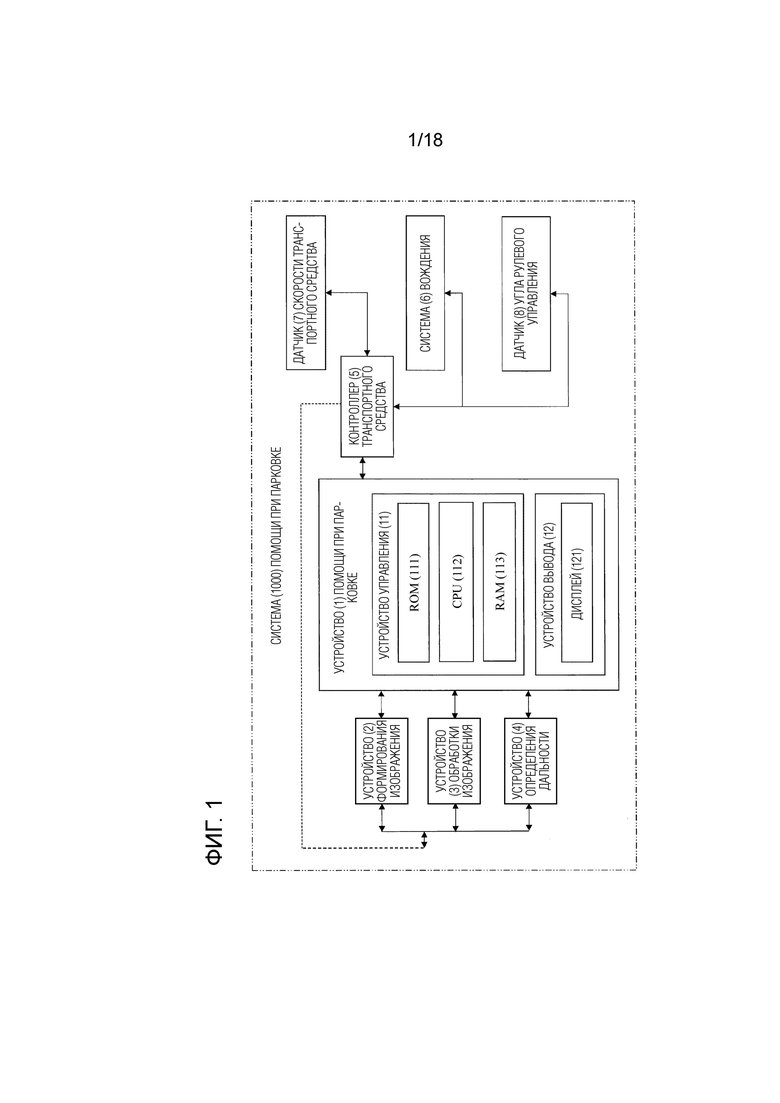
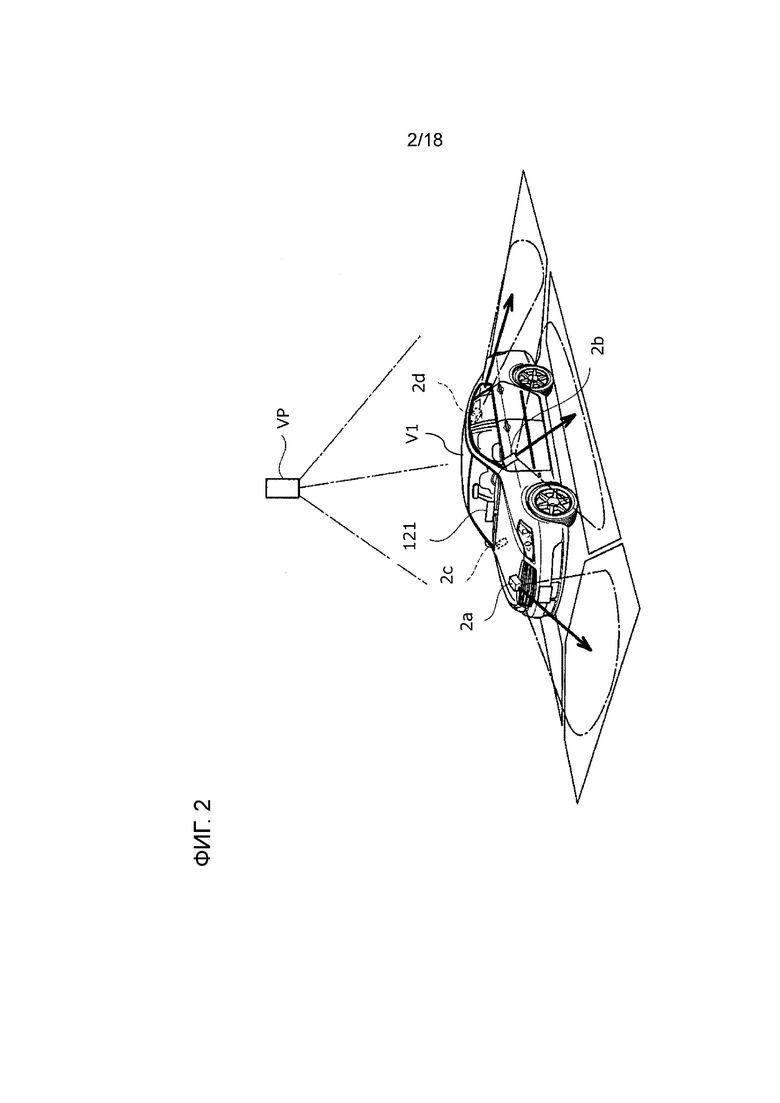




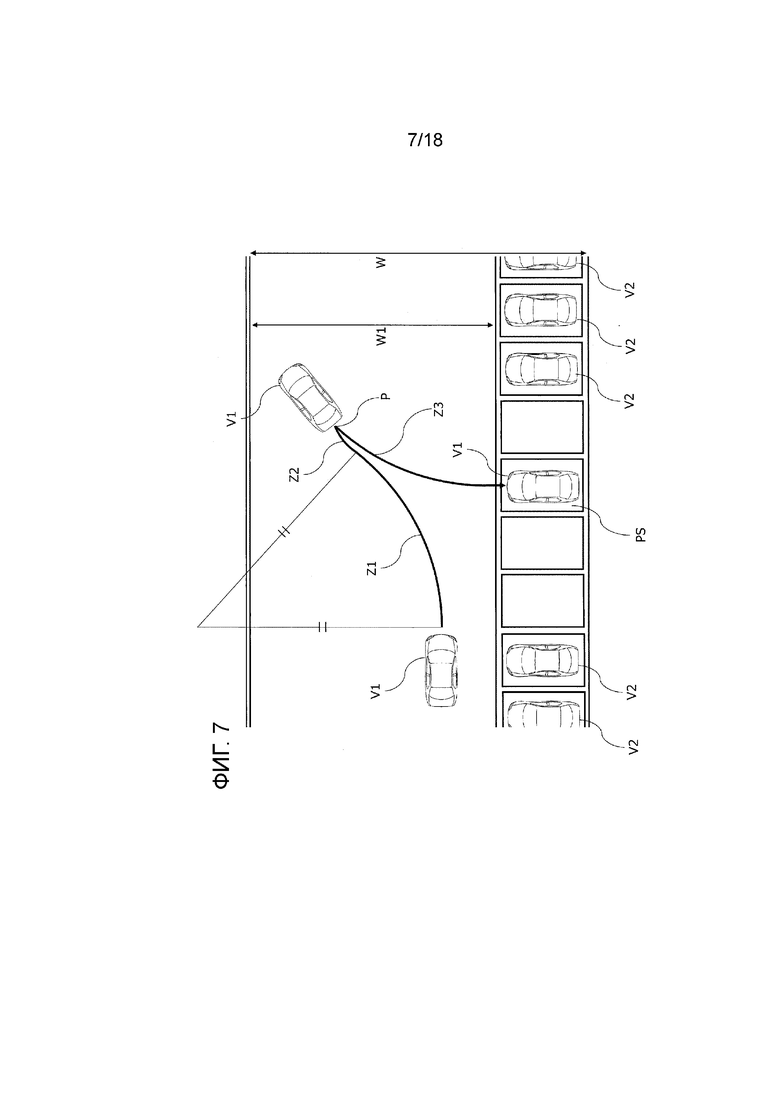




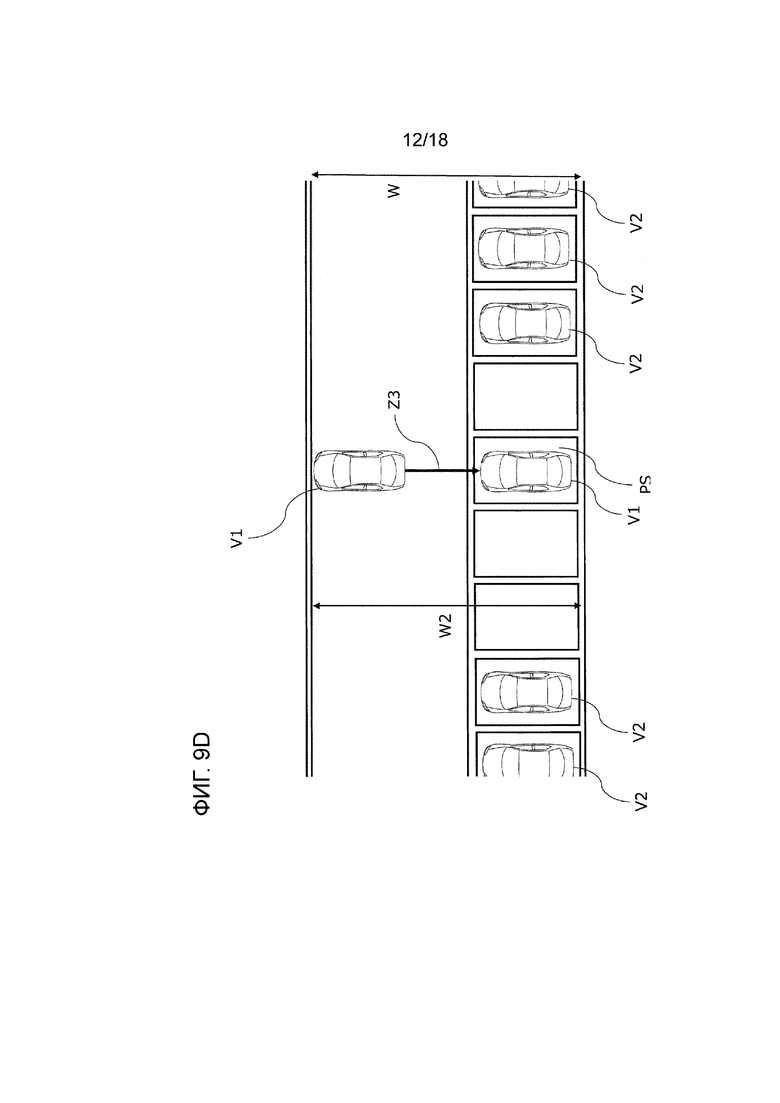

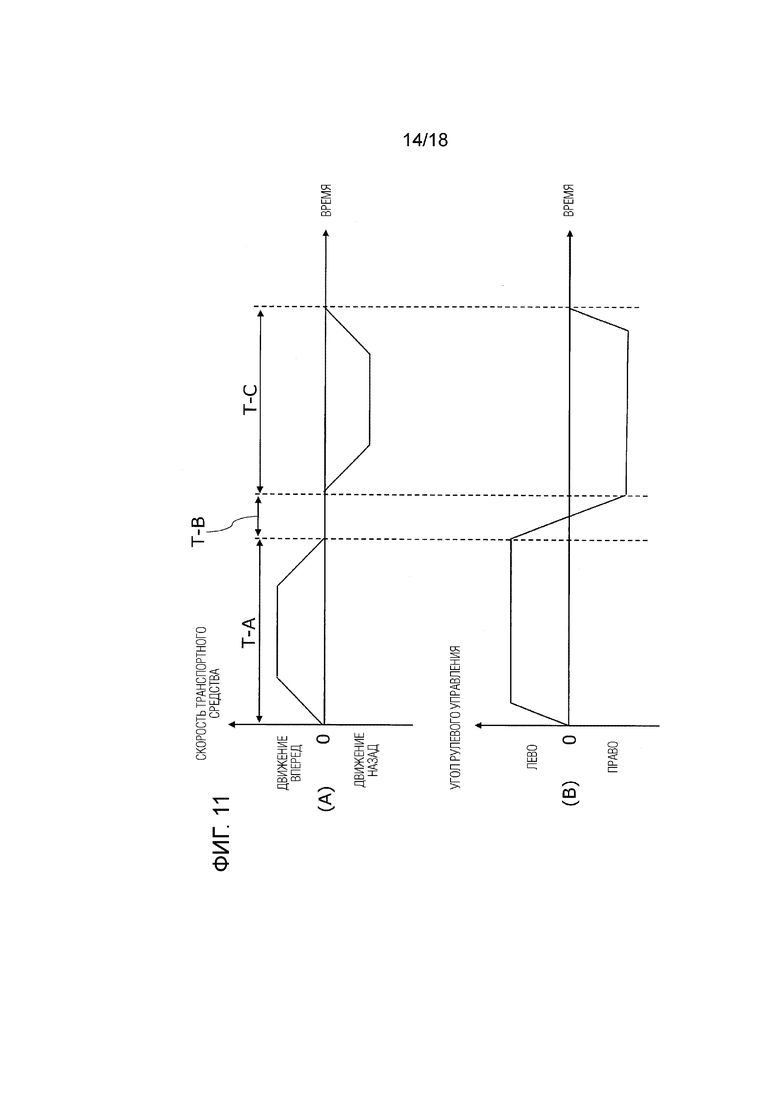

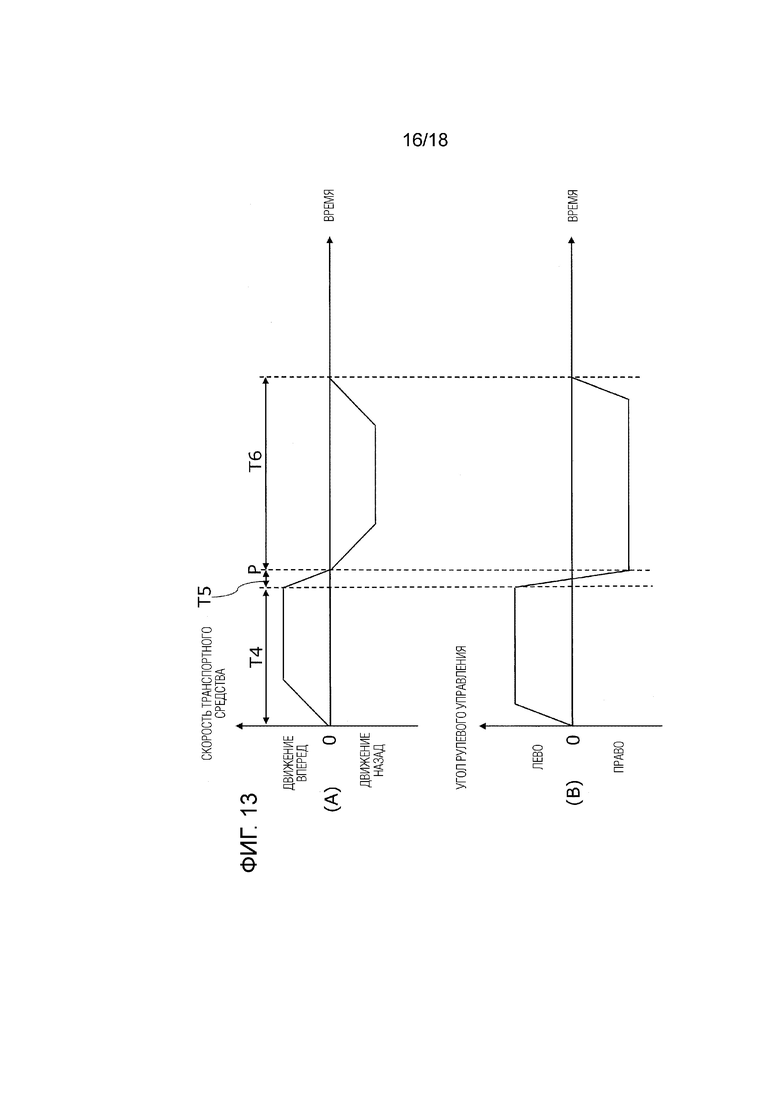
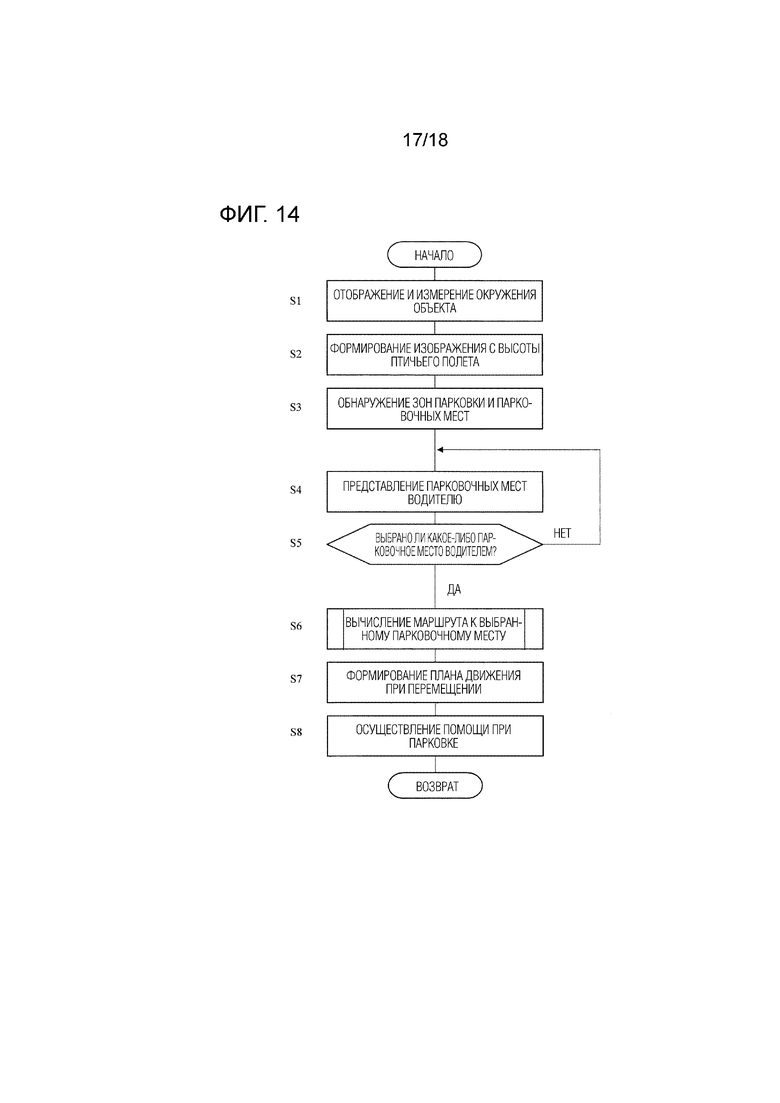
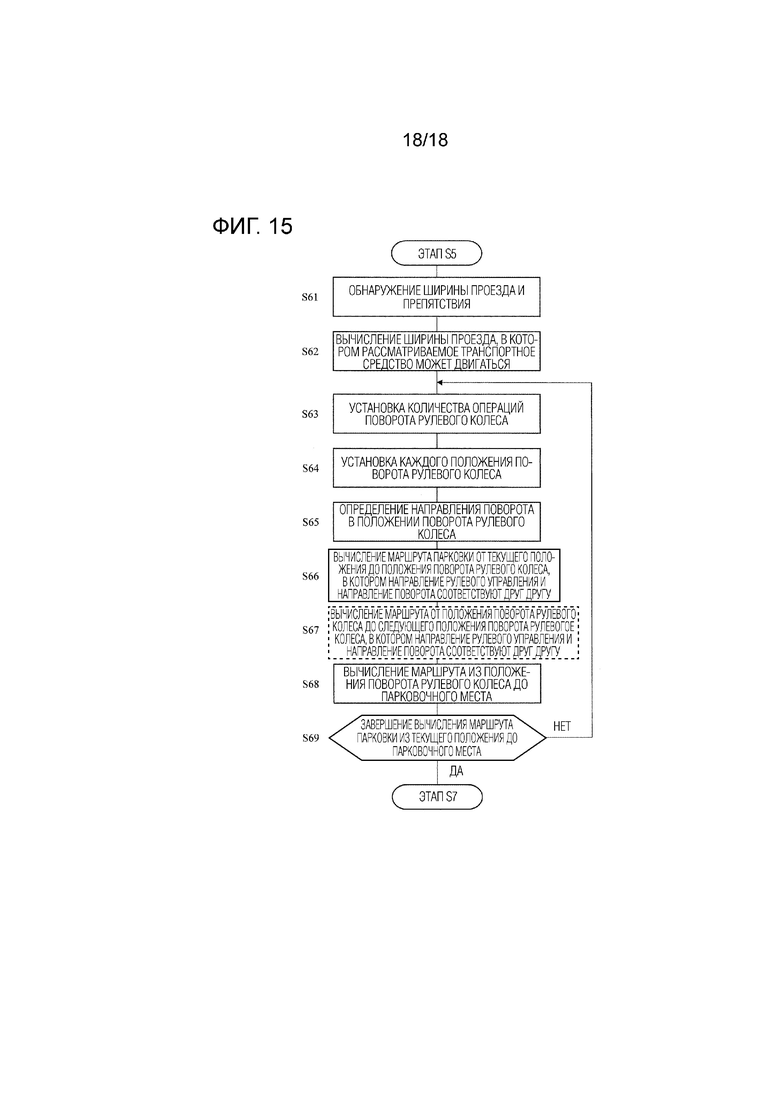
Изобретение относится к способу помощи при парковке и устройству помощи при парковке. Способ помощи при парковке включает в себя обнаружение парковочного места для парковки рассматриваемого транспортного средства (ТС), установку положения поворота рулевого колеса, при этом рулевое колесо рассматриваемого ТС поворачивается в положение поворота рулевого колеса, формирование маршрута парковки для достижения из текущего положения рассматриваемого ТС парковочного места через положение поворота рулевого колеса, и управление рассматриваемым ТС для автономного движения по маршруту парковки. При формировании маршрута парковки дополнительно определяется направление поворота, в которое поворачивает рассматриваемое ТС на маршруте для движения из положения поворота рулевого колеса до парковочного места, и формируется маршрут из текущего положения рассматриваемого ТС до положения поворота рулевого колеса так, что направление рулевого управления рассматриваемого ТС соответствует направлению поворота в то время, когда рассматриваемое ТС остановлено в положении поворота рулевого колеса. Обеспечивается помощь при парковке ТС. 2 н. и 6 з.п. ф-лы, 18 ил.
1. Способ помощи при парковке, содержащий:
обнаружение парковочного места для парковки рассматриваемого транспортного средства;
установку положения поворота рулевого колеса, причем рулевое колесо поворачивается в положение поворота рулевого колеса;
формирование маршрута парковки для достижения из текущего положения рассматриваемого транспортного средства до парковочного места посредством положения поворота рулевого колеса; и
управление рассматриваемым транспортным средством для автономного движения по маршруту парковки,
при этом способ помощи при парковке дополнительно содержит:
определение направления поворота, в которое поворачивает рассматриваемое транспортное средство по маршруту движения из положения поворота рулевого колеса до парковочного места; и
формирование маршрута из текущего положения рассматриваемого транспортного средства до положения поворота рулевого колеса таким образом, что направление рулевого управления рассматриваемого транспортного средства соответствует направлению поворота в то время, когда рассматриваемое транспортное средство остановлено в положении поворота рулевого колеса.
2. Способ помощи при парковке по п. 1, в котором
угол рулевого управления рассматриваемого транспортного средства в то время, когда рассматриваемое транспортное средство остановлено в положении поворота рулевого колеса, равен углу рулевого управления, когда рассматриваемое транспортное средство начинает движение к парковочному месту из положения поворота рулевого колеса.
3. Способ помощи при парковке по п. 1 или 2, содержащий:
установку скорости рулевого управления рассматриваемого транспортного средства на относительно более высокую и/или установку скорости транспортного средства рассматриваемого транспортного средства на относительно более низкую, когда ширина проезда, позволяющая рассматриваемому транспортному средству движение для перемещения из текущего положения рассматриваемого транспортного средства до парковочного места через положение поворота рулевого колеса, является узкой по сравнению со случаем, когда ширина проезда, позволяющая рассматриваемому транспортному средству движение для перемещения из текущего положения рассматриваемого транспортного средства до парковочного места через положение поворота рулевого колеса, является широкой.
4. Способ помощи при парковке по любому из пп. 1-3, в котором
маршрут парковки включает в себя по меньшей мере:
первый участок, который представляет собой участок от текущего положения рассматриваемого транспортного средства до положения перед положением поворота рулевого колеса, где рассматриваемое транспортное средство перемещается с постоянным углом рулевого управления;
второй участок, который представляет собой участок, следующий за первой участком и предшествующий положению поворота рулевого колеса, в которое включено положение поворота рулевого колеса; и
третий участок, который является участком, следующим за вторым участком, где рассматриваемое транспортное средство повернуто в направлении перемещения к парковочному месту.
5. Способ помощи при парковке по п. 4, содержащий:
установку относительно меньшей длины второго участка, когда ширина проезда, позволяющая рассматриваемому транспортному средству движение для перемещения из текущего положения рассматриваемого транспортного средства до парковочного места через положение поворота рулевого колеса, является узкой, по сравнению со случаем, когда ширина проезда, позволяющая рассматриваемому транспортному средству движение для перемещения из текущего положения рассматриваемого транспортного средства до парковочного места через положение поворота рулевого колеса, является широкой.
6. Способ помощи при парковке по п. 5, содержащий:
установку скорости рулевого управления рассматриваемого транспортного средства на относительно более высокую и/или установку скорости транспортного средства рассматриваемого транспортного средства на относительно более низкую, когда длина второго участка установлена относительно меньшей.
7. Способ помощи при парковке по любому из пп. 4-6, содержащий:
установку длины второго участка с использованием по меньшей мере ширины проезда, позволяющей рассматриваемому транспортному средству движение для перемещения из текущего положения рассматриваемого транспортного средства до парковочного места через положение поворота рулевого колеса, минимальный радиус поворота рассматриваемого транспортного средства, скорость рулевого управления рассматриваемого транспортного средства и скорость транспортного средства рассматриваемого транспортного средства.
8. Устройство помощи при парковке, содержащее устройство управления, выполненное с возможностью:
обнаружения парковочного места для парковки рассматриваемого транспортного средства;
установки положения поворота рулевого колеса, при этом рулевое колесо поворачивается в положение поворота рулевого колеса;
формирования маршрута парковки для достижения из текущего положения рассматриваемого транспортного средства парковочного места через положение поворота рулевого колеса; и
управления рассматриваемым транспортным средством для автономного движения по маршруту парковки,
при этом устройство управления дополнительно выполнено с возможностью:
определения направления поворота, в которое поворачивает рассматриваемое транспортное средство по маршруту движения из положения поворота рулевого колеса до парковочного места; и
формирования маршрута из текущего положения рассматриваемого транспортного средства до положения поворота рулевого колеса таким образом, что направление рулевого управления рассматриваемого транспортного средства соответствует направлению поворота в то время, когда рассматриваемое транспортное средство остановлено в положении поворота рулевого колеса.
| JP 2019064431 A, 25.04.2019 | |||
| US 9862416 B2, 09.01.2018 | |||
| US 8205704 B2, 26.06.2012 | |||
| Устройство для автоматического поддержания колебательного движения часовой системы баланс - спираль | 1950 |
|
SU97312A1 |

